摇板造波机规则波模拟性能测试
基于压差法的波向测量方法初步研究
上的波浪在 360
°上均有浪向分布。在某一时刻,不同
得圆周上不同点的压差数据,采用最小二乘法对采集
方向上的波浪能量分布不同,其主波向上的波浪能量
的圆周上多点压差值进行数据拟合,可得出压差值的
分布最大,波浪能量同波高和波周期有关,通过将多个
变化曲线是一条拟合的正弦曲线,找出变化曲线的峰
压力传感器在水下布设呈一定几何形状,可测量海浪
方向上的压力传感器同圆心点上的压力传感器之间的差值进行分析,找出变化规律与波向的关系,以此得出真实的波向分
布。本文通过波浪水池实验验证了该方法的可行性,并通过对实验数据的解析初步得出了压差变化规律与波向的变换关
系。
关键词: 波向测量;压力传感器;压差测量;水下安装;几何分布;圆周压差法
中图法分类号: P756.
33
.75 m 的铰接推板式不规则波造波机,最大工作水深
1
.2 m,波高变化范围0
.05~0
.25 m,波周期变化范围
0
.5~2
.5s,在合适周期范围内斜向规则波最大波向角
45
°(最大有效波高 0
.16 m),可模拟规则波、椭圆余弦
波、叠加破碎波、孤立波、国内外常用的频谱(
J谱、
PM
谱、
B 谱、
MPM 谱、中国港工规范谱等)以及自定义频
波浪传播方向是指波浪的来向[5],仪器观测一般
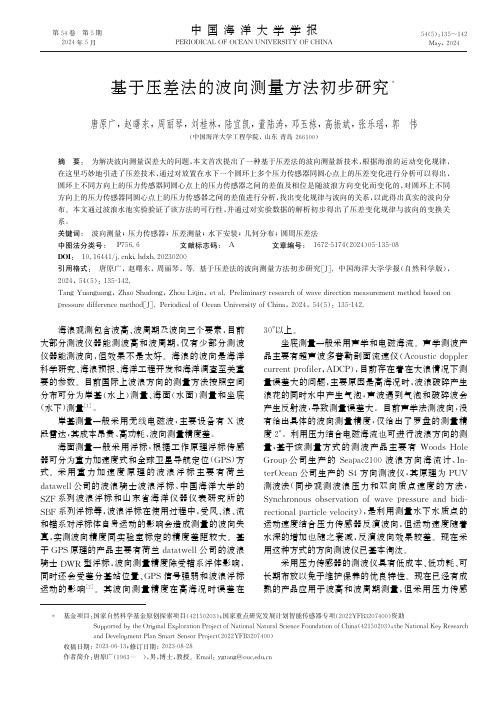
图3 水池中的实验装置
F
i
3 Exp
e
r
ime
n
t
a
ld
e
v
i
c
ei
npo
o
l
g.
规定从北向南(参考地理北或磁北)传播的波向为 0
转阀控制式造波实验台的设计与实验

转阀控制式造波实验台的设计与实验李硕;刘毅;王涛;蒋澎【摘要】设计了一种推板与摇板两用的造波机械机构,在电液转阀控制技术基础上,完成了实验平台的设计,搭建出转阀控制式液压造波实验平台,并在水槽中进行了造波实验.结果表明,该造波试验台达到了目标波高的实验,易于生成各种形式的波浪,不同的造波形式丰富了造波实验的过程,让学生更深入地了解造波实验,有助于学生理解波浪产生的机理.【期刊名称】《实验室研究与探索》【年(卷),期】2018(037)009【总页数】5页(P57-61)【关键词】转阀控制;液压系统;造波实验【作者】李硕;刘毅;王涛;蒋澎【作者单位】安徽理工大学机械工程学院,安徽淮南232001;浙江大学宁波理工学院,浙江宁波315100;浙江大学宁波理工学院,浙江宁波315100;安徽理工大学机械工程学院,安徽淮南232001;浙江大学宁波理工学院,浙江宁波315100【正文语种】中文【中图分类】TV131.60 引言目前进行波浪模拟教学与研究,船舶水动力性能研究以及海岸工程海洋工程等领域的研究越来越受到重视[1],其中造波仪器在各种研究与教学中都处于十分重要的位置[2]。
造波机由控制系统、驱动系统和推波板等组成,在控制系统的作用下,驱动系统带动推波板按照一定的规律运动,推波板推动水体,进而形成各种形式的模拟水波浪,用于研究波浪对行船、码头、及堤坝等水中建筑物的作用[3-4]。
由于水池中的实验需要动用大型设备和较多的实验人员,导致波浪生成研究能耗大,用时长,效率低,不方便进行研究和实验[5-6]。
因此,如何建立控制简单的造波试验台是解决上述问题的关键。
本文基于电液转阀控制技术[7-10]设计了一种推板和摇板造波集成的液压造波平台[11],并根据造波机设计参数的实验要求,设计了造波机构以及液压系统,完成了试验台的液压元件的设计和选型,并成功搭建了液压造波实验平台,用于水动力学研究与教学。
1 实验台的工作原理1.1 造波机械结构原理造波机构在水槽宽0.6 m、高0.9 m、长12 m的水槽中工作,因此造波板设计尺寸为长1.1 m、宽0.6 m,并设计与其配合使用的连杆滑块等。
波浪水槽综合实验
波浪水槽综合实验一、实验目的:1、了解波浪水槽实验的基本原理和理论基础:包括基本造波方法、波浪理论、相似理论和近岸波浪传播现象2、了解造波机、浪高仪的基本构成和测量原理。
3、 通过实验采集一组波浪信号,分析波浪频谱特征4、 观测海堤附近波浪现象和越浪形态。
二、实验原理:1.造波方法和基本波浪理论自由表面重力波是船舶工程、海洋工程和海岸工程领域十分普遍的现象,配备造波机的波浪水槽是模拟波浪与二维结构物相互作用的常用实验设备。
通过给定造波信号由液压泵或步进电机控制推板运动,在波浪水槽中产生特定波列。
距离造波板2-3个波长外可以略去局部非传播模态的影响,可认为水槽中为行进波。
在水槽中通过浪高仪可以测量水槽中不同位置的波面时间过程线。
水槽中常用测力天平和压力传感器测量水动力载荷。
水槽末端设置多孔介质构成的消波区,消除反射波。
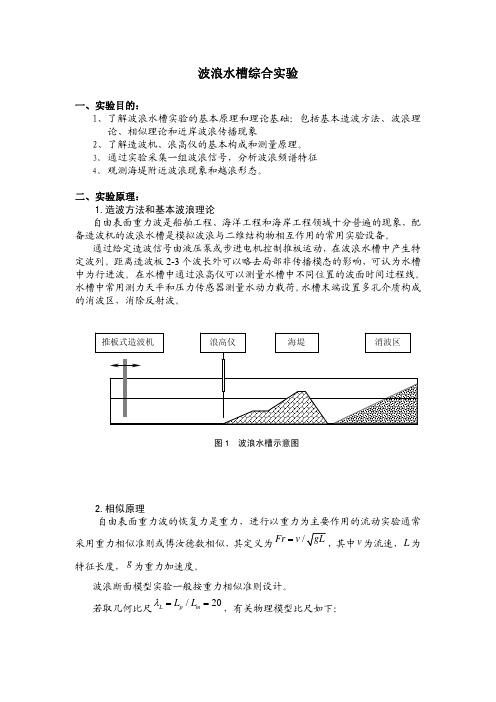
图1 波浪水槽示意图2.相似原理自由表面重力波的恢复力是重力,进行以重力为主要作用的流动实验通常采用重力相似准则或傅汝德数相似,其定义为/Fr v =,其中为流速,L 为特征长度,为重力加速度。
v g 波浪断面模型实验一般按重力相似准则设计。
若取几何比尺/2L p m L L 0λ==,有关物理模型比尺如下:时间比尺: 4.47t λ==速度比尺:4.47v λ==重度比尺: 38000WL λλ==单宽流量比尺:89.44Q λ==式中为工程原型长度,为模型长度。
pL mL 风速模拟通常按重力相似,风速测点位于测量断面上方中心。
3 近岸波浪现象3.1 线性波浪理论在平底均匀水深域中,根据势流理论波浪呈周期性分布。
单色行波波浪参数包括波浪周期T ,波长L ,波高H 和水深h ,如图2所示。
周期、波长和水深满足色散关系,对于线性波浪其表达式为,,其中波浪圆频率2tanh gk kh ω=2/T ωπ=,波数2/k L π=。
波高水深比为小量的波浪称为小振幅波,可用线性波浪理论描述,见图3。
造波机主动消波系统现状与发展趋势

Advances in Marine Sciences 海洋科学前沿, 2019, 6(4), 117-127Published Online December 2019 in Hans. /journal/amshttps:///10.12677/ams.2019.64013Current Situation and Development Trendof Active Absorption Wave-Making Systemfor WavemakerYiping Ni1,2, Yugang Li1,21Deepwater Engineering Research Center, Dalian University of Technology, Dalian Liaoning2State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian LiaoningReceived: Oct. 28th, 2019; accepted: Nov. 13th, 2019; published: Nov. 20th, 2019AbstractIn the field of marine engineering, people often use the method of physical model test to research in basin or tank. In the experiments, wavemaker is the core of the realization of wave simulation based equipment, but the wave-making system tends to produce secondary reflection that is ad-verse for experiments. So the reflected wave needs to be absorbed. There are two kinds of wave absorption methods—passive and active wave absorption. At present active wave absorption be-comes the mainstream in the wave absorption technique. On the basis of comprehensive analysis of the present situation of domestic and international test basin and wave-making technology, combined with the needs of engineering practice, this paper points out the existing problems of active wave absorption method, and summarizes the wave absorption technique of wavemaker.KeywordsWavemaker, Active Wave Absorption, Irregular Wave造波机主动消波系统现状与发展趋势倪艺萍1,2,李玉刚1,21大连理工大学,深海工程研究中心,辽宁大连2大连理工大学,海岸和近海工程国家重点实验室,辽宁大连收稿日期:2019年10月28日;录用日期:2019年11月13日;发布日期:2019年11月20日倪艺萍,李玉刚摘 要在海洋工程领域中,常采用在水池或水槽等设施中进行物理模型试验的方法研究问题。
交流伺服16单元摇板式造波系统

图 1 出了 中国特种 飞行 器研 究所 高速水 动力 实验 室水 池 示 新 近 投 入使 用 的采 用 交 流伺 服 电 动 机 和 电动 缸 的摇 板 式 造 波
机。 该水 池 宽 6 5 水 深 5 长 5 0 造波 机共 1 . m、 m、 1 m。 6单元 , 宽 板
0 4 在 波长 6 . m。 m~1 m 范 围内实测 波高 大 于 0 5 最 大波 高 0 . m,
0. 6m 。
电动机驱 动 的曲柄连 杆 机构造 波机 以及 空气式 造波 机 由于 难 以生 成不规 则波 而被 电液伺 服造 波机 所取 代 。 在 国内 , 电 但 用
机作 动力 来取 代液 压 的努 力 一直 没有 停 止 过 , 如使 用 低 惯 量 诸 电机加 可 控硅 调速 装 置 的推 板 式 造波 机 ]使 用 三 相交 流 异 步 、 电机加 变 频调 速 的推 板式 造 波 机 等 , 在性 能 上 都不 及 电液 但 伺 服 的方式 。 文献 [ ] 文 献 [ ] 4、 5 使用 交流伺 服 电机来 改造 冲箱 式
维普资讯
中
国
造
船
学 术 论 文
以“ 流伺服式 造波 机 ” 为这 种新 型造波 机的 简称应 当是合 适 的 , 交 作 它与 电液伺 服式 造波机 相对应 , 与 并 曾经有 过的使 用其他 类 型电动 机 的造 波机 相 区别 。
2 系统 组 成
维普资讯
4 8卷
第 4期 ( 第 1 9期 ) 总 7
中
国
造
船
Vo . 8 NO 4( e i1 NO 1 9) 1 4 . S ra . 7
推板式造波机的参数计算

推板式造波机的参数计算一、推板式造波机基本参数确定推板式造波机利用电机驱动推波板做活塞运动,进而使水体产生波动。
波高由推波板的行程和速度决定,波长由往复运动的频率决定。
其结构示意图如图示,L为波长,H为波高,h为水深,A为行程的一半。
其中推板式造波机所需提前确定的基础参数有:水池长度:L,最大水深:h,推板的高度:H,推板的宽度:d,推板的厚度:bmax二、推板式造波机参数计算基本流程图中各参数意义:T 为规则波的周期,h 为水深,m为造波机运动结构的质量,d为单元推波板的宽度,L 为波长,k 为波数,Hb 为最大破碎波高,Kn 、Ma 、Da 为中间变量,Smax 为最大行程,Vmax 最大速率,Fmax 为单元最大负载力,Pmax 为单元最大负载功率。
(备注:造波的波周期:考虑到我国沿海海域波浪的平均周期S Ta 0.70.2-=,设模型与原型重力相似,Froude 数相同,取比例因子10=λ,则模型试验拟造波的波周期λTaT =,即取S T 2.2-6.0=)三、推板式造波机参数计算具体步骤(1)、符号的意义h :水深;T :波周期;d :推波板宽;m :推波板质量;L :波长;H:行进波的波高S:行推波板运动行程Smax :推波板最大行程;Vmax :推波板最大速度;Hmax :最大波高;k:波数;A:行进波的波高与推波板运动行程s 的比值为A ,其被称为造波机系统的水动力传递函数。
(2)、计算公式给定h 和T1) 计算波长L:L =gT 22π×tanh (kℎ) (1) 式中:k =2πL (2)式中双曲正切函数:tanh (x )=sinh (x)cosh (x)=e x −e −xe x +e −x式中:−1≤tanh (x )≤1 (3)2)计算最大波高Hmax 和水动力函数A:计算由波的破碎决定的最大波高Hmax :H max =0.142Ltanℎ(kℎ) (4) 计算水动力函数A :Sinℎ(x )=e x −e −x A =H =4Sinℎ2(kℎ)() (5)3)计算最大行程Smax :S max =H max A(6)4)计算最大运动速度Vmax :ω=2πTV max =ωS max 2(7)5)计算单元最大负载力Fmax造波机工作时,推板做来回往复直线运动,其位移、速度、加速度公式如下:位移:x =12S max Sinωt速度:v =12ωS max Cosωt加速度:a =−12ω2S max Sinωt利用势函数理论计算负载力F (t )=(m +2Ma ×d )a +2Da ×d ×v +R f=−12ω2S max Sinωt (m +2Ma ×d )+Da ×d ×ωS max Cosωt +R f =Fa (t )+Fi (t )+Fp (t )+R f(备注:式中m 为造波机运动结构的质量,Ma 、Da 为中间参数,d 为单元推波板的宽度,ω等于2ΠT ,S max 为最大行程,R f 为造波机的摩擦阻力,由于采用伺服电机驱动滚珠丝杠带动推波板的往复直线运动,该摩擦阻力可近似为零。
基于LabVIEW的摇板式造波机监控系统设计

青 岛大 学 学 报 ( 程 技 术 版 ) 工 J OURNAL OF QI NGDAO UNI RS T ( VE I Y E&T)
V o125 N O . .3
Se p. 2 0 1 0
文章 编 号 : 0 6—9 9 ( o O 0 10 7 8 2 l ) 3—0 0 0 1—0 5
言 , 好 的 集 成 数 千 款 硬 件 设 备 , 通 过 上 百 个 内 置 库 函 数 实 现 高 级 分 析 和 数 据 的 可 视 化 。将 L b E 2很 ] 能 a VI W
和 NI 的运 动控 制卡一 起 运用 到造 波机控 制 系统 的设计 中 , 高效 的实现 各 种造 波 程序 、 据采 集及 数 据分 析 数 程 序 的编制 , 其生 成 的应用 程序 能对造 波 机 的运行情 况进 行 实时监 视 和控制 , 以减少 程序开 发 的时间 和工 可
作量。
1 造 波 机 系 统 结 构
现有 造波 机 的传动类 型 有 2 , 种 即液压传 动 和机 械传 动_ 。液压传 动 价格较 高 , 液压 的维 护及维 修 复 3 ] 但 杂, 经常 出现漏 油现 象 , 而机 械传 动价 格较低 , 靠性 较 高 。该 系统 采用 机械 传 动 , 动机 为 交 流伺 服 电机 , 可 原
中 图 分 类 号 :TP2 3 7 文 献 标 识 码 :A
摇 板 式 造 波 机 是 小 型 室 内 风 浪 试 验 水 槽 配 套 的基 础 设 施 。 它 的 作 用 是 在 水 槽 中 激 起 不 同波 长 和 波 高 的
规 则波或 不规则 波 , 模拟 实 际海洋 环境 中 的各种 波浪 。该 系统 可与 P V 系 统 、 外 热像 系统 、 面微 结 构光 I 红 海
船模拖曳水池实验室工程设计研究

船模拖曳水池实验室工程设计研究唐勇;徐猛;李华梅;黄凌寅;徐剑【摘要】本文在总结中船九院公司诸多水池工程案例的基础上,梳理了船模拖曳水池实验室的设计思路,比较完整阐述了该类型水池工程设计的特点,包括水池主尺度、水工结构工程、建筑结构工程、主要工艺系统等,最后通过工程案例介绍了拖曳水池的建设规模和投资估算的确定方法.【期刊名称】《造船技术》【年(卷),期】2016(000)002【总页数】6页(P69-74)【关键词】拖曳水池;主尺度;船模长度;建设规模;投资估算【作者】唐勇;徐猛;李华梅;黄凌寅;徐剑【作者单位】中船第九设计研究院工程有限公司,上海 200063;上海海洋工程和船厂水工特种工程技术研究中心,上海 200063;中船第九设计研究院工程有限公司,上海 200063;中船第九设计研究院工程有限公司,上海 200063;上海海洋工程和船厂水工特种工程技术研究中心,上海 200063;中船第九设计研究院工程有限公司,上海200063;中船第九设计研究院工程有限公司,上海 200063【正文语种】中文【中图分类】U661Investment estimation船模拖曳水池是进行各种民用及军用船舶模型快速性及部分耐波性试验的专业设施,可进行阻力、敞水、流线、伴流场等试验内容,并预报实船航行性能,也可以进行水面地效应飞行试验、水下航行试验、大型船模高速拖曳试验等,是船舶与海洋工程领域最基础、最重要的科研设施。
船模拖曳水池实验室包括试验水池、模型安装调试区域、仪器控制及数据采集区域、公用动力区域等部分,其建设规模及造价主要由水池主尺度、水工结构工程、建筑结构工程、主要工艺系统等因素控制。
1.1 水池主尺度拖曳水池是一个永久性建筑物,一旦建成以后,除了长度有可能接长外,水池宽度和深度是无法改变的,所以在决定主尺度时,考虑到目前使用及今后可能的发展趋势,其主要尺度取决于缩尺比和船模大小的选择。
1.1.1 试验水池长度现代试验水池多采用等速度方法进行阻力测试,它的使用范围广泛,且便于采用新的试验技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摇板造波机规则波模拟性能测试
随着港口工程的不断发展, 物理模型试验对造波机的功能和 性
能提出了越来越高的要求。 摇板造波机采用伺服电机和丝杠导 轨驱
动, 通过摇板式设计有效缩小了造波机的体积, 使其安装方 便、灵
活,从很大程度上提高了物理模型试验的效率。新建造波 机投入使用
前必须对其性能进行测试, 以检验造波机的性能, 为 物理模型试验
的设计和比尺选择提供参考。 本文对摇板造波机的 规则波模拟性能进
行测试。
1 造波机系统简介 [1]
本文测试的造波机采用计算机无线远程控制, 通过运动控制 器
实现对伺服电机的控制, 并由伺服电机驱动滑块导轨系统 [2] , 从
而实现推波机构的运动以模拟出要求的波浪,推波板总宽度
18m高度0.45m,最大试验水深40cm最大摆角范围-28°〜 28°。造波
机采用 380V 三相交流电供电,输出功率大,运动平 滑,响应快,维
护简单方便。试验时,通过上位计算机上的控制 软件界面进行控制,
操作简单方便。
该造波机的工作原理如下: 造波机工作时, 在控制计算机上 输
入所需的造波参数,完成造波控制信号的计算 [3] ,经无线网 传输到
运动控制器中, 运动控制器将造波控制信号传输到伺服驱 动器中,
由伺服驱动器控制伺服电动机的转动, 电动缸将伺服电 动机输出轴的
转动转换为电动缸推杆的直线运动, 并经过杠杆机 构将运动传递到推
波板使其产生摇摆运动, 推波板推水而产生波 浪[4] 。同时,伺服驱
动器的编码器经接口电路实时反馈至运动 控制器以对推波机构的运动
实时监控, 如有异常, 伺服驱动器将 使伺服电机停止运动并发送报
警信号至运动控制器, 再由运动控 制器将报警信号发送至控制计算机
上的控制软件界面。
2 试验水池及仪器布置
试验水池长25m宽25m深0.6m。港池摇摆可移动式造波 机安装在
水池的一端。 造波机后布置消波框, 能有效防止波浪二 次反射,水
池末端设有 1: 5 的块石斜坡,以吸收多余波浪能量 ⑸。如图3所
示,从造波机前6m处开始布置共12台浪高仪, 用于采集水池不同位
置处的波浪数据, 浪高仪的编号和间距如图 所示。
3 试验内容及结果分析
结合水池深度和造波板高度,试验水深选用有效水深 38cm。
试验波浪分为规则波。
3.1 波浪时间序列的波峰线平直性
图 2 给出了在水池中传播的典型规则波列 [6] ,图中,横坐 标
为时间(s),纵坐标为波高(cm)。由图中可以看出,波浪 时间序列
的波峰线是一条直线。 本次测试试验结果均在保证规则 波形的情况下
取得的。
3.2 不同周期的波高最大值分布
通过系列实验, 造波机在本实验水池可生成的规则波范围如
图3。图中横坐标为规则波周期 T,纵坐标为对应周期下可生成 的最大
稳定规则波。
3.3 同一波峰线上的波面平稳度 波面的平稳度采用下式表示,平
稳度越小表示波面越平稳。
(式 1)
式中,Si—波面平稳度,一第i点的平均波高,H0-目标波 高。
表 1 详细列出了不同周期时最大波高情况下同一波峰线上 的波
浪平稳度。其中第二排的 15#和 18#在同一波峰线上, 16# 和 17#在
同一波峰线上。
从表 1 可以看出,各测点在不同周期时的平稳度最大为 6.5%,
造波机生成的规则波在同一波峰线上的波面大致比较平 稳,仅在两侧
的边壁附近由于直墙摩擦导致波形滞后。
3.4 不同时间段的造波稳定性
在上午(8: 00〜12: 00)和下午(13: 00〜18: 00)两个 不同
时间段,输入相同参数进行重复造波试验,每组重复 2 遍, 对比 2
次的最大误差。试验结果见表 2。
可以看出,该造波机在不同时间段生成的规则波波高相差不 大;
在不同时间段内两次重复试验的波高误差也相差很小, 且均 不超过
3%。因此,该造波机在不同时间段的对于规则波的造波 性能稳定,能
够满足模型试验的要求 [7] 。
4 结论
该造波机能生成的规则波时间序列的波峰线平直度理想, 周
期范围为0.6〜2.5s,在周期为1.2s时可生成最大规则波波高, 最大
波高为15.49cm ;规则波波形重复性良好,规则波波面平稳 度小于
6.5%;不同时间段时间生成波浪的稳定性良好,生成波 浪的波高误差
小于 3%。能够满足物理模型试验的要求。
试验前,应参考造波机模拟规则波时的上述特性设计好模型 并选
择合理的比尺, 以充分发挥造波机的效能, 从而保证物理模 型试验
的质量和效率。