我所认识的应力应变关系
应力应变的关系

应力应变的关系
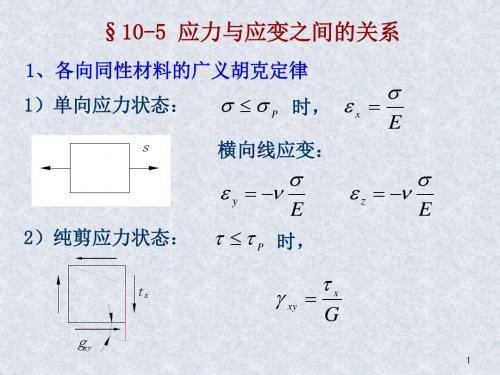
应力和应变是力学中的两个重要概念,它们之间存在着一定的关系。
应力是指物体在受到外部力的作用下产生的内部阻力,即单位面积上的力的大小。
应力可以分为三种:拉应力、压应力和剪应力。
拉应力是指在物体受到拉伸力的作用下产生的内部阻力;压应力是指物体在受到压缩力的作用下产生的内部阻力;剪应力是指在物体受到剪切力的作用下产生的内部阻力。
应变是指物体在受到外力作用下,因其分子重新排列或形变而产生的变形量,即单位长度的形变。
应变可以分为线性应变和剪切应变。
线性应变是指物体在受到拉伸或压缩力的作用下产生的长度变化;剪切应变是指物体在受到剪切力的作用下产生的形变。
应力和应变之间的关系可以通过物体的材料性质来描述。
弹性材料的应力和应变之间存在线性关系,即受到的应力与应变成正比。
这个比例常数称为弹性模量,用来描述物体的弹性性质。
对于非弹性材料,应力和应变之间的关系则更加复杂,通常需要使用材料的本构方程进行描述。
总之,应力和应变之间的关系取决于物体的材料性质,并可以通过弹性模量或材料的本构方程来描述。
应力与应变之间的关系
xy
1 G
xy
5
若用主应力和主应变来表示广义胡克定律,有:
1 2
3
1
E 1
E 1
E
1 2 3
2 1 1
3 3 2
二向应力状态:
设 3 0, 有
1
2
x , y , z , xy, yz , zx
2
正负号规定:正应变分量同前,拉为正、压为 负;切应变分量以使直角减小为正,反之为负。
对各向同性材料,在线弹性、小变形条件下,
正应力只引起线应变,切应力只引起切应变,应力 分量和应变分量的关系可由叠加原理求得:
三个正应力分量单独作用时,x方向的线应变为:
1
1 E
1
2
3
1
2
1 E
2
3
1
3
3
1 E
3
1
2
12
3、广义胡克定律的一般形式
x
1 E
[
x
(
y
z )]
x
z
zx zy
xz yz
xy
yx
y
y
1 E
[
y
( z
V1 V
V
1 2 3
b 1
3
c
a
也称为体积应变。 14
1
2
3
1
第五章 应力张量 应变张量与应力应变关系
1、 2、 3是方程(5-7)的三个根,所
以,也可以将特征方程写成
( 1 )( 2 )( 3 ) 0
展开后有 3 ( 1 2 3 ) 2 ( 1 2 2 3 3 1 ) 1 2 3 0
与式(5-7)比较,得
I1 I2
方程(7)有三组解:
第一组是 m0, n0
第二组是 m0, n1/ 2
第三组是 m1/ 2, n0
有了m、n就可以从(4)中求得相应的l,并运用
(5)式得到相应的极值剪应力 ,由(2)式
得到极值剪应力面上的正应力 。 同理可从(3)和(4)中分别消去m和n,按上述 方法又可以得到六组解,但其中三组是重复的, 独立的解答一共六组,如表5-1所示。 表中前三组解答对应于主平面,其上剪应力为零; 而后三组解答对应于经过主轴之一而平分其他两 主轴夹角的平面,如图5-5示,其上剪应力为
1 和 2 的方向可取与 ν (3) 垂直平面上的任
意方向。即与ν (3) 垂直的方向都是主方向。
如果 123,则 ν (1)ν (2)、ν (2)ν (3)、
ν (3)ν (1)三者可以是零,也可以不是零,这
说明三个主方向可以相互垂直,也可以不垂 直,也就是说,任何方向都是主方向。
(3)主应力的极值性 命题1:最大(或最小)主应力是相应点处任 意截面上正应力的最大(或最小)值。
r r
这就是极坐标下的应力分量与直角坐标下应力 分量的转换公式。
反过来,取直角坐标系为新坐标系,极坐标系 旧坐标系,根据(5-2)式,用极坐标应力分量 表示直角坐标应力分量的关系为:
x xrxrr xx 2xrxr
cos2 r sin2 2sin cosr
应力与应变关系演示文稿
(D)称为弹性矩阵,将应力与应变的关系写成矩阵形式:
D
第8页,共35页。
各向异性效应
{ } [D]{} 或 {} [ A]{ }
式中:{}为应力列阵;{}为应变列阵;[D] 、[A]为弹性矩阵。
c11c12c13c14c15c16
c21c22
c23c24
c25c26
[D]
c31c32c33c34c35c36
物体的弹性都相同。该平面称为弹性对称面,一般有3个这样的弹性
对称面。
a11a12a13o o o
对于正交各向异性体,由于对称关
a21a22a23o o o
系(正应力分量只产生线应变,不产
a31a32a33o o o
生剪应变)。因此,弹性矩阵中的36 个弹性常数中,有24个为0,在剩下的 12个只有9个是独立的。
x y z yz zx 0
x y z yz zx 0
xy
由广义虎克定律:
xy
G
xy
xy
G
第24页,共35页。
各向同性体的广义虎克定律: (用应力分量表示应变分量)
x
1 E
[
x
( y
z )];
y
1 E
[
y
( z
x )];
z
1 E
[
z
( x
第16页,共35页。
现在来确定各向同性材料独立的弹性常数的个数,设所取的坐标 为三个主轴方向,由广义虎克定律可以得到:
1 C111 C12 2 C133 2 C211 C22 2 C233 3 C311 C32 2 C333
Cij 表示在j轴方向的单位主应变所引起在i轴方向的主应力。
应变和应力关系

新能源技术:利用应变和应力原理,优化风力发电机叶片设计,提高风能 利用率和发电效率。
机器人技术:通过研究应变和应力与机器人关节运动的关系,提高机器人 的灵活性和稳定性,拓展机器人的应用领域。
应变和应力对未来科技发展的影响
增强材料性能:通过深入研究应变和应力,可以开发出性能更强的新型材 料,为未来的科技发展提供物质基础。
智能制造:利用应变和应力的知识,可以优化制造过程中的材料性能,提 高生产效率和产品质量,推动智能制造的发展。
生物医学应用:在生物医学领域,应变和应力的研究有助于更好地理解和 控制人体生理机制,为未来的生物医学应用提供支持。
压痕法:利用压痕仪在物体表面压出一定形状的压痕,通过测量压痕的尺寸来计算应力
应变和应力的相互影响
应变和应力之间的关系:应变是应力作用下的物体形状变化,应力是抵抗变形的力。
应变和应力的测量方法:通过应变计和应力计进行测量,应变计测量物体变形,应力计测量物 体受到的力。
应变和应力的相互影响:应变和应力之间存在相互影响,例如在材料屈服点附近,应变和应力 之间会发生突变。
应力的概念
分类:正应力、剪应力、弯 曲应力等
定义:物体受到外力作用时, 内部产生的反作用力
单位:帕斯卡(Pa) 作用效果:使物体产生形变
应变和应力的关系
应变是物体形状 的改变,应力是 物体内部抵抗变
形的力
应变和应力之间 存在线性关系, 即应变正比于应
力
应变和应力之间 的关系可以用胡 克定律表示,即 应力=弹性模量
应变和应力关系
汇报人:XX
应变和应力的定义 应变和应力的测量方法 应变和应力的应用领域 应变和应力的研究进展 应变和应力的未来展望
我所认识的应力与应变1
我所认识的应力与应变机械与动力工程学院动力工程专业学号602430107013 杨栋君一点的应力与应变是材料力学与弹塑性力学两门课程中两个非常重要的基本概念,材料力学主要讨论平面应力状态以及平面应力状态下的应变分析,而弹塑性力学则研究空间应力状态与应变状态。
我最先接触应力与应变是在材料力学的绪论中,材料力学中的应力首先是由研究构件(组成机械的零件或结构物的构件统称为构件,如建筑物的梁和柱,机床的轴等)截面处某一点的强弱程度而逐渐引入的。
应力定义为“单位面积上所承受的附加内力”。
材料力学中物体因受外力作用而变形,其内部各部分之间因相对位置改变而引起的相互作用称为内力,在m 上,围绕点取微小面积,上分布截面{ EMBED Equation.KSEE3 \* MERGEFORMAT |m内力的合力为(的方向和大小与点的位置和的大小有关),平均应力,代表在范围内,单位面积上内力的平均集度。
通过引入数学的极限法,随着的逐渐缩小,当趋于零时,平均应力的大小和方向都趋向于一定极限,即,称为点的应力。
应力是一个矢量,一般既不与截面垂直,也不与截面相切。
在弹塑性力学中,针对应力首先引入了体力(作用在物体微粒体积上的力)和面力(沿着物体表面的分布力)的概念。
可变形固体在外力等因素的作用下,其内部各部分之间就要产生相互的作用,内力指物体内的一部分与其相邻的另一部分之间相互作用的力。
应力就是载荷引起的物体内单位面积上的内力,表示内力在截面上某一点的分布集度。
这点与材料力学中的应力的定义基本一致。
但弹塑性力学中更细化的从空间(取平行于坐标面的3个两两垂直的微元平面)研究一点处的应力状态,当微元面趋于零时,上面作用的应力就代表过点任何截面上的应力,由爱因斯坦的求和约定引入了应力张量。
每一行为过点的一个面上的3个应力分量,便构成应力张量。
或者(应力张量的9个分量必须满足正交坐标系中二阶张量的变换公式)。
由此可以看出应力不是一个简单的矢量,它是对某点内力的精确描述。
应力应变关系
应力应变关系我所认识的应力应变关系一在前面两章的分别学习了关于应力与应变的学习,第三章的本构关系讲述了应力与应变的关系从而构成了弹塑性力学的本构关系。
在单向应力状态下,理想的弹塑性材料的应力应变关系及其简单满足胡克定律即,E ,,XX在三维应力状态下需要9个分量,即应力应变需要9个分量,于是可以把单向应力应变关系推广到三维应力状态,及推广到广义的胡克定律本式应该是91个应变分量单由于切应力互等定理,此时后面的三个应力与式中的切应力想等即现在剩余36个应变分量。
(1)具有一个弹性对称面的线弹性体的应力应变公式如下(2)正交各向异性弹性体的弹塑性体公式如下(3)各向同性弹性体的本构方程各向同性弹性体在弹性状态下,主应力方向与主应变方向重合容易证明。
在主应变空间里,由于应变主轴与应力主轴重合,各向同性弹性体体内任意一点的应力和应变之间满足:,,,,,,,CCCxxyz111213,,,,,,,CCCyxyz212223,,,,,,,CCCzxyz313233 (2-3),,,,,,yyxzxz对的影响与对以及对的影响是相同的,即有,CCC==,CC=CC=,y112233x12132123z;和对的影响相同,即,同理有和CC=3132等,则可统一写为:CCCa==,112233CCCCCCb=====,122113312332 (2-4)所以在主应变空间里,各向同性弹性体独立的弹性常数只有2个。
在任意的坐标系中,同样可以证明弹性体独立的弹性参数只有2个。
广义胡可定律如下式,,xy1,,,,,,,,,,,[()]xy,xxyz,2GE,,,,1,yz, ,,,[()],,,,,,,,yzyyxz2GE,,,1,zx,,,,,[()]zx,,,,,,,zzxy,2GE,,EGv泊松比剪切模量 E:弹性模量/杨氏模量 ,2(1),,,,,E虎克定律 ,G,,对于应变能函数理解有点浅在此就不多做介绍了。
2 屈服条件拉伸与压缩时的应力——应变关系曲线P,,A0,ll0,,lBC:屈服阶段,,CD:强化阶段塑性阶段,,DE:局部变形阶段,弹性变形时应力应变关系的特点1.应力与应变完全成线性关系;即应力主轴与全量应变主轴重合2.弹性变形是可逆的,与应变历史(加载过程)无关,即某瞬时的物体形状、尺寸只与该瞬时的外载有关,而与该瞬时之前各瞬间的载荷情况无关。
我所认识的应力与应变的关系
我所认识的应力与应变的关系机械与动力工程学院我所认识的本构关系可以从三个不同的受力条件下进行分析,第一是在弹性变形下的应力与应变的关系,第二是在屈服条件下的应力与应变的关系,第三是在塑性条件下的应力与应变的关系,而对应力与应变的关系的研究也可以归结为对本构关系的研究。
首先,弹塑性力学分别从静力学和几何学的角度出发,导出了平衡方程的和几何方程,这些方程均与物体的材料性质(物理性质)无关,因而适用于任何连续介质。
但仅仅依靠平衡方程和几何方程来解决实际中的工程问题是不够的。
由于平衡方程仅建立了力学参数(应力分量与外力分量)之间的联系,而几何方程也仅建立了运动学参数(位移分量与应变分量)之间的关系,所以平衡方程与几何方程式两类完全相互独立的方程,他们之间还缺乏必要的联系。
对于所求解的问题来讲,因为您未知量的数目多于任何一类方程的个数,所以无法利用这两类方程求的全部未知量。
平衡方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂222222000t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (1) 几何方程:⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u z w z v y w y v y u x v x u zx z yz y xy x γεγεγε (2) 为了求解具体的力学问题,还必须引进一些关系式,这些关系式即所谓的本构关系。
本构关系反映可变形体材料的固有特此那个,故也称为物理关系,它实际上是一组联系力学参数和运动学参数的方程式,即所谓的本构方程。
本构方程实际上就是一组反映可变形体材料应力和应变之间关系的方程。
在单向应力状态下,理想弹性材料的应力和应变之间的关系极其简单。
我所认识的应力应变关系
我所认识的应力应变关系应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
一 应力-应变关系影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图1-1 应力应变关系图图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
弹塑性力学应力应变关系
我所认识的应力和应变关系在这之前我认识了应力和应变的概念、性质以及从静力学和几何学的角度出发所得到的平衡方程和几何方程。
但是平衡方程仅反映了应力分量和外力分量的关系;几何方程仅建立了位移分量和应变分量的关系。
而谈到应力与应变的关系,对于可变形固体,在弹塑性力学中,在外力的作用下,其将发生变形。
变形分为两个阶段,弹性阶段和塑性阶段。
在弹性阶段,发生的弹性变形可以完全恢复,它是一个可逆过程。
此时,应力与应变的关系是一一对应的,是单值函数关系。
而在塑性阶段,所发生的塑性变形是不可以恢复的,是不可逆过程。
相对应的,塑性阶段的应力应变的关系是非线性关系,不存在一一对应的关系。
我所认识的应力和应变的关系就是本构关系。
本构关系也称为物理关系,它反应的是可变形材料的固有属性,实质上是一组联系力学参数和运动参数的方程式,也就是我们所说的本构方程。
在说应力与应变的关系之前,先说一下本构关系的相关影响因素,包括材料、环境、加载类型、以及加载速度。
即,),,(T t f εσ=。
另外,有各种各样的本构系,比如:弹性本构关系、塑性本构关系、粘弹性本构关系、粘塑性本构关系、各向同性本构关系、各向同性本构关系等等。
简单情况的本构关系:应力和应变的关系包括弹性和塑性的应力应变关系。
我们所说的是线性弹性体的应力应变关系,又分为简单应力状态和复杂应力状态。
在简单拉伸情况下,理想弹性材料的应力和应变的关系很简单,就是材料力学中的胡克定律: 。
而在塑性阶段,应力应变之间不再是简单的胡克定律,而是 。
另外,简单拉伸情况下的卸载定律是 。
在后继弹性阶段,也就是卸载后重新加载的材料会继续发生新的塑性变形,在此时的屈服称为后继屈服,相应的屈服点称为后继屈服点。
初始屈服和后继屈服的不同是:第一,应力的数值不一样,后继屈服的应力值更大;第二,屈服点的个数不一样。
初始屈服点只有一个,而后继屈服点会有好多个,则其对应的应力值也会有很多个。
最后,在卸载全部载荷后进行反向加载比如说把拉伸改成压缩,此时会产生Bauschinger 效应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我所认识的应力应变关系应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
一 应力-应变关系影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图1-1 应力应变关系图图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
因为通常情况下物体不仅仅处于简单应力状态,那么复杂应力状态下应力应变关系又如何呢?如果我们将材料性质理想化即假设材料是连续的、均匀的、各向同性的,忽略T 、t 的影响,忽略净水压力对塑性变形的影响,可以将应力应变关系归结为不同的类型,包括理想线弹性模型、理想刚塑性模型、线性强化刚塑性模型、理想弹塑性模型、线性强化弹塑性模型、幂强化模型、等向强化模型、随动强化模型。
各种材料的应力应变关系图如下图所示:理想线弹性模型 理想刚塑性模型线性强化刚塑性模型 理想弹塑性模型线性强化弹塑性模型 幂强化模型一. 线性弹性体1. 线性弹性体本构方程的一般形式在单向应力状态下,理想弹性材料的应力和应变之间的关系很简单,即x x E σε=,即胡克定律。
如果在三维应力状态下,应力应变之间仍然满足类似的一一对应的关系,则称这类弹性体为线弹性体。
对线弹性体,把单向应力状态下得胡克定律推广到三维应力状态下。
其一般形式为:111213141516x x y z xy yz zx C C C C C C σεεεγγγ=+++++212223242526y x y z xy yz zx C C C C C C σεεεγγγ=+++++313233343536z x y z xy yz zx C C C C C C σεεεγγγ=+++++414243444546xy x y z xy yz zx C C C C C C τεεεγγγ=+++++515253545556yz x y z xy yz zx C C C C C C τεεεγγγ=+++++616263646566zx x y z xy yz zx C C C C C C τεεεγγγ=+++++ (2-1)式(2-1)可简写为ij ijkl kl C σε= (2-2)由于应力量和应变量的对称性,弹性量具有对称性:=ijkl ijlk C C 、=ijkl jikl C C ,从弹性应变能密度函数的概念出发,可以证明上述36个常数中,实际上独立的弹性常数只有21个,即=ijkl klij C C 。
满足广义胡克定律的线弹性体称为各向异性弹性体,各向异性弹性体是线弹性体的最一般情况。
2. 各向同性弹性体的本构方程各向同性弹性体在弹性状态下,主应力方向与主应变方向重合容易证明。
在主应变空间里,由于应变主轴与应力主轴重合,各向同性弹性体体任意一点的应力和应变之间满足:111213x x y z C C C σεεε=++212223y x y z C C C σεεε=++313233z x y z C C C σεεε=++ (2-3)x ε对x σ的影响与y ε对y σ以及z ε对z σ的影响是相同的,即有112233==C C C ;y ε和z ε对x σ的影响相同,即1213=C C ,同理有2123=C C 和3132=C C 等 ,则可统一写为:112233==C C C a =122113312332=====C C C C C C b = (2-4)所以在主应变空间里,各向同性弹性体独立的弹性常数只有2个。
在任意的坐标系中,同样可以证明弹性体独立的弹性参数只有2个。
3. 弹性应变能密度函数弹性体受外力作用后,不可避免地要产生变形,同时外力的势能也要产生变化。
根据热力学的观点,外力所做的功,一部分将转化为弹性体的动能,一部分将转化为能;同时,在物体变形过程中,它的温度也将发生变化,或者从外界吸收热量,或者向外界发散热量。
分析弹性体任一有限部分∑的外力功和能的变化关系,设弹性体取出部分Σ的闭合表面为S ,它所包围的体积为V 。
以δW 表示外力由于微小位移增量在取出部分Σ上所作的功,δU 表示在该微小变形过程中取出部分Σ的能增量,δK 表示动能增量,δQ 表示热量的变化(表示为功的单位),根据热力学第一定律,则有δW =δK +δU -δQ (2-5)假设弹性体的变形过程是绝热的,即假设在变形过程中系统没有热量的得失。
再假设弹性体在外力作用下的变形过程是一个缓慢的过程,在这个过程中,荷载施加得足够慢,弹性体随时处于平衡状态,而且动能变化可以忽略不计(这样的加载过程称为准静态加载过程),则根据上式表示的热力学第一定律,外力在变形过程中所做的功将全部转化为能储存在弹性体部。
这种贮存在弹性体部的能量是因变形而获得的,称之为弹性变形能或弹性应变能。
由于弹性变形是一个没有能量耗散的可逆过程,所以,卸载后,弹性应变能将全部释放出来。
以X ,Y ,Z 表示单位体积的外力,X ,Y ,Z 表示作用在弹性体取出部分Σ表面上单位面积的力。
对上述的准静态加载过程,认为弹性体在外力作用下始终处于平衡状态。
外力所做的功W 包含两个部分:一部分是体力X ,Y ,Z 所做的功1W ;另一部分是面力X ,Y ,Z 所做的功2W ,它们分别为1()i i V VW X u dV Xu Yv Zw dV ==++⎰⎰⎰⎰⎰⎰ (2-6)2()i i S SW X u dS Xu Yv Zw dS ==++⎰⎰⎰⎰乙(2-7) 则:12()()V SW W W Xu Yv Zw dV Xu Yv Zw dS =+=+++++⎰⎰⎰⎰⎰Ò (2-8)外力由于微小位移增量在取出部分Σ上所做的功W δ表示为:12i i i i V S W W W X u dV X u dSδδδδδ=+=+⎰⎰⎰⎰⎰Ò (2-9)将平衡微分方程和静力边界条件代入上式,利用散度定理可得:,()()ij j i ij i j V SW u dV u l dS δσδσδ=-+⎰⎰⎰⎰⎰Ò,,()(),ij j i ij i j ij i j V S Vu dV u dV u dV σδσδσδ=-+=⎰⎰⎰⎰⎰⎰⎰⎰Ò (2-10) 因为,,,1()2ij ij ij i j j i ij i j u u u σδεσδσδ=+=,所以能增量U δ为: ,ij i j ij ij V VU W u dV dV δδσδσδε===⎰⎰⎰⎰⎰⎰ (2-11)定义函数0()ij U ε,使之满足格林公式:0()ij ij ijU εσε∂=∂ (2-12)把它代入(2-11)有: 000ij ij ij ij V V V VU U dV dV U dV U dV δσδεδεδδε∂====∂⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰ (2-13) 0()ij U ε表示单位体积的弹性应变能,称之为弹性应变能密度函数(或弹性应变比能函),简称应变能。
对(2-12)取积分,得0()00000()(0)ij ijU ij ij ij dU d U U εεσεε==-⎰⎰ (2-14) 假如0()ij U ε的具体函数形式能够确定的话,弹性体的应力与应变之间的关系也就完全确定了。
这可表明,弹性应变能密度函数是弹性材料本构关系的另一种表达形式。
假设0()ij U ε对ij ε有二阶以上的连续偏导数,有式(2-12)可得ijkl klijσσεε∂∂=∂∂ (2-15) 式(2-15)为广义格林公式。
将式(2-2)代入广义格林公式得:ijkl klij ijkl kl ijC C σσεε∂∂===∂∂ (2-16) 即各向异性弹性体独立的弹性常数只有21个。
三.屈服条件研究材料的塑性特性时,首先要弄清楚材料什么时候进入塑性变形阶段,即什么时候达到屈服。
固体在载荷作用下,最初处于弹性状态,随着载荷逐步增加至一定程度使固体应力较大的部位出现塑性变形,固体由初始弹性状态进入塑性状态的过程就是初始屈服。
需要找到确定材料初始弹性状态的界限的准则,这个准则就称为初始屈服条件,简称屈服条件。
1.屈服函数与屈服曲面在简单应力状态下,如前面所述的应力应变关系曲线可知,当固体部应力达到初始屈服极限时将产生初始屈服。
在复杂应力状态下,一般屈服条件可以表示为应力分量、应变分量、时间t 和温度T 的函数,它可写成:(,,,)0ij ij f t T σε= (3-1)不考虑时间效应和接近常温的情况下,时间t 和温度T 对塑性状态没什么影响,在初始屈服之前,应力和应变之间具有一一对应关系,所以应变分量ij ε可以用应力分量ij σ表示,因此屈服条件就仅仅是应力分量的函数了,它可表示为:()0ij f σ= (3-2)以应力量的六个分量为坐标轴,就建立起一个六维应力空间,屈服函数()0ij f σ=表示应力空间中的一个曲面,即屈服曲面(简称屈服面)。
当应力点ij σ位于该曲面之时(即()0ij f σ<),材料处于弹性状态;当应力点位于此曲面上时(即()0ij f σ=),材料由初始弹性开始屈服;如果应力进一步增加,材料进入塑性状态。