中国矿业大学机电学院 带传动 c++
刮板输送机的发展现状和趋势

刮板输送机的现状及发展趋势学院: 机电学院班级: 机自07-9班姓名:学号:2010年12月刮板输送机的发展现状与趋势(中国矿业大学机电学院机自07—9班)摘要: 通过对我国刮板输送机产品结构、系列、配置的分析,和我国刮板输送机发展现状与国外产品进行对比,得出未来几年我国刮板输送机发展的趋势。
关键词: 刮板输送机; 现状;结构;差距; 趋势Abstract:Pass to pare off plank to transport the machine product structure, series to the our country, allocation of analysis, and our country pare off plank to transport a machine development the present condition and foreign product carry on contrast, get future several year our country pare off the trend that the plank transports a machine development.Key words:Pare off plank to transport machine;Present condition, structure, margin;Trend刮板输送机作为煤矿工作面运输设备,不但担负着运煤的作用,还是采煤机的运行轨道以及液压支架的推移支点。
在设备使用过程中还要悬挂工作面设备的电缆、水管等。
所以,刮板输送机的可靠、稳定、高效运行将直接影响着矿井的生产能力和煤矿企业的经济效益。
一、目的和意义充分利用利用学校教学资源优势,为学生提供广阔的科研训练平台,培养学生研究工作的基本能力,提高掌握信息,复习文献的能力,增强学生科学论文撰写发表的能力,为培养高素质创新型人才及以后的毕业设计奠定良好的基础。
矿山机电专业毕业论文

毕业设计(论文)任务书专业矿山机电班级2011学号姓名王正新毕业设计(论文)题目带式输送机设计设计期限:自2014年8月17日至2014年9月14 日指导老师:系主任:2014 年9 月14 日目录摘要.............................. 错误!未定义书签。
绪论 (2)1.带式输送机的技术发展 (3)2 带式输送机的初步设计 (6)3带式输送机电控设计 (11)结束语 (17)致谢 (18)参考文献 (19)带式输送机是煤矿最理想的高效连续运输设备,与其他运输设备(如机车类)相比,具有输送距离长、运量大、连续输送等优点,而且运行可靠,易于实现自动化和集中化控制。
带式输送机是输送能力最大的连续输送机械之一。
其结构简单、运行平稳、运转可靠、能耗低、对环境污染小、管理维护方便,在连续装载条件下可实现连续运输。
本论文主要涉及了带式输送机的机械设计和电气原理设计部分。
带式输送机的机械设计分两步,第一步是初步设计,主要是通过理论上的计算选出合适的输送机部件。
其中包括输送带的类型和带宽选择、带式输送机线路初步设计、托辊及其间距的选择、滚筒的选择、电动机、减速器、盘闸制动器、软起动装置的选择等;第二步是施工设计,主要根据初步设计选定的滚筒、托辊、驱动装置完成对已选部件的安装与布置的图纸设计工作。
最后,在机械设计的基础上,完成了对输送机的保护装置及其电气原理设计。
电气控制主要通过以可编程控制器为核心的电气系统实现的。
关键词:带式输送机;驱动装置;可编程控制器带式输送机是输送能力最大的连续输送机械之一。
其结构简单、运行平稳、运转可靠、能耗低、对环境污染小、便于集中控制和实现自动化、管理维护方便,在连续装载条件下可实现连续运输。
它是运输成件货物与散装物料的理想工具,因此被广泛用于国民经济各部门,尤其在矿山用量最多、规格最大。
1880年德国LMG公司设计了一台链斗挖掘机,其尾部带一条蒸气机驱动的带式输送机。
中国矿业大学_矿井通风与安全_课堂笔记第4章
矿井通风与安全课堂笔记4章第四章 通风动力本章重点与难点1、自然风压的产生、计算、利用与控制2、轴流式和离心式主要通风机特性3、主要通风机的联合运转4、主要通风机的合理工作范围欲使空气在矿井中源源不断地流动,就必须克服空气沿井巷流动时所受到的阻力。
这种克服通风阻力的能量或压力叫通风动力。
由第二章可知,通风机风压和自然风压均是矿井通风的动力。
本章将就。
对这两种压力对矿井通风的作用、影响因素、特性进行分析研究,以便合理地使用通风动力,从而使矿井通风达到技术先进、经济合理,安全可靠。
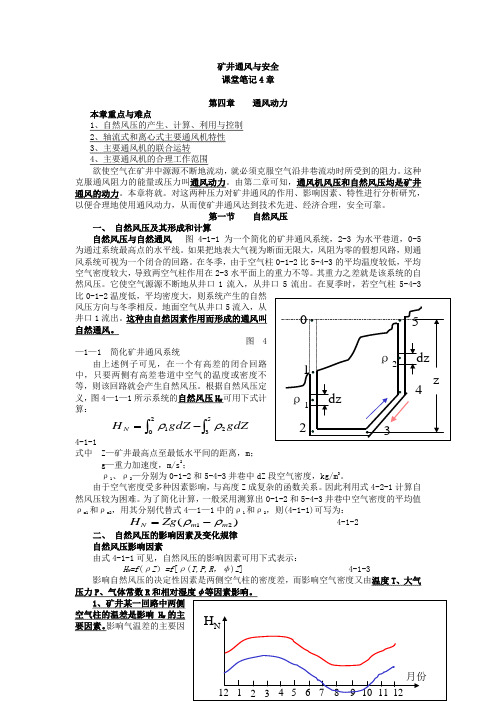
第一节 自然风压一、 自然风压及其形成和计算自然风压与自然通风 图4-1-1为一个简化的矿井通风系统,2-3为水平巷道,0-5为通过系统最高点的水平线。
如果把地表大气视为断面无限大,风阻为零的假想风路,则通风系统可视为一个闭合的回路。
在冬季,由于空气柱0-1-2比5-4-3的平均温度较低,平均空气密度较大,导致两空气柱作用在2-3水平面上的重力不等。
其重力之差就是该系统的自然风压。
它使空气源源不断地从井口1流入,从井口5流出。
在夏季时,若空气柱5-4-3比0-1-2温度低,平均密度大,则系统产生的自然风压方向与冬季相反。
地面空气从井口5流入,从井口1流出。
这种由自然因素作用而形成的通风叫自然通风。
图4—1—1 简化矿井通风系统 由上述例子可见,在一个有高差的闭合回路中,只要两侧有高差巷道中空气的温度或密度不等,则该回路就会产生自然风压。
根据自然风压定义,图4—1—1所示系统的自然风压H N 可用下式计算:gdZ gdZ H N ⎰⎰-=532201ρρ4-1-1式中 Z —矿井最高点至最低水平间的距离,m ;g —重力加速度,m/s 2;ρ1、ρ2—分别为0-1-2和5-4-3井巷中dZ 段空气密度,kg/m 3。
由于空气密度受多种因素影响,与高度Z 成复杂的函数关系。
因此利用式4-2-1计算自然风压较为困难。
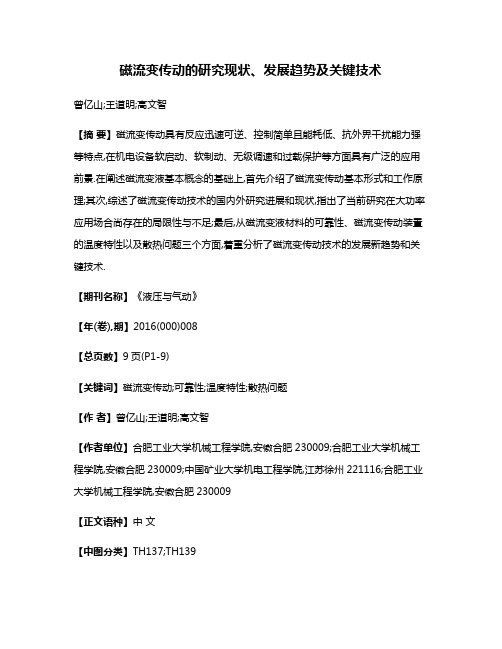
为了简化计算,一般采用测算出0-1-2和5-4-3井巷中空气密度的平均值ρm1和ρm2,用其分别代替式4—1—1中的ρ1和ρ2,则(4-1-1)可写为:H Zg N m m =-()ρρ12 4-1-2二、 自然风压的影响因素及变化规律自然风压影响因素由式4-1-1可见,自然风压的影响因素可用下式表示:H N =f (ρZ )=f [ρ(T,P,R ,φ)Z ] 4-1-3影响自然风压的决定性因素是两侧空气柱的密度差,而影响空气密度又由温度T 、大气压力P 、气体常数R 和相对湿度φ等因素影响。
机电传动控制第三版课后答案

习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TL TM TLNTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TL TM TL TM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
磁流变传动的研究现状、发展趋势及关键技术
磁流变传动的研究现状、发展趋势及关键技术曾亿山;王道明;高文智【摘要】磁流变传动具有反应迅速可逆、控制简单且能耗低、抗外界干扰能力强等特点,在机电设备软启动、软制动、无级调速和过载保护等方面具有广泛的应用前景.在阐述磁流变液基本概念的基础上,首先介绍了磁流变传动基本形式和工作原理;其次,综述了磁流变传动技术的国内外研究进展和现状,指出了当前研究在大功率应用场合尚存在的局限性与不足;最后,从磁流变液材料的可靠性、磁流变传动装置的温度特性以及散热问题三个方面,着重分析了磁流变传动技术的发展新趋势和关键技术.【期刊名称】《液压与气动》【年(卷),期】2016(000)008【总页数】9页(P1-9)【关键词】磁流变传动;可靠性;温度特性;散热问题【作者】曾亿山;王道明;高文智【作者单位】合肥工业大学机械工程学院,安徽合肥230009;合肥工业大学机械工程学院,安徽合肥230009;中国矿业大学机电工程学院,江苏徐州221116;合肥工业大学机械工程学院,安徽合肥230009【正文语种】中文【中图分类】TH137;TH139传统机械传动包括齿轮传动、链传动、带传动和蜗杆传动等,它们能够传递较大扭矩且传动比较精确,通常适用于定比传动,但其振动和噪声较大;液压传动利用液体介质来传递动力,通过改变工作压力实现输出转速的无级调节,可有效减小接合和分离过程中的冲击和振动,但调速过程中损失功率较大、效率较低;液体黏性传动是一种新型流体传动形式,利用摩擦副间油膜的剪切作用来传递动力,通过改变油膜厚度实现无级调速,具有调速性能好、工作稳定和效率高等优点[1],但其启动电流大、发热严重、摩擦片寿命短、系统复杂且制造和维护成本高[1]。
为弥补上述传动形式存在的不足,采用表观黏度变化范围大且响应迅速、过程可逆及易于控制的新型传动介质磁流变液来实现动力传递具有十分重要的现实意义。
本研究首先介绍了磁流变传动基本形式和工作原理;其次,综述了磁流变传动技术的国内外研究现状,指出了当前研究在大功率传动领域尚存在的问题与不足;最后,着重分析了磁流变传动技术的发展新趋势和关键技术。
《机电设备概论》期末考试卷(含答案)

淮南文汇职业中专学校二〇一一年秋学期期末考试《机电设备概论》A试卷满分:110分时间:120分钟制卷人:卢彬一、填空题(每空1分,共15分)1、自20世纪初起,__________已成为驱动各种机械的基本动力。
2、机电设备按用途可以分为三类:即_______类、信息类和民生类。
3、机电设备一般由设备的本体和_______________部分构成。
4、_______________简称PLC,广泛的应用于性能较为先进的机电设备控制系统中。
5、金属切削机床是制造机器的机器,因此又被称为_______________。
6、车床的主运动和进给运动是形成被加工表面形状的必需运动,称为__________运动。
7、CA6140型车床的电气控制系统采用了_______________控制方式。
8、数控铣床的结构特征,体现在其主轴特征和控制铣床运动的__________特征两方面。
9、JCS—018型立式加工中心,是一种具有自动换刀装置的CNC数控_______________。
10、AGV运行轨迹通常采用_______________制导。
11、某电梯的型号为“TKJ1000/1.6——JX”,该电梯的额定载重量为_______kg。
12、电梯使用的拽引钢丝绳,采用_______作为芯子。
13、喷墨和激光打印机均属于_______式打印机。
14、静电复印的原理:利用光导体在光照后改变其_______________。
15、用_______来减少物体摩擦表面间的摩擦和磨损或其他形式的表面破坏的方法叫润滑。
二、单项选择题(每小题1分,共20分)1、现代机电设备使用_____提供动力。
A、人力、畜力B、蒸汽C、普通电动机D、控制电动机2、下列哪一项不属于传统机电设备的功能实现部分?A、原动部分B、本体C、传动部分D、工作部分3、下列对带传动的描述中,错误的一项是_____A、带传动利用传动带作为中间的挠性件,依靠传动带与带轮之间的摩擦力来传递运动B、常见的有平带传动、V带传动、圆带传动和同步带传动C、带传动可以把主动件的回转运动变成从动件的直线往复运动D、带传动具有传动平稳,无噪声的优点4、下列对PLC的描述中,错误的一项是_____A、由中央处理器、输入\输出模块、编程器、外围设备和电源组成B、编程方程比较简单,程序可读性强C、抗干扰性强,运行可靠,可以在恶劣环境中使用D、采用模块式结构,组态灵活,维修费用高5、下列对CA6140型卧式车床的描述中,错误的一项是_____A、我国设计制造的一种普通卧式车床,在我国机械加工业中使用极为广泛B、工件的最大加工长度有750mm、1000mm、1500mm和2000mm四种C、结构简单,自动化程度低,加工过程中的辅助时间较多D、适用于单件、小批生产及修理车间使用6、数控的符号是_____A、CPUB、NCC、ROMD、MDI7、数控钻、铣、镗、磨床均属于_____数控车床A、金属切削B、金属成型C、特种加工D、其他类类类类8、TND360型数控车床可以安装_____种刀具A、7B、8C、9D、109、RGV和AGV分别表示_____A、有轨和无轨小车B、无轨和有轨小车C、有轨和随行夹具D、托盘和随行夹具10、工位数少,精度不高的小型组合机床的自动生产线上的随行夹具的返回方式是_____A、上方返回B、下方返回C、水平返回D、垂直返回11、_____制导的AGV是AGV的未来发展方向A、电磁感应B、感应C、光学D、激光束12、载货电梯属于_____电梯A、超高速B、高速C、中速D、低速13、下列对电梯主要参数的描述中,错误的一项是_____A、轿厢尺寸(mm):宽×深×高B、额定载重量(Kg):设计规定的电梯载重量C、额定速度(m/s):1—5 m/sD、井道尺寸(mm):宽×深14、拽引电动机采用的是_____A、直流电动机B、交流电动机C、同步电动机D、异步电动机15、银行和税务部门打印发票的打印机属于_____A、针式打印机B、喷墨打印机C、激光打印机D、一体机16、下列对传真机的描述中,错误的一项是_____A、传真机属于通信类设备B、传真机属于办公用机电类设备C、传真机按照用途可以分为相片传真机、报纸传真机气象传真机和文件传真机D、按传送机的传送色调可以分为黑白和彩色传真机17、彩色复印机复印大幅面(A1)采用的方法是_____A、静电复印法B、银盐照相法C、喷墨法D、热转印法18、当复印机出现卡纸故障时,可初步判断为_____A、定影系统故障B、转印系统故障C、分离系统故障D、清洁系统故障19、下列哪一项不属于设备润滑“五定”中的内容?A、定点B、定质C、定人D、定油20、我国一些企业实行的“设备三级保养,大修制”属于_____A、状态监测修理B、事后修理C、定期修理D、彻底修理三、多项选择题(每小题2分,共10分;多选、错选和少选超过1个均不得分)1、下列哪些项是异步电动机的优点?A、结构简单;制造、使用、维护方便;运行可靠;质量小、成本低B、在负载内能保持恒速运行,满足大多数生产机械的要求C、采用单相电源或低压直流电源供电D、主要用于专用或特殊用途的机电设备上E、便于派生成各种防护型式,适应不同环境的需求F、功率因数可调整2、目前,监测装置电路具有哪些功能?A、自动校准B、自动更新C、自动定时测量D、自动误差修正E、故障自检F、自修3、金属切削机床的技术性能包括_____A、工艺范围B、技术规格C、加工精度和表面质量D、生产效率和自动化程度E、精度保持性F、维修性能4、数控机床的特点有哪些?A、加工精度高B、加工生产率高C、减轻劳动D、具有良好强度、改善劳动条件的经济效率E、有利于生产管理的现代化F、制造成本低5、静电复印的过程包括下列哪些环节?A、充电B、曝光、显影C、转印、分离D、定影E、消电F、清洁四、判断题(每小题1分,共10分)1、电动机是根据电磁感应原理和电磁力原理工作的。
基于PLC的煤矿皮带控制系统
中国矿业大学本科生毕业设计姓名:宋建磊学号:学院:应用技术学院专业:电气工程及其自动化设计题目:基于PLC的煤矿皮带控制系统专题:指导教师:刘建华职称:讲师2009年 6 月徐州中国矿业大学毕业设计任务书学院应用技术学院专业年级电气05-1班学生姓名宋建磊任务下达日期:2009年 3 月8 日毕业设计日期:2009 年3月9日至2009 年 6 月15 日毕业设计题目:基于PLC的煤矿皮带控制系统毕业设计专题题目:毕业设计主要内容和要求:在了解煤矿井下皮带运输机的控制要求基础上,基于PLC实现皮带及给煤机的集中监控系统。
具体要求如下:1.在分析煤矿井下胶带运输机控制系统的功能需求基础上,基于PLC构造单条皮带控制系统框图;2.基于单条皮带控制系统构造多条皮带集控系统框图;3.完成单条皮带控制系统设备选型及PLC编程;4.基于组态软件构造集控系统主机界面。
院长签字:指导教师签字:中国矿业大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;④工作量的大小;⑤取得的主要成果及创新点;⑥写作的规范程度;⑦总体评价及建议成绩;⑧存在问题;○9是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;④工作量的大小;⑤取得的主要成果及创新点;⑥写作的规范程度;⑦总体评价及建议成绩;⑧存在问题;○9是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩摘要为了保证煤矿井下运输系统的安全、高效、可靠运行,对井下皮带输送机进行自动控制对提高煤矿自动化管理水平具有重要意义。
机械设计基础课程设计
课程设计
纪律要求
要求全部同学在设计教室完成课程设 计内容,并作为总成绩考核指标之一
热能10-1、2: 热能10-3、4:程志红
课程设计
参考资料
1 主教材 2 3 4 机械设计课程上机与设计,东南大学出版社 机械设计课程设计图册,哈尔滨工业大学 实用机械设计手册. 中国矿业大学出版社
5
机械设计课程设计指导书(各校皆有出版)
课程设计
设计过程
1. 设计准备 1)研究设计任务书,明确设计要求、条件、内容和步骤 2)了解设计对象 3)复习课程有关内容 4)准备设计需要的图书、资料和工具 2. 传动装置的总体设计
1)决定传动装置的方案
2)计算电动机功率,确定电动机型号
3)计算传动装置的运动和动力参数
课程设计
设计过程
3. 装配图设计
1-料斗; 2-滚筒; 3-减速器; 4-带传动; 5-电动机
课程设计
课程设计
设计题目
2. 机械厂装配车间输送带传动装置设计(题目B)
设计内容: 1)电动机选型 2)带传动传动比设计 3)联轴器选型设计
4)减速器设计
1-输送带; 2-电动机; 3-V带传动; 4-减速器; 5-主动滚筒
二级展开式圆柱齿轮传动
(1)为保证减速器支承刚度,箱体轴承座处应有足够的厚度,并设置加强肋。
(2)轴承旁联接螺栓凸台结构设计要有利于提高轴承座孔的联接刚度,轴承座孔两侧 联接螺栓应尽量靠近轴承,以不与箱体上固定轴承盖的螺纹孔及箱体剖分面上油沟 发生干涉为准。通常取两联接螺栓中心距与轴承盖外径相近,凸台的高度由联接螺 栓的扳手空间确定
1.2δ 8~15
1.2δ
载荷作用齿宽中 点
课程设计第二阶段任务:装配图设计
2017年中国矿业大学(徐州)中国矿大 初试自命题科目 机电学院 硕士研究生考试大纲
808
机械原理
二、 考试范围
大学出版社, 机构的受力分析。 2005 年。
布丁考研网,在读学长提供高参考价值的复习资料
7 机械的运转及其速度波动的调节 机械运动微分方程的建立及其求解方法, 稳定运转状态下机械的周期 性速度波动及其调节方法。 8 平面连杆机构及其设计 平面四杆机构的类型和应用,平面四杆机构的基本知识与传动特征,平面四杆 机构的设计,多杆机构的传动特点和应用。 9 凸轮机构及其设计 凸轮机构的应用和分类,推杆常用的运动规律及特性,盘形凸轮轮廓线的设计,盘 形凸轮机构基本尺寸的确定。 10 齿轮机构及其设计 齿轮机构的类型、特点及其齿廓曲线选择,渐开线齿廓及其啮合特点,渐开线标 准齿轮的基本参数和几何尺寸,渐开线直齿圆柱齿轮的啮合传动,渐开线齿廓的切削原理与根切现象,渐 开线变位齿轮传动特点,斜齿圆柱齿轮传动、直齿圆锥齿轮传动和蜗杆传动的基本参数及传动特点。 11 齿轮系及其设计 齿轮系及其分类,定轴轮系、周转轮系和复合轮系传动比的计算,轮系的功用,行 星轮系的效率、类型选择及设计的基本知识。 12 其他常用机构 其他常用机构的类型与传动特点。 13 工业机器人机构及其设计 工业机器人操作机的分类及主要技术指标,工业机器人的应用。 14 机械系统的方案设计 机械设计的一般过程,机械系统方案设计的一般步骤和方案的拟定。
三、 试题结构
考试时间为 3 小时,试题类型包括填空题、分析计算题、设计分析题、图解分析题、应用分析题等。
四、 考试工具
允许带无存储功能的计算器、绘图仪器(三角板、圆规、量角器等)
布丁考研网,在读学长提供高参考价值的复习资料
一、考试目的与要求 测试考生掌握测试技术的基本原理和基本方法,以及对测试信号分析和数据处理的能力。考生应掌握静 动态测试及信号分析的基本原理和方法,初步具备进行机械工程中常见参量测量的能力。 二、考试范围 1.测试信号的分类,信号的时域和频域描述方法;相关分析和频谱分析的基本原理和方法,数字信号 分析中的基本概念和基本方法。 《测试技术 2.常用测试装置的静态、动态特性评价方法和不失真测试条件以及一阶、二阶系统动态特性的测定方 与实验方法》 法。 (第 3 版) , 王启广,陈军 3.常用传感器的基本变换原理以及传感器的典型应用,合理选用传感器。 主编,中国矿 4.常用测试信号调理方法的基本原理和应用。 业大学出版 社,2009 年; 5.机械工程中常用参量的测试原理和方法。 《 测 试 技 术》 ,王启广 主编,中国矿 业大学出版 社,2011 年。 三、试题结构(包括考试时间,试题类型等) 考试时间:3 小时 试题类型: 1.单项选择题 2.填空题 3.计算题 4.分析论述题
ELectromechanical Drive Control机电传动控制
《机电传动控制》陈军中国矿业大学出版社IntroductionElectromechanical Drive in generalis the system,in which the motor is the prime mechanism to drive the machinery.(联系课本p1图0-1和机械设计PPTThe composition of a machine 相关知识)In addition to study The basic principles and characteristics of the motor, this course introduce the techniques about start启动,speed control and brake制动of the DC and AC motors.Electric machinery 电机=Generator发电机+Motor电动机(二者原理上可逆,electrical energy电能,mechanical energy机械能,turn X into X)The basic knowledge1.ConceptsMechanical properties机械特性——The relationship between torque转矩(T) and Rotational Speed转速(n) on the same shaft. We can show it by Formulas n=f(T) and n—T diagram.2.Motor state电机状态:Stable operation稳定运行,start ,speed control and brake3.Type of motor:1)DC motor,2)AC motor——Asynchronous异步electric motor, Synchronous同步electricmotor(control motor: servo motor伺服电机,stepping motor步进电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//机自10-8班张清#include<iostream.h>#include "math.h"#include "stdio.h"#define pi 3.1415926main(){float n2,n1,u,lh,k,pc,p,x,y ,v,c1,c2,a,a1,a0,lc,lj,l,b,al,kl,ki,p1,p0,z,f0,fp,d2,e,amax,amin; double ka;float cc[5];int i,j,m,g,s,t=1;static float aa[6][17]={{0,0.00039,0.06,0.246,7.44,4.41e-5,0.72,0.00043,9.8e-08,435,50,63,71,80,90,1,13},{0,0.00103,0.1,0.449,19.62,7.65e-5,0.68,0.000225,2.25e-08,100,75,90,100,112,125,5,18},{0,0.00265,0.17,0.794,50.6,1.31e-4,0.68,0.000174,1.94e-08,27,125,140,150,170,180,8,24},{0,0.0075,0.3,1.48,143.2,2.43e-4,0.70,0.00964,4.48e-7,7.2,200,224,236,265,280,14,29},{0,0.0266,0.62,3.15,507.3,4.77e-4,0.78,3.38e-5,0,0.92,355,400,425,475,500,18,32},{0,0.0498,0.9,4.57,951.5,7.06e-4,0.706,4.95e-5,1.254e-9,0,500,560,630,800,900,22,33}};static char bb[6]={'Z','A','B','C','D','E'};static int ll[34]={0,400,450,500,560,630,710,800,900,1000,1120,1250,1400,1600,1800,2000,2240,2500,2800,3150,3550,4000,4500,5000,5600,6300,7100,8000,9000,10000,11200,12500,14000,16000};cout<<"请输入已知数据:"<<endl;cout<<"功率P(KW)=";cin>>p;cout<<"小轮转速n1(r/min)=";cin>>n1;cout<<"传动比i(若已知n2,则i=0)=";cin>>u;cout<<"大轮转速n2(r/min)(若已知i,则n2=0)=";cin>>n2;cout<<"给定中心距a(mm)(若未给定,则a=0)=";cin>>a;cout<<"中心距系数a0(0.7~2,若已知a,则a0=0)=";cin>>a0;cout<<"载荷性质G(平稳1,变动小2,变动大3,变动很大4)=";cin>>g;cout<<"启动类型s(空、轻载启动1,重载启动2)=";cin>>s;cout<<"小时数LH=";cin>>lh;if(n2!=0) u=floor(n1/n2*1000+0.5)/1000;else if(n2==0) n2=n1*u;if(s==1){ if(lh>16) k=1.2;else if(lh<=16&&lh>=10) k=1.1;else k=1.0;switch(g){case 1:k=k;break;case 2:k=k+0.1;break;case 3:k=k+0.2;break;case 4:k=k+0.3;break;}}else if(s==2){if(lh>16) k=1.3;else if(lh<=16&&lh>=10) k=1.2;else k=1.1;switch(g){case 1:k=k;break;case 2:k=k+0.1;break;case 3:k=k+0.3;break;case 4:{if(lh>=16)k=k+0.5;else k=k+0.4;};break;}}pc=k*p;cout<<"计算功率"<<pc<<"KW"<<endl;cc[0]=log10(365)+(log10(2510)-log10(365))*(log10(pc)-log10(0.8))/(log10(5)-log10(0.8)); cc[1]=log10(100)+(log10(1500)-log10(100))*(log10(pc)-log10(1))/(log10(10)-log10(1));cc[2]=log10(100)+(log10(870)-log10(100))*(log10(pc)-log10(3.15))/(log10(18)-log10(3.15)); cc[3]=log10(100)+(log10(700)-log10(100))*(log10(pc)-log10(9))/(log10(40)-log10(9));cc[4]=log10(100)+(log10(500)-log10(100))*(log10(pc)-log10(50))/(log10(200)-log10(50)); for(i=0;i<=4;i++){if(n1>=pow(10,cc[i])) break;}if(i==0) {x=0;y=1;}else if(n1<=pow(10,cc[4])) {x=4;y=5;}else {x=i-1;y=i+1;}for(i=x;i<=y;i++)for(j=10;j<=14;j++){v=floor(pi*aa[i][j]*n1/600+0.5)/100;if(v>=5 && v<=25){d2=aa[i][j]*u;c1=d2+aa[i][j];c2=d2-aa[i][j];if(a==0) a1=a0*c1;else a1=a;lc=2*a1+pi*c1/2+c2*c2/4/a1;for(m= aa[i][15];m<= aa[i][16];m++){if(lc<=ll[m]) break;}lj=(ll[m]+ll[m-1])/2;if(lc<lj) l=ll[m-1];else l=ll[m];b=2*l-pi*c1;a1=floor((b+pow(b*b-8*c2*c2,0.5))/8*10+0.5)/10;amin=floor(a1-0.015*l+0.5);amax=floor(a1+0.03*l+0.5);al=180-c2/a1*57.3;kl=aa[i][6]+aa[i][7]*l-aa[i][8]*l*l;float af[13]={120,125,130,135,140,145,150,155,160,165,170,175,180};double KA[13]={0.82,0.84,0.86,0.88,0.89,0.91,0.920,.93,0.95,0.96,0.98,0.99,1.00};if((al>=120)&&(al<=180)){int n=0;while(al>=af[n]){n++;}n=n-1;ka=(al-af[n])*(KA[n+1]-KA[n])/(af[n+1]-af[n])+KA[n];}else if(al<120){ka=0.82-(120-al)*(0.84-0.82)/(125-120);}else if(al>180){ka=1.00+(al-180)*(1.00-0.99)/(180-175);}switch(i){case 0:{float nn[10]={400,700,800,950,1200,1450,1600,2000,2400,2800};double dd[10][10]={{0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00}, {0.00,0.00,0.00,0.00,0.00,0.00,0.01,0.01,0.01,0.01},{0.00,0.00,0.00,0.00,0.01,0.01,0.01,0.01,0.02,0.02},{0.00,0.00,0.00,0.01,0.01,0.01,0.01,0.02,0.02,0.02},{0.00,0.00,0.01,0.01,0.01,0.01,0.01,0.02,0.02,0.03},{0.00,0.00,0.01,0.01,0.01,0.02,0.02,0.02,0.03,0.03},{0.00,0.01,0.01,0.01,0.02,0.02,0.02,0.02,0.03,0.03},{0.00,0.01,0.01,0.02,0.02,0.02,0.02,0.03,0.03,0.04},{0.01,0.01,0.02,0.02,0.02,0.02,0.03,0.03,0.04,0.04},{0.01,0.02,0.02,0.02,0.03,0.03,0.03,0.04,0.04,0.04}};double uu[10]={1.00,1.02,1.05,1.09,1.13,1.19,1.25,1.35,1.51,2.00};int i=0;while(n1>nn[i]){i++;}i=i-1;int j=0;while(u>uu[j]){j++;}j=j-1;p1=(n1-nn[i])*(dd[i+1][j]-dd[i][j])/(nn[i+1]-nn[i])+dd[i][j];break;}case 1:{float nn[10]={400,700,800,950,1200,1450,1600,2000,2400,2800};double uu[10]={1.00,1.02,1.05,1.09,1.13,1.19,1.25,1.35,1.51,2.00};double dd[10][10]={{0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00}, {0.01,0.01,0.01,0.01,0.01,0.02,0.02,0.02,0.03,0.03},{0.01,0.02,0.02,0.03,0.03,0.04,0.04,0.06,0.07,0.08},{0.02,0.03,0.03,0.04,0.05,0.06,0.06,0.08,0.10,0.11},{0.02,0.04,0.04,0.05,0.07,0.08,0.09,0.11,0.13,0.15},{0.03,0.05,0.05,0.06,0.08,0.09,0.11,0.13,0.16,0.19},{0.03,0.06,0.06,0.07,0.10,0.11,0.13,0.16,0.19,0.23},{0.04,0.07,0.08,0.08,0.11,0.13,0.15,0.19,0.23,0.26},{0.04,0.08,0.09,0.10,0.13,0.15,0.17,0.22,0.26,0.30},{0.05,0.09,0.10,0.11,0.15,0.17,0.19,0.24,0.29,0.34}};int i=0;while(n1>nn[i]){i++;}i=i-1;int j=0;while(u>uu[j]){j++;}j=j-1;p1=(n1-nn[i])*(dd[i+1][j]-dd[i][j])/(nn[i+1]-nn[i])+dd[i][j];break;}case 2:{float nn[10]={400,700,800,950,1200,1450,1600,2000,2400,2800};double uu[10]={1.00,1.02,1.05,1.09,1.13,1.19,1.25,1.35,1.51,2.00};double dd[10][10]={{0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00}, {0.01,0.02,0.03,0.03,0.04,0.05,0.06,0.07,0.08,0.10},{0.03,0.05,0.06,0.07,0.08,0.10,0.11,0.14,0.17,0.20},{0.04,0.07,0.08,0.10,0.13,0.15,0.17,0.21,0.25,0.29},{0.06,0.10,0.11,0.13,0.17,0.20,0.23,0.28,0.34,0.39},{0.07,0.12,0.14,0.17,0.21,0.25,0.28,0.35,0.42,0.49},{0.08,0.15,0.17,0.20,0.25,0.31,0.34,0.42,0.51,0.59},{0.10,0.17,0.20,0.23,0.30,0.36,0.39,0.49,0.59,0.69},{0.11,0.20,0.23,0.26,0.34,0.40,0.45,0.56,0.68,0.79},{0.13,0.22,0.25,0.30,0.38,0.46,0.51,0.63,0.76,0.89}};int i=0;while(n1>nn[i]){i++;}i=i-1;int j=0;while(u>uu[j]){j++;}j=j-1;p1=(n1-nn[i])*(dd[i+1][j]-dd[i][j])/(nn[i+1]-nn[i])+dd[i][j];break;}case 3:{float nn[10]={400,700,800,950,1200,1450,1600,2000,2400,2800};double uu[10]={1.00,1.02,1.05,1.09,1.13,1.19,1.25,1.35,1.51,2.00};double dd[10][10]={{0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00,0.00}, {0.04,0.07,0.08,0.09,0.12,0.14,0.16,0.20,0.23,0.27},{0.08,0.14,0.16,0.19,0.24,0.28,0.31,0.39,0.47,0.55},{0.12,0.21,0.23,0.27,0.35,0.42,0.47,0.59,0.70,0.82},{0.16,0.27,0.31,0.37,0.47,0.58,0.63,0.78,0.94,1.10},{0.20,0.34,0.39,0.47,0.59,0.71,0.78,0.98,1.18,1.37},{0.23,0.41,0.47,0.56,0.70,0.85,0.94,1.17,1.41,1.64},{0.27,0.48,0.55,0.65,0.82,0.99,1.10,1.37,1.65,1.92},{0.31,0.55,0.63,0.74,0.94,1.14,1.25,1.57,1.88,2.19},{0.35,0.62,0.71,0.83,1.06,1.27,1.41,1.76,2.12,2.47}};int i=0;while(n1>nn[i]){i++;}i=i-1;int j=0;while(u>uu[j]){j++;}j=j-1;p1=(n1-nn[i])*(dd[i+1][j]-dd[i][j])/(nn[i+1]-nn[i])+dd[i][j];break;}case 4:{float nn[7]={400,700,800,950,1200,1450,1600};double uu[10]={1.00,1.02,1.05,1.09,1.13,1.19,1.25,1.35,1.51,2.00};double dd[10][10]={{0.00,0.00,0.00,0.00,0.00,0.00,0.00},{0.14,0.24,0.28,0.33,0.42,0.51,0.56},{0.28,0.49,0.56,0.66,0.84,1.01,1.11},{0.42,0.73,0.83,0.99,1.25,1.51,1.67},{0.56,0.97,1.11,1.32,1.67,2.02,2.23},{0.70,1.22,1.39,1.60,1.09,2.52,2.78},{0.83,1.46,1.67,1.92,2.50,3.02,3.33},{0.97,1.70,1.95,2.31,2.92,3.52,3.89},{1.11,1.95,2.22,2.64,3.34,4.03,4.45},{1.25,2.19,2.50,2.97,3.75,4.53,5.00}};int i=0;while(n1>nn[i]){i++;}i=i-1;int j=0;while(u>uu[j]){j++;}j=j-1;p1=(n1-nn[i])*(dd[i+1][j]-dd[i][j])/(nn[i+1]-nn[i])+dd[i][j];break;}return p1;}p0=(aa[i][3]*pow(v,-0.09)-aa[i][4]/aa[i][j]-aa[i][5]*v*v)*v;z=floor(pc/((p0+p1)*kl*ka)+0.95);if(z>0&&z<=9&&al>=120){cout<<"第"<<t<<"方案"<<endl;cout<<"********start********"<<endl;f0=floor((500*pc*(2.5/ka-1))/v/z+aa[i][2]*v*v+0.5);fp=floor(2*z*f0*sin(al*pi/180/2)+0.5);cout<<"型号"<<bb[i]<<endl;cout<<"长度"<<l<<" 根数"<<z<<" 小轮直径"<<aa[i][j]<<" 大轮直径"<<d2<<" 速度"<<v<<" 传动比"<<u<<"包角"<<al<<endl;cout<<"中心距"<<a1<<" 最小中心距"<<amin<<" 最大中心距"<<amax<<" 最小初拉力"<<f0<<" 压轴力"<<fp<<endl;t=t+1;cout<<"********endl**********"<<endl;cout<<endl;cout<<endl;}}else if(v>=25) break;}}。