自动控制原理李晓秀版(习题参考.答案)

《自动控制原理(第2版)》李晓秀
第1章 习题答案
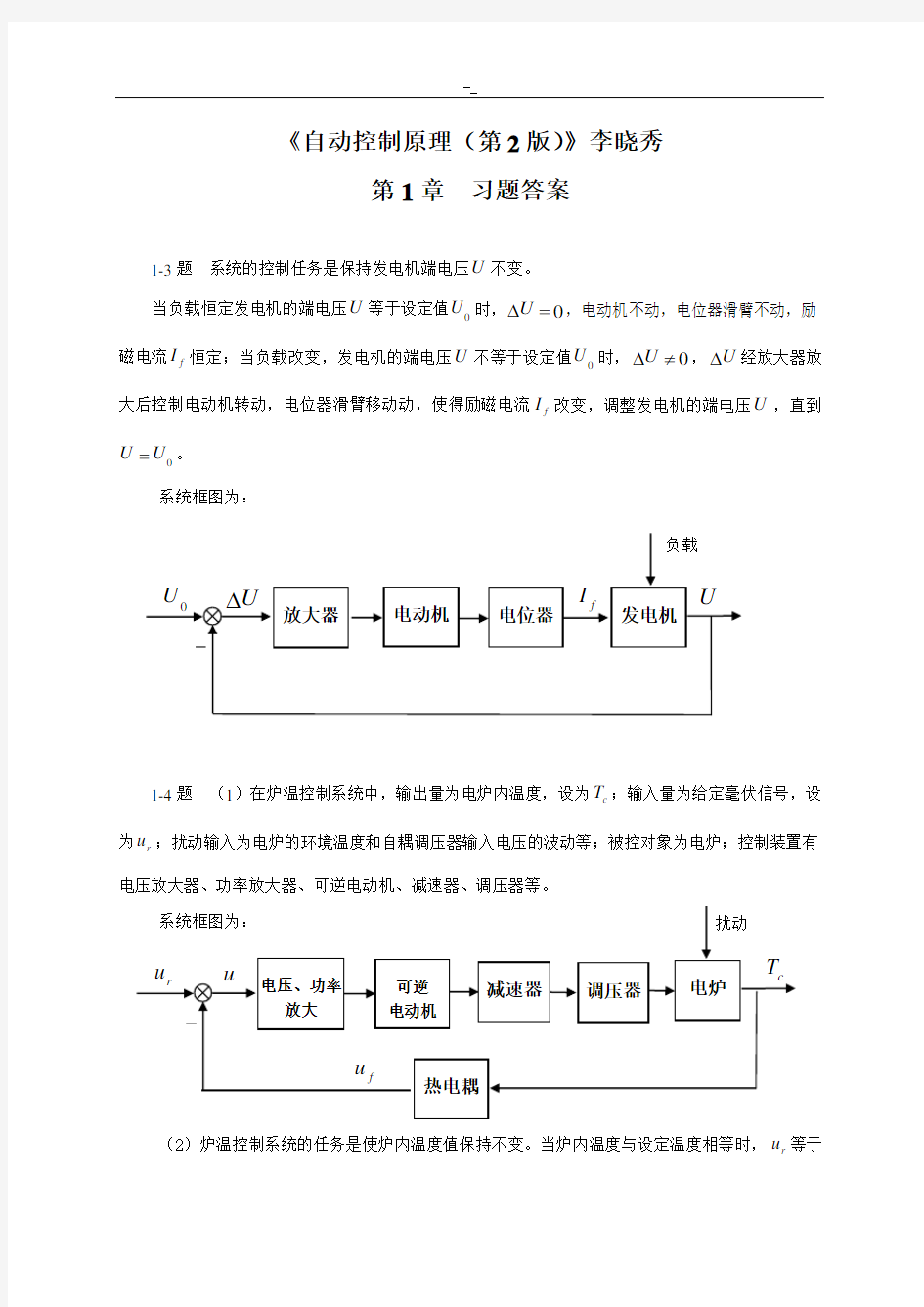
1-3题 系统的控制任务是保持发电机端电压U 不变。
当负载恒定发电机的端电压U 等于设定值0U 时,0U ?=,电动机不动,电位器滑臂不动,励磁电流f I 恒定;当负载改变,发电机的端电压U 不等于设定值0U 时,0U ?≠,U ?经放大器放大后控制电动机转动,电位器滑臂移动动,使得励磁电流f I 改变,调整发电机的端电压U ,直到
0U U =。
系统框图为:
1-4题 (1)在炉温控制系统中,输出量为电炉内温度,设为c T ;输入量为给定毫伏信号,设为r u ;扰动输入为电炉的环境温度和自耦调压器输入电压的波动等;被控对象为电炉;控制装置有电压放大器、功率放大器、可逆电动机、减速器、调压器等。
(2)炉温控制系统的任务是使炉内温度值保持不变。当炉内温度与设定温度相等时,r u 等于
f u ,即0u =,可逆电动机电枢电压为0,电动机不转动,调压器滑臂不动,炉温温度不改变。
若实际温度小于给定温度,0r f u u u =->,经放大后控制可逆电动机转动使调压器滑臂上移,
使加热器电压增大,调高炉温;若实际温度大于给定温度,0r f u u u =-<,经放大后控制可逆电动机转动使调压器滑臂下移,使加热器电压减小,降低炉温。使得f u 和r u 之间的偏差减小甚至消除,实现了温度的自动控制。
1-5题 (1) 在水位控制系统中,输出量为水位高度H ;输入量为给定电压g u ;扰动输入为出水量等。
(2)当实际水位高度H 为设定高度时,与受浮球控制的电位器滑臂位置对应的f u 与给定电压g u 相等,电动机不转动,进水阀门维持不变。若水位下降,电位器滑臂上移,f u 增大,偏差
0g f u u u ?=-<,经放大后控制电动机逆转调大进水阀门,加大进水量使水位升高;若水位升高
降,电位器滑臂下移,f u 减小,偏差0g f u u u ?=->,经放大后控制电动机正转调小进水阀门,减小进水量使水位下降,实现了水位的自动控制。
第2章 习题答案
2-1题
a) 122()()
()()()c r c r du t du t R C R C u t R C u t dt dt
++=+ b)
211()()111
()()()c r c r du t du t u t u t dt R C R C dt R C
++=+ 2-2题
1.11
2.65 1.1
3.030.25dF
y y dy
=?==
3.03F y ?=? 2-3题
011
0.0020.0022.2523
dQ dH =?=?= 1
10.0030.002( 2.25)0.00150.0023
3
Q H H =+?-=+? 2-4题
a) 2
12
1()11()()1c r fs
X s k X s fs k k =++
b) 1212
122121
(
1)(1)
()()(1)(1)c r f f
s s X s k k f f f X s s s s
k k k ++=+++ 2-5题
a)
2121
121212
()()()c r U s R C C s C U s R R C C s C C +=+++ b)
2
2
11212
()()()c r U s Ls R U s R LCs R R C L s R R +=++++ c) 21122112232
11212122112212()()1()()()1c r U s R C R C s R C R C s U s R LC C s R R C C LC s R C R C R C s +++=++++++ d) 21122112221212112212()()1()()1
c r U s R C R C s R C R C s U s R R C C s R C R C R C s +++=
++++
2-6题 a)
11002200101()(1)(1)
()2c r U s R C s R C s U s R C C s R C s ++=-+ b)
()
1()
c r U s RCs U s =+
c) 110020121()(1)(1)
()()1
c r U s R C s R C s R U s R R R C s ++=-++ 2-7题 a)
12212(1)()
()1G G C s R s G G G -=-+ b)
12
23
()()1G G C s R s G G -=- c)
123412121232
()
()1G G G C s G R s G G H G H G G H =++++ 2-8题
解 由微分方程组建立系统结构图为
传递函数
23412342234331234345
()
()(1)K K K s K K K K C s R s Ts K K K K T s K K K K K K K K ττ+=++++++ 2-9题
解 由有源电路建立系统结构图为
2132()(1)
()(1)(1)(1)
c r U s K T s U s T s T s K T s +=++++ 其中,3
1012223332
02
,,,R K T R C T R C T R C R C ==== 2-10题
12323
2123
()()1G G G G G C s R s G G G G -=++
3232123
()()1G G G C s N s G G G G --=++ 2-11题
作信号流图略
a)
112233441221111112212
()()1P
P P P G G G G G H C s R s G H G G H G H ?+?+?+?++-==?+++ b)
12322112211223312311222233
(1)()()1G G G G H P
P C s R s G H G H G H G G H G H G H G H G H +-?+?==
?+-++--
11223344
34514534251425134534561345351545
())
()(1)(1)
1P
P P P C s c R s G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G G ?+?+?+?=?
++-+-=
++--++--+
d)
1122334412121212
2()()13P
P P P G G G G C s R s G G G G ?+?+?+?-++==?-++ 2-12 题
作信号流图略
123341111221132123121132(1)()()1G G G G G G H P
P C s R s G H G H G G G H H G H G H ++?+?==
?++++ 32431211221132123121132
1()()1G H G G H H P
P E s R s G H G H G G G H H G H G H +-?+?==
?++++
2-13 题
112233
123434516321232123433453163113216332
()()(1)
1P
P P C s R s G G G G G G G G G G H G H G H G G G G H G G G H G G H G H G H G G H G H ?+?+?=?
+++=
+++++++
2-14 题
a)
1122()50(10.5)20(110)29515.13()11020.5100.520.519.5P P C s R s ?+?+++====?++++?+? b)
1122()(1)
()1P P C s abcd ed bg R s af bg ch efgh afch
?+?+-==
?----+ c)
11223344()()P
P P P C s R s ?+?+?+?=?
21426334512345647345641864718648121422163426342186442718644281214263
1G H G H G H G G G G G G G G G H G G G G G H G G G H G H G G H G H G H G H G H G H G H G H G H G G G H G H G H G G H G H G H G H G H G H ?=+++++++
--++++--+ 1123456P G G G G G G = 11?= 273456P G G G G G = 21?= 3186P G G G = 1421G H ?=+ 47186P G G G G =- 4421G H ?=+
第3章 习题答案
3-1题 (1) 稳定
(2) 稳定
(3) 不稳定,2个正实部根 (4) 稳定 (5) 临界稳定
3-2题 (1) 0 < K < 3
(2) 0 < K < 1/2
3-3题 a) 0.1τ> b) 0.85H K > 3-4题 不具有1=σ的稳定裕度
3-5题 系统响应持续振荡,即系统临界稳定时 2665,
4.062rad/s 4
K ω==
3-6题 2,0.75K a ==
3-7题 00.9,10H K K ==
3-8题 0.25min,
10 2.5(C)ss T e T ===
3-9题 (1) 闭环传递函数 2()36()1336
C s R s s s =++,单位脉冲响应 49()7.27.2t t
c t e e --=- (2) 6,
1.08n ωζ==
3-10题 (1) 10()0.5(1)t
c t e -=-
(2)
2()8()2 3.2
C s R s s s =++,() 2.5[1 1.2sin(1.4855.9)]t
c t e t -=-+ 3-11题 0.31,16.5n ζω== ,
2() 1.8272.3
()10.23272.3
C s R s s s ?=++ 3.12题 0.33, 2.27n ζω==,211/0.75 1.33,
3.87, 1.5K K a ====
3-13题 (1) 0.24, 2.12n ζω==,46%p σ=,6s t s =%)5(±=?8s t s =(2%)?=±
(2) 0.5,1n ζω==,16.3%p σ=,6s t s =%)5(±=?8s t s =(2%)?=± (3) 1.25,0.4n ζω==,0p σ=,15s t s =%)5(±=?20s t s =(2%)?=±
3-14题 0.517, 1.45n ζω== 0.67, 1.4T K == 3-15题 (1) 0.225τ=
(2) 0.59, 1.7n ζω== 2
2.89,0.69n K ωτ===
3-16题
0.707n ωζ== 4.3%p σ= 3s t s =%)5(±=?4s t s =(2%)?=±
3-17题 (1) 50,0,0,
p v p ss K K K e ====∞
(2) 7,,0,
8
p v p ss K K K e =∞===∞ (3) ,,5,
0.4p v p ss K K K e =∞=∞==
3-18题 40 < K < 101 3-19题 K 1=125, A > 125/20 3-20题 (1) 121
21
ss e K K K =
+ (2) 应该提高1()G s 部分的放大系数。 3-21题 (1)略 (2) 3
1
ss a e a =
3-22题 (1) 无内反馈s τ时,系统不稳定,内反馈s τ存在时, 只要取0.9τ>系统稳定。 (2) 1105
ss e τ
+=
,内反馈s τ的存在使稳态误差增大。
3-23题 32,0.1875K τ==,
第4章 习题答案
4-1略
4-2)0,2(j +-在根轨迹上,)1,0(j +和)2,3(j +-不在根轨迹上。
4-3(1)实轴上的两个会合点为63.0-和59.3-,两个分离点为5.2-和28.7-; (2)实轴上的分离点为6.0-;渐进线:75.1-=-A σ,2
π
θ±= ;
(3)实轴上的分离点为31
-
,根轨迹与虚轴交点为:1j ± , 渐进线:32-=-A σ,ππ
θ,3
±= ;
4-42
22)10(=+ωσ,圆方程:半径10,圆心)0,0(。
4-5(1)分离点为59.0-,会合点为41.3- ; (2)22,3j s K r ±-== 。
4-6 分离点为110.83,0.34r s K ==;224.38,11.66r s K =-=
根轨迹与虚轴交点为:2,2r j K ±= (1)211.66r K << (2)2r K > 稳定 。
4-7 (1)实轴上的分离点为845.0-,根轨迹与虚轴交点为:22j ± , 渐进线:2-=-A σ,ππ
θ,3
±= ;
(2)481.3< (3)s rad K r /83.2,48==ω ; (4)34.8=r K ; 闭环传递函数为: ) 16.167.0)(16.167.0)(56.4(34 .8j s j s s -++++ 。 4-8(1)稳定范围是30< (2)当53.0,58.033.0,5.02,1=±-==K j s 时ξ。 可近似为二阶系统:436 .066.0436 .0)(2 ++= s s s G ,s t s 1.9%,3.16%==σ 。 4-9(1)实轴上的分离点为13.21-;根轨迹与虚轴交点为:71.70j ± ; 渐进线:50-=-A σ,ππ θ,3 ±= ; (2)临界稳定的开环增益为150; (3)开环增益为62.9。 4-10 分离点为732.3-;临界阻尼时46.5=r K ; 出射角: 145±; 4-11 略; 4-12 特征方程为2 101010 H K s s s + =++ , 开环零极点:0,12,.35.012.1=±-=z j p ; 分离点为:732.3-=s 。 4-13 出射角为 60180±;入射角为 135±;与虚轴交点为2j ±,1K =; 4-14 由根轨迹通过)07.165.0(j +-求出668.01=T ,此时开环传递函数为) 2)(1() 45.1(68.6+++s s s s K ; 4-15(1)19==a a 或时有一个分离点; (2)19<>a a 或时有二个分离点。 4-16 2 ) 1() 4()(++= s s s K s G r 分离点为:354.0-=s ,04.0=r K ,292.13=s ; 虚轴交点:2±=ω; 4-17 实轴上的分离点为634.0-,会合点为336.2-; 增益对阻尼特性的影响:从根轨迹图可以看出,对于任意0>K ,闭环系统都是稳定的,但阻尼状况不同。在增益较小时)0718.00(< Ts G s s s s '= +++ (1)渐进线:5.1-=-A σ,2 π θ± =;根轨迹与虚轴交点为:828.2j ±; 出射角:1140.1p θ=,2140.1p θ=-; (2)稳定范围:4 1 >T 。 第5章 习题答案 5-1题 (1) () 1.58sin(218.4)c t t =- (2) ()0.82sin(20.5)c t t =+ (3) () 1.58cos(263.4)c t t =- (4) ()0.82sin(20.35) 1.58cos(263.4)c t t t =+-- 5-2题 (1) (0)(0)90G j H j =∞∠-,lim ()()0270G j H j ωωω→∞ =∠-,穿越负实轴,穿越频率 0.707rad/s,ω=幅值2()3A ω=。 (2) (0)(0)180G j H j =∞∠-,lim ()()0360G j H j ωωω→∞ =∠-,不穿越负实轴 (3) (0)(0)270G j H j =∞∠-,lim ()()090G j H j ωωω→∞ =∠-,穿越负实轴,穿越频率 1.4rad/s,ω=幅值()1A ω=。 (4) (0)(0)180G j H j =∞∠-,lim ()()090G j H j ωωω→∞ =∠-,不穿越负实轴 5-4题 a) 10()()0.11G s H s s =+ b) 0.1()()0.021 s G s H s s =+ c) 100()()(1001)(0.051)G s H s s s s = ++ d) 50 ()()(0.011) G s H s s s =+ e) 2210()()0.761747747G s H s s s = ++ f) 2 2100 ()()0.6(1)5050G s H s s s s =++ 5-5题 (1) 1 1223 1(1) ()(),1 ( 1) K s G s H s K s s ωωωω+= =+式中 (2) 画出对应的对数相频特性曲线和奈氏图(略)。 5-6题 1 31.62( 1)0.1()()1111(1)(1)(1)(1)0.316 4.21742.17100 s G s H s s s s s +=++++ 5-7题 a)不稳定 b) 稳定 c) 不稳定 d) 稳定 e) 稳定 f) 稳定 g) 稳定 h) 不稳定 5-8题 (1) 0P =,2ν=, 穿越负实轴,穿越频率0.35rad/s,ω= 幅值()10.7A ω=。开环奈氏图如图。 1N =-,系统不稳定 (2) 1P =,1ν= 穿越负实轴频率ω= 幅值()2A ω=。开环奈氏图如图。 10.50.52 P N N N +-=-=-== , 系统稳定 (3) 0P =,1ν=,(0)(0)90G j H j + + =∞∠-,lim ()()0270G j H j ωωω→∞ =∠-,穿越负实轴 频率 4.47rad/s,ω=幅值()8.3A ω=。开环奈氏图略。 N (4)0P =,2ν= 0ω>时不穿越负实轴,开环奈氏图如图。 0N =,系统稳定 =ω=ω 5-9题 010,2510000K K <<<<或 5-10题 (1) 穿越负实轴0.458rad/s,g ω=()29.76g A K ω=,稳定条件00.0336K << 穿越负实轴 3.16rad/s,g ω=()0.1g A K ω=,稳定条件10K > 5-11题 (1) 由Bode 图,得 4.47rad/s c ω=,()?ω穿越-180 4.47rad/s,g ω=系统临界稳定 (2) 由Bode 图,得 2.23rad/s c ω=,()?ω不穿越-180,系统稳定 (3) 由Bode 图,得 1.41rad/s c ω=,()?ω穿越-1809rad/s,g ω=系统稳定 (4) 由Bode 图,得 2rad/s c ω=,()?ω不穿越-180,系统稳定 5.12题 (1) 系统稳定, 6.32,1 7.2c ωγ==,44.7,34g h dB ω== (2) 系统不稳定, 3.42,77.3c ωγ==-,0.86,33.4g h dB ω==- (3) 系统稳定, 4.47,35.6c ωγ= = 5-13题 (1) 1,39.3c ωγ==, 3.16,20g h dB ω== (2) 要求系统相位裕量为45时,0.85c ω=,0.85K = (3) 要求系统幅值裕量为20dB ,1K = 5-14题 1.03K =,或 9.6K = 5-15题 0.84a = 5-16题 0.456, 2.2n ζω==, 43.3γ= 3-17题 3.67c ω=,52.6γ = 题5-8 (4)图 第6章 习题参考解答 6-1 题解 (1) K K C e V Max ss == ≥6(1/秒) ) 15.0)(12.0(6 )(++= s s s s G 解得 026 3.46c ω=?=,0 3.8o γ=- 0 3.2g ω= 020lg 1()h dB =-,系统不稳定 (2)超前校正后系统开环传递函数为 G s G s s s s s s c ()()(.) (.)(.)(.) = ++++60410081021051 作校正后系统对数幅频特性曲线如图所示,由图得: 4.8c ω=,22.5o γ= 7.3g ω=, 2.371h =, 20lg 7.5h dB =。 说明超前校正可以增加相角裕度,从而减小超调量,提高系统稳定性;同时增大了截止频率,缩短调节时间,提高了系统的快速性。 6-2 题解: 超前校正网络传递函数为 s s s G c 076.0138.01)(++= 6-3题解: 超前校正校正网络 10.03()5(10.0067) c s G s s += + 6-4题解:串联滞后校正网络为s s Ts Ts s G c 3.15419.13111)(++=++= β 6-5题解: (1)5.0=ξ,4=n ω,25.0=ssv e (2)15.0=c K , 4.0=ssv e (3)串联一个滞后校正装置 6-6题解: G s s s s s c ()...=++=++0281 00028 135713571 6-7题解:(1)) 11.0)(110()1()(2 +++=s s s s G c 所用的是串联迟后-超前校正方式: (2)校正后系统稳定时的开环增益 1100< (3)当1=K 时,?? ?=?==6.31100101 g c ωω 所以有 ? ??==? =+?=8.109)(172.83)(180g c j G h ωω?γ 6-8 题解:(a ) (1))11 .0)(110() 1(20)()()(0+++= ?=s s s s s G s G s G ca (2) ?? ???=<=? =>?=高频段被压低14.14226.355500c ca a ωωγγ 抗高频干扰能力增强。响应变慢;减小;稳定性增强,o o σ (b ) (1) )1100 (20)110(2011001 10)()()(0+=+?++=?=s s s s s s s G s G s G cb (2) ?? ????=>?=+?==>=高频段被抬高26.357.78)(18014.142000γω?γωωcb b b c cb 抗高频干扰能力下降。减小;响应速度加快; 0σ 6-9题解:6.01=T ,54.31=K 6-10题解: 02.00199.0≈=t K ,1.0=r T 6-11题解: s s G c 10)(= 6-12题解:1=τ 6-13题解: )387.1()()(1+-=+-=s s K K s s s G t n 第7章 习题答案 7-2 a )112() ()1()()G s G s G s G s = + b) []12()()1()G s G s G s =+ c )121()() ()1() G s G s G s G s = + 7-3 a )交点为自振点;b) 交点为不稳定工作点; c )交点为自振点; d )交点a 为不稳定工作点;交点b 为自振点;e) 系统不稳定;f) 系统不稳定;g )交点a ,c 为自振点、b 不稳定工作点;h) 系统稳定。 7-4 3.12s 14.4121-=== A ,ω 7-6 1) 320< 2 < 2(246s 11 -<<--==K K K A ,ω 7-7 1) 系统有自振,5.25s 14.4121-=== A ,ω a b 4 3π< 2) 为使系统稳定,继电器参数a ,b 应满足7-8 略 7-9 0e =为开关线,相轨迹如图所示。 0e =时,相轨迹在开关线上有幅度为2M 的跳变。当0e >时,相轨迹下跳,当0e <时 相轨迹上跳,最终收敛于坐标原点。 7-10 1e =-、1e =为开关线,相轨迹如图所示, 为闭合的环形。说明系统运动为等幅振荡,且和初 始条件无关。 7-11 略 第8章 参考答案 8-1(1)a z z z E -= )(; (2)T e z z z z z E 21)(--+-=; (3)aT aT aT e T ze z T ze z E 22cos 2sin )(---+-=ωω; (4)3 3332)1() 1()(-+=z e z e z e T z E T T T ; (5)) )(1()1()(aT aT e z z z e a K z E -----=; (6)?? ? ???----= --bT aT e z z e z z a b z E 1)(; (7)2 )()(T T a e z a Tze z E ---=; (8)2 2)1() 1()(--+=z z z z z E 。 8-2(1)∑∞ =-= * )(5 .0)(k k kT t t e δ; (2)∑∞ =--= 0* )()12 ()(k k kT t t e δ; (3)∑∞ =-------=0* )()(k bT aT bkT akT kT t e e e e t e δ; (4)∑∞ =--= * )()1.0718.078()(k k k kT t t e δ; (5) +-+-+-+-+-+=)5(621)4(303)3(145)2(67)(29)(11)(* T t T t T t T t T t t t e δδδδδδ; (6) +-+-+-+-+-+=)5(593.7)4(187.7)3(375.6)2(75.4)(5.3)()(*T t T t T t T t T t t t e δδδδδδ。 8-3(1)0)(,1)0(=∞=e e ; (2)0)(,1)0(=∞=e e ; (3)0)(,1)0(=∞=e e ; (4)∞=∞=)(,0)0(e e 。 8-4(1)k k y k 25.0)5.0(5.01)(++=; (2)1)(=k y 。 8-5 (a)) )((10522 T T e z e z z ---- ; (b) )()(1)(2121z H z G G z G G +; (c) ) ()()(1) (z H z G z GF z G ++; (d))()()(1)()(21221z H G z G z G z G z G ++ 。 8-6 368 .0736.1368.2632.0)(2 32 -+-=z z z z z C 8-7 (1)不稳定 ; (2)不稳定 ; (3)稳定 ; (4)不稳定 。 8-8 (1)不稳定 ; (2)稳定 。 8-9 k kT c )37.0(47.01)(-= ( ,2,1,0=k ) 8-10 不稳定 。 8-1132.4=K 。 8-12 368 .0368.1264 .0368.0)(2 +-+= z z z z G , 632.0264.0368.0)(2+-+=Φz z z z , +-+-+-+-+-=)5(147.1)4(4.1)3(4.1)2()(368.0)(* T t T t T t T t T t t c δδδδδ。 8-13 (1)0,)264.0(5.05.0)(≥--=k kT C k (2)658.80< (2)0,=∞=ss p e K ; 1,1==ss v e K ; ∞==ss a e K ,0; (3)1=ss e 。 8-15 +-+-+-+-=)4(662.0)3(522.0)2(349.0)(158.0)(*T t T t T t T t t c δδδδ 。 8-16 10>K 。 8-17 380<