船舶与海洋工程论文中英文资料外文翻译文献
船舶工程外文翻译----船舶结构安全性和可靠性
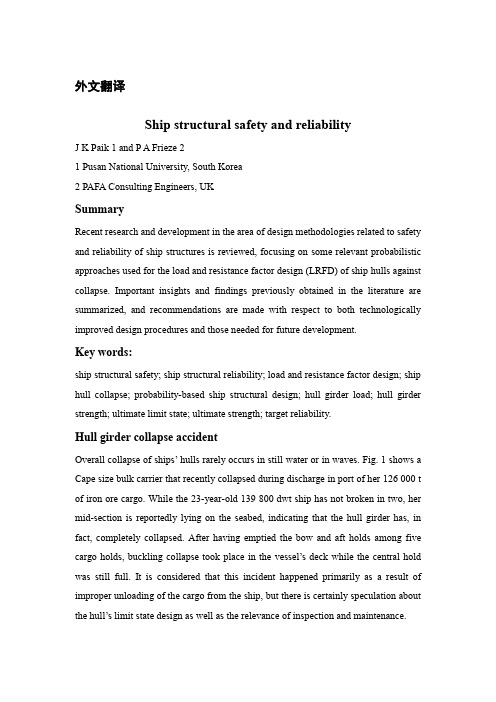
外文翻译Ship structural safety and reliabilityJ K Paik 1 and P A Frieze 21 Pusan National University, South Korea2 PAFA Consulting Engineers, UKSummaryRecent research and development in the area ofdesign methodologies related to safety andreliability of ship structures is reviewed, focusing onsome relevant probabilistic approaches used for theload and resistance factor design (LRFD) of shiphulls against collapse. Important insights andfindings previously obtained in the literature aresummarized, and recommendations are made withrespect to both technologically improved designprocedures and those needed for futuredevelopment.Key words:ship structural safety; ship structural reliability; load and resistance factor design; ship hull collapse;probability-based ship structural design; hull girder load; hull girder strength; ultimate limit state; ultimate strength;target reliability.Hull girder collapse accidentOverall collapse of ships’ hull s rarely occurs in stillwater or in waves. Fig. 1 shows a Capesize bulk carrierthat recently collapsed during discharge in port of her126 000 t of iron ore cargo. While the 23-year-old139 800 dwt ship has not broken in two, her mid-section is reportedly lying on the seabed, indicatingthat the hull girder has, in fact, completely collapsed.After having emptied the bow and aft holds amongfive cargo holds, buckling collapse took place in thevessel’s deck while the central hold was still full. It isconsidered that this incident happened primarily asa result of improper unloading of the cargo from theship, but there is certainly speculation about the hull’slimit state design as well as the relevance of inspectionand maintenance.Fig. 1 A ship hull collapse during unloading of cargo at port(Courtesy of Lloyds List)A ship hull in the intact condition will clearlysustain applied loads smaller than the design loads,and in normal sea and loading conditions it will notsuffer structural failure such as buckling and collapse,except for possible localized yielding. However, theloads acting on the ship hull are uncertain, owing torough seas or unusual loading/unloading of cargo. Inthese cases, applied loads may exceed design loadsand the ship hull may collapse globally. Furthermore,since aging ships may suffer structural degradationdue to corrosion, fatigue and local damage witha consequential reduction of their structuralresistance, the hull may collapse under applied loadseven smaller than the design loads.Probability-based structural designprocedureThe main steps for probability-based ship structuraldesign are normally as follows:●establish a target reliability;●identify all unfavorable failure modes of thestructure;●formulate the limit state function for each failuremode identified above;●identify the probabilistic characteristics (mean,variance, distribution) of the random variables inthe limit state function;●calculate the reliability against the limit state withrespect to each failure mode of the structure;●assess if the predicted reliability is greater than thetarget reliability, and redesign the structureotherwise;●evaluate the reliability analysis results with respectto parametric sensitivity considerations.Modelling of hull girder strengthFour types of limit state can be considered: namely,serviceability limit state, ultimate limit state, fatiguelimit state and accidental limit state . Theserviceability limit state involves deterioration of lessvital functions including:●local damage which may reduce the durability of thestructure or affect the efficiency of structural or non-structural elements;●unacceptable deformations which affect the efficientuse of structural or non-structural elements, or thefunctioning of equipment;●excessive vibrations which cause discomfort topeople or affect non-structural elements, or thefunctioning of equipment.The ultimate limit state represents the collapse of thestructure, from factors such as: ●loss of equilibrium of the structure or part of thestructure, considered as a rigid body (e.g.overturning or capsizing);●attainment of the maximum resistance capacity ofsections, members or connections by gross yielding,rupture or fracture;●instability of the structure or part thereof, such as bybuckling of columns, plates, shells and stiffenedpanels.The fatigue limit state results from damageaccumulation under the action of cyclic loads and theaccidental limit state is due to accidents such ascollisions or grounding. Overall failure of ship hull girders, which rarelyoccurs, is normally governed by buckling and plasticcollapse of the deck, bottom or sometimes the sideshell stiffened panels. Failure of deck, bottom or sideshell stiffened panels can then lead to progressivecollapse and ultimate hull girder failure. For manyyears, ship structural researchers have been workingtowards the goal of reliability-based limit state designof ship structures. However, reliability-based designrequirescalculation of the ultimate limit state, not onlyof the hull girder, but also of all the structural panelsand other members. Also, these calculations must beperformed a large number of times.Therefore, it is notpractical to use iterative finite element analyses forthese calculations. For efficient computations, ultimatestrength formulations must be developed as closed-form expressions, both for structural components andfor the complete hull girder.A number of studies on the ultimate collapsestrength of ships’ hulls have been undertakentheoretically, numerically and experimentally .Some of the results have been reviewed by the ISSCTechnical Committee III.1 on ‘Ultimate Strength’. Theultimate strength reliability of ships’ hulls,considering existing local damage related to corrosion,fatigue and collision/grounding, has also beenstudied.Previous studies on the development ofa formulation for ultimate hull strength predictionmay be classified into three groups. The first is a linearapproach, where the behaviour of the hull up to failureof the compression flange is assumed to be linearelastic, i.e. ignoring buckling, and the ultimatemoment capacity of the hull is basically expressed asthe ultimate strength of the compression flangemultiplied by the elastic section modulus, witha simple correction for buckling and yielding .The second is an empirical approach, where anexpression is derived on the basis of experimental ornumerical data from scaled or real hull models.The third is an analytical approach, based ona presumed stress distribution over the hull section(plane sections remain plane) from which themoment of resistance of the hull is theoreticallycalculated, taking into account buckling in thecompression flange and yielding in the tensionflange.The first approach is quite simple, but its accuracy isusually wanting because, after buckling of thecompression flange, the behaviour of the hull is nolonger linear, and the neutral axis changes position.Empirical formulations (the second approach) mayprovide reasonable solutions for conventional hulls,but one has to be careful in using empiricalformulations for new and general-type hulls, sincethey are usually derived on the basis of limited data, orfor a particular hull form, using an empiricalformulation . On the other hand, analyticalformulations (the third approach) can be applied tonew or general hulls because they include sectioneffects more precisely.The ship hull ultimate strength formula iseventually expressed as a function of designparameters related to geometric and materialproperties including plate thickness, yield strengthand Young’s modulus. When time-variant structuraldegradation (e.g. corrosion) is considered, the value ofmember thickness at any particular time is a functionof such damage. In probability-based design methods,all the design parameters are treated as the randomvariables. The hull ultimate strength formula forhogging normally differs from that for sagging. Limit state functionMathematically, the limit state function for structuralfailure can be given as a function of the randomvariables, as follows:f (X )=f (1x ,2x ,………n x )(1)where f (X) is the limit state function representing themargin between structural capacity and demand (i.e.loads or load effects); x i represents the designparameters.The limit state function f (X) characterizes thecondition of the structure and defines two domains ofsafety with regard to the limit surface (envelope), asfollows:f (X )>0 in the safe domainf (X )=0 on the limit surface (2)f (X )<0 in the unsafe domainWith two independent random variables, theultimate limit state function f (X) for ship hull collapseis usually taken as the margin between ship hullultimate strength u M and total bending moment t M , asfollows:f (X )=u M -t M (3)where u M and t M are functions of the design variables.Methods of reliability analysisThe methods for structural reliability analysis areusually classified into four types,namely level I, levelII, level III and level IV . The level I methodcorresponds to the deterministic or partial safety factormethod, using only one characteristic mean value foreach variable. A relevant allowable usage factor foreach variable that may be determined by calibration ofa higher level reliability method-based results isapplied in the level I reliability analysis toapproximately supplement the related uncertainties.The level II method uses two values, i.e. mean andstandard deviation, to describe the characteristics ofeach random variable. The reliability index method,e.g. the first-order second-moment method, is a typicalexample of the level II method. The level III method uses the joint probability density function to describethe characteristics of the random variables. Inreliability analyses by the level III method, eitheranalytical approximations (e.g. first- or second-orderreliability methods) or numerical simulations (e.g.Monte Carlo simulation or directional sampling) areapplied. The level IV method compares the integrityand prospect of an object structure with that ofa reference structure through the engineeringeconomic analysis, considering costs and benefitsassociated with construction, consequences ofstructural failure and maintenance/repair. The levelIV method is employed to establish the targetreliabilities.The ship structural reliability analysis is usuallyundertaken by the level III method. Since the theory ofreliability analysis is discussed in many references,e.g. Mansour and Ditlevsen & Madsen , onlya very brief description for the level III method is givenhere. Generally the probability of failure P f can becalculated as follows: f P =⎰≤0f )(X P (X )dx (4)where p(X) is the joint probability density function ofthe random variables X=1x ,2x ,………n x associated withloading, material properties, geometric characteristics,etc. andf (X) is the limit state function, defined suchthat negative values imply failure. Since f (X) is usuallya complicated nonlinear function, it is not easy toperform the integration of eq. (4) directly. Therefore,the equation is normally solved by use of approximateprocedures .With these approximations, as indicated in Fig. 2,the limit state surface is usually approximated at thedesign (failure) point by either a tangent hyper-planeor a hyper-parabola, which simplifies the mathematicsrelated to the calculation of the failure probability. Thefirst type of approximation results in the use of aso-called first-order reliability method (FORM) and the second type of approximation is central to theso-called second-order reliability method (SORM).Such methods facilitate the rapid calculation of theprobability of failure, by widely available standardsoftware. Apart from the individual probabilitydistributions of the random variables involved, thecorrelation between them can also be readilyaccounted for in such calculations; all randomvariables for various member types are considereduncorrelated. The result of such a standard reliabilitycalculation is a reliability index β which is related tothe probability of failure f P by:f P =)(βφ-(5) where is the standard normal distribution function.Fig. 2Further considerationsWhile a number of useful methodologies for analyzingthe safety and reliability of ship structures have beendeveloped over the past decades, furtherdevelopments are needed.Some furtherconsiderations in probability-based design of shipstructures are as follows:●geometric parameters may be treated asdeterministic, although this may need to beconfirmed in the case of deck and bottom platingthickness;●elastic modulus may be taken as deterministic, butyield stress needs to be treated as a random variablewith a mean value based on a fuller assessment ofstrain-rate effects on yield in large-scalerepresentative ship-type structures than presentedhere. In the first instance, yield stress values couldbe based on tensile coupon test results when wave-induced bending moments dominate, and similarlyderived static values of yield stress for dominantstill water load conditions.●hull girder and stiffened panel ultimate strengthmodels require benchmarking against realisticmechanical collapse test data so that the distributionparameters for their associated modelling errors canbe evaluated;●when time-variant structural degradation, e.g. dueto corrosion and fatigue, is considered, theprobabilistic characteristics of such damageat any particular time should be quantified. Whilesome work continues in this area, there existprobabilistic corrosion rate estimation models fortanker structures and for bulk carrierstructures;●consensus is required about the preferredmethodology for determining an appropriatereturn period of response for ship designand how this might be achieved given thecurrent status of environmental parameters anddata records;●the load factor methodology promoted in theliterature is extremely promising, particularlybecause its form is compatible with limitstate (LRFD) design code formats. Consensusis required concerning its generality andany further development. Classification Societyand naval experiences should be helpful inidentifying load combinations to be addressed.However, in identifying a safety format, accountshould be taken of relevant ISO codes (e.g. ISO 2394)in this area;●target safety and reliability initially requiresa calibration approach to determine appropriatevalues, followed by adjustments based onjudgments concerning successful designs and targetreliabilities in other industries, whilst recognizingthat floating structures probably need one order ofmagnitude (in probability of failure terms)morereliability than comparable bottom-foundedstructures, and an expectation that component andsystem reliabilities should differ by about one orderin probability of failure terms. In the context oflongitudinally stiffened ships, plate buckling shouldbe treated as a serviceability limit state and not as anultimate limit state;●partial factor determination will require some formof simplified modelling of strength, loading or thereliability process in order that such determinationcan proceed efficiently. Curve- or surface- fitting canbe applied in all cases.船舶结构安全性和可靠性J K帕克[1] P A普莱斯[2]1.韩国釜山国家大学2.英国FAFA工程师顾问摘要最近在研究和发展对该地区船舶结构的设计方法,安全性和可靠性的评估,将阻力、负荷作为因子运用概率的方法来对船体的抗损毁能力进行设计。
船舶与海洋工程专业英语
船舶与海洋工程专业英语The field of Naval Architecture and Marine Engineering is a specialized branch of engineering that deals with the design, construction, maintenance, and operation of marine vessels and structures. It encompasses a wide range of disciplines, including hydrodynamics, structural analysis, materials science, and propulsion systems.In the realm of Naval Architecture, engineers focus on the design and stability of ships, ensuring that they can withstand the forces of nature while maintaining efficiency and safety. This involves the study of ship resistance, maneuverability, and seakeeping, which are critical for the vessel's performance in various sea conditions.Marine Engineering, on the other hand, is concerned with the internal systems of the ship, such as the propulsion machinery, power generation, and auxiliary systems. Engineers in this field are responsible for the selection and integration of engines, turbines, and other mechanical equipment that provide the necessary power for the vessel's operation.The materials used in shipbuilding are also a significant aspect of this engineering discipline. Materials must be chosen for their strength, durability, and resistance to corrosion, especially when exposed to the harsh marine environment. Advances in materials science have led to theuse of composite materials and innovative coatings that enhance the longevity and performance of marine structures.Furthermore, the environmental impact of marine vesselsis a growing concern. Naval Architects and Marine Engineersare increasingly tasked with developing eco-friendly designs that reduce emissions and minimize the environmentalfootprint of ships. This includes the implementation ofenergy-efficient hull forms, the use of alternative fuels,and the integration of renewable energy sources.As the maritime industry continues to evolve, the demand for skilled professionals in Naval Architecture and Marine Engineering is on the rise. These engineers play a pivotalrole in shaping the future of maritime transportation, ensuring that ships are not only safe and efficient but also sustainable and environmentally responsible. With the ongoing advancements in technology and the push for greener solutions, the field offers a dynamic and rewarding career path forthose with a passion for engineering and the sea.。
船舶与海洋工程——相关英语论文6

Abstract: in ship structural design, many structural analyses by the finite element method are carried out on models at several different scale levels; for example, a whole ship, cargo hold parts, and detailed structures. However, one serious problem with this design and analysis process is that the generation of the finite element models for a complex configuration is very difficult and laborious. To overcome this problem, an object oriented, finite element modeling system, MODIFY, has been developed by the authors. In this paper, the concept of the finite element modeling system and the techniques for the construction of the system are explained. First, the object oriented data structure of the system, based on the Part-Object concept, is proposed. In this concept, not only the geometry of the domain but also the analytical conditions, such as boundary conditions and material properties, and the finite element model, are represented by the object oriented data structure. By using this data structure, effective finite element model generation can be expected. Second, a mesh generation algorithm based on the frontal method is described. The original frontal method by S.H. Lo was improved for application to three-dimensional curved surfaces. A new inner node placement technique to make quadrilateral elements around stress concentrated areas is also proposed. These techniques are suitable for ship structures, and more accurate results from the finite element analysis can be expected. Moreover, the parallel mesh generation is implemented in MODIFY by using the client-server concept to accelerate mesh generation. Third, a prototype system for the automatic finite element model generation for different analysis levels is proposed. The system is based on the concept of the PD part, which is the part in the design and production stage, and automatic computing of the intersection between PD parts. The validity of this system is demonstrated by some examples. Key words: mesh generation, finite element method, object oriented, object oriented database, parallel mesh generation
上交大船舶与海洋工程英语

上交大船舶与海洋工程英语1. IntroductionThe field of ship and ocean engineering is an important discipline that focuses on the design, construction, and maintenance of ships and offshore structures. It requires a solid understanding of engineering principles as well as specific knowledge of naval architecture, hydrodynamics, and marine systems. In this document, we aim to provide a comprehensive overview of the key concepts and terminology in ship and ocean engineering.2. Naval ArchitectureNaval architecture is the branch of engineering concerned with the design and construction of ships. It involves the calculation and optimization of ship characteristics such as hull form, stability, and resistance. Naval architects play a crucial role in ensuring the safety and performance ofvessels by considering factors such as buoyancy, hydrostatics, and structural integrity.3. HydrodynamicsHydrodynamics deal with the behavior of fluids in motion, particularly in relation to ships and offshore structures. Understanding hydrodynamics is essential in designingefficient propulsion systems, predicting the performance of ships in different sea conditions, and analyzing theinteraction between vessels and waves. It involves the studyof fluid dynamics, wave theory, and the measurement andcontrol of ship motions.4. Marine SystemsMarine systems encompass various onboard systems and equipment necessary for the operation and functionality of ships and offshore structures. These systems include power generation and distribution, navigation and communication, environmental control, and safety equipment. Marine engineers are responsible for ensuring the reliable operation and integration of these systems in accordance with international regulations and standards.5. Offshore EngineeringOffshore engineering focuses on the design andconstruction of structures that operate in marine environments, such as oil platforms, wind turbines, and underwater pipelines. It involves considerations of environmental forces, such as waves, currents, and wind loads, as well as the unique challenges posed by the harsh offshore conditions. Offshore engineers must ensure the structural integrity and safety of these installations while optimizing their performance and sustainability.6. ConclusionShip and ocean engineering is a multidisciplinary field that combines principles of naval architecture, hydrodynamics, and marine systems. It plays a crucial role in the development and maintenance of ships, offshore structures,and marine systems. This document aimed to provide anoverview of the key concepts and terminology in this field.By understanding the principles and practices of ship and ocean engineering, we can continue to advance maritime technology and contribute to the sustainable development ofthe maritime industry.笔者:百度文库文档创作者。
船舶制造中英文对照外文翻译文献
船舶制造中英文对照外文翻译文献(文档含英文原文和中文翻译)Spatial scheduling for large assembly blocks inshipbuildingAbstract: This paper addresses the spatial scheduling problem (SPP) for large assembly blocks, which arises in a shipyard assembly shop. The spatial scheduling problem is to schedule a set of jobs, of which each requires its physical space in a restricted space. This problem is complicated because both the scheduling of assemblies with different due dates and earliest starting times and the spatial allocation of blocks with different sizes and loads must be considered simultaneously. This problem under consideration aims to the minimization of both the makespan and the load balance and includes various real-world constraints, which includes the possible directional rotation of blocks, the existence of symmetric blocks, and the assignment of some blocks to designated workplaces or work teams. The problem is formulated as a mixed integer programming (MIP) model and solved by a commercially available solver. A two-stage heuristic algorithm has been developed to use dispatching priority rules and a diagonal fill space allocation method, which is a modification ofbottom-left-fill space allocation method. The comparison and computational results shows the proposed MIP model accommodates various constraints and the proposed heuristic algorithm solves the spatial schedulingproblems effectively and efficiently.Keywords: Large assembly block; Spatial scheduling; Load balancing; Makespan; Shipbuilding1. IntroductionShipbuilding is a complex production process characterized by heavy and large parts, various equipment, skilled professionals, prolonged lead time, and heterogeneous resource requirements. The shipbuilding process is divided into sub processes in the shipyard, including ship design, cutting and bending operations, block assembly, outfitting, painting, pre-erection and erection. The assembly blocks are called the minor assembly block, the sub assembly block, and the large assembly block according to their size and progresses in the course of assembly processes. This paper focuses on the spatial scheduling problem of large assembly blocks in assembly shops. Fig. 1 shows a snapshot of large assembly blocks in a shipyard assembly shop.Recently, the researchers and practitioners at academia and shipbuilding industries recently got together at “Smart Production Technology Forum in Shipbuilding and Ocean Plant Industries” to recognize that there are various spatial scheduling problems in every aspect of shipbuilding due to the limited space, facilities, equipment, labor and time. The SPPs occur in various working areas such as cutting and blast shops, assembly shops, outfitting shops, pre-erection yard, and dry docks. The SPP at different areas has different requirements and constraints to characterize the unique SPPs. In addition, the depletion of energy resources on land put more emphasis on the ocean development. The shipbuilding industries face the transition of focus from the traditional shipbuilding to ocean plant manufacturing. Therefore, the diversity of assembly blocks, materials, facilities and operations in ship yards increases rapidly.There are some solution pr oviders such as Siemens™ and Dassult Systems™ to provide integrated software including product life management, enterprise resource planning system, simulation and etc. They indicated the needs of efficient algorithms to solve medium- to large-sized SPP problems in 20 min, so that the shop can quickly re-optimize the production plan upon the frequent and unexpected changes in shop floors with the ongoing operations on exiting blocks intact.There are many different applications which require efficient scheduling algorithms with various constraints and characteristics (Kim and Moon, 2003, Kim et al., 2013, Nguyen and Yun, 2014 and Yan et al., 2014). However, the spatial scheduling problem which considers spatial layout and dynamic job scheduling has not been studied extensively. Until now, spatial scheduling has to be carried out by human schedulers only with their experiences and historical data. Even when human experts have much experience in spatial scheduling, it takes a long time and intensive effort to produce a satisfactory schedule, due to the complexity of considering blocks’ geometric shapes, loads, required facilities, etc. In pract ice, spatial scheduling for more than asix-month period is beyond the human schedulers’ capacity. Moreover, the space in the working areas tends to be the most critical resource in shipbuilding. Therefore, the effective management of spatial resources through automation of the spatial scheduling process is a critical issue in the improvement of productivity in shipbuilding plants.A shipyard assembly shop is consisted of pinned workplaces, equipment, and overhang cranes. Due to the heavy weight of large assembly block, overhang cranes are used to access any areas over other objects without any hindrance in the assembly shop. The height of cranes can limit the height of blocks that can be assembled in the shop. The shop can be considered as a two-dimensional space. The blocks are placed on precisely pinned workplaces.Once the block is allocated to a certain area in a workplace, it is desirable not to move the block again to different locations due to the size and weight of the large assembly blocks. Therefore, it is important to allocate the workspace to each block carefully, so that the workspace in an assembly shop can be utilized in a most efficient way. In addition, since each block has its due date which is pre-determined at the stage of ship design, the tardiness of a block assembly can lead to severe delay in the following operations. Therefore, in the spatial scheduling problem for large assembly blocks, the scheduling of assembly processes for blocks and the allocation of blocks to specific locations in workplaces must be considered at the same time. As the terminology suggests, spatial scheduling pursues the optimal spatial layout and the dynamic schedule which can also satisfy traditional scheduling constraints simultaneously. In addition, there are many constraints or requirements which are serious concerns on shop floors and these complicate the SPP. The constraints or requirements this study considered are explained here: (1) Blocks can be put in either directions, horizontal or vertical. (2) Since the ship is symmetric around the centerline, there exist symmetric blocks. These symmetric blocks are required to be put next to each other on the same workplace. (3) Some blocks are required to be put on a certain special area of the workplace, because the work teams on that area has special equipment or skills to achieve a certain level of quality or complete the necessary tasks. (4) Frequently, the production plan may not be implemented as planned, so that frequent modifications in production plans are required to cope with the changes in the shop. At these modifications, it is required to produce a new modified production plan which does not remove or move the pre-existing blocks in the workplace to complete the ongoing operations.(5) If possible at any time, the load balancing over the work teams, i.e., workplaces are desirable in order to keep all task assignments to work teams fair and uniform.Lee, Lee, and Choi (1996) studied a spatial scheduling that considers not only traditional scheduling constraints like resource capacity and due dates, but also dynamic spatial layout of the objects. They usedtwo-dimensional arrangement algorithm developed by Lozano-Perez (1983) to determine the spatial layout of blocks in shipbuilding. Koh, Park, Choi, and Joo (1999) developed a block assembly scheduling system for a shipbuilding company. They proposed a two-phase approach that includes a scheduling phase and a spatial layout phase. Koh, Eom, and Jang (2008) extended their precious works (Koh et al., 1999) by proposing the largest contact area policy to select a better allocation of blocks. Cho, Chung, Park, Park, and Kim (2001) proposed a spatial scheduling system for block painting process in shipbuilding, including block scheduling, four arrangement algorithms and block assignment algorithm. Park et al. (2002) extended Cho et al. (2001) utilizing strategy simulation in two consecutive operations of blasting and painting. Shin, Kwon, and Ryu (2008) proposed a bottom-left-fill heuristic method for spatial planning of block assemblies and suggested a placement algorithm for blocks by differential evolution arrangement algorithm. Liu, Chua, and Wee (2011) proposed a simulation model which enabled multiple priority rules to be compared. Zheng, Jiang, and Chen (2012) proposed a mathematical programming model for spatial scheduling and used several heuristic spatial scheduling strategies (grid searching and genetic algorithm). Zhang and Chen (2012) proposed another mathematical programming model and proposed the agglomeration algorithm.This study presents a novel mixed integer programming (MIP) formulation to consider block rotations, symmetrical blocks, pre-existing blocks, load balancing and allocation of certain blocks to pre-determined workspace. The proposed MIP models were implemented by commercially available software, LINGO® and problems of various sizes are tested. The computational results show that the MIP model is extremely difficult to solve as the size of problems grows. To efficiently solve the problem, a two-stage heuristic algorithm has been proposed.Section 2 describes spatial scheduling problems and assumptions which are used in this study. Section 3 presents a mixed integer programming formulation. In Section 4, a two-stage heuristic algorithm has been proposed, including block dispatching priority rules and a diagonal fill space allocation heuristic method, which is modified from the bottom-left-fill space allocation method. Computational results are provided in Section 5. The conclusions are given in Section 6.2. Problem descriptionsThe ship design decides how to divide the ship into many smaller pieces. The metal sheets are cut, blast, bend and weld to build small blocks. These small blocks are assembled to bigger assembly blocks. During this shipbuilding process, all blocks have their earliest starting times which are determined from the previous operational step and due dates which are required by the next operational step. At each step, the blocks have their own shapes of various sizes and handling requirements. During the assembly, no block can overlap physically with others or overhang the boundary of workplace.The spatial scheduling problem can be defined as a problem to determine the optimal schedule of a given set of blocks and the layout of workplaces by designating the blocks’ workplace simultaneously. As the term implies, spatial scheduling pursues the optimal dynamic spatial layout schedule which can also satisfy traditional scheduling constraints. Dynamic spatial layout schedule can be including the spatial allocation issue, temporal allocation issue and resource allocation issue.An example of spatial scheduling is given in Fig. 2. There are 4 blocks to be allocated and scheduled in a rectangular workplace. Each block is shaded in different patterns. Fig. 2 shows the 6-day spatial schedule of four large blocks on a given workplace. Blocks 1 and 2 are pre-existed or allocated at day 1. The earliest starting times of blocks 3 and 4 are days 2 and 4, respectively. The processing times of blocks 1, 2 and 3 are 4, 2 and 4 days, respectively.The spatial schedule must satisfy the time and space constraints at the same time. There are many objectives in spatial scheduling, including the minimization of makespan, the minimum tardiness, the maximum utilization of spatial and non-spatial resources and etc. The objective in this study is to minimize the makespan and balance the workload over the workspaces.There are many constraints for spatial scheduling problems in shipbuilding, depending on the types of ships built, the operational strategies of the shop, organizational restrictions and etc. Some basic constraints are given as follows; (1) all blocks must be allocated on given workplaces for assembly processes and must not overstep the boundary of the workplace; (2) any block cannot overlap with other blocks; (3) all blocks have their own earliest starting time and due dates; (4) symmetrical blocks needs to be placed side-by-side in the same workspace. Fig. 3 shows how symmetrical blocks need to be assigned; (5) some blocks need to be placed in the designated workspace; (6) there can be existing blocks before the planning horizon; (7) workloads forworkplaces needs to be balanced as much as possible.In addition to the constraints described above, the following assumptions are made.(1) The shape of blocks and workplaces is rectangular.(2 )Once a block is placed in a workplace, it cannot be moved or removed from its location until the process is completed.(3 ) Blocks can be rotated at angles of 0° and 90° (see Fig. 4).(4) The symmetric blocks have the same sizes, are rotated at the same angle and should be placed side-by-side on the same workplace.(5) The non-spatial resources (such as personnel or equipment) are adequate.3. A mixed integer programming modelA MIP model is formulated and given in this section. The objective function is to minimize makespan and the sum of deviation from average workload per workplace, considering the block rotation, the symmetrical blocks, pre-existing blocks, load balancing and the allocation of certain blocks to pre-determined workspace.A workspace with the length LENW and the width WIDW is considered two-dimensional rectangular space. Since the rectangular shapes for the blocks have been assumed, a block can be placed on workspace by determining (x, y) coordinates, where 0 ⩽ x ⩽ LENW and 0 ⩽ y ⩽ WIDW. Hence, the dynamic layout of blocks on workplaces is similar to two-dimensional bin packing problem. In addition to the block allocation, the optimal schedule needs to be considered at the same time in spatial scheduling problems. Z axis is introduced to describe the time dimension. Then, spatial scheduling problem becomes a three-dimensional bin packing problem with various objectives and constraints.The decision variables of spatial scheduling problem are (x, y, z) coordinates of all blocks within athree-dimensional space whose sizes are LENW, WIDW and T in x, y and z axes, where T represents the planning horizon. This space is illustrated in Fig. 5.In Fig. 6, the spatial scheduling of two blocks into a workplace is illustrated as an example. The parameters p1 and p2 indicate the processing times for Blocks 1 and 2, respectively. As shown in z axis, Block 2 is scheduled after Block 1 is completed.4. A two-stage heuristic algorithmThe computational experiments for the MIP model in Section 3 have been conducted using a commercially available solver, LINGO®. Obtaining global optimum solutions is very time consuming, considering the number of variables and constraints. A ship is consisted of more than 8 hundred large blocks and the size of problem using MIP model is beyond today’s computational ability. A two-stage heuristic algorithm has been proposed using the dispatching priority rules and a diagonal fill method.4.1. Stage 1: Load balancing and sequencingPast research on spatial scheduling problems considers various priority rules. Lee et al. (1996) used a priorityrule for the minimum slack time of blocks. Cho et al. (2001) and Park et al. (2002) used the earliest due date. Shin et al. (2008) considered three dispatching priority rules for start date, finish date and geometric characteristics (length, breadth, and area) of blocks. Liu and Teng (1999) compared 9 different dispatching priority rules including first-come first-serve, shortest processing time, least slack, earliest due date, critical ratio, most waiting time multiplied by tonnage, minimal area residue, and random job selection. Zheng et al. (2012) used a dispatching rule of longest processing time and earliest start time.Two priority rules are used in this study to divide all blocks into groups for load balancing and to sequence them considering the due date and earliest starting time. Two priority rules are streamlined to load-balance and sequence the blocks into an algorithm which is illustrated in Fig. 7. The first step of the algorithm in this stage is to group the blocks based on the urgency priority. The urgency priority is calculated by subtracting the earliest starting time and the processing time from the due date for each block. The smaller the urgency priority, the more urgent the block needs to bed scheduled. Then all blocks are grouped into an appropriate number of groups for a reasonable number of levels in urgency priorities. Let g be this discretionary number of groups. There are g groups of blocks based on the urgency of blocks. The number of blocks in each group does not need to be identical.Blocks in each group are re-ordered grouped into as many subgroups as workplaces, considering the workload of blocks such as the weight or welding length. The blocks in each subgroup have the similar urgency and workloads. Then, these blocks in each subgroup are ordered in an ascending order of the earliest starting time. This ordering will be used to block allocations in sequence. The subgroup corresponds to the workplace.If block i must be processed at workplace w and is currently allocated to other workplace or subgroup than w, block i is swapped with a block at the same position of block i in an ascending order of the earliest starting time at its workplace (or subgroup). Since the symmetric blocks must be located on a same workplace, a similar swapping method can be used. One of symmetric blocks which are allocated into different workplace (or subgroups) needs to be selected first. In this study, we selected one of symmetric blocks whichever has shown up earlier in an ascending order of the earliest starting time at their corresponding workplace (or subgroup). Then, the selected block is swapped with a block at the same position of symmetric blocks in an ascending order of the earliest starting time at its workplace (or subgroups).4.2. Stage 2: Spatial allocationOnce the blocks in a workplace (or subgroup) are sequentially ordered in different urgency priority groups, each block can be assigned to workplaces one by one, and allocated to a specific location on a workplace. There has been previous research on heuristic placement methods. The bottom-left (BL) placement method was proposed by Baker, Coffman, and Rivest (1980) and places rectangles sequentially in a bottom-left most position. Jakobs (1996) used a bottom-left method that is combined with a hybrid genetic algorithm (see Fig.8). Liu and Teng (1999) developed an extended bottom-left heuristic which gives priority to downward movement, where the rectangles is only slide leftwards if no downward movement is possible. Chazele (1983) proposed the bottom-left-fill (BLF) method, which searches for lowest bottom-left point, holes at the lowest bottom-left point and then place the rectangle sequentially in that bottom-left position. If the rectangle is not overlapped, the rectangle is placed and the point list is updated to indicate new placement positions. If the rectangle is overlapped, the next point in the point list is selected until the rectangle can be placed without any overlap. Hopper and Turton (2000) made a comparison between the BL and BLF methods. They concluded that the BLF method algorithm achieves better assignment patterns than the BL method for Hopper’s example problems.Spatial allocation in shipbuilding is different from two-dimensional packing problem. Blocks have irregular polygonal shapes in the spatial allocation and blocks continuously appear and disappear since they have their processing times. This frequent placement and removal of blocks makes BLF method less effective in spatial allocation of large assembly block.In order to solve these drawbacks, we have modified the BLF method appropriate to spatial scheduling for large assembly blocks. In a workplace, since the blocks are placed and removed continuously, it is more efficient to consider both the bottom-left and top-right points of placed blocks instead of bottom-left points only. We denote it as diagonal fill placement (see Fig. 9). Since the number of potential placement considerations increases, it takes a bit more time to implement diagonal fill but the computational results shows that it is negligible.The diagonal fill method shows better performances than the BLF method in spatial scheduling problems. When the BLF method is used in spatial allocation, the algorithm makes the allocation of some blocks delayed until the interference by pre-positioned blocks are removed. It generates a less effective and less efficient spatial schedule. The proposed diagonal fill placement method resolve this delays better by allocating the blocks as soon as possible in a greedy way, as shown in Fig. 10. The potential drawbacks from the greedy approaches is resolved by another placement strategy to minimize the possible dead spaces, which will be explained in the following paragraphs.The BLF method only focused on two-dimensional bin packing. Frequent removal and placement of blocks in a workspace may lead to accumulation of dead spaces, which are small and unusable spaces among blocks. A minimal possible-dead space strategy has been used along with the BLF method. Possible-dead spaces are being generated over the spatial scheduling and they have less chance to be allocated for future blocks. The minimal possible-dead space strategy minimizes the potential dead space after allocating the following blocks (Chung, 2001 and Koh et al., 2008) by considering the 0° and 90° rotation of the block and allocating the following block for minimal possible-dead space. Fig. 11 shows an example of three possible-dead space calculations using the neighbor block search method. When a new scheduling block is considered to be allocated, the rectangular boundary of neighboring blocks and the scheduling blocks is searched. This boundary can be calculated by obtaining the smallest and the largest x and y coordinates of neighboring blocks and the scheduling blocks. Through this procedure, the possible-dead space can be calculated as shown in Fig.11. Considering the rotation of the scheduling blocks and the placement consideration points from the diagonal fill placement methods, the scheduling blocks will be finally allocated.In this two-stage algorithm, blocks tend to be placed adjacent to one of the alternative edges and their assignments are done preferentially to minimize fractured spaces.5. Computational resultsTo demonstrate the effectiveness and efficiency of the proposed MIP formulation and heuristic algorithm, the actual data about 800+ large assembly blocks from one of major shipbuilding companies has been obtainedand used. All test problems are generated from this real-world data.All computational experiments have been carried out on a personal computer with a Intel® Core™ i3-2100 CPU @ 3.10 GHz with 2 GB RAM. The MIP model in Section 3 has been programmed and solved using LINGO® version 10.0, a commercially available software which can solve linear and nonlinear models. The proposed two-stage heuristic algorithm has been programmed in JAVA programming language.Because our computational efforts to obtain the optimal solutions for even small problems are more than significant, the complexity of SPP can be recognized as one of most difficult and time consuming problems.Depending on the scaling factor α in objective function of the proposed MIP formulation, the performance of the MIP model varies significantly. Setting α less than 0.01 makes the load balancing capability to be ignored from the optimal solution in the MIP model. For computational experiments in this study, the results with the scaling factor set to 0.01 is shown and discussed. The value needs to be fine-turned to obtain the desirable outcomes.Table 1 shows a comparison of computational results and performance between the MIP models andtwo-stage heuristic algorithm. As shown in Table 1, the proposed two-stage heuristic algorithm finds thenear-optimal solutions for medium and large problems very quickly while the optimal MIP models was not able to solve the problems of medium or large sizes due to the memory shortage on computers. It is observed that the computational times for the MIP problems are rapidly growing as the problem sizes increases. The test problems in Table 1 have 2 workplaces.Table 1.Computational results and performance between the MIP models and two-stage heuristic algorithm.The MIP model Two-stage heuristic algorithmNumber of blocksOptimal solution Time (s) Best known solution Time (s)10 12.360 1014.000 12.360 0.02620 22.380a 38250.000 21.380 0.07830 98.344a 38255.000 30.740 0.21850 ––53.760 0.719100 ––133.780 2.948200 ––328.860 12.523The MIP model Two-stage heuristic algorithmNumber of blocksOptimal solution Time (s) Best known solution Time (s)300 ––416.060 40.154400 ––532.360 73.214Best feasible solution after 10 h in Global Solver of LINGO®.Full-size tableTable optionsView in workspaceDownload as CSVThe optimal solutions for test problems with more than 50 blocks in Table 1 have been not obtained even after 24 h. The best known feasible solutions after 10 h for the test problems with 20 blocks and 30 blocks are reported in Table 1. It is observed that the LINGO® does not solve the nonlinear constraints very well as shown in Table 1. For very small problem with 10 blocks, the LINGO® was able to achieve the optimal solutions. For slightly bigger problems, the LINGO® took significantly more time to find feasible solutions. From this observation, the approaches to obtain the lower bound through the relaxation method and upper bounds are significant required in future research.In contrary, the proposed two-stage heuristic algorithm was able to find the good solutions very quickly. For the smallest test problem with 10 blocks, it was able to find the optimal solution as well. The computational times are 1014 and 0.026 s, respectively, for the MIP approach and the proposed algorithm. Interestingly, the proposed heuristic algorithm found significantly better solutions in only 0.078 and 0.218 s, respectively, for the test problems with 20 and 30 blocks. For these two problems, the LINGO® generates the worse solutions than the heuristics after 10 h of computational times. The symbol ‘–’ in Table 1 indicates that the Global Solver of LINGO® did not find the feasible solutions.Another observation on the two-stage heuristic algorithms is the robust computational times. The computation times does not change much as the problem sizes increase. It is because the simple priority rules are used without considering many combinatorial configurations.Fig. 12 shows partial solutions of test problems with 20 and 30 blocks on 2 workplaces. The purpose of Fig. 12 is to show the progress of production planning generated by the two-stage heuristic algorithm. Two workplaces are in different sizes of (40, 30) and (35, 40), respectively.6. ConclusionsAs global warming is expected to open a new way to transport among continent through North Pole Sea and to expedite the oceans more aggressively, the needs for more ships and ocean plants are forthcoming. The shipbuilding industries currently face increased diversity of assembly blocks in limited production shipyard. Spatial scheduling for large assembly blocks holds the key role in successful operations of the shipbuilding。
船舶设计论文中英文外文翻译文献

船舶设计论文中英文外文翻译文献XXX shipbuilding。
with a single large container vessel consisting of approximately 1.5 n atomic components in a n hierarchy。
this n is considered a XXX involves a distributed multi-agent n that runs on top of PVM.2 XXXShip XXX process。
as well as the final product's performance and safety。
nal design XXX-consuming and often fail to consider all the complex factors XXX。
there is a need for a more XXX designers.3 The Role of HPCN in Ship Design nHPCN。
or high-performance computing and orking。
has the potential to XXX utilizing the massive parallel processing power of HPCN。
designers XXX changes。
cing the time and cost of thedesign process。
nally。
HPCN can handle the complex XXX。
XXX.4 XXX XXX of the HPCN n Support ToolThe XXX ship designers is implemented as a distributed multi-agent n that runs on top of PVM。
有关船舶的文章 英文版范文
有关船舶的文章英文版范文The Majesty and Complexity of Maritime Vessels.The vast ocean, a mysterious and unexplored frontier, has always fascinated humanity. Since the dawn of civilization, mankind has dreamed of conquering the waves and traversing the vast blue. This dream has been realized through the creation and evolution of maritime vessels, which have played a pivotal role in shaping the world we know today.Ships, the epitome of maritime transportation, have a rich and diverse history. From the humble wooden dhows that plied the trade routes of the ancient world to the massive container ships that traverse the globe today, thesevessels have evolved to meet the changing needs of humanity. Each ship, whether a cargo carrier, a passenger liner, or a naval warship, is a testament to the ingenuity and craftsmanship of its makers.The design and construction of a ship are intricate and complex processes. The hull, the very backbone of the vessel, must be sturdy and resilient, able to withstand the rigors of the ocean. Materials such as steel and aluminum are used to create a strong yet lightweight structure, while advanced technologies like hydrodynamics and computer-aided design ensure that the ship's shape is optimized for speed and efficiency.The propulsion system.。
船舶设计论文中英文外文翻译文献
中英文外文翻译文献Ship Design OptimizationThis contribution is devoted to exploiting the analogy between a modern manufacturing plant and a heterogeneous parallel computer to construct a HPCN decision support tool for ship designers. The application is a HPCN one because of the scale of shipbuilding - a large container vessel is constructed by assembling about 1.5 million atomic components in a production hierarchy. The role of the decision support tool is to rapidly evaluate the manufacturing consequences of design changes. The implementation as a distributed multi-agent application running on top of PVM is described1 Analogies between Manufacturing and HPCNThere are a number of analogies between the manufacture of complex products such as ships, aircraft and cars and the execution of a parallel program. The manufacture of a ship is carried out according to a production plan which ensures that all the components come together at the right time at the right place. A parallel computer application should ensure that the appropriate data is available on the appropriate processor in a timely fashion.It is not surprising, therefore, that manufacturing is plagued by indeterminacy exactly as are parallel programs executing on multi-processor hardware. This has caused a number of researchers in production engineering to seek inspiration in otherareas where managing complexity and unpredictability is important. A number of new paradigms, such as Holonic Manufacturing and Fractal Factories have emerged [1,2] which contain ideas rather reminiscent of those to be found in the field of Multi- Agent Systems [3, 4].Manufacturing tasks are analogous to operations carried out on data, within the context of planning, scheduling and control. Also, complex products are assembled at physically distributed workshops or production facilities, so the components must be transported between them. This is analogous to communication of data between processors in a parallel computer, which thus also makes clear the analogy between workshops and processors.The remainder of this paper reports an attempt to exploit this analogy to build a parallel application for optimizing ship design with regard to manufacturing issues.2 Shipbuilding at Odense Steel ShipyardOdense Steel Shipyard is situated in the town of Munkebo on the island of Funen. It is recognized as being one of the most modern and highly automated in the world. It specializes in building VLCC's (supertankers) and very large container ships. The yard was the first in the world to build a double hulled supertanker and is currently building an order of 15 of the largest container ships ever built for the Maersk line. These container ships are about 340 metres long and can carry about 7000 containers at a top speed of 28 knots with a crew of 12.Odense Steel Shipyard is more like a ship factory than a traditional shipyard. The ship design is broken down into manufacturing modules which are assembled and processed in a number of workshops devoted to, for example, cutting, welding and surface treatment. At any one time, up to 3 identical ships are being built and a new ship is launched about every 100 days.The yard survives in the very competitive world of shipbuilding by extensive application of information technology and robots, so there are currently about 40 robots at the yard engaged in various production activities. The yard has a commitment to research as well, so that there are about 10 industrial Ph.D. students working there, who are enrolled at various engineering schools in Denmark.3 Tomorrow's Manufacturing SystemsThe penetration of Information Technology into our lives will also have its effect in manufacturing industry. For example, the Internet is expected to become thedominant trading medium for goods. This means that the customer can come into direct digital contact with the manufacturer.The direct digital contact with customers will enable them to participate in the design process so that they get a product over which they have some influence. The element of unpredictability introduced by taking into account customer desires increases the need for flexibility in the manufacturing process, especially in the light of the tendency towards globalization of production. Intelligent robot systems, such as AMROSE, rely on the digital CAD model as the primary source of information about the work piece and the work cell [5,6].This information is used to construct task performing, collision avoiding trajectories for the robots, which because of the high precision of the shipbuilding process, can be corrected for small deviations of the actual world from the virtual one using very simple sensor systems. The trajectories are generated by numerically solving the constrained equations of motion for a model of the robot moving in an artificial force field designed to attract the tool centre to the goal and repell it from obstacles, such as the work piece and parts of itself. Finally, there are limits to what one can get a robot to do, so the actual manufacturing will be performed as a collaboration between human and mechatronic agents.Most industrial products, such as the windmill housing component shown in Fig. 1, are designed electronically in a variety of CAD systems.Fig. 1. Showing the CAD model for the housing of a windmill. The model, made using Bentley Microstation, includes both the work-piece and task-curve geometries.4 Today's Manufacturing SystemsThe above scenario should be compared to today's realities enforced by traditional production engineering philosophy based on the ideas of mass production introduced about 100 years ago by Henry Ford. A typical production line has the same structure as a serial computer program, so that the whole process is driven by production requirements. This rigidity is reflected on the types of top-down planning and control systems used in manufacturing industry, which are badly suited to both complexity and unpredictability.In fact, the manufacturing environment has always been characterized by unpredictability. Today's manufacturing systems are based on idealized models where unpredictability is not taken into account but handled using complex and expensive logistics and buffering systems.Manufacturers are also becoming aware that one of the results of the top-down serial approach is an alienation of human workers. For example, some of the car manufacturers have experimented with having teams of human workers responsible for a particular car rather than performing repetitive operations in a production line. This model in fact better reflects the concurrency of the manufacturing process than the assembly line.5 A Decision Support Tool for Ship Design OptimizationLarge ships are, together with aircraft, some of the most complex things ever built. A container ship consists of about 1.5 million atomic components which are assembled in a hierarchy of increasingly complex components. Thus any support tool for the manufacturing process can be expected to be a large HPCN application.Ships are designed with both functionality and ease of construction in mind, as well as issues such as economy, safety, insurance issues, maintenance and even decommissioning. Once a functional design is in place, a stepwise decomposition of the overall design into a hierarchy of manufacturing components is performed. The manufacturing process then starts with the individual basic building blocks such as steel plates and pipes. These building blocks are put together into ever more complex structures and finally assembled in the dock to form the finished ship.Thus a very useful thing to know as soon as possible after design time are the manufacturing consequences of design decisions. This includes issues such as whether the intermediate structures can actually be built by the available production facilities, the implications on the use of material and whether or not the production can be efficiently scheduled [7].Fig.2. shows schematically how a redesign decision at a point in time during construction implies future costs, only some of which are known at the time. Thus a decision support tool is required to give better estimates of the implied costs as early as possible in the process.Simulation, both of the feasibility of the manufacturing tasks and the efficiency with which these tasks can be performed using the available equipment, is a very compute-intense application of simulation and optimization. In the next section, we describe how a decision support tool can be designed and implemented as a parallel application by modeling the main actors in the process as agents.Fig.2. Economic consequences of design decisions. A design decision implies a future commitment of economic resources which is only partially known at design time.6 Multi-Agent SystemsThe notion of a software agent, a sort of autonomous, dynamic generalization of an object (in the sense of Object Orientation) is probably unfamiliar to the typical HPCN reader in the area of scientific computation. An agent possesses its own beliefs, desires and intentions and is able to reason about and act on its perception of other agents and the environment.A multi-agent system is a collection of agents which try to cooperate to solve some problem, typically in the areas of control and optimization. A good example is the process of learning to drive a car in traffic. Each driver is an autonomous agent which observes and reasons about the intentions of other drivers. Agents are in fact a very useful tool for modeling a wide range of dynamical processes in the real world, such as the motion of protein molecules [8] or multi-link robots [9]. For other applications, see [4].One of the interesting properties of multi-agent systems is the way global behavior of the system emerges from the individual interactions of the agents [10]. The notion of emergence can be thought of as generalizing the concept of evolution in dynamical systems.Examples of agents present in the system are the assembly network generator agent which encapsulates knowledge about shipbuilding production methods for planning assembly sequences, the robot motion verification agent, which is a simulator capable of generating collision-free trajectories for robots carrying out their tasks, the quantity surveyor agent which possesses knowledge about various costs involved in the manufacturing process and the scheduling agent which designs a schedule for performing the manufacturing tasks using the production resources available.7 Parallel ImplementationThe decision support tool which implements all these agents is a piece of Object- Oriented software targeted at a multi-processor system, in this case, a network of Silicon Graphics workstations in the Design Department at Odense Steel Shipyard. Rather than hand-code all the communication between agents and meta-code for load balancing the parallel application, abstract interaction mechanisms were developed. These mechanisms are based on a task distribution agent being present on each processor. The society of task distribution agents is responsible for all aspects of communication and migration of tasks in the system.The overall agent system runs on top of PVM and achieves good speedup andload balancing. To give some idea of the size of the shipbuilding application, it takes 7 hours to evaluate a single design on 25 SGI workstations.From:Applied Parallel Computing Large Scale Scientific and Industrial Problems Lecture Notes in Computer Science, 1998, Volume 1541/1998, 476-482, DOI: 10.1007/BFb0095371 .中文翻译:船舶设计优化这一贡献致力于开拓类比现代先进制造工厂和一个异构并行计算机,构建了一种HPCN 决策支援工具给船舶设计师。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中英文资料外文翻译文献A Simple Prediction Formula of Roll Damping of Conventional Cargo Ships on the Basis of lkeda's Method and Its LimitationSince the roll damping of ships has significant effects of viscosity, it is difficult to calculate it theoretically. Therefore, experimental results or some prediction methods are used to get the roll damping in design stage of ships. Among some prediction methods, Ikeda’s one is widely used in many ship motion computer programs. Using the method, the roll damping of various ship hulls with various bilge keels can be calculated to investigate its characteristics. To calculate the roil damping of each ship, detailed data of the ship are needed to input. Therefore, a simpler prediction method is expected in primary design stage. Such a simple method must be useful to validate the results obtained by a computer code to predict it on the basis of Ikeda,s method, too. On the basis of the predicted roll damping by Ikeda’s method for various ships, a very simple prediction formula of the roll damping of ships is deduced in the present paper. Ship hull forms are systematically changed by changing length, beam, draft, mid-ship sectional coefficient and prismatic coefficient. It is found, however, that this simple formula can not be used for ships that have high position of the center of gravity. A modified method to improve accuracy for such ships is proposed.Key words: Roll damping, simple prediction formula, wave component, eddy component, bilge keel component.IntroductionIn 1970s, strip methods for predicting ship motions in 5-degree of freedoms in waves have been established. The methods are based on potential flow theories (Ursell-Tasai method, source distribution method and so on), and can predict pitch, heave, sway and yaw motions of ships in waves in fairly good accuracy. In roll motion, however, the strip methods do not work well because of significant viscous effects on the roll damping. Therefore, some empirical formulas or experimental dataare used to predict the roll damping in the strip methods.To improve the prediction of roll motions by these strip methods, one of the authors carried out a research project to develop a roll damping prediction method which has the same concept and the same order of accuracy as the strip methods which are based on hydrodynamic forces acting on strips. The review of the prediction method was made by Himeno [5] and Ikeda [6,7] with the computer program.The prediction method, which is now called Ikeda’s method, divides the roll damping into the frictional (BF), the wave (Bw),the eddy (Be) and the bilge keel (Bbk) components at zero forward speed, and at forward speed, the lift (Bi) is added. Increases of wave and friction components due to advance speed are also corrected on the basis of experimental results. Then the roll damping coefficient B44 (= roll damping moment (kgfm)/roll angular velocity (rad/sec)) can be expressed as follows: B44 B bk (1)At zero forward speed, each component except the friction and lift components are predicted for each cross section with unit length and the predicted values are summed up along the ship length. The friction component is predicted by Kato’s formula for a three-dimensional ship shape. Modification functions for predicting the forward speed effects on the roll damping components are developed for the friction, wave and eddy components. The computer program of the method was published, and the method has been widely used.For these 30 years, the original Ikeda’s method developed for conven tional cargo ships has been improved to apply many kinds of ships, for examples, more slender and round ships, fishing boats, barges, ships with skegs and so on. The original method is also widely used. However, sometimes, different conclusions of roll mot ions were derived even though the same Ikeda’s method was used in the calculations. Then, to check the accuracy of the computer programs of the same Ikeda’s method, a more simple prediction method with the almost same accuracy as the Ikeda’s original one h as been expected to be developed. It is said that in design stages of ships, Ikeda’s method is too complicated to use. To meet these needs, a simple roll damping prediction method was deduced by using regression analysis [8].Previous Prediction FormulaThe simple prediction formula proposed in previous paper can not be used for modem ships that have high position of center of gravity or long natural roll period such as large passenger ships with relatively flat hull shape. In order to investigate its limitation, the authors compared the result of this prediction method with original Ikeda’s one while out of its calculating limitation. Fig. 1 shows the result of the comparison with their method of roll damping. The upper one is on the condition that the center of gravity is low and the lower one on the condition that the center of gravity is high.From this figure, the roll damping estimated by this prediction formula is in good agreement with the roll damping calculated by the Ikeda’s method for low positi on of center of gravity, but the error margin grows for the high position of center of gravity. The results suggest that the previous prediction formula is necessary to be revised. Methodical Series ShipsModified prediction formula will be developed on the basis of the predicted results by Ikeda’s method using the methodical series ships. This series ships are constructed based on the Taylor Standard Series and its hull shapes are methodically changed by changing length, beam, draft, midship sectional coefficient and longitudinal prismatic coefficient. The geometries of the series ships are given by the following equations. Proposal of New Prediction Method of Roll DampingIn this chapter, the characteristics of each component of the roll damping, the frictional, the wave, the eddy and the bilge keel components at zero advanced speed, are discussed, and a simple prediction formula of each component is developed.As well known, the wave component of the roll damping for a two-dimensional cross section can be calculated by potential flow theories in fairly good accuracy. In Ikeda's method, the wave damping of a strip section is not calculated and the calculated values by any potential flow theories are used as the wave damping.reason why viscous effects are significant in only roll damping can be explained as follows. Fig. 4 shows the wave component of the roll damping for 2-D sections calculated by a potential flow theory.ConclusionsA simple prediction method of the roll damping of ships is developed on the basis of the Ikeda’s original prediction method which was developed in the same concept as a strip method for calculating ship motions in waves. Using the data of a ship, B/d, Cb,Cm, OG/d, G),bBK/B, Ibk/Lpp,(pa, the roll damping of a ship can be approx imately predicted. Moreover, the limit of application of Ikeda’s prediction method to modern ships that have buttock flow stern is demonstrated by the model experiment. The computer program of the method can be downloaded from the Home Page of Ikeda’s Labo (AcknowledgmentsThis work was supported by the Grant-in Aid for Scientific Research of the Japan Society for Promotion of Science (No. 18360415).The authors wish to express sincere appreciation to Prof. N. Umeda of Osaka University for valuable suggestions to this study.References五、Y. Ikeda, Y. Himeno, N. Tanaka, On roll damping force of shipEffects of friction of hull and normal force of bilge keels, Journal of the Kansai Society of Naval Architects 161 (1976) 41-49. (in Japanese)六、Y. Ikeda, K. Komatsu, Y. Himeno, N. Tanaka, On roll damping force of ship~Effects of hull surface pressure created by bilge keels, Journal of the Kansai Society of Naval Architects 165 (1977) 31-40. (in Japanese)七、Y. Ikeda, Y. Himeno, N. Tanaka, On eddy making component of roll damping force on naked hull, Journal of the Society of Naval Architects 142 (1977) 59-69. (in Japanese)八、Y. Ikeda, Y. Himeno, N. Tanaka, Components of roll damping of ship at forward speed, Journal of the Society of Naval Architects 143 (1978) 121-133. (in Japanese) 九、Y. Himeno, Prediction of Ship Roll Damping一State of the Art, Report of Department of Naval Architecture & Marine Engineering, University of Michigan, No.239, 1981.十、Y. Ikeda, Prediction Method of Roll Damping, Report of Department of Naval Architecture, University of Osaka Prefecture, 1982.十一、Y. Ikeda, Roll damping, in: Proceedings of 1stSymposium of Marine Dynamics Research Group, Japan, 1984, pp. 241-250. (in Japanese)十二、Y. Kawahara, Characteristics of roll damping of various ship types and as imple prediction formula of roll damping on the basis of Ikeda’s method, in: Proceedings of the 4th Asia-Pacific Workshop on Marine Hydrodymics, Taipei, China, 2008,pp. 79-86.十三、Y. Ikeda, T. Fujiwara, Y. Himeno, N. Tanaka, Velocity field around ship hull in roll motion, Journal of the Kansai Society of Naval Architects 171 (1978) 33-45. (in Japanese)十四、N. Tanaka, Y. Himeno, Y. Ikeda, K. Isomura,Experimental study on bilge keel effect for shallow draftship, Journal of the Kansai Society of Naval Architects 180 (1981) 69-75. (in Japanese)常规货船的横摇阻尼在池田方法基础上的一个简单预测方法及其局限性摘要:由于船的横摇阻尼对其粘度有显着的影响,所以很难在理论上计算。