实现S120主从控制的方案全解
西门子S120变频器在转炉中的应用
西门子S120变频器在转炉中的应用桂立波① 徐慧明(广东省阳春新钢铁有限责公司炼钢厂 广东阳春529600)摘 要 采用西门子新一代变频器S120为核心来升级转炉倾动主从控制系统,通过组建新的控制方式来提高转炉控制的精度和平稳性。
系统中采用一台西门子CU320-2控制单元控制4台西门子功率单元,控制单元与功率单元通过CLIQ连接,功率单元与plc通过profibus dp连接。
实现通过一台西门子CU320-2控制单元控制4台西门子功率单元的主从控制方式实现多轴控制,极大的提高了机械传动的同步性,消除了同步差异性引起的变频报故带来的生产风险因子。
通过我们公司的实践表明采用一台控制单元实现多轴同步控制与老一代一对一通控制方式比对,无论是从控制方式、结构设计都优于前者。
关键词 变频器 转炉 倾动系统 主从控制中图法分类号 TF3 文献标识码 BDoi:10 3969/j issn 1001-1269 2023 06 027ApplicationofSiemensS120FrequencyConverterinConverteGuiLibo XuHuiming(SteelmakingPlant,GuangdongYangchunNewSteelCo.,Ltd.,Yangchun529600)ABSTRACT ThenewgenerationofSiemensinverterS120isadoptedtoupgradetheconvertertiltingmaster slavecontrolsystem,andtheprecisionandstabilityofconvertercontrolareimprovedbyestablishinganewcontrolmode.Inthesystem,aSiemensCU320 2controlunitisusedtocontrol4Siemenspowerunits.ThecontrolunitandpowerunitareconnectedthroughCLIQ,andthepowerunitandplcareconnectedthroughprofibus dp.Themulti axiscontrolisrealizedthroughthemaster slavecontrolmodeofcontrollingfourSiemenspowerunitsbyoneSiemensCU320 2controlunit,whichgreatlyimprovesthesynchronizationofmechanicaltransmissionandeliminatestheproductionriskfactorscausedbyfrequencyconversionalarmcausedbysynchronizationdifference.Thepracticeofourcompanyshowsthatthemulti axissynchronouscontrolusingonecontrolunitissuperiortotheoldgenerationone to onecontrolmode,bothintermsofcontrolmodeandstructuredesign,anditisworthpopularizingandadopting.KEYWORDS Frequencyconverter Converter Tiltingsystem Master slavecontrol1 前言西门子官方公布西门子6SE70系列变频器于2011年10月宣布全部停产,新一代的西门子S120变频器作为迭代产品已成为电气传动领域的主力军。
Sinamics S120 快速入门

DC 24 V 供电
2个以太网口
2 个 Profibus 接口
【精品文档】S120矢量控制方式

一.系统连接1.打开Starter软件后,先设置端口。
选择options点击set PG/PC如图1-1。
图1-1在驱动中选serial cable(PPI)如图1-2所示。
图1-2点击Properties进入如图1-3所示界面,在PPI中设置波特率,这里选择19.2kbps。
图1-3在Local Connection中选择COM3,这是在电脑计算机管理器中显示的端口数。
如图1-4所示。
图1-42.先新建一个工程,点击,自动读取,点击Accept,自动上载。
这里会自动生成drive_unit_01,可以把原来建的项目中的变频器删除掉。
3.选中drive_unit_01,点击在线。
右下方将显示online。
4.选中drive_unit_01,点击恢复出厂设置。
5.双击,如图1-5所示,系统自动弹出自动组态界面,点击Configure进入组态页面。
图1-56.在对话框中选择V ector(矢量)控制。
(servo是伺服控制)点击Creat,如图1-6。
自动组态,通常花费1分钟左右。
可以选择go offline和stey online。
图1-67.下面组态变频器及电机参数,在离线状态下点击VECTOR-02下的configuration,读取电机与编码器的数据。
图1-7所示。
图1-78.若需要配置点击Configure DDS,手动设置电机与编码器数据(本例中编码器没有用)。
二、手动设置参数1.第一步选择需要的功能模块,由于没有伺服控制,选择画面如图2-1所示。
Technology controller: 工艺控制器,即PID控制器,常用于压力、张力、温度等物理量的控制。
Basic positioner: 基本定位,包括回零点、位置点动、软硬限位、64个位置块、MDI等功能。
Extended messages/monitoring: 扩展信息监控,包括电机转速、负载扭矩以及电机温度等物理量监控。
注:系统在默认的情况下四种扩展功能都不激活,在不使用的情况下激活会占系统资源。
基于 LabVIEW 的运动控制卡对 SINAMICS S120控制实现

基于 LabVIEW 的运动控制卡对 SINAMICS S120控制实现张浩;王永泉;陈花玲;徐亚明【摘要】The design and implementation of a kind of general motion control system towards machine tool is introduced.The system is based on the rich function library and a good performance of interface with hardware of LabVIEW virtual instrument . Using Googol′s GTS-400-PV-PCI-G type motion control card as the core, through the expansion terminals TM41 of Siemens which can provide simulated incremental encoder interface and analog input interface , enabling the motion control for new gen-eration of products for Siemens SINAMICS S120 single-axis AC drives, then the real-time control of 1FT6086 servo motor is realized.%介绍一种面向机床伺服进给运动控制系统的设计与实现。
该系统基于LabVIEW虚拟平台丰富的函数库功能及其与硬件良好的接口性能,以GTS-400-PV-PCI-G型运动控制卡为核心,通过西门子扩展端子TM41提供的可模拟增量式编码器接口及模拟量输入接口,对西门子新一代产品SINAMICS S120单轴交流驱动器进行运动控制,从而实现对1FT6086伺服电机的实时控制。
S120扩展抱闸控制
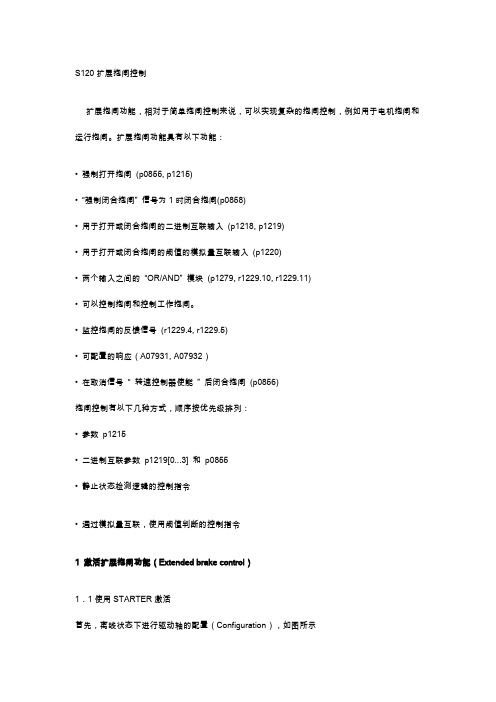
S120扩展抱闸控制扩展抱闸功能,相对于简单抱闸控制来说,可以实现复杂的抱闸控制,例如用于电机抱闸和运行抱闸。
扩展抱闸功能具有以下功能:•强制打开抱闸(p0855, p1215)•“强制闭合抱闸”信号为1时闭合抱闸(p0858)•用于打开或闭合抱闸的二进制互联输入(p1218, p1219)•用于打开或闭合抱闸的阈值的模拟量互联输入(p1220)•两个输入之间的“OR/AND”模块(p1279, r1229.10, r1229.11)•可以控制抱闸和控制工作抱闸。
•监控抱闸的反馈信号(r1229.4, r1229.5)•可配置的响应(A07931, A07932)•在取消信号“转速控制器使能”后闭合抱闸(p0856)抱闸控制有以下几种方式,顺序按优先级排列:•参数p1215•二进制互联参数p1219[0...3] 和p0855•静止状态检测逻辑的控制指令•通过模拟量互联,使用阈值判断的控制指令1 激活扩展抱闸功能(Extended brake control)1.1使用STARTER激活首先,离线状态下进行驱动轴的配置(Configuration),如图所示第二步,在右侧界面选择配置驱动数据组(Configure DDS),如图所示:第三步,进入驱动配置界面,在抱闸配置界面中激活扩展抱闸控制(Extended brake control);第四步,然后保存,在线后下装(Download CPU / drive unit to target device);第五步,确认已激活扩展抱闸功能,查看驱动轴参数r108.14,如图所示:1.2使用BOP20激活扩展抱闸功能第一步,修改CU参数p0009=2,第二步,修改CU参数p0108[1].14=1(假定p0108[1]对应所需的驱动轴),第三步,修改CU参数p0009=0,装置激活扩展抱闸功能,第四步,检查驱动轴参数r0108.14=1 。
1.3 注意事项•没有修改出厂设置时,扩展抱闸控制作为“简单抱闸控制”工作。
S120学习

一、Sinamics S120驱动器概述V/F:电压/频率DCC:驱动控制图表CFC(PLC编程语言):DC(母线电缆):Sinamics S120是西门子公司推出的集V/F、矢量控制、伺服控制于一体的驱动控制系统,不仅能控制普通的三相异步电动机,还能控制同步电机、扭矩电机与直流电机。
强大的定位功能,能够实现进给轴的绝对、相对定位。
内部集成的DCC(驱动控制图表)功能,用PLC的CFC编程语言来实现逻辑、运算及简单的工艺控制等功能。
Sinamics S120产品包括:用于供直流母线的DC/AC逆变器和用于单轴的AC/AC变频器。
供直流母线的DC/AC逆变器通常又称为Sinamics S120多轴驱动器,其结构形式为电源模块与电机模块分开,一个电源模块将三相交流电整流成540V或600V的直流电,电机模块(一个或多个)都连接到该直流母线上,优点是各电机轴之间的能量共享,接线方便、简单,特别适用于多轴控制。
单轴控制的AC/AC变频器,通常又称为Sinamics S120单轴交流驱动器,其结构形式为电源模块和电机模块集在一起,特别适用于单轴的速度和定位控制。
二、电源模块电源模块就是我们常说的整流或整流/回馈单元,它将三相交流电整流成直流电,供共给各电机模块(又称逆变器),有回馈功能的模块还能将直流电回馈给电网。
根据是否有回馈功能,将电源分为三种:BLM:基本型电源模块(Basic Line Module),整流单元,但无回馈功能,靠接制动单元和制动电阻才能实现快速制动。
SLM:智能型电源模块(Smart Line Module),又称非调节型电源模块,整流/回馈单元,但直流母线电压不可调。
ALM:主动型电源模块(Active Line Module),又称调剂型电源模块,整流/回馈单元,直流母线电压可调。
1、BLM(基本型电源模块):分为书本型(20KW、40KW、100KW)和装机装柜型(200KW、250KW)。
SINAMICS S120调试手册
Sinamics S120 调试指南 2006,11 版
-1-
西门子(中国)有限公司
自动化与驱动集团
运动控制部
Sinamics S120 系列丛书
Sinamics S120 调试指南
4.2.1 DP 地址设定 ....................................................................................................................26 4.2.2 DP 报文设置 ....................................................................................................................27 五、通过 Slave to Slave 方式实现各从站之间通讯...............................................................38 5.1 在 Step 7 中项目组态.......................................................................................................39 5.2 从站参数配置...................................................................................................................39 5.3 激活 Slave to Slave 功能..................................................................................................41 5.4 在 Step 7 中使用 SFC14,15 读写 7# 站数据...................................................................41
如何连接S7-1500与S120 实现位置控制
如何连接S7-1500与S120 实现位置控制目录1摘要 (3)2简介 (4)2.1S7-1500运动控制功能 (4)2.2SINAMICS S120 (4)3应用项目配置示例 (5)3.1S7-1500组态 (5)3.1.1组态硬件配置 (5)3.1.2设置等时同步 (6)3.1.3组态工艺对象 (8)3.1.4设置OB91的循环时间 (10)3.2S120配置 (11)3.2.1S120基本组态 (11)3.2.2S120通讯相关参数设置 (11)3.3设备调试 (13)4文章声明 (14)1 摘要本文主要介绍了如何使用S7-1500PLC连接SINAMICS S120伺服系统实现位置闭环控制。
其中对S7-1500相关模块的组态,工艺对象的组态,S120的相关参数设置作了简要介绍。
2 简介2.1 S7-1500运动控制功能S7-1500 运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。
并拥有轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和优化工作。
S7-1500支持多种连接方式。
可以使用PROFIBUS DP和PROFINET IO连接驱动装置和编码器,也可以使用模拟量输出模块(AQ)连接带模拟设定值接口的驱动装置并通过工艺模块(TM),读出编码器的信息。
本文中所涉及的例子就是使用PROFINET IO连接S120实现位置控制。
图2-1 连接方式示意2.2 SINAMICS S120SINAMICS S120 通过高度灵活的模块化设计能够满足客户的多种要求。
支持多种现场总线,各个传动组件之间采用独特的智能通讯连接技术——DRIVE-CliQ连接。
适用于高精度控制,高动态,复杂协同传动的场合。
使用S120的速度控制功能可以与S7-1500运动控制功能配合使用,通过PRFIBUS DP或者PROFINET IO接收S7-1500发送的控制字以及速度给定,并通反馈位置信号给S7-1500,在S7-1500PLC中实现闭环位置控制。
西门子SINAMICS S120 介绍与使用
功率模块 PM340:电源模块+电机模块
主要特征
适用于TN、 IT 和 TT电网
产品概述 主要特点 DC/AC 单元 AC/AC 单元 选型及价格比较
功率模块PM340
3AC400输入电压:功率从0.37到90 kW 1AC230输入电压:功率从0.12到0.75 kW
控制单元具有所有用于连接外围设备和高层控制组件的必要接 口
May.2006 Gu Hexiang, SLC A&D MC PM
9
Automation and Drives
Sinamics S120 DC/AC 电源模块SLM
运动控制器
Sinamics S120
产品概述 主要特点 DC/AC 单元 AC/AC 单元 选型及价格比较
供电电压 额定功率(kW) 宽度 (mm) 高度 (mm) 深度 (mm) 防护等级 冷却方式 环境温度
供电模块为直流母线供电
May.2006 Gu Hexiang, SLC A&D MC PM
10
Automation and Drives
Sinamics S120 DC/AC 电源模块ALM
运动控制器
运动控制器
Sinamics S120
各轴之间能快速进行数据交换
集成的Profibus-DP接口,容易和上位机连接
产品概述
能控制普通的三相异步机、同步机、扭矩电机及直线电机
主要特点 DC/AC 单元
友好的配置软件Sizer,由Sizer直接能输出SAP订单
图形化的调试软件Starter,能实时监控各过程变量及动态测试
供电模块提高了工作的可靠性和效率
May.2006 Gu Hexiang, SLC A&D MC PM
S120 的 自 学 习
S120 的自学习●以太网接口X127 上必须使用交叉电缆,系统规定一个控制单元上最多允许有24 个驱动对象。
矢量控制中最多可同时运行6 个驱动对象。
– V/f 控制中最多可同时运行12 个驱动对象。
●p0009 = 30 设备调试参数筛选1) 1●0 就绪● 1 设备配置●30 参数复位● 2. p0976 = 1●●●●●关于s120的ALM,BLM,和SLM的解析如下:●●1、ACTIVE infeed :就是俗称的AFE(有源前端),在S120中叫ALM。
其本质就是电力电子变换技术中的高频整流。
内含两套IGBT全桥,具备整流、逆变双重功能,既可以将交流侧能量整流成直流,又可以将直流逆变成交流回馈电网,且电压、电流之间的电角度可以任意调整,所以可以做到功率因数在-1~+1之间任意可调。
且谐波含量很低。
2、SMART infeed:可回馈型电源模块,兼具整流、逆变两种功能。
不过功率因数不能任意调整,谐波含量比ALM要高。
3、Basic infeed:基本BLM电源模块,只具有整流功能,不可回馈,由二极管或者可控硅构成。
4.ALM可以用12脉,做成主从控制方式,可以看功能图8940即可。
SLM功率元器件是IGBT,他的触发同步是靠CU来同步的,所以必须得不同的CU控制,BLM不是CU同步的所以无所谓。
ALM也得用两个CU来做12脉动。
5.SLM肯定和回馈有关,因为IGBT的触发是靠CU来同步的。
ALM整流本身就需要开通IGBT,所以他整流和回馈都需要用CU同步,BLM因为他是可控硅,他的触发和CU无关,所以一个就可以了。
最大的BLM是二极管的另说。
6.S120的ALM的谐波和功率因素本来就很好,6脉动跟其他的12脉动相当,所以没必要并成12脉的。
由于各个BLM自身产生触发脉冲来控制晶闸管,不是由控制单元进行同步的,所以12脉动并联时可以使用一个控制单元来控制。
但SLM是靠控制单元来同步,需要两块CU。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如何实现S120 主从控制方案
1 主从控制方案概述
在变频器的实际使用过程中,经常由于工艺的要求或者变频器容量的限制,会采用一个
传动设备是由两个或多个电机驱动共同配合工作的方案,这种情况下,各驱动电机之间需要
保证相同的运行速度,以及转矩的平均分配,为此,我们需要在驱动电机的变频器上实现需
要的速度及转矩分配控制要求,变频器的这种应用我们称之为主从控制应用。
针对主从控制应用的方案,我们通常在变频器上采用如下两种控制方法来实现:
直接转矩分配
速度偏差与转矩限幅
1.1直接转矩分配
直接转矩分配方案主要应用于电机之间是硬连接方式,如齿轮、同轴等,电机之间通过连
接器保持相同的转速,如下图:
图1
在配置直接转矩控制方式时,需要将主机设定在速度模式工作,从机设定在转矩模式工作,
将主机的转矩设定值作为从机的转矩给定值,这样保证系统运行时,从机转矩始终与主机一
致,同时因为机械结构的原因,从机速度始终与主机相同,这样就完成了转矩的分配。
该方式的特点是,从机转矩始终跟随主机转矩,系统按照主机的速度环运行,转矩响应比较
快。
1.2速度偏差与转矩限幅
速度偏差与转矩限幅的方案主要应用于电机之间软连接方式,如皮带、绳索等,由于是
柔性材料产生的耦合关系,电机之间需要有相同的运行速度,同时保证电机力矩的均匀分配,
还要有防止连接断裂时的保护。
图2
在速度偏差与转矩限幅方式时,主机从机都工作在速度模式,主从机的速度设定值相同,
然后从机在此基础上附加+/- 5%-10%左右的速度偏差(与运行方向有关,附加速度大小由实
际情况决定),将主机的转矩值连接到从机的转矩限幅上。在启动后,由于速度偏差的存在,
连接的材料迅速拉紧,从机的速度环饱和,输出的转矩受转矩限辐限制,从而保证从机的转
矩跟随主机的转矩;从机速度受到连接的牵引,与主机速度相同。当发生断带时,主从电机
工作在各自的速度环模式下,不会发生飞车现象。
该模式的特点是,启动瞬间主机从机的速度环都起作用,张力的建立比较平缓,避免系
统产生振荡。既保证了速度及转矩的分配,也对系统进行了保护。
2 S120系统的主从控制方案的配置
实际使用过程中,根据使用的设备类型不同,常见的有几种不同的硬件配置方案。
2.1 CU310主从配置
使用CU310作为控制单元,主从数据交换可以通过如下两种方法:
PROFIBUS DP的SLAVE TO SLAVE通讯;
通过TM31端子模块DI/DO和AI/AO;
a. PROFIBUS DP连接到PLC上(见图3),此时可以借助PROFIBUS DP的SLAVE
TO SLAVE通讯,实现两个S120设备之间的数据交换,具体操作说明请参考下面链
接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=4390
图3
b. 通过TM31端子模块互相连接(图4),使用DI/DO和AI/AO完成数据交换。模拟
量信号最好使用电流信号,采用双绞屏蔽电缆,抗干扰性比较强。
图4
2.2 CU320主从配置
使用CU320作为控制单元,主从数据交换可以通过如下几种方法:
PROFIBUS DP的SLAVE TO SLAVE通讯;
通过TM31端子模块DI/DO和AI/AO;
Sinamics Link通讯;
TB30端子扩展板的DI/DO和AI/AO;
CU320的多轴直接连接;
a. PROFIBUS DP连接到PLC上(见图5),此时可以借助PROFIBUS DP的SLAVETO
SLAVE通讯,实现两个S120设备之间的数据交换,具体操作说明请参考下面链接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=4390
图5
b. 通过TM31端子模块互相连接(图6),使用DI/DO和AI/AO完成数据交换。模拟
量信号最好使用电流信号,采用双绞屏蔽电缆,尽量减少被干扰的可能性。
图6
c. 通过在CU320扩展插槽增加CBE20通讯板,使用装置间主从通讯Sinamics Link网络
(图7),具体配置方法见下面链接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=5830
图7
d. 通过在CU320扩展插槽增加TB30端子板,使用I/O端子来实现数据交换(图8),
但是TB30模拟量信号只支持电压型信号,需要注意可能发生的干扰问题。
图8
e. 在一个CU320单元连接多个驱动轴的情况下,直接利用轴间变量的互连(图9),来
实现主从控制的数据交换,该种方式下,当CU出现故障,两台设备都将无法运行。
图9
3 S120系统的主从控制方案的配置
3.1 基本调试
在进行主从控制配置时,首先需要完成基本驱动单元的调试,具体步骤参见调试手册:
http://www.ad.siemens.com.cn/download/SearchResult.aspx?searchText=a0439
图10 建立项目
3.2 配置主从通讯方式
根据实际使用的主从通讯方式,定义传输的数据,下表以网络通讯为例的主从通讯数
据表(仅作参考,实际设定根据需要定义):
主机发送 主机接收 从机发送 从机接收
控制字 从机状态字 状态字 主机控制字
状态字 自定义 自定义 主机状态字
转矩设定值 主机转矩设定值
速度设定值 主机速度设定值
自定义 自定义
3.3 配置主从工作模式
完成基本调试后,确定电机的优化、运行都正常后,根据配置的主从方案,来进行主从
工作模式的设置。
3.3.1 配置直接转矩分配方式
在直接转矩工作模式时,主机工作在速度模式,从机工作在转矩模式,而从机设定为转
矩控制方式共有两种不同的方法:
a. 通过参数直接选择转矩工作模式
选择从机转矩工作模式P1300=22 or 23(图11),
图11 电机工作模式设定
然后在转矩的给定值P1503处()选则主机的转矩设定值r079(实际值r080也可以,
但是设定值相对波动小)(图12)。
图12
将从机的控制字命令源连接到主机的控制字,用来得到相同的启动逻辑,保证主从设备
的同时启动、停止,并实现故障保护。(图13 )
图13
b. 通过参数切换,旁路速度调节器的输出到转矩直接设定
选择从机转矩工作在速度模式,P1300=20 or 21,然后设定P1501切换速度模式到转矩
模式,P1503转矩设定源链接主机的转矩设定r079(图15),
图15
3.3.2 速度偏差与转矩限幅方式
在速度偏差与转矩限幅时,主机从机都工作在速度模式,P1300=20or 21,从机的设定速
度在主机设定速度的基础上附加一个偏差速度∆V(通常10%,仅作参考),超前或滞后的
关系由实际的电机位置决定见下图:
图16
A方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-∆V;
B方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+∆V;
C方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+∆V;
D方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-∆V;
然后设定转矩限幅的源P1522连接到主机的转矩设定值r079(如图17)
图17
当启动后,由于速度偏差的存在,从机与主机间的材料迅速拉紧,从机的速度环快速进
入饱和状态,输出转矩由转矩限幅决定,从而实现了主从负荷分配。
同时对于可能断带的材料,该方式起到很好的保护作用。当材料断开,从机从速度环快速退
饱和,转入速度闭环,不会导致飞车。