系统建模与仿真作业
系统建模与仿真习题2及答案

系统建模与仿真习题二及答案1. 考虑如图所示的典型反馈控制系统框图(1)假设各个子传递函数模型为66.031.05.02)(232++-+=s s s s s G ,s s s G c 610)(+=,21)(+=s s H 分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法求该系统的传递函数模型。
(2) 假设系统的受控对象模型为s e s s s G 23)1(12)(-+=,控制器模型为 ss s G c 32)(+=,并假设系统是单位负反馈,分别用feedback ()函数以及G*Gc/(1+G*Gc*H)(要最小实现)方法能求出该系统的传递函数模型?如果不能,请近似该模型。
解:(1)clc;clear;G=tf([2 0 0.5],[1 -0.1 3 0.66]);Gc=tf([10 6],[1 0]);H=tf(1,[1 2]);G1=feedback(G*Gc,H)G2=G*Gc/(1+G*Gc*H)Gmin=minreal(G2)结果:Transfer function:20 s^4 + 52 s^3 + 29 s^2 + 13 s + 6s^5 + 1.9 s^4 + 22.8 s^3 + 18.66 s^2 + 6.32 s + 3Transfer function:20 s^8 + 50 s^7 + 83.8 s^6 + 179.3 s^5 + 126 s^4 + 57.54 s^3 + 26.58 s^2 + 3.96 ss^9 + 1.8 s^8 + 25.61 s^7 + 22.74 s^6 + 74.11 s^5 + 73.4 s^4 + 30.98 s^3+ 13.17 s^2 + 1.98 s Transfer function:20 s^4 + 52 s^3 + 29 s^2 + 13 s + 6s^5 + 1.9 s^4 + 22.8 s^3 + 18.66 s^2 + 6.32 s + 3(2)由于s c e s s s s G s G 232)1(3624)(*)(-++= 方法1:将s e 2-转换为近似多项式。
系统建模与仿真课后作业
目录 实验 1 CH 关联 ................................................................................................................................. 3 实验内容................................................................................................................................... 3 实验要求................................................................................................................................... 3 实验思路................................................................................................................................... 3 实验讨论................................................................................................................................... 3 实验结果................................................................................................................................... 4 实验 2 苯氯化学反应仿真器 .......................................................................................................... 6 实验内容................................................................................................................................... 6 实验原理................................................................................................................................... 6 实验思路................................................................................................................................... 7 问题 1................................................................................................................................ 7 问题 2................................................................................................................................ 7 实验讨论................................................................................................................................... 8 实验 3 心肌细胞电生理特性仿真 .................................................................................................. 9 实验内容................................................................................................................................... 9 实验原理................................................................................................................................... 9 实验思路................................................................................................................................. 11 实验结果................................................................................................................................. 11 实验问答题............................................................................................................................. 13 实验讨论................................................................................................................................. 14 附录(改进部分代码)................................................................................................................. 15 实验 1...................................................................................................................................... 15 实验 2...................................................................................................................................... 15 实验 3...................................................................................................................................... 16
系统建模与仿真仿真作业结果

Simulink 仿真根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图图3根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。
所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。
我+ 1们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为当然,这是需要时间和经验的。
校正后的动态结构图如图5所示校正后的输出转速曲线如图6所示|Time cffeel 0图六电流环跟随性能仿真实验如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。
这就需要我们对电流环的跟随性能加以分析。
将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。
电流环模型如图7所示:Transfer Fcn1图7通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。
[nu m,de n]=li nm od('curre nt_loop')sys=tf( nu m,de n)figure(1)margi n(sys)[mag,phase,w]=bode(sys);[gm,pm,wcg,wcp]=margi n( mag,phase,w)Figure(2)Nyquist(sys)Figure©)Step(sys)我们还可以得到以下的数据gm = 4.2925 pm =47.7281 wcg = 345.3056cp = 164.6317剪切频率3 c=164.6317rad/s;相角相对裕度S = 47.7281 °; -n穿越频率3g=345.3056rad/s 幅值相对裕度Lh=20lg (4.2925) =12.65dB27t 01 上2 」 J A 10 10 10 10 10 F 怛OuerKV HQd^k 图8电流环的bode 图图10电流环的单位阶跃响应⑥s co«3 ■….呂畫rl u 丄图9电流环的nyquist 图0D O H Di 心4甬mGm - 12 7d0 欄 ratfs) Rm _ 47 5 de 。
生产系统建模和仿真上机报告2
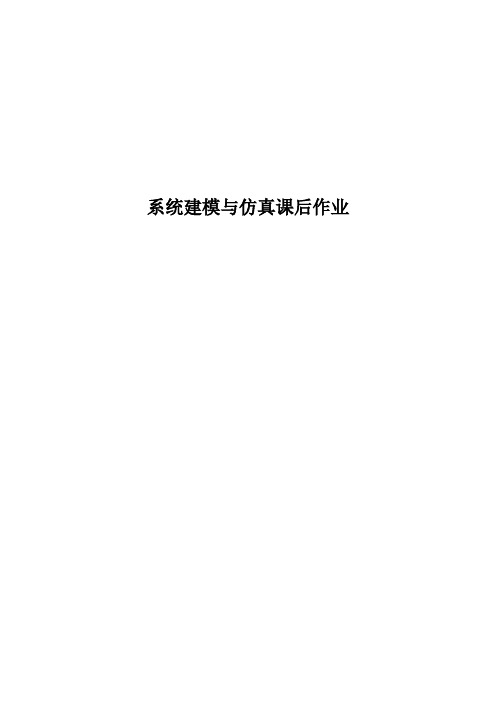
一、1.实验素材:某港口只有一个岸桥为到达的船舶提供卸货服务。
当船舶到达港口时,停入泊位等待服务。
如果岸桥空闲,则立即对其进行货物卸载作业;如果岸桥为其他船舶卸载,则船舶在泊位等待;岸桥为船舶提供服务的规则为FIFO。
假设船舶到达时间间隔服从均值为10小时的负指数分布,岸桥为每艘船的卸载时间服从[6,14]小时的均匀分布。
建立仿真模型,运行100天=2400小时,统计:1.岸桥的利用率;2.船舶的平均等待时间;港口船舶等待队列的最大长度;4.仿真结束时服务船舶的数量。
进一步考虑以下几种情况1.船舶到达时发现港口中已经有4艘船舶在等待,则选择离开;统计系统100天流失的船舶数量;(通过控制Buffer元素的Capacity实现)2.船舶等待时间超出30小时,则选择进行服务投诉(;统计系统100天中接受到的投诉数量;(通过控制Buffer元素的Delay项实现)3.港口增加了一台岸桥对船舶进行服务;仿真比较此时系统与原系统(只有一个岸桥)在绩效指标上的变化(通过设置Machine元素的Quantity项目实现)统计1.岸桥的利用率;2.船舶的平均等待时间;3.港口船舶等待队列的最大长度;4.仿真结束时服务船舶的数量2.系统分析:把一个part设定成船,一个buffer设定成泊位,一个machine设定成岸桥;3.详细建模:设施布置图:输出报告:ELEMENT NAME: 岸桥Element Type: MachineQuantity: 1Priority: LowestType: SingleCycle Time: UNIFORM (4,16,1)Input / Output RulesInput: PULL from 泊位Output: PUSH to SHIP_____________________________________________________________ELEMENT NAME: 泊位Element Type: BufferQuantity: 1Capacity: 1000Input Option: RearOutput Option: FirstSearch From: Front_____________________________________________________________ELEMENT NAME: 船Element Type: PartType: Variable attributesGroup number: 1Inter Arrival Time: NEGEXP (10,1)First Arrival at: 0.0Maximum Arrivals: UnlimitedInput / Output RulesOutput: PUSH to 泊位_____________________________________________________________ 4.运行模型:5.结果分析:仿真次数 1 2 3 4 5 均值置信下限置信上限岸桥利用率96.71% 96.45% 100% 92.41% 99.95% 97.10% 0.9322 1.009 船舶的平均等待时间104.31 108.12 123.72 43.35 134.91 102.882 58.835 146.9 港口船舶等待队列的最大长度24 35 23 12 20 22.8 12.508 33.09 已服务船舶数234 222 233 212 235 227.2 214.80 239.51)设定buffer(泊位)的Capacity为4可以完成。
《系统建模与仿真》作业题1
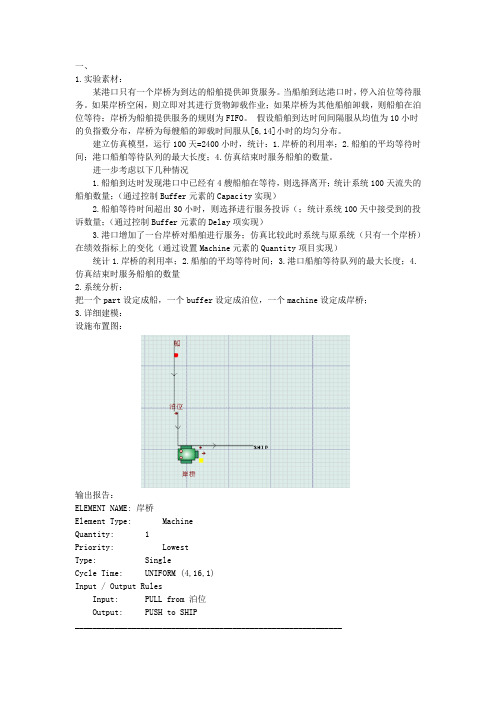
《系统建模与仿真》作业第一次(共两次)布置作业时间:“经典建模法”结束后 要求交作业时间:从布置日开始不超过1周 作业量:共3道题第1题——体现电气系统经典建模[题目] 在如图所示的电路中,R 表示一个电阻,L 表示一个电感,C 表示一个电容,i 表示电流强度,u 表示输入电压,c u 表示电容器的输出电压。
试写出一个状态空间数学模型。
u图1 典型的RLC 电路第2题——体现机械系统经典建模[题目]如图2是一个文字处理器打印轮轴控制系统的简化图。
打印轮轴由一个直流电动机通过皮带和滑轮进行控制。
假设皮带是刚性的,电动机与皮带轮之间的连接也是刚性的,并定义如下的参数和变量:m ()T t 是电动机的力矩;m ()t 是电动机的角位移;()y t 是打印轮轴的线性位移;m J 式电动机的惯量;m B 是电动机的粘性摩擦系数;K 是扭转轴的刚性系数;r 是滑轮的半径;M 是打印轮轴的质量。
(1)写出系统的微分方程;(2)写出系统的传递函数模型m ()()Y s T s 。
T打印轮轴图2 打印轮轴控制系统简化图第3题——体现热工过程经典建模汽轮机高压加热器疏水系统的原理框图如图3所示,其中各段抽汽的压力大小关系为321p p p >>,抽汽温度大小关系为321T T T >>。
给水流量w 和给水温度T 一般来说为两个随机变量。
三个疏水管道阀门的开度为归一化量,即]1,0[,,321∈u u u 。
三个高压加热器的疏水水位分别为1y ,2y ,3y 。
它们的关系可描述为),,,(111111T w T p f u k y+-= ),,,(22223122T w T p f u k u k y+-= ),,,(T w T p f u k u k y+-=图3 汽机高加疏水系统原理框图式中的),,,(111T w T p f ,),,,(222T w T p f ,),,,(333T w T p f 表示系统的不确定干扰,1k ,2k ,3k ,4k ,5k 表示适当的正常数。
系统建模与仿真期末大作业
6.
6.1
6.1.1
(1)收费的大致流程:
(2)我们采用定点观察法,对昆华医院的药房进行数据采集。得到数据,然后通过minitab对数据进行图形分析,如下:
取药服务时间拟合直方图:
由图可知,取药的服务时间基本符合正太分布;
有图可知,病人在整个取药过程中,排队等待的时间占总服务时间中相当大的比重,可见,取药过程中存在不合理的流程安排,需要进一步的优化。
6.1.2 取药仿真模型
通过实地观察昆华医院大药房的人流过程,我们通过定点观察对其进行了数据采集,并建立了其仿真模型,展示如下:
表1 药房设施与模型实体对照表
仿真实体
绿门
箭头
大厅
桌子
女工
红门
药房设施
病人到达
排队等待
缴费
取药
护士
离开
参数设置
erlang( 0 , 5 , 2 )
可容纳6人
可容纳1人,用时10S
方差分析
来源 自由度 SS MS F P
回归 3 374922 124974 2.20 0.112
误差 26 1474365 56706
合计 29 1849287
方差的序贯分析
来源 自由度 SS F P
线性 1 31751 0.49 0.490
二次 1 251248 4.33 0.047
立方 1 91923 1.62 0.214
运用医院排队系统优化是集挂号、检测、检验、诊断及取药为一体,在高效完成病人服务的同时,减少病人排队等待时间,显著改善医院的服务效率和服务质量。
2.4研究目的:希望通过本课题的研究,利用实地调查的方式采集相关数据,并对这些数据进行一系列的分析,应用虚拟仿真软件FlexsimHealthcare进行仿真,利用互联网分布调度信息,发现在医院就诊过程中的导致病人多次排队的原因和瓶颈,提出一定的改进方案,从而减少病人排队等待的时间, 显著改善医院的服务效率和服务质量。
系统建模与仿真习题1及答案
系统建模与仿真习题一及答案1. 有源网络如图所示(1) 列些输出0u 与输入1u 之间的微分方程。
(2) Ω=101R 、Ω=52R 、Ω=23R 、Ω=34R 、F C 2=,在零初始条件下,将(1)中的微分方程表示为传递函数、状态空间形式、零极点增益形式。
(3)求(2)中方程在输入1u 为单位阶跃响应下的输出曲线。
解:(1) 由运算放大器的基本特点以及电压定理)4()3()(1)2()()1(2132021421320111R i R i u dt i i Cu R i i u R i u R i u c c -=+=+++==⎰(3)式代入(2)式得:42121320)()(1R i i dt i i C R i u ++++=⎰ (5)消去中间变量21,i i 有13142430114131230111120)(1u R R R R R R u u R R dt u R R R R u R u C u R R u ++++++=⎰ 两边求导整理后得(2)代入数据可以得到微分方程为:11007.02.610u u u u--=+ 程序如下:clc;clear;num=[-6.2 -0.7]; den=[10 1]; Gtf=tf(num,den) Gss=ss(Gtf) Gzpk=zpk(Gtf)结果:Transfer function: -6.2 s - 0.7 ------------ 10 s + 1状态空间形式: a =x1 x1 -0.1 b =u1 x1 0.125 c =x1 y1 -0.064 d =u1 y1 -0.62Continuous-time model.Zero/pole/gain: -0.62 (s+0.1129) ---------------- (s+0.1)(3)由(2)知系统的传递函数为-6.2 s - 0.7 ------------ 10 s + 1系统的输入信号为单位阶跃函数,则其Laplace 变换为1/s ,这样系统的输出信号的Laplace 变换为Y(s)=-6.2 s - 0.7 ------------ 10 s^2 + s编写程序,将其表示为(R,P,Q )形式 clc;clear; s=tf('s')Gtf=(-6.2*s-0.7)/(10*s^2+s) [num,den]=tfdata(Gtf,'v') [R,P,Q]=residue(num,den) R =0.0800 -0.7000 P =-0.1000 0 Q = []于是得到:7.008.0)(1.0-=-t e t y 绘制曲线程序: clc;clear; t=0:0.1:100;y=0.08*exp(-0.1*t)-0.7; plot(t,y)2.已知系统的框图如下:其中:G1=1/(s+1),G2=s/(s^2+2),G3=1/s^2,G4=(4*s+2)/(s+1)^2,G5=(s^2+2)/(s^3+14)。
系统建模与仿真习题3及答案
系统建模与仿真习题三及答案1.已知系统)24(32)(21+++=s s s s s G 、2103)(2+-=s s s G 求G 1(s)和G 2(s)分别进行串联、并联和反馈连接后的系统模型。
解:clc;clear;num1=[2 3];den1=[1 4 2 0];num2=[1 -3];den2=[10 2];G1=tf(num1,den1);G2=tf(num2,den2);Gs1=series(G1,G2)Gp1=parallel(G1,G2)Gf=feedback(G1,G2)结果:Transfer function:2 s^2 -3 s - 9------------------------------10 s^4 + 42 s^3 + 28 s^2 + 4 sTransfer function:s^4 + s^3 + 10 s^2 + 28 s + 6------------------------------10 s^4 + 42 s^3 + 28 s^2 + 4 sTransfer function:20 s^2 + 34 s + 6--------------------------------10 s^4 + 42 s^3 + 30 s^2 + s – 92.某双闭环直流电动机控制系统如图所示:利用feedback( )函数求系统的总模型。
解:模型等价为:编写程序:clc;clear;s=tf('s');G1=1/(0.01*s+1);G2=(0.17*s+1)/(0.085*s);G3=G1;G4=(0.15*s+1)/(0.051*s);G5=70/(0.0067*s+1);G6=0.21/(0.15*s+1);G7=(s+2)/s;G8=0.1*G1;G9=0.0044/(0.01*s+1);sys1=feedback(G6*G7,0.212);sys2=feedback(sys1*G4*G5,G8*inv(G7)); sys=G1*feedback(sys2*G2*G3,G9)结果:Transfer function:3.749e-005 s^6 + 0.008117 s^5 + 0.5024 s^4 + 6.911 s^3 + 36.57 s^2 + 78.79 s + 58.8 -------------------------------------------------------------------------------------------------------4.357e-014 s^10 + 2.432e-011 s^9 +5.43e-009 s^8 +6.303e-007 s^7 + 4.145e-005 s^6 + 0.001578 s^5 + 0.03217 s^4 + 0.2098 s^3 + 0.4116 s^2 + 0.3467 s + 0.2587根据需要可忽略高阶项。
西工大2022年4月机考《系统建模与仿真》作业参考答案
西工大2022年4月机考《系统建模与仿真》作业参考答案试卷总分:100 得分:100本科目3次作答机会,每次试题内容相同,只是题目和选项顺序是随机调整的,大家可放心下载使用一、单选题(共20 道试题,共40 分)1.数学模型根据模型的状态变量可以分为()。
A.连续变化模型和离散变化模型B.连续时间模型和离散时间模型C.确定性模型和随机性模型D.同构模型和同态模型正确答案:A2.在仿真模型一样,所要仿真的时间长度也一样的情况下,采用()可获得最高的效率。
A.固定步长时间推进机制B.下次事件时间推进机制C.混合时间推进机制D.随机步长时间推进机制正确答案:B3.忽略具体事物的特殊性,着眼于整体和一般规律,这种研究方法是()。
A.抽象B.归纳C.演绎D.推导正确答案:A4.()是把过程调用和响应调用执行码结合在一起的过程A.汇编B.联编C.调试D.执行正确答案:B5.在系统与模型之间,如果在行为一级等价,则称之为()。
A.同构模型B.同态模型C.数学模型D.本构模型正确答案:B6.一种产品进入市场之后,一般会经过销售速度先不断增加然后又逐渐下降的过程,这称为产品的()。
A.生命周期B.保质期C.生产周期D.销售周期正确答案:A7.由于大多数微分方程是求不出其解析解的,因此研究其()和数值解法是十分重要的手段。
A.离散性B.连续性C.非稳定性D.稳定性正确答案:D8.根据事件调度法建立的仿真模型称为()仿真模型。
A.面向事件的B.面向对象的C.面向用户的D.面向系统的正确答案:A9.能够预定事件发生时间的策略方法是()。
A.事件调度法B.活动扫描法C.进程交互法D.结果预测法正确答案:A10.系统在有确定输入时,得到的输出却不确定,这种事物发展变化没有确定因果关系的模型是()。
A.连续变化模型B.离散变化模型C.随机性模型D.因果模型正确答案:C11.系统数学模型的建立需要按照模型论对输入、输出状态变量及其间的函数关系进行抽象,这种抽象理论称为()。
系统建模与仿真习题5及答案
系统建模与仿真习题五及答案1.已知系统的开环传递函数为)62)(5)(33(12)(222++++++=s s s s s s s s G ,根据相角裕度,幅值裕度判断单位负反馈下闭环系统的稳定性,并用时域响应验证结论。
解:clc;clear;num=[2 1];den=conv([1 0 0],conv([1 3 3],conv([1 5],[1 2 6])));G1=tf(num,den); margin(G1)由图知20lgh=24.8dB ,h>1;r=2.67deg 。
因此对应的闭环系统稳定。
下面由负反馈的阶跃响应验证闭环系统的稳定性clc;clear;num=[2 1];den=conv([1 0 0],conv([1 3 3],conv([1 5],[1 2 6])));G1=tf(num,den);step(feedback(G1,1))2. 已知某系统的开环传递函数为)32)(5()5(2)(2++++=s s s s s G (1)绘制系统的奈奎斯特曲线,判断闭环系统的稳定性。
(2)求出系统的单位阶跃响应,证明(1)中稳定性的判断。
解:clc;clear;num=[2 10];den=conv([1 2],[1 2 3]);G=tf(num,den);subplot(2,1,1)Nyquist(G)subplot(2,1,2)step(feedback(G,1))结论:开环传递函数位于s右半平面的极点数p=0。
由Nyquist图知:Nyquist曲线逆时针包围临界点(-1,j0)的圈数R=0。
因此,闭环正实部特征根个数Z=0,说明系统是稳定的。
仿真曲线也表明闭环系统是稳定的。
3. 已知一个离散系统的输入、输出数据如下:u=[0.9103;0.7622;0.2625;0.0475;0.7361;0.3282;0.6326;0.7564;0.9910;0.3653;0.2470 ;0.9826;0.7227;0.7534;0.6515;0.0727;0.6316;0.8847;0.2727;0.4364;0.7665;0.4777;0. 2378;0.2749]y=[0;18.4984;31.4285;32.3228;28.5690;39.1704;39.8825;46.4963;54.5252;65.9972;6 2.9181;57.5592;67.6080;70.7397;73.7718;74.0165;62.1589;63.0000;68.6356;60.8267 ;57.1745;60.5321;57.3803;49.6011]请用最小二乘法辨识出系统的脉冲传递函数模型,要求该模型的分子、分母的阶次分别为2、3次。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
病菌传染人数动态变化模型的仿真专业:机械电子工程姓名:王勇(10S030039)日期:2010年11月8日摘要本文利用已知的模型,运用MATLAB中Simulink工具箱对模型进行的准确的描述,然后进行仿真分析。
Simulink的每个子模型库包含有相应的功能模块,用户也可以定制和创建用户自已的模块,模型化图形输入是Simulink提供了一些按功能分类的基本的系统模块,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型,进而进行仿真与分析。
通过分析对传染情况有了准确的了解,利于对传染情况的控制。
关键字:建模,MATLAB/Simulink,分析AbstractThis paper using the known model, using MATLAB Simulink toolbox of model of accurate description, then the simulation analysis.Each submode Simulink this repository contains a corresponding function module, users can also customize and create user own module, modeling graph input is Simulink provides some according to the basic function classification system module, through to these basic modules calls, and then connect them up can form required system model, and then, a simulation and analysis.Through the analysis of infectious diseases have accurate understanding, benefit of infection status of control.Keywords:Modeling,MATLAB/Simulink,Analysis引言传染病是致病性(微)生物在人与人、动物与人及动物与动物之间相互传播的疾病,其流行既有隐蔽性又有突发性.不论急性还是慢性传染病都给人类健康带来极大灾难、给社会经济发展造成很大的损失。
导致传染病发生的因素有多种,如不科学的生活、生产方式,自然环境的破坏,耐药微生物的不断增多等等.降低传染病危害的关键在于预防及整个社会协调一致的努力.每个社会公民都应该掌握预防传染病方面的基本知识并不断提高预防意识,各级政府应该采取更加科学的管理和预防措施,并加强对传染病和突发性疾病的研究投入和推广现有疫苗的使用等。
对传染病人群传染情况的动态模型的分析了解有利于传染病的防治与治疗。
1 系统模型的描述已知某地区在有病菌传染下的描述三种类型人数变化的动态模型如下:112'X X X α=- 1(0)620X =2122'X X X X αβ=- 2(0)10X = 32'X X β= 3(0)70X =其中1X 表示可能传染的人数;2X 表示已经得病的人数;3X 表示已经治愈的人数;α=0.001;β=0.072。
2 simulink 进行的仿真分析2.1 用simulink 建立系统模型首先,我们采用MATLAB 中的Simulink 工具箱对其进行仿真。
Matlab 是矩阵实验室(Matrix Laboratory)之意。
除具备卓越的数值计算能力外,它还提供了专业水平的符号计算、文字处理、可视化建模仿真和实时控制等功能。
Matlab 的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用Matlab 来解算问题要比用C, FORTRAN 等语言完成相同的事情简捷得多。
Simulink 是Matlab 软件的扩展,它是实现动态系统建模和仿真的一个软件包。
它与Matlab 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
Simulink 的每个子模型库包含有相应的功能模块,用户也可以定制和创建用户自已的模块,模型化图形输入是Simulink 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
除此之外,用户还可以在改变参数后迅速观看系统中发生的变化。
仿真的结果还可以存放到Matlab 的工作空间做事后处理。
仿真步骤如下。
1)在命令窗口中输入Simulink 后回车,或单击MATLAB 工具栏中的Simulink 图标则可打开Simulink 模型库窗口。
在File 菜单下选择new/model ,打开一个新的空白窗口,命名为“bingjun.mdl”。
2)建立此系统模型所需要的系统模块主要有:Continuous模块库中的Integrator模块:积分器模块。
Math运算库中的Product模块:乘法器,产生模块各输入的简积或商。
Math运算库中的Gain模块:信号增益模块。
Math运算库中的Add模块:信号相加。
3)按图2-1编辑三种类型人数变化的动态模型。
图2-1 simulink下编辑的三类人数变化的模型2.2 系统模块的参数设置Integrator模块的参数设置:双击该模块,可以在弹出的对话框中对积分的初始值进行修改,默认值为零。
在此模型中1(0)620X=;2(0)10X=;3(0)70X=。
参数设置对话框如图2-2所示。
图2-2 Integrator模块参数设置对话框Gain模块的参数设置:双击该模块,出现相应的模块参数设置对话框设置系统参数。
该模型中Gain为-0.001;Gain1为0.001;Gain2为-0.072。
参数设置对话框如图2-3所示。
图2-3 Gain模块参数设置对话框Product模块及Add模块的参数设置直接为缺省状态。
参数设置对话框如图2-4,2-5所示。
图2-4 Product模块参数设置对话框图2-5 Add模块参数设置对话框2.3 系统仿真分析Scope为信号显示器,显示仿真期间产生的信号,输出分析曲线。
Scope模块是一个用途非常广泛的显示模块,它以图形的方式直接显示指定的信号,对系统的仿真分析有重要作用。
Scope模块可以使用户对输出曲线进行各种控制调整,以便进行观测和分析输出结果,而非仅仅使用Scope的默认设置进行信号显示。
该模型中X,2X,3X的信号输出曲线如图2-6,2-7,2-8所示。
1图2-6X输出曲线1图2-7X输出曲线2图2-8X输出曲线33 用MATLAB语句进行仿真3.1MATLAB计算方法简介该模型的动态变化情况也可以通过直接编写MATLAB程序得以解决。
借助于常微分方程系统ODE,该系统处理的是初始值已知的一阶微分方程。
对于某一时间间隔 0≤t≤T,初始值问题的解决方法是将时间分成一组有限和离散的时间点,例如用相同的时间间隔t∆进行等分:t=i t∆,i=0,…..Ni其中时间步长t∆=T / N,N为某一整数。
这种导数能被微分方程的可微分的商所代替,微分方程表示在不同时间点的解。
这种方法的稳定性取决于t∆的大小和所采用的数值方法,用这种方法能得到 ODE的近似值。
在许多应用中有一些微分过程非常复杂的微分方程,在某些区域里这些方程要求有非常小的时间步长t∆。
解决这些问题的困难在于问题中涉及不同的时间尺度,如解的导数可能有较大的变化。
MATLAB使用龙格-库塔-芬尔格(Runge-Kutta-Fehlberg)方法来解决ODE 问题。
在有限点内计算求解,而这些点的间距由解本身来决定。
当解比较平滑时,区间内使用的点数少一些;在解变化很快时,区间内应使用较多的点。
函数ode45使用(4,5)阶的龙格-库塔-芬尔格方法。
该模型的仿真分析中选用函数ode45.3.2仿真及结果显示首先创建函数rosslor ,并将其保存在M 文件rosslor.m 中:function dx=rossler(t,x);dx=[-0.001*x(1)*x(2);0.001*x(1)*x(2)-0.072*x(2);0.072*x(2)];然后调用一个ODE 算法和画出解的图形:x0=[620;10;70];[t,y]=ode45('rossler',[0,20],x0);plot(t,y);所得结果如图3-1所示。
图3-1 1X ,2X ,3X 的信号输出曲线4 结果分析前述过程通过不同的仿真方法得到了未来20年内三种人数的动态变化情况。
我们可以使用Simulink工具箱中的Display模块得到各时间处的人数分布情况。
20年后该地区的患病情况如图3-2所示。
图3-2 20年后各种情况人数综述,从各曲线中可以看出X所表示的可能传染的人数呈逐年递减的趋势,120年后可能传染的人数大约为4人;X所表示的已经治愈的人数呈先上升后下2降的趋势,大概在12年达到最大值,20年后的人数约为260人;X所表示的3已经治愈的人数呈逐年增多的趋势,20年后约为436人。
5 结论利用已知模型及初始条件,运用MATLAB通过仿真方法的分析可以精确了解未来20年内三种人数的动态变化情况,十分有利于对该传染病情况的控制。
Simulink与MATLAB的无缝结合使建立仿真模型,监控仿真过程,分析仿真结果变得非常方便。
参考文献[1] 张晓华.系统建模与仿真.北京:清华大学出版社,2006.12[2] 孙祥等.MATLAB7.0基础教程.北京:清华大学出版社,2005.5[3] 王孝武.现代控制理论基础(第二版).北京:机械工业出版社,2006.8[4] 薛定宇.高等应用数学问题的MATLAB求解.北京:清华大学出版社,2004.8[5] 姚俊,马松辉.Simulink建模与仿真.西安:西安电子科技大学出版社,2002.8[6] 黄永安,李文成,高小科.Matlab7.0/Simulink6.0应用实例仿真与高效算法开发.北京:清华大学出版社,2008.6[7] 邹伯敏.自动控制理论(第二版).北京:机械工业出版社,2002.1[8] 黄道平.MATLAB与控制系统的数字仿真及CAD.北京:化学工业出版社,2004.8[9] Duane Hanselman,Bruce Littlefield.精通MATLAB 7.北京:清华大学出版社,2006.5。