基于COSMOSMotion的弹齿滚筒捡拾器运动仿真
滚齿加工运动三维仿真

滚齿加工运动三维仿真
张荣闯;王军;王博;王宛山
【期刊名称】《系统仿真学报》
【年(卷),期】2015(0)11
【摘要】针对滚齿加工仿真中由于模型简化而带来的仿真精度问题,提出了基于实体造型的滚齿加工运动三维仿真方法;通过对滚刀与工件之间的运动关系、位置关系分析,建立了基于时间驱动的滚齿加工运动矢量模型。
基于UG(Unigraphics NX)二次开发平台,分别构建了滚刀刀齿前刀面几何模型与刀齿空间运动轨迹曲线几何模型,并将二者进行联立构造出滚刀刀齿空间三维扫掠几何实体。
将每个工作刀齿所形成的刀齿扫掠几何实体与瞬时齿槽几何实体进行布尔减运算,得到各刀齿在其展成位置切削去除的未变形几何切屑实体与最终仿真齿廓几何模型。
齿轮端面仿真齿廓与理论渐开线齿廓比较,验证了所提出方法的有效性与精确性。
【总页数】6页(P2729-2734)
【作者】张荣闯;王军;王博;王宛山
【作者单位】东北大学机械工程与自动化学院
【正文语种】中文
【中图分类】TG612;TP391.72
【相关文献】
1.滚齿加工原理三维动态仿真软件开发
2.滚齿数控加工运动分析与图形仿真
3.基于滚齿仿真的齿轮三维建模的研究与实现
4.AutoCAD环境下滚齿加工原理三维动态仿真的实现
5.弧齿锥齿轮铣齿加工三维应力仿真及分析
因版权原因,仅展示原文概要,查看原文内容请购买。
打瓜机捡拾辊筒部件起升过程强度分析——基于ANSYS Workbench

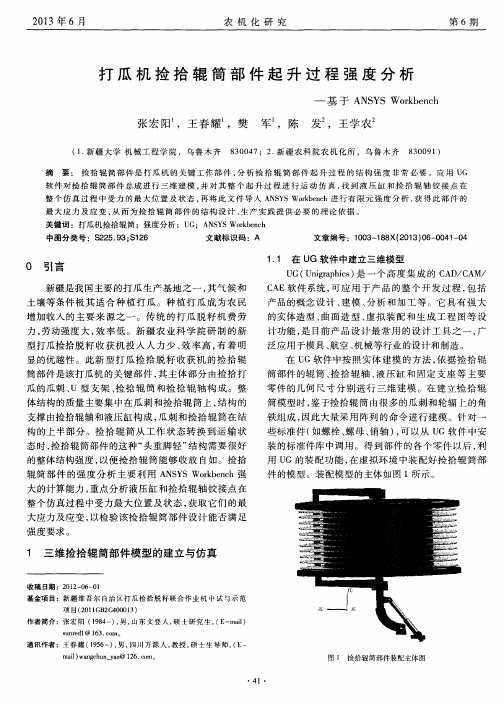
打瓜机捡拾辊筒部件起升过程强度分析——基于ANSYSWorkbench张宏阳;王春耀;樊军;陈发;王学农【摘要】捡拾辊筒部件是打瓜机的关键工作部件,分析捡拾辊筒部件起升过程的结构强度非常必要.应用UG软件对捡拾辊筒部件总成进行三维建模,并对其整个起升过程进行运动仿真,找到液压缸和捡拾辊轴铰接点在整个仿真过程中受力的最大位置及状态,再将此文件导入ANSYS Workbench进行有限元强度分析,获得此部件的最大应力及应变,从而为捡拾辊筒部件的结构设计、生产实践提供必要的理论依据.【期刊名称】《农机化研究》【年(卷),期】2013(035)006【总页数】4页(P41-44)【关键词】打瓜机捡拾辊筒;强度分析;UG;ANSYS Workbench【作者】张宏阳;王春耀;樊军;陈发;王学农【作者单位】新疆大学机械工程学院,乌鲁木齐830047;新疆大学机械工程学院,乌鲁木齐830047;新疆大学机械工程学院,乌鲁木齐830047;新疆农科院农机化所,乌鲁木齐830091;新疆农科院农机化所,乌鲁木齐830091【正文语种】中文【中图分类】S225.93;S1260 引言新疆是我国主要的打瓜生产基地之一,其气候和土壤等条件极其适合种植打瓜。
种植打瓜成为农民增加收入的主要来源之一。
传统的打瓜脱籽机费劳力,劳动强度大,效率低。
新疆农业科学院研制的新型打瓜捡拾脱籽收获机投入人力少、效率高,有着明显的优越性。
此新型打瓜捡拾脱籽收获机的捡拾辊筒部件是该打瓜机的关键部件,其主体部分由捡拾打瓜的瓜刺、U型支架、捡拾辊筒和捡拾辊轴构成。
整体结构的质量主要集中在瓜刺和捡拾辊筒上,结构的支撑由捡拾辊轴和液压缸构成,瓜刺和捡拾辊筒在结构的上半部分。
捡拾辊筒从工作状态转换到运输状态时,捡拾辊筒部件的这种“头重脚轻”结构需要很好的整体结构强度,以便捡拾辊筒能够收放自如。
捡拾辊筒部件的强度分析主要利用ANSYS Workbench强大的计算能力,重点分析液压缸和捡拾辊轴铰接点在整个仿真过程中受力最大位置及状态,获取它们的最大应力及应变,以检验该捡拾辊筒部件设计能否满足强度要求。
打瓜机捡拾辊筒部件起升过程强度分析——基于ANSYS Workbench
体 结构 的质 量 主 要集 中在 瓜 刺 和 捡 拾 辊 筒 上 , 结 构 的 支撑 由捡拾 辊 轴 和液 压 缸 构 成 , 瓜 刺 和捡 拾 辊 筒 在 结 构 的上 半 部 分 。捡 拾 辊 筒 从 工 作 状 态 转 换 到 运 输 状
土壤等条件 极其适合 种植打瓜 。种植 打瓜成 为农 民
增加 收 入 的 主 要 来 源 之 一 。 传 统 的 打 瓜 脱 籽 机 费 劳 力, 劳 动强 度 大 , 效 率 低 。新 疆 农 业 科 学 院研 制 的新 型 打瓜 捡拾 脱 籽 收 获 机 投 人 人 力 少 、 效率 高 , 有 着 明
泛 应用 于模具 、 航空 、 机 械 等行 业 的设 计和 制造 。
在U G软件中按照实体建模 的方 法 , 依据捡 拾辊
筒 部件 的辊 简 、 捡 拾辊轴 、 液 压 缸 和 固 定 支 座 等 主 要 零 件 的 几何 尺寸 分 别 进 行 三 维 建 模 。在 建 立 捡 拾 辊 筒模型时, 鉴 于 捡拾 辊 筒 由很 多 的瓜 刺 和轮 辐 上 的角 铁组成 , 因此 大 量采 用 阵列 的命 令 进行 建模 。针 对 一 些 标 准件 ( 如 螺栓 、 螺母 、 销轴 ) , 可 以从 U G软 件 中安 装 的标 准 件库 中调 用 。得 到 部 件 的各 个 零 件 以后 , 利
0 引言
新 疆 是 我 国主 要 的 打瓜 生产 基 地 之 一 , 其 气 候 和
1 . 1 在U G 软 件 中建立 三维模 型 U G( U n i g r a p h i c s ) 是 一 个 高度 集 成 的 C A D / C AM / C A E软 件 系统 , 可 应 用 于产 品 的 整 个 开 发 过 程 , 包 括
基于ADAMS的采棉滚筒运动仿真分析
基于 ADAMS的采棉滚筒运动仿真分析摘要:采棉滚筒是水平摘锭式采棉机的核心工作部件,其工作的可靠性直接影响着采棉机的采摘质量和作业效率。
本文介绍了采棉滚筒的结构及工作原理,首先利用Pro/E软件建立了采棉滚筒的三维模型,然后使用ADAMS软件进行运动仿真,分析其运动规律,为采棉滚筒的设计和研究提供了理论依据和参考。
关键词:采棉滚筒;ADAMS;运动仿真0 引言棉花是我国新疆的主要农业产品,棉花生产收获实现机械化是社会发展的必然趋势。
手工采棉不但劳动量大、效率低,而且棉花生产成本高,这意味着生产力没有彻底解放。
现阶段国内大部分自主研发的采棉机仍然处于科研和试验阶段,未来的发展趋势是:充分利用机电一体化技术,提高采棉机的可靠性和采摘质量,使采棉机操作更加简便,方便棉农使用;因地制宜,研制适合不同地区的机采棉设备,完善与采棉机相配套的机械设备;加快研制适合我国的经济型采摘部件[1]。
因此,使用ADAMS软件对水平摘锭式采棉机中的采摘滚筒进行仿真为以后的采棉机设计提供依据。
1 采棉滚筒的运动分析方法ADAMS软件由美国公司所开发,是目前国际上比较通用和权威的动力分析软件之一,由核心模块、功能扩展模块、专业模块、接口模块、工具箱模块几大模块组成。
利用ADAMS能够快捷、有效地建立简单的机械系统所需要的几何模型,即能够直接用ADAMS中ADAMS/View来创建机械系统模型,也可以从其他三维建模软件中直接导入。
在利用三维软件直接导入之后,需要在模型上添加零件的材料、零件之间的相互约束、驱动力等之后才可以实现运动仿真和分析。
因直接在ADAMS里建立比较复杂的几何形状不太容易,所以这次使用Pro/Engineer(Pro/E)建立好模型之后再导入ADAMS软件中。
Pro/E与ADAMS中没有直接的连接口,所以需要转化成可以在ADAMS中使用的格式。
例如stp、x_t、xmt_txt、bin等格式,本文中采用x_t格式。
ug运动仿真中拾取传递的力

ug运动仿真中拾取传递的力 在UG运动仿真中,对于机器人夹爪在进行物体拾取传递时所受到的力是一个非常重要的因素。通过对这些力的研究和分析,可以更好地了解机器人在执行特定任务时的性能表现,从而优化其运动控制和路径规划。
在进行物体拾取传递任务时,机器人夹爪需要施加适当的力量来抓取物体,并在传递过程中保持稳定。这些力量包括抓取力、摩擦力、惯性力等。抓取力是夹爪对物体施加的力,必须足够大以确保牢固地抓住物体,但又不能太大以避免损坏物体。摩擦力则是指夹爪与物体接触面之间的摩擦阻力,必须克服摩擦力才能移动物体。惯性力则是在物体传递过程中产生的力,需要通过合适的控制来平衡物体的惯性。
通过UG运动仿真软件,可以模拟机器人夹爪在进行物体拾取传递任务时所受到的力。通过对模拟结果的分析,可以优化夹爪的设计和控制算法,以提高机器人的性能和效率。例如,可以调整夹爪的抓取力和摩擦系数,以确保稳定地抓取和传递物体。同时,还可以优化路径规划算法,以减小惯性力对机器人运动的影响,提高传递的准确性和速度。
除了力的影响外,还需考虑机器人夹爪的姿态和动作规划。在物体拾取传递任务中,夹爪的姿态必须合适,以确保夹住物体的稳定性。同时,夹爪的动作规划也很重要,需要考虑到物体的形状、重量和惯性等因素,以确保夹爪能够准确地抓取和传递物体。 总的来说,UG运动仿真中的物体拾取传递任务涉及到多个方面的因素,包括力的影响、夹爪的姿态和动作规划等。通过对这些因素的综合考虑和优化,可以提高机器人在执行任务时的性能和效率,从而更好地满足工业生产和服务的需求。通过不断地研究和实践,相信机器人在物体拾取传递任务中的表现会越来越优秀,为人类的生产和生活带来更多的便利和效益。
采棉机采摘滚筒运动规律的研究
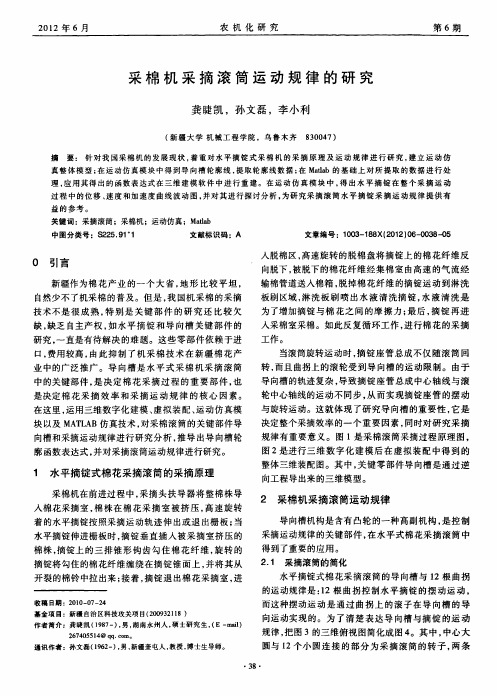
采棉机采摘滚筒运动规律的研究龚睫凯,孙文磊,李小利(新疆大学机械工程学院,乌鲁木齐830047)摘要:针对我国采棉机的发展现状,着重对水平摘锭式采棉机的采摘原理及运动规律进行研究,建立运动仿真整体模型;在运动仿真模块中得到导向槽轮廓线,提取轮廓线数据;在M at l ab的基础上对所提取的数据进行处理,应用其得出的函数表达式在三维建模软件中进行重建。
在运动仿真模块中,得出水平摘锭在整个采摘运动过程中的位移、速度和加速度曲线波动图,并对其进行探讨分析,为研究采摘滚筒水平摘锭采摘运动规律提供有益的参考。
关键词:采摘滚筒;采棉机;运动仿真;M at l a b中图分类号:s225.91+1文献标识码:A文章编号:1003—188×【2012)06—0038_050引言新疆作为棉花产业的一个大省,地形比较平坦,自然少不了机采棉的普及。
但是,我国机采棉的采摘技术不是很成熟,特别是关键部件的研究还比较欠缺,缺乏自主产权,如水平摘锭和导向槽关键部件的研究,一直是有待解决的难题。
这些零部件依赖于进口,费用较高,由此抑制了机采棉技术在新疆棉花产业中的广泛推广。
导向槽是水平式采棉机采摘滚筒中的关键部件,是决定棉花采摘过程的重要部件,也是决定棉花采摘效率和采摘运动规律的核心因素。
在这里,运用三维数字化建模、虚拟装配、运动仿真模块以及M A T LA B仿真技术,对采棉滚筒的关键部件导向槽和采摘运动规律进行研究分析,推导出导向槽轮廓函数表达式,并对采摘滚筒运动规律进行研究。
1水平摘锭式棉花采摘滚筒的采摘原理采棉机在前进过程中,采摘头扶导器将整棉株导人棉花采摘室,棉株在棉花采摘室被挤压,高速旋转着的水平摘锭按照采摘运动轨迹伸出或退出栅板;当水平摘锭伸进栅板时,摘锭垂直插入被采摘室挤压的棉株,摘锭上的三排锥形钩齿勾住棉花纤维,旋转的摘锭将勾住的棉花纤维缠绕在摘锭锥面上,并将其从开裂的棉铃中拉出来;接着,摘锭退出棉花采摘室,进收稿日期:2010一07—24基金项目:新疆自治区科技攻关项目(200932118)作者简介:龚睫凯(1987一),男,湖南永州人。
基于SolidWorks的行星齿轮机构运动仿真模型
基于SolidWorks的行星齿轮机构运动仿真模型发表时间: 2009-2-6 作者: 崔利杰龚小平李玉超来源: 万方数据关键字: CAE运动仿真行星齿轮机构 SolidWorks 二次开发 COSMO对SolidWorks软件进行了二次开发,实现了渐开线齿轮的精确建模,建立了某型直升机主减速器内两级行星传动机构在SolidWorks软件中的装配体模型,应用COSMOSMotion软件进行了机构运动仿真,为机构设计提供了一种高效、直观的仿真手段,提高了行星齿轮传动机构的分析设计能力。
引言行星齿轮传动以其结构紧凑,承载能力强和较低的轴承载荷广泛应用于航空、船舶、汽车、冶金等各个领域。
特别是由于特殊的工作环境,行星齿轮传动仍然占据当今世界直升机主减速器系统中的主流地位。
目前,以数字化装配和计算机仿真分析为主要内容的虚拟样机技术在机械设计与制造中得到了广泛应用,但由于行星齿轮结构相对复杂、行星齿轮同时具有内啮合和外啮合,需要相当精准的造型和装配技术,因此构建行星齿轮机构虚拟样机显得相对困难。
基于此,本文利用SolidWorks软件强大的建模功能和二次开发能力,以某型直升机主减速器内两级行星齿轮传动机构为例,构建了行星齿轮机构模型,结合SolidWorks 内嵌的COSMOSMotion软件完成了其运动仿真。
1齿轮模型的生成1.1 SolidWorks二次开发简介SolidWorks是基于Windows平台的三维机械设计软件,它的设计数据可以全部在外部通过API接口修改。
SolidWorks提供的API接口有OLE技术和COM组件两种形式,为用户提供了强大的二次开发功能。
具有OLE编程和COM接口编程的开发工具,如Visual C++.Visual Basic,Delphi等均可用于SolidWorl国的二次开发,创建出用户定制的、专用的SolidWorks功能模块。
除此之外,SolidWorks还提供了内置的宏命令编程,使得SolidWorks的定制更加容易。
滚筒药柜传动部分运动不干涉分析与仿真_王磊
( 2)
2. 2 运动第 2 阶段 当 H0< H1 [ H0+ H2 时, O1、O 2 同时沿半径为 r 的
圆弧运动, 储药斗 1 支轴中心 A 1 做沿半径为 R 的圆 弧运动, O 3、O 4 与储药斗 2 支轴中心 A 2 继续做竖直向 上运动直至 O3 与 O 在同一水平线。由式( 1) 得出
0 [ r- R cos ( H1- H0/ 2) [ w ( 3)
R cos ( H1- H0/ 2) - r sin H1+ 1. 5mp + np > h 2. 3 运动第 3 阶段
当 H0+ H2 < H1 [ P时, O 1、O 2 同时沿半径为 r 的 圆弧运动, 储药斗 1 支轴中心 A 1 做沿半径为 R 的圆 弧运动, 直至 O 1 与 O 在同一水平线上。O 3 沿半径为 r 的圆弧运动, O4 继续做竖直 向上运动, 储药斗 2 支 轴中心 A 2 做变直径的圆弧旋转
设储药斗 1、储药斗 2 运动中, 支轴中心 A 1 和 A 2 在水平方向和竖直方向的距离为 $X 和 $Y, 则相邻两
储药斗运动不干涉条件为
若 0 [ $X [ w , 则需
| $Y | > h
( 1)
在 $X > w 时, 相邻储药斗运动一定无干涉[ 6] 。
如图 2 所示, 储药斗支轴中心 A 1、A 2 在以从动链 轮中心 O 做圆弧旋转时, 该圆弧并非是一个完整的半
借助 Matlab, 可求解出第三阶段 X 2、Y2 的解析式
$X 3= X 2- X 1
$Y3= Y1- Y2 由式( 3) 得出
0 [ $X 3 [ w ( 4)
$Y3> h 2. 4 运动第 4 阶段
基于Solidworks的机械手三维建模及其运动仿真
5 结语
责任编辑:于淑清 收稿日期:2010-04-14
215
第 31 卷第 10 期
基于 Solidworks 的机械手三维建模及其运动仿真— ——夏学文,等
Vol.31No.10
1.1 机械手零部件的三维建模
的零部件会自动定义为固定静止的部件,然后依次
Solidworks 零部件的建模过程为: 首先选取合 插入 各 零 部 件 ,通 过 一 系 列 的 配 合 约 束 关 系 ,装 配
[5]吴序堂. 齿轮啮合原理[M]. 西安:西安交通大学出版社,2009. [6]刘鹄然,赵东福,宋德玉. 现代啮合理论[M]. 杭州:浙江大学出版
社 ,2008. 作 者 简 介 : 耿 金 萍 (1984- ),女 ,江 苏 徐 州 人 ,中 国 矿 业 大 学 机
电 学 院 ,研 究 生 ,机 械 制 造 及 其 自 动 化 专 业 ,电 话 :0516-83590278 , 电 子 信 箱 :gengjinping188@.
注意的问题。 有些零部件特征相当的复杂,例如铲 零部件”命令,依次如图 1 所示,排列各零部件,顺
臂爪臂的建模。 因为它的主体特征是一个比较复杂 序按照从上到下排列。 注意插入的零部件应该集中
的曲面,所以需要熟练曲面建模的命令。 曲面建模 在一个区域,不要过于分散,以便于下一步装配步
通过带 控 制 线 的 扫 描 曲 面 、放 样 曲 面 、边 界 曲 面 以 骤 。 (3)装 配 时 ,将 所 有 的 零 部 件 通 过 “重 合 ”、“平
1.2 机械手的装配 Solidworks 提供了强大的装配功能,其优点为:
(1)在 装 配 体 环 境 下 ,可 以 方 便 地 设 计 及 修 改 零 部
基于COSMOSMotion轴承套圈方向转换机构设计及仿真
基于COSMOSMotion轴承套圈方向转换机构设计及仿真潘振;邱望标;逯博文;李宜汀;李哲【摘要】主要是设计隧道式交变磁场去应力装置中的轴承套圈的转向机构,利用SolidWorks三维设计软件通过拉伸、切除、阵列、扫描等特征方法[1]对该机构进行三维建模,然后运用运动仿真插件COSMOSMotion对三维模型进行运动仿真,得到轴承套圈的速度和加速度曲线,对比仿真结果修改设计方案.通过三维建模和运动仿真提高了机构设计的形象性和直观性[2].【期刊名称】《现代机械》【年(卷),期】2016(000)001【总页数】3页(P43-45)【关键词】SolidWorks;COSMOSMotion;仿真;三维建模【作者】潘振;邱望标;逯博文;李宜汀;李哲【作者单位】贵州大学,贵州贵阳550000;贵州大学,贵州贵阳550000;贵州大学,贵州贵阳550000;贵州大学,贵州贵阳550000;贵州大学,贵州贵阳550000【正文语种】中文【中图分类】TH122;TP391.9[3] Zhengdao Tang, Pengcheng Long, Shanqing Huang, Zou Jun.Real-time dose assessment and visualization of radiation field for EAST tokamak [J].Fusion Engineering and Design,2010,85(7):1591-1594.[4] 任国栋,陈林华,陶学锋,等. 基于Unity3D的虚拟博物馆信息可视化系统[J]. 计算机系统应用,2013,22(9):86-90.[5] 马龚丽,杨敏,等. 基于Unity3D的三维海底地形建模[J]. 安徽电子信息职业技术学院学报,2013,12(6):24-27.[6] 韩桂明,周凌,赵志鹏. 基于Unity3D的房间仿真技术[J]. 电子测试,2014,12(11):49-51.[7] 马瑞. 基于Unity3D的多平台三维虚拟数字校园的设计与实现[J]. 蚌埠学院学报,2014,3(2):13-16.[8] 郑阿奇. Visual C++实用教程[M]. 北京:电子工业出版社,2007:13-16.[9] 张孟娟. 电力运营监控可视化管理研究[D]. 西南财经大学,2013.[10] 李莉. 攀枝花电业局三维可视化变电设备信息管理系统的设计与实现[D]. 电子科技大学,2012.[11] 崔瀛潇. 基于Unity3D引擎的三维可视化技术在煤炭地震勘探中的应用[J]. 中国煤炭地质,2014,26(4):58-63.随着计算机技术的进步与发展,三维设计软件在机械设计中的应用越来越广泛[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动, 通过轮盘 4 带动管轴 8 上的滚轮 2 沿滑道滚轮 盘 5运动 . 从而使 与之 固定 的弹齿 1 从护 板 7内伸
出, 捡拾起 秸秆 , 到一定 高度后 , 达 弹齿从 秸秆 中J 项
利抽 出 、 缩进 护板 7 秸秆 转到 护板后 的收集箱 中 , ,
插在 Sl Wo s od r 的机械运动仿真插件。它可 以对 i k
( a uV ct nl n eh i l o ee L iu2 0 ,C ia L i oa oa adT c n a C l g , a 7 0 hn ) w i c l w 1 1
Ab ta t h r c p e o p n — n e l d rP c u si t d c d s r c :T e p n i l fS r g f g rCyi e ik- p i n r u e .Usn oi W o k ot a e h e t i s o p n - i i i n o ig S l d r s s f r .t e n i e f S r g w t i f g r y id r P c u s r b i a d s e l d n t e p n fn e l d r ik- p S i e C l e ik— p a e u l n a s mb i a d h S r g— i g r Cyi e P c u mo in s mua e b n n t e i n t i o e lt d y COS MOS t n h u v s o t n a d fr e r a n d, te r s l i a ay e .B h mu ai n f me h n s Moi .T e c r e f Mo i n o c ae g i e o o h eut s n lzd y t e e l t o c a im, t e o h e c e c f c a i Sd sg si r v d i f in yo me h n s e i n i m mp o e . Ke wo d COS y r s: MOS t n; p n - n e y id r ik u s mu ai n Mo i o S r g f g rC l e c - p ;e l t i i n P o
与车辆 工 程
A RC L U A Q IME T& V HIL N I E R N G I U T R LE U P N E C EE GN E I G
No 8 0 0 . 2 1
( 总第 2 9 ) 2期
( oay2 9 T tl 2 ) l
Em u a i n o p i l t f rn o S
n e l d rP c - p SM o i n Ba e n COS OS o i n g rCy i e i k u t s d o n o M M t o
S u - i , S h o r i,W U Xi - i UN G i b n UN Z a — u u b n, L n , L h — a I Yi g IS i b n
Sl Wok 中装配好 的机 构模 型进行 运动分 析 , od rs i 得
出相关 的曲线 。 以直 观和生动地 反映机构 的运动 可
弹齿 转过 一定 角度 后 , 又从 护 板 中伸 出 , 续捡拾 继
基于 C MOS t n的弹齿滚筒捡拾器运动仿真 OS M0 i 0
孙贵斌 , 孙召瑞 , 吴修彬 , 李英 , 李世班
( 莱芜职业技术学 院 机电系 ,山东 莱芜 2 1O ) 7 O l
摘 要 : 绍 了弹 齿 滚 筒 捡 拾 器 工作 原理 , 用 Sl Wok 软 件 建 立 和 装 配 弹齿 滚 筒捡 拾 器的 实体 模 型 . 用 介 运 o d rs i 运 C S S oi O MO M t n运 动 仿 真 软 件 对 弹 齿 滚 筒捡 拾 器机 构 进 行 了运 动 仿 真 . 出 了弹 齿 滚 筒捡 拾 器 弹齿 尖 的运 动 o 得
引 言
运动机构的虚拟仿真已成为机械设计创新的 有力工具 , 运用虚拟仿真可以提高产品设计的直观
性和生 动性 , 强产 品的竞争 力 。Sl Wok 软件 增 oi rs d 是一个优 秀的三维设 计软件 , 包括零 件设计 、 配 、 装 仿真等功 能 。使用 此软件 , 可以根据设 计者 的设计 思路绘 制 零件 草 图 , 出 3 得 D实体 , 并且 可 以根据 尺寸驱 动功 能修 改 实体 ,根 据机 构 的实 际装 配关
和力学曲线, 曲线进 行 了一定的推 理分析 , 对 为进一步的 弹齿滚 筒捡拾 器外形尺 寸和机构参数 的改进奠 定了
理 论 基础 。
关键词 :C S S oi ;弹齿滚 筒拉拾器 : O MO M t n o 仿真分析 中图分类号 :2 35 ¥2 . 文献标识码 : A 文章编号 :6 3 3 4 ( 1)8 0 3 — 3 17 — 22 00 — 0 7 0 1 0
系. 组装 成装 配体 。C S S t n是 一个完 全 穿 O MO Moi o
弹齿 捡拾 滚 筒进 行实 体 三维设 计 和机 构运 动仿 真
分析 , 为以后的开发和使用提供了理论支持。
1 弹齿滚筒捡拾器的建模
弹齿滚筒捡 拾器通 常是 由滚筒 、 护板 、 弹齿 、 主 轴 、 轮盘、 滚 管轴 、 轮 和机架 组成 , 滚 弹齿滚 筒捡 拾 器如 图 1 所示 : 转轴 3在皮带 轮 的带 动下匀 速转 旋