实时环境下多目标的路径选择模型
公路的路线选择和优化的方法及依据

公路的路线选择和优化的方法及依据公路的路线选择和优化是一项非常重要的工作,它不仅关系到公路交通的安全和畅通,还直接影响着城市的发展和社会经济的繁荣。
针对这一重要问题,本文将从路线选择和优化的方法及依据两个方面展开阐述。
一、路线选择的方法及依据(1)地理信息系统(GIS)技术地理信息系统是一种将地理空间信息与属性信息相结合的技术,它可以通过地图、卫星影像等数据进行空间分析,帮助人们找出最佳的路线选择。
借助GIS技术,可以进行环境评价、地形分析、交通状况分析等,从而找出最适合的路线。
(2)多目标优化模型多目标优化模型是一种数学模型,能够将多个目标进行量化,然后通过数学求解找出在多个目标下的最优解。
在路线选择中,可以考虑到交通拥堵、环境影响、工程成本等多个目标,通过多目标优化模型找出最佳的路线选择。
(3)专家决策在一些复杂的情况下,可以请相关领域的专家进行决策,他们可以根据自己的专业知识和经验,给出最合理的路线选择建议。
(1)交通需求交通需求是路线选择的首要考虑因素,要根据周边地区的交通需求、人口密度、产业分布等因素,确定最适合的路线。
(2)环境影响评价在路线选择过程中,需要对路线可能带来的环境影响进行评价,包括土地利用、生态保护、水土流失等方面,选择对环境影响最小的路线。
(3)地形条件地形条件是影响路线选择的重要因素之一,需要考虑地势高低、水系分布、土质情况等,选择地势平坦、易于施工的路线。
1.路线优化的方法(1)遗传算法遗传算法是一种启发式优化算法,模拟自然界的生物进化过程,通过种群进化、交叉、变异等操作,找出最优解。
在路线优化中,可以将路线的设计参数作为个体,通过遗传算法找到最优的设计参数组合,实现路线的优化。
(2)模拟退火算法(3)蚁群算法蚁群算法是一种仿生优化算法,模拟蚂蚁在寻找食物过程中的行为,通过信息素的释放和蒸发来实现最优化搜索。
在路线优化中,可以将路线的选择问题转化为蚁群算法中的路径选择问题,通过蚁群算法找到最佳的路线选择。
带时间窗的多目标配送线路选择问题的目标规划模型
通过将客户的等待时间最小作为一个 目标 函数 , 就可 以改进客 户的满意度 。
客户送 货 , 流中心 和每个 客户的位置一定 , 物 客户的需求量一
定, 且客户要求将需求货物 送到的时间窗也一定 , 每台配送车
【 收稿日期]0 7 0 ' 0 2 0 — 7 1 【 基金项目】 国家 自然科学基金资助项 目(0 0 0 0 7 3 1 1) 【 作者简介】 韩世莲(9 0 )女 , 17 一, 山西祁县人 , 博士 , 师。 讲 研究方 向: 物流系统分析与优化
A src:Bsdo emenn s me a igi n e r cpe f bet ln igtepp r s bi e na bet l nn oe b tat ae nt a i o c t r in me dt i ilo jcpa nn,h ae t l hs l er jc pa igm d l h g fu o w t t a h p n o e a s ai o n f e l— beterue e co i m id wcnt iti odrofllte nm zdt nprcs sotst nprt n o et 0 t t ojci t l t n tt ewno os ansn re t uflh ii asotot hr tr so me ds rs rh mu i v o se i w h i r i mi e r , e a t i a h t
面向多目标的机器人路径规划算法

面向多目标的机器人路径规划算法随着科技的进步,人们对机器人应用的需求越来越大,尤其是在生产和物流方面,机器人可以帮助降低劳动成本,提高工作效率,同时还能减少人为操作的错误率。
在机器人的应用中,路径规划算法是非常关键的技术,因为只有得到一个合理的路径规划算法,机器人的运动才能更加高效、安全地完成任务。
本文将会介绍面向多目标的机器人路径规划算法,包括其背景、概念、算法、应用等方面的问题。
一、背景机器人的路径规划算法是指在给定的环境下,求解机器人从起点到终点的最佳路径。
其中,最佳路径包括三个方面的含义:一是路径的长度要尽可能的短,二是要保证路径的安全,不能与障碍物发生碰撞,三是要考虑多个目标点的情况下,对路径的优化问题。
通常,在机器人的路径规划问题中,最难的是保证路径的可行性和正确性。
因此,如何在复杂环境下求解机器人的最优路径问题,是一个极具挑战性的问题。
二、概念面向多目标的机器人路径规划算法,是指在保证机器人在运动过程中遵循多个目标点的前提下,寻找一条最优路径的算法。
在多目标路径规划算法中,通常需要考虑以下三个问题:1.多目标点的选择问题在多目标路径规划算法中,如果无限定地添加目标点,并不能保证找到最优路径。
因此,需要根据实际问题的情况,选择合适的目标点进行路径规划。
一般来说,在选择目标点时,需要考虑目标点之间的距离、目标点的数量、作业顺序等因素。
2.路径规划问题的转换问题机器人运动的实际问题中,机器人的轨迹并非一个平滑的曲线,而是一个由各个小段构成的连续路径。
因此,需要将整个多目标路径规划问题,转化为子问题的路径规划问题,然后在子问题的基础上进行求解。
3.优化问题的求解问题在多目标路径规划问题中,有时需要满足多个约束条件。
例如,路径的长度要尽可能的短,但是又不允许与障碍物相碰撞。
因此,在多目标路径规划问题中,需要解决复杂的优化问题,以求得满足约束条件的最优解。
三、算法在现有的多目标路径规划算法中,主要分为两类:基于网格图的算法和基于采样的搜索算法。
救援车辆多目标实时路径规划模型
救援车辆多目标实时路径规划模型1. 引言1.1 背景救援车辆多目标实时路径规划模型是一种应用于救援行业的关键技术,可以帮助救援车辆在紧急情况下高效地到达多个目标地点。
随着城市化进程的加快,交通拥堵、交通事故等问题也日益严重,给救援工作带来了很大挑战。
传统的路径规划方法往往只考虑单一目标的情况,无法很好地适应多目标的复杂情况。
研究救援车辆多目标实时路径规划模型具有重要意义。
通过优化路径规划,可以有效减少救援车辆的行驶时间,提高救援效率,减少损失。
该模型还可以帮助救援人员更好地协调救援工作,提高应对突发事件的能力。
在当前科技发展迅速的背景下,利用先进的算法和技术,研究救援车辆多目标实时路径规划模型,不仅可以提升救援工作的效率和质量,还可以为相关研究领域提供更深入的探索和应用。
对于救援车辆多目标实时路径规划模型的研究具有重要的现实意义和实用价值。
1.2 研究目的【研究目的】:救援车辆多目标实时路径规划模型的研究目的主要包括以下几个方面:1. 提高救援效率:通过设计合理的路径规划模型,能够有效提高救援车辆的调度效率和行驶效率,使得救援车辆能够更快速地到达事故或灾害现场,从而最大程度地减少伤亡和财产损失。
2. 优化资源配置:通过准确的路径规划,可以避免资源浪费和重复调度,实现资源的最优配置,提高救援效率同时降低成本。
3. 提高道路使用效率:救援车辆需要快速通行道路,而路况的复杂多变性可能会导致交通拥堵和延误。
设计合理的路径规划模型可以提高道路的使用效率,减少交通拥堵和延误。
4. 兼顾多目标需求:救援车辆在执行任务时可能需要兼顾多个目标,如尽快到达现场、避免拥堵、保证交通安全等。
本研究旨在设计一种能够充分考虑多目标需求的路径规划模型,以提高救援车辆的整体执行效率和综合效益。
1.3 研究意义救援车辆多目标实时路径规划模型的研究意义在于提高救援工作的效率和准确性。
随着人口的增多和城市的发展,在应对突发事件时需要救援车辆快速到达事发现场并进行救援操作。
救援车辆多目标实时路径规划模型
救援车辆多目标实时路径规划模型随着城市化进程的加快和交通运输业的快速发展,城市中的交通拥堵、交通事故等问题逐渐凸显。
在应对突发事件、救援任务等情况下,救援车辆需要快速到达目的地,而不同救援车辆之间可能有不同的优先级、速度和路线需求,因此需要一个多目标实时路径规划模型来协调多辆救援车辆的路径规划,以实现最优的救援效果。
本文基于该问题提出了一个救援车辆多目标实时路径规划模型,主要包括以下几个部分:(1) 救援车辆路径规划的目标:考虑到救援车辆的紧急性和效率,将路径规划的目标划分为多个方面,包括最短时间、最短距离、最小交通拥堵等多个目标;(2) 救援车辆多目标实时路径规划模型的构建:建立多目标实时路径规划模型,通过综合考虑救援车辆的不同目标和约束条件,实现多辆救援车辆的实时路径规划;(3) 实例分析:通过实例分析,验证所提出的多目标实时路径规划模型的有效性和实用性。
在实际救援任务中,救援车辆需要实现快速到达目的地的目标,同时考虑到救援车辆的数量、速度、紧急程度等因素,可将救援车辆路径规划的目标进行如下划分:1. 最短时间:救援车辆需要在最短的时间内到达目的地,以最大限度减少救援时间。
3. 最小交通拥堵:救援车辆需要选择绕开交通拥堵的路线,以最大限度减少行驶时间和延误。
4. 最优路径:综合考虑上述多个因素,以实现最优的路径规划目标。
基于上述救援车辆路径规划的目标,建立救援车辆多目标实时路径规划模型。
假设有n辆救援车辆需要同时到达不同目的地,目标集合为{目标1,目标2,…,目标m},约束条件集合为{约束1,约束2,…,约束k},则救援车辆多目标实时路径规划模型可以表示为如下形式:min f(x) = (f1(x), f2(x), …, fm(x))s.t. g1(x) ≤ 0, g2(x) ≤ 0, ..., gk(x) ≤ 0fi(x)为第i个目标函数,gj(x)为第j个约束条件,x为决策变量,表示救援车辆的路径选择。
非战争军事行动装备保障资源运输方式选择模型
( t +1 )= ( £ +1 ) I ( t +1 )I ( 5 )
往不是时变的。所以 , 其选择误差越来越 大。人工神经 网络 理论的发展和应 用 , 为解决 上述问题 提供 了可能 。一 方面 , 神经 网络具有 良好 的非线性 品质 , 灵活 而有效 的学 习方式 ,
收 稿 日期 : 2 0 1 3— 0 6—1 6
作者简介 : 杨 晓段 ( 1 9 6 4 一) , 女, 硕士 , 副教授 , 主要从事新概念武器 、 装备保障研究。
3 6
四 川 兵 工 学 报
式( 1 ) 中,
h t t p : / / s c b g . j o l l r s  ̄ r v . c o n r /
分析过影 响运输道路选择 的因素 , 可知在实 际的非战争军事 行 动装备保 障资源调 配中 , 面对道路选择时要求达 到的 目标 不止一个 , 如运量要大 、 运输 时效要 高 、 运输安 全性要好 等 目 标, 所 以, 对 比2种方法 , 多 目标规划方法更 为合适建立道路
选择模型 。
∑ ∑ ∑ 口 口 0
1 ∑6 > 0
… ∑ : 0
( 7)
。
AP =
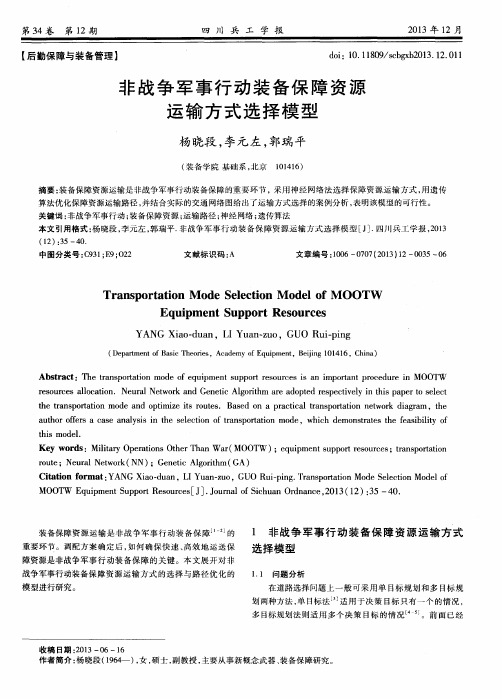
图1 双 向 联 想 记 忆神 经 网 络
6
其 巾, 向 量 A 的分 量 a 。 , a , …, a 一, a 神 经 元 为 目标
1∑
计算向量 A新 旧状态差异 占 :
Eq ui p me n t S up po r t Re s o ur c e s
YANG Xi a o — d u a n,LI Yu a n — Z U O,GUO Ru i — p i n g
救援车辆多目标实时路径规划模型

救援车辆多目标实时路径规划模型随着城市化进程的加快,交通拥堵、突发事件频发成为城市管理的重要问题。
在面对突发事件时,如火灾、交通事故、自然灾害等,救援车辆的调度和路径规划是非常关键的问题。
救援车辆多目标实时路径规划模型就是为了解决这个问题而产生的,其目的是通过合理的路径规划,使救援车辆能够尽快到达目的地,并且在途中能够避开交通拥堵、找到最短的路径,以提高救援效率和成功率。
救援车辆路径规划是一个复杂的问题,需要充分考虑交通状况、道路条件、目的地位置等多个因素。
而且救援车辆可能需要同时处理多个目标,比如同时救援不同地点的事故现场、灾难现场等。
传统的路径规划方法已经无法满足实际需求,需要针对这一问题提出新的路径规划模型。
救援车辆多目标实时路径规划模型主要包括以下几个关键要素:1. 多目标优化:考虑到救援车辆可能需要同时处理多个目标,需要建立一个多目标优化模型。
该模型可以根据不同目标的紧急程度、距离、交通状况等因素进行优化,以确定最合理的路径规划方案。
2. 实时路径规划:救援车辆需要根据实时的交通状况和目的地情况进行路径规划。
需要建立一个实时路径规划模型,能够及时调整路径,以适应不断变化的环境。
3. 交通预测模型:基于历史数据和实时数据,建立交通预测模型,能够准确预测不同时段和不同地点的交通状况。
这样可以帮助救援车辆选择最佳的路径,避开交通拥堵。
4. GIS技术支持:利用GIS技术,进行地理信息的管理和分析,能够帮助救援车辆更精准地确定目的地的位置,并进行路径规划。
在实际应用中,上述要素可以相互配合,形成一个完整的救援车辆多目标实时路径规划模型。
这样的模型可以有效提高救援效率,减少交通拥堵带来的延误,提高救援成功率。
救援车辆多目标实时路径规划模型的应用场景非常广泛。
在城市管理中,可以用于交通事故救援、城市火灾救援、自然灾害救援等方面。
在医疗卫生领域,也可以用于医疗救援车辆的路径规划,以最快的速度将病人送往医院。
疏散路线规划中的多目标优化问题探讨
疏散路线规划中的多目标优化问题探讨一、疏散路线规划的概念与重要性疏散路线规划是指在紧急情况下,如火灾、地震、袭击等,为确保人员安全、快速地撤离危险区域,而进行的路线设计和优化。
这一规划不仅关系到人员的生命安全,也是城市管理和公共安全的重要组成部分。
有效的疏散路线规划可以显著减少紧急情况下的伤亡和损失。
1.1 疏散路线规划的目标疏散路线规划的主要目标包括:- 最小化疏散时间:确保人员能够在最短的时间内撤离到安全区域。
- 均衡疏散流量:避免某些路线或区域因疏散人数过多而导致拥堵。
- 考虑疏散成本:在满足安全的前提下,尽量降低疏散过程中的资源消耗。
- 应对不确定性:在规划中考虑可能的不确定性因素,如路线损坏、交通管制等。
1.2 疏散路线规划的应用场景疏散路线规划的应用场景广泛,包括但不限于:- 建筑物内部疏散:如商场、学校、办公楼等人员密集场所的紧急疏散。
- 城市区域疏散:在自然灾害或大型活动结束后的城市区域疏散。
- 特殊事件疏散:如大型体育赛事、音乐会等特殊事件结束后的人员疏散。
二、疏散路线规划中的多目标优化问题多目标优化是指在规划过程中同时考虑多个目标,这些目标之间可能存在冲突,需要通过优化算法来平衡。
在疏散路线规划中,多目标优化问题尤为重要。
2.1 多目标优化问题的特点多目标优化问题具有以下特点:- 目标多样性:需要同时考虑疏散时间、疏散流量、疏散成本等多个目标。
- 目标冲突性:不同目标之间可能相互制约,如减少疏散时间可能增加疏散成本。
- 解决方案的多样性:存在多种可能的解决方案,每种方案在不同目标上的优劣不同。
2.2 多目标优化问题的难点疏散路线规划中的多目标优化问题存在以下难点:- 确定权重:如何合理分配不同目标的权重,以反映其在规划中的重要性。
- 解决冲突:如何在不同目标之间找到平衡点,避免过度偏重某一目标。
- 算法选择:选择合适的优化算法,以高效求解多目标优化问题。
2.3 多目标优化问题的解决策略解决疏散路线规划中的多目标优化问题,可以采取以下策略:- 权重法:为不同目标分配权重,将多目标问题转化为单目标问题求解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷第8期 2017年8月哈尔滨工程大学学报Journal of Harbin Engineering UniversityVol.38 No. 8Aug. 2017实时环境下多目标的路径选择模型陈海鹏1’2,刘陪1’2,申铉京1’2,王玉1,2’3(1.吉林大学计算机科学与技术学院,吉林长春130012; 2.吉林大学符号计算与知识工程教育部重点实验室,吉林长春130012; 3.吉林大学应用技术学院,吉林长春130012)摘要:针对出行者出行需求多样化的问题,本文从时间、费用角度出发,构建了实时环境下基于多目标的路径选择模型。
采用加权求和函数对多维数据聚集得到组合权重,而权重系数可依据出行者需求或喜好设定。
为验证模型的实用价值,在仿真环境下,多目标模型与基于几何距离最短的路径选择模型在时间、费用、距离等评价指标进行了对比。
实验结果证明实时环境下基于多目标的路径选择模型更具有实用价值。
关键词:智能交通系统;动态路径诱导系统;多目标;路径选择模型;加权求和函数;组合优化;广义自适应A'■算法D O I:10. 11990/jheu. 201604080网络出版地址:http://www. cnki. net/kcms/detail/23. 1390. u.20170427. 1510. 076. html中图分类号:TP399 文献标志码:A文章编号:1006-7043(2017)08-1285-08Route choice model based on multi-objective in a real-time environment CHEN Haipeng1’2,LIU Pei1’2,SHEN Xuanjing1’2,WANG Yu1’2’3(1. College of Computer Science and Technology, Jilin University, Changchun 130012, China;2. Key Laboratory of Symbolic Computation and Knowledge Engineering of Ministry of Education, Jilin University, Changchun 130012, China;3. Applied Technology College ,Jilin University, Changchun 130012, China)Abstract ;In view of this situation,a route choice model based on multi-objective was constructed and considered from the angles of cost and time in this paper.The weighted sum method was used to aggregate multi-target data objects to obtain the composite weight value,and the weight coefficient can be set based on travelersr needs or preferences.To verify the practical value of the model,the multi-objective-based model was compared with the route choice model on the basis of the shortest geometric distance in terms of time,cost,and distance.Experimental results show that the path of the multi-objective optimal route choice mode has more practical value based on a real-time environment.Keywords :intelligent transportation system;dynamic route guidance system;multi objective;route choice models; weighted sum method;combinatorial optimizing;generalized adaptive A*algorithm智倉旨交通系统(intelligent transportation system,ITS)是集信息、通信、控制及网络等技术于一体的综合研究学科,可以提供全方位、实时、准确以及高效 的服务信息,ITS是有潜力的研究方向,进一步说将 成为未来相关研究领域的热点[1]。
动态路径诱导 系统(dynamic route guidance system,DRGS)是 ITS 一个重要的分支,利用计算机、通信等现代技术,为 出行者提供实时交通信息以及最优路径。
在DRGS 中,路径选择模型可以确立DRGS的目标m。
路径诱导模型分为静态模型和动态模型,静态收稿日期=2016 -04 -26. 网络出版日期=2017 -04 -27.基金项目:国家青年科学基金项目(61305046);吉林省自然科学基金 项目(20140101193JC,20150101055JC) •作者简介:陈海鹏(1978 -),男,副教授;王玉(1983 _),男,讲师.通信作者 :王玉,E-mail :wangyu001@ jlu. edu. cn.模型以假设出行者获知路网信息为前提,并以随机 期望效用理论或积累前景理论为基础。
而动态模型 包含一些信息获取和学习的过程,以随机虚拟理论 或增强学习理论作为指导[3]。
目前,在国内路径诱 导模型的研究主要还是集中在静态模型且取得了阶 段性的成果。
基于期望效用理论的模型是在确定性 框架下,以几何路径或者出行时间为效用值,以期望 获得效用最大化评价各备选方案的优劣。
孟梦等针 对不同的出行时间,提出了组合出行工具的路径选 择模型,以组合出行工具的模式下为出行者提供最 优路径[4]。
刘艳秋等构建了交通堵塞下基于实时 交通信息的路径选择模型[5]。
相反,积累前景理论 是不确定性情况下的决策行为,决策者以财富的变 化量而不是最终量作为参考依据进行决策[6],针对 交通信息不确定的特性,诸多学者以积累前景理论•1286 •哈尔滨工程大学学报第38卷为基础提出了路径选择模型[74]。
但是,目前提出 的模型大多仅针对路段行程时间构建的单目标路径 选择模型[6],显然,与实际存在很大的偏差。
在实 时环境下,交通畅通、拥挤情形下路阻的产生形式有 所差异,因此,分别以交通畅通、拥挤下的路阻构建 了基于时间最短的路径选择模型,进而提高了模型 的可靠性。
Erel Avineri等提出时间是影响路径抉择最重 要的因素,但不能确切地表述所有出行者的意愿[1°]。
由此可见,在实时环境下,路径优化是多目 标组合优化问题[11],例如,时间、费用、环境等因素。
因此,仅从时间上考虑构建路径选择模型并不合理 而建立基于多目标的路径选择模型是有必要的。
因此,分别从时间、费用两个角度出发,构建了实时环 境下基于多目标的路径选择模型。
在处理多准则优化问题时,一般采取单目标类 和多目标类的策略[12]。
单目标类将多目标优化问 题转化为单目标优化问题,转化过程使用目标聚合 或目标标准策略对其结果进行组合。
而多目标类是 以目标向量间的关系来定义决策向量之间的优劣关 系,一般可获得均勻分布的Pareto最优前端。
但在 高维度下,多标准Pareto最优路径算法运行效率极 低甚至无法运行[13]。
然而,在实时信息下,对反应 速度的要求却十分苛刻,由此可见多目标类在动态 实时路网中并不实用。
评价函数中加权求和函数属 于单目标类,加权求和函数是解决多目标函数优化 问题比较常见的方式之一。
它采用目标聚合策略即 将多维空间中的数据对象聚集转化为单目标空间的 优化问题。
处理过程相对比较简单,但组合权重的 意义及结果的优劣至关重要。
聚合过程中,由于不 同的计量方式,各个目标函数间具有不同的值域。
相应地,当映射到加权求和目标函数时,决策变量间 具有不同的阈值。
在这种情形下,阈值大的决策变 量对组合函数的支配大,反之支配小[14]。
所以,本 文在使用加权求和函数前,对各个目标函数值进行 了预处理,即对其进行类似的量值处理,从而保证支 配能力的均衡即可获取最优路径。
1基于多目标的路径选择模型设计1.1问题描述及分析路径优化问题相当于图理论模型中最优路径的 查找问题,但又存在差异。
在动态路径诱导系统中 含有静态属性和动态属性[15],静态属性是路网信息 相对固定的部分,例如:地理位置信息、路段间距以 及路段的基本通行能力等。
而动态属性可以反映实 时信息状况,例如,车流量、行车速度等。
所以,路网 数据对象具有多样、复杂以及实时的特性。
以图论为基础,同时结合动态路网信息的特性,路径优化问 题的定义形式:P=!G,r,,Sstart,S e n d|(1)式中:G= (y y.)是静态属性,表示路网结构;F是 从起始点到结束点间的结点集合;&是当前S s t a r t到 s6nd所有无环路集合,其定义形式为\Rij\i,j&V!\ i(2)式中:是体现了动态路径诱导系统中的动态属性,对应(i,j)间的权重值,并以此为优化准则;Sstart是出发节点且随着车辆的不断行驶动态更新,Send表亦目标节点。
1.2基于时间最短的路径选择模型在实时交通信息下,影响路阻的因素多样化。
例如:天气、ITS系统故障、交通事故等偶然事件,也 包含一些不确定因素,例如车速、车流量等。
所以,仅以单一的车辆行程时间为路阻并不合理,交通畅 通或者拥挤的情形下产生路阻的方式有所差异。
在 交通畅通情形下以行驶时间及交叉口转向延误产生 的时间为路阻;而在交通拥挤的状态下,产生路阻最 主要的是延误时间而行程时间可忽略不计。
所以,基于时间最短的路径选择模型的定义形式为min Y,X^>/i K( +d D v)+(1J-X)(J, +£»,)(«其约束条件为R v=f1'^o,i=iK=n, Q/C,e[0,1]_ io,(2C, - Q,)/C,e(1,2)0,(0 < D t j(t) <tj1,(K ^D.j it)^nK)式中均属于^集合且互异。