相控阵天线相位中心的时域全波仿真
相控阵天线波束跃度仿真分析及算法优化
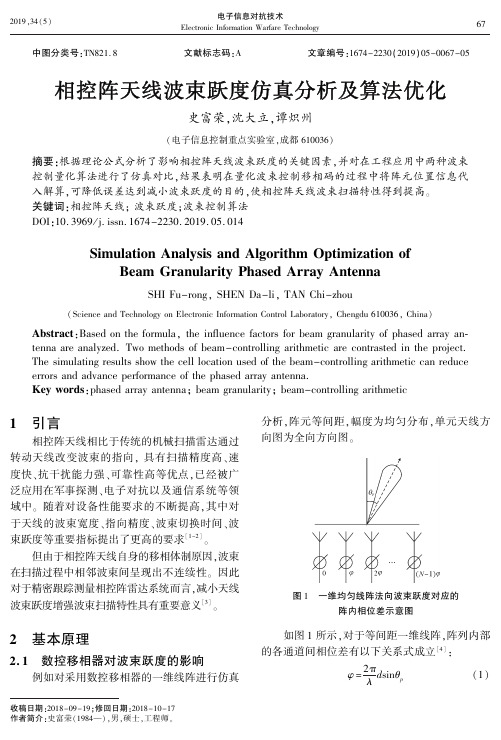
2
…
N
0 度分布
0
0
0
0
驻兹P 指向下
0
的分布
驻渍
… (N-1)驻渍
2驻兹P指向下 0 的分布
2驻渍
… 2(N-1) 驻渍
…
…
…
…
…
p驻兹P指向下 0 的分布
p驻渍
… (N-1)p驻渍
波束半功率点宽度 兹B表示为:
兹B
抑co1s兹p
·0
. 88姿 Nd
(6)
则得到:
驻兹p 兹B
抑1
.
136 2K
N
(7)
但由于相控阵天线自身的移相体制原因,波束 在扫描过程中相邻波束间呈现出不连续性。 因此 对于精密跟踪测量相控阵雷达系统而言,减小天线 波束跃度增强波束扫描特性具有重要意义[3] 。
基于无源侦察幅度的相控阵雷达工作模式仿真
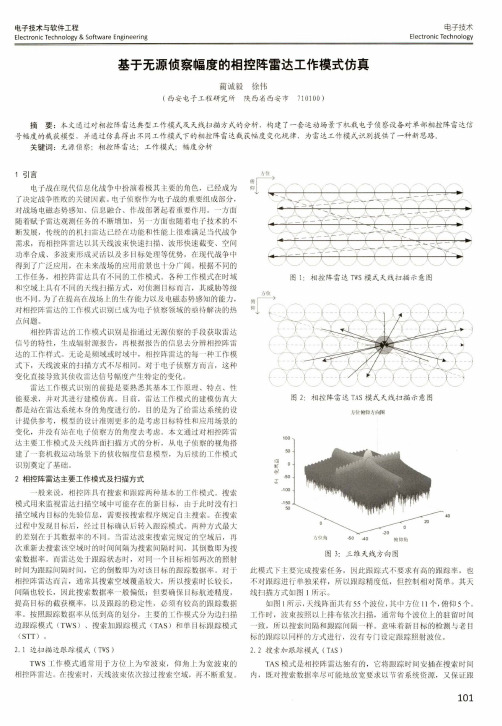
电子技术与软件工程Electronic Technology & Software Engineering电子技术Electronic Technology基于无源侦察幅度的相控阵雷达工作模式仿真蔺诚毅徐伟(西安电子工程研究所陕西省西安市710100)摘要:本文通过对相控阵雷达典型工作模式及天线扫描方式的分析,构建了一套运动场景下机载电子侦察设备对单部相控阵雷达信 号幅度的截获模型,并通过仿真得出不同工作模式下的相控阵雷达截获幅度变化规律,为雷达工作模式识别提供了一种新思路。
关键词:无源侦察;相控阵雷达;工作模式;幅度分析1引言电子战在现代信息化战争中扮演着极其主要的角色,已经成为了决定战争胜败的关键因素。
电子侦察作为电子战的重要组成部分,对战场电磁态势感知、信息融合、作战部署起着重要作用。
一方面随着赋予雷达观测任务的不断增加,另一方面也随着电子技术的不断发展,传统的的机扫雷达己经在功能和性能上很难满足当代战争需求,而相控阵雷达以其天线波束快速扫描、波形快速截变、空间功率合成、多波束形成灵活以及多目标处理等优势,在现代战争中得到了广泛应用,在未来战场的应用前景也十分广阔。
根据不同的工作任务,相控阵雷达具有不同的工作模式。
各种工作模式在时域和空域上具有不同的天线扫描方式,对侦测目标而言,其威胁等级也不同。
为了在提高在战场上的生存能力以及电磁态势感知的能力,对相控阵雷达的工作模式识别己成为电子侦察领域的亟待解决的热点问题。
相控阵雷达的工作模式识别是指通过无源侦察的手段获取雷达信号的特性,生成辐射源报告,再根据报告的信息去分辨相控阵雷达的工作样式。
无论是频域或时域中,相控阵雷达的每一种工作模式下,天线波束的扫描方式不尽相同。
对于电子侦察方而言,这种变化直接导致其侦收雷达信号幅度产生特定的变化。
雷达工作模式识别的前提是要熟悉其基本工作原理、特点、性能要求,并对其进行建模仿真。
目前,雷达工作模式的建模仿真大都是站在雷达系统本身的角度进行的,目的是为了给雷达系统的设 计提供参考,模型的设计准则更多的是考虑目标特性和应用场景的 变化,并没有站在电子侦察方的角度去考虑。
相控阵天线相位中心的时域全波仿真

[ ] en+1/2
=
en−1/ 2
+
Δt
M
−1 ε
C~ M−μ1bn
+
jnS
bn+1 = bn − Δt C en+1/ 2
在满足 Courant-Friedrichs-Levy (CFL)稳定
性 条 件 Δt ≤
εμ
⎜⎛ ⎝
1 Δx
⎟⎞ 2 ⎠
+
⎜⎜⎝⎛
1 Δy
⎟⎟⎠⎞ 2
+
⎜⎛ ⎝
1 Δz
⎟⎞ 2 ⎠
相控阵天线相位中心的时域全波仿真
王红丽 张敏
(同济大学 电子信息与工程学院)
摘要:采用有限积分技术对有源相控阵进行全波时域仿真,计算其相中心等远场特性。同
时,在 CST 微波工作室®中利用后处理命令对天线阵进行仿真,当天线阵在较小的角度范围
内进行扫描时,全波仿真和后处理合成所得结果都很准确。在较大的扫描角时,采用后处理
坐标变换前
坐标变换后
图 3 625 单元天线阵的 3D 方向图
对于 625 单元有源相控阵,其单元天线 的主瓣方向为+Z 方向,相位中心为(-1.04, -1.55,4.33),均方差为 1.09。当主瓣方向 旋转到 30 度位置时,坐标变换前后所得 3 维方向图如图 3 所示。而且,坐标变换前计 算 所 得 相 位 中 心 为 ( 929.70 , -315.95 , -9559.35),均方差 Sigma 的值为 27575.40, 该相位中心是以 Z 轴范围内的电场分量为基 准进行计算的,因而并不是我们需要的主瓣 范围内的相位中心。坐标变换后计算所得的 原坐标系下的相位中心为(14.31,13.32, 34.34),均方差 Sigma 的值为 11.45。可见, 在相控阵的相位中心计算过程中,坐标变换 是非常必要的,而且坐标的变换并不改变其 他的远场信息。
中波圆形直立相控阵天线仿真设计

中波圆形直立相控阵天线仿真设计杨意磊;柳超;吴华宁;何铭嘉;向梅【摘要】Aiming at the problem that the propagation distance of ground wave radiated by mid-wave vertical antenna can not suit the long-distance communication.The phased array is proposed to improve the gain of ground wave radiated by mid-wave vertical antenna.The model of mid-wave vertical antenna circular phased array, with eight elements and by using 76 m vertical antenna as element antenna, is realized by electromagnetic simulation software FEKO and MATLAB.On this basis, the modeling and simulation of 25 m, 50 m,75 m, 100 m, 125 m cicular-phased arrays is further done, and get their patterns and gains acquire. The influence of different radiuses on the pattern and gain of 8-yuan medium-wave vertical phased-array antenna is analyzed.%针对中波天线在地波传播过程中传播距离较短、衰减较大的问题,提出采用相控阵的组阵方式来提高中波天线的地波辐射增益.通过电磁仿真软件FEKO和MATLAB软件的混合编程,以76 m直立天线作为单元天线,成功实现了八元中波圆形相控阵的建模仿真.在此基础上,进一步建模仿真了25 m、50 m、75 m、100 m、125 m等五种不同半径的圆形阵、方向图和组阵增益,同时分析了不同半径对八元中波直立相控阵天线方向图和增益的影响.【期刊名称】《通信技术》【年(卷),期】2017(050)006【总页数】5页(P1170-1174)【关键词】中波天线;FEKO;MATLAB;圆形相控阵【作者】杨意磊;柳超;吴华宁;何铭嘉;向梅【作者单位】海军工程大学电子工程学院,湖北武汉 430033;海军工程大学电子工程学院,湖北武汉 430033;海军工程大学电子工程学院,湖北武汉 430033;海军工程大学理学院,湖北武汉 430033;94826部队作战指挥中心,上海 200000【正文语种】中文【中图分类】TN822中波通信通常是指利用频率为0.3~3 MHz的电磁波进行的无线通信。
全相位算法在相控阵天线幅相校正测量中的应用
全相位算法在相控阵天线幅相校正测量中的应用李法鑫;杜娟;姚飞娟;刘星;庞浩【摘要】相控阵天线波束的精确指向对各阵元通道幅相一致性提出了很高的要求,在实际的相控阵天线系统中,各阵元通道幅度和相位不可能完全保持一致,需要对阵列通道幅相误差进行实时地监测和校正.阵列单元校正的本质是对通道幅相误差的精确测量或估计,在现有幅相测量方法的基础上,提出一种全相位时移相位差算法.该算法需对存在时移关系的两输入序列分别进行全相位FFT,直接取主谱线的相位值无需校正即可得到输入信号的中间点相位信息,利用两序列主谱线的相位差求解信号的幅度值.由于全相位FFT具有“相位不变性”,此方法能够很好地抑制频谱泄漏.仿真结果表明,该方法可有效避免第一类相位差法在不同步采样时误差较大的情形,测量结果明显优于第一类相位差法.【期刊名称】《科学技术与工程》【年(卷),期】2015(015)004【总页数】5页(P114-118)【关键词】全相位FFT;幅相测量;相控阵天线【作者】李法鑫;杜娟;姚飞娟;刘星;庞浩【作者单位】中国洛阳电子装备试验中心卫星导航实验室,洛阳471000;中国洛阳电子装备试验中心卫星导航实验室,洛阳471000;中国洛阳电子装备试验中心卫星导航实验室,洛阳471000;中国洛阳电子装备试验中心卫星导航实验室,洛阳471000;哈尔滨工业大学电子与信息工程学院,哈尔滨150001【正文语种】中文【中图分类】TP29相控阵天线的波束能快速灵活扫描,可以实现多波束工作,波束形状可重构,并且具备实现自适应抗干扰功能等,这些特点使得相控阵天线迅速发展并广泛应用于机载、舰载、星载等领域。
然而,相控阵天线波束的精确指向需要对各阵列单元幅度和相位的精确控制,对阵元各通道幅相一致性提出了很高的要求[1]。
实际的相控阵天线系统中,由于存在着随机的幅度与相位误差,相控阵各单元激励电流的幅度和相位不可能完全保持一致[2]。
虽然相控阵天线研制过程中的幅相误差可借助一定的辅助设备精确测量和校准,但是相控阵天线在工作时,由于组件老化、热变形而造成各通道的幅相误差[3],也需要实时监测和校正。
全空域相控阵波束形成仿真发展现状

全空域相控阵波束形成仿真是一种重要的研究方向,它在军事、航空航天、通信等领域具有重要的应用价值。
本文将从全空域相控阵波束形成仿真的定义、发展现状、关键技术、应用前景等方面进行介绍。
一、全空域相控阵波束形成仿真的定义全空域相控阵波束形成仿真是指利用计算机仿真技术,对全空域相控阵系统进行模拟,包括雷达、通信、导航等系统,从而实现对波束形成性能、天线阵列结构、信号处理算法等方面的分析和评估。
该仿真技术能够为全空域相控阵系统的设计、优化和性能验证提供重要依据。
二、全空域相控阵波束形成仿真的发展现状当前,全空域相控阵波束形成仿真技术已经取得了一系列研究进展,主要包括以下几个方面:1. 理论研究:国内外学者对全空域相控阵波束形成算法进行了深入研究,包括波束形成理论、自适应波束形成算法、多波束形成技术等方面,形成了一系列理论成果。
2. 系统建模:针对不同类型的全空域相控阵系统,研究人员建立了相应的仿真模型,包括天线阵列、前端硬件、信号处理算法等方面,为仿真研究提供了基础。
3. 算法仿真:通过软件仿真评台,研究人员对全空域相控阵系统的波束形成算法进行了大量仿真验证,验证了算法的性能和稳定性。
4. 实验验证:一些研究团队结合实际系统,进行了全空域相控阵波束形成仿真实验验证,取得了一定的成果。
三、全空域相控阵波束形成仿真的关键技术在全空域相控阵波束形成仿真研究中,存在一些关键技术需要解决,包括:1. 天线阵列建模:针对不同类型的天线阵列,如均匀线阵、均匀面阵、非均匀阵列等,需要建立相应的仿真模型,包括天线元件特性、空间布局、阵列结构等。
2. 信号处理算法仿真:自适应波束形成、多波束形成、抗干扰技术等算法的仿真验证是全空域相控阵波束形成仿真的重要内容,需要考虑到信号处理的复杂性和实时性。
3. 环境仿真:全空域相控阵系统在不同环境条件下性能会有所变化,因此环境仿真也是关键技术之一,包括大气、地形、电磁干扰等影响因素的仿真。
阵列天线相位中心的计算与分析

阵列天线相位中心的计算与分析陈曦;傅光;龚书喜;阎亚丽;栗曦【摘要】为了得到阵列天线的相位中心,本文从阵列天线的场表达式推导出阵列天线远场区的相位方向图与选取的参考点之间的关系式.并根据该关系式,应用最小二乘法得出了求解阵列天线的视在相心的方法.结合得出的结论,对一个矩形平面阵进行了仿真实验,实验证实了本方法的有效性.同时发现,阵列单元在不同角域内对应的视在相心不同,并且阵列天线的视在相心主要取决于阵列单元在相应角域内的视在相心.【期刊名称】《电波科学学报》【年(卷),期】2010(025)002【总页数】6页(P330-335)【关键词】阵列天线;相位中心;视在相心;主瓣宽度【作者】陈曦;傅光;龚书喜;阎亚丽;栗曦【作者单位】西安电子科技大学天线与微波技术国家重点实验室,陕西西安,710071;西安电子科技大学天线与微波技术国家重点实验室,陕西西安,710071;西安电子科技大学天线与微波技术国家重点实验室,陕西西安,710071;西安电子科技大学天线与微波技术国家重点实验室,陕西西安,710071;西安电子科技大学天线与微波技术国家重点实验室,陕西西安,710071【正文语种】中文【中图分类】TN8211.引言目前,相控阵天线已经被广泛的应用于各种雷达系统,并且随着对雷达系统的跟踪、定位精度的要求越来越高,在VHF及以下频段,单靠波束幅度特性进行搜索定位已不能满足要求,必须以天线阵的相位中心为基准进行精确定位和测量[1]。
对于寻找天线相位中心的研究,前人得到了一些有效的方法,但大多数都是针对单天线的研究[2-5],像文献[5]中的研究,作者通过多次尝试,反复测量,最终找到相位中心,这对于小体积天线是可行的,但对于数个波长尺寸的阵列天线,则希望减少调整的次数。
目前,国内关于阵列天线相位中心的研究甚少,文献[6]中曾有提及,作者在研究对数周期天线的相位中心时,对直线阵的相位中心存在的条件进行了研究,得到一些有意义的结论。
机载相控阵天线近场测试补偿算法的研究及仿真

机载相控阵天线近场测试补偿算法的研究及仿真机载相控阵天线近场测试补偿算法的研究及仿真摘要随着雷达技术的快速发展,雷达天线测试技术也应不断满足多种新型雷达天线的测试要求,不仅要提高测试精度,随着雷达天线的复杂化,对测试系统的计算能力也提出了更高的挑战。
传统的雷达天线测试技术主要是远场天线测试技术,通过远场测试分析雷达的辐射特性。
虽然远场测试能够反映出雷达天线的基本性能,但也有许多方面的不足,很容易受到外界环境的影响,不能够准确地反映出雷达天线的特性参数等。
所以对新一代雷达天线测试技术的研究显得越发重要。
新一代天线测试技术是以近场测量技术为代表,近场测量技术具有测试精度高、抗干扰能力强、计算分析能力强等特点,这种天线近场测试系统已经广泛应用于多种雷达天线的测试过程。
与此同时,具有能够测量远距离、较强抗干扰能力等特点的相控阵雷达技术慢慢地开始引导雷达技术发展并成为其发展的主要方向。
因此现在对相控阵雷达天线的研制与设计也提出了更高的要求。
本课题所集中处理的问题具体包括,先由以近场-远场变换为理论依据,通过近场电场来求解出其理论的远场电场表达式;然后采取偶极子阵列仿真模型,获取其某一平面的远场电场的仿真表达式,进而将仿真运行与理论运行得出的远场方向图做对比,看是否完全重合,若存在差异,分析可能造成误差的主要因素;最后,分析造成近场测试过程中误差的因素对测量效果的影响,并讨论误差范围,进而由误差补偿方法对误差进行修正。
关键词:相控阵雷达,天线近场测试,近场-远场变换,偶极子阵列IThe research and simulation of the near-field radar antennameasurementAbstractWith the rapid development of radar technology,the radar antenna testing techniques should also be evolved to meet a variety of radar antennas.Such a testing technology not only should be improved precision accuracy,but also could be developed to meet the challenges of the calculation capability of the testing system,because of the complication of the radar antenna.The traditional radar antenna testing technology is mainly far-field antenna test technology that achieved by testing and analyzing the radiation characteristics of radar in the far-field.although the far-field test that reflects much fundamental in the basic performance of the radar antenna, but there has disadvantages in several aspects,the study of a new generation of radar antenna testing technology becomes more and more important .A new generation of testing technology radar antenna is based on the near-file test technology,the near-file test technology has the advantages of high precision,strong anti-interference ability ,excellent calculation and analysis ability,and the near-file test technology has been widely used in a variety of radar antenna testing process.In this paper,the solution of the problem is to calculate the limit far-field value through near-field electric field of the radiation of the electronic equipment or system and the near-field to far-field transformation,and to test and analysis the error.Finally,the error accuracy problem of the near-field measurement technology is analyzed.Key words: Phased-array radar ; Near-field antenna measurement ; Near-field to Far-field transformation;dipole arrayII目录论文总页数:23页摘要------------------------------------------------------------------------------------------------ II Abstract -------------------------------------------------------------------------------------------- II 第一章引言 -------------------------------------------------------------------------------------- 11.1 研究的背景 ---------------------------------------------------------------------------- 11.2 研究的意义 ---------------------------------------------------------------------------- 21.3 研究状况的分析 ---------------------------------------------------------------------- 31.4 研究的主要成果 ---------------------------------------------------------------------- 31.5 论文的结构 ---------------------------------------------------------------------------- 4第二章天线近场测试的原理 ----------------------------------------------------------------- 52.1 天线近场测试的论述 ---------------------------------------------------------------- 52.2 平面波展开原理 ---------------------------------------------------------------------- 62.3近场-远场外推变换 ------------------------------------------------------------------- 9第三章相控阵雷达天线的原理 -------------------------------------------------------------- 93.1 相控阵雷达天线的论述 ------------------------------------------------------------- 93.2 相控阵天线的方向图函数 -------------------------------------------------------- 10 第四章机载相控阵天线近场测试误差仿真及分析------------------------------------ 144.1 采样间隔对结果的影响 ----------------------------------------------------------- 144.2 幅相测量误差对结果的影响 ----------------------------------------------------- 164.3 远场补偿方法 ----------------------------------------------------------------------- 184.3.1 根据阵元相移量算法找出频率关系--------------------------------------- 184.3.2 理论上的补偿算法 ------------------------------------------------------------ 194.3.3 补偿算法的仿真 --------------------------------------------------------------- 19 第五章总结 ------------------------------------------------------------ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。