欠驱动船舶的运动规划和全局指数跟踪控制
欠驱动船舶简捷鲁棒自适应路径跟踪控制_张国庆

4] 论述了欠驱动船舶不能满足 Brock系统。文献[ [5 ] ett 条件 的特性, 其控制器设计不能由任何连续时 不变的控制律实现。 尽管如此, 近年来不少学者在 路径 跟 踪 控 制 方 面 已 取 得 不 少 有 益 的 研 究 结 [610 ] 。文献[ 6]基于自适应 Backstepping 方法提 果 出了一种连续时不变的控制律, 实现了船舶位置指 数渐近稳定的控制结果, 然而该控制率未考虑对船 舶首向角的控制导致船舶在设定路径上打转 ; 文献 [ 7] 通过假设船舶首摇角速率为非零值来满足“连 续激励 ( persistent excitation,PE ) ” 的假设条件, 然 后利用 Lyapunov 直接法设计了 2 种较为完善的连 续时变控制律。 该算法中“首摇角速率为非零 ” 的 假设要求所跟踪的参考轨迹不能为直线 ; 为了解决 8]深入研究欠驱动船舶动态特性 这一问题, 文献[
-
1
问题描述
欠驱动水面船舶运动数学模型
· [16 ]
为
x = ucos ψ - vsin ψ · y = usin ψ + vcos ψ · ψ =r · - 1 u = f u( v ) + m τ u + d wu u - · v = f v( v ) + d wv - · 1 r = f r( v ) + τ r + d wr mr 其中:
0303. 0826. 收稿日期:2013网络出版时间:2014基金项目:国家自然科学基金资助项目( 51109020 ) ; 优博论文培育资 助项目( 2014YB01 ) ; 中央高校基本科研业务费基金资助 项目( 01780134 ; 3132014026 ) . ) ,男,博士研究生; 作者简介:张国庆( 1987) ,男,教授,博士生导师. 张显库( 1968Email: zhangxk@ dlmu. edu. cn. 通信作者:张显库,
基于Takagi-Sugeno模糊神经网络的欠驱动无人艇直线航迹跟踪控制

基于 T a k a g i — S u g e n o模 糊 神 经 网络 的
欠 驱 动 无 人艇 直 线 航 迹 跟踪 控 制 术
董早 鹏 r, 刘 涛 , 万 磊 一 , 李岳 明1 , 2 , 廖 煜雷 , 梁兴威
哈尔滨 1 5 0 0 0 1 ; 1 5 0 0 0 1 ) 哈尔滨 ( 1 . 哈尔滨 工程大学水下机器人技术重点实验室 2 .哈尔滨工程大学船舶工程学 院 摘
( J .N a t i o n a l K e y L a b o r a t o r y o f S c i e n c e a n d T e c h n o l o g y o n A u t o n o m o u s U n d e r w a t e r V e h i c l e , H a r b i n E n g i n e e r i n g U n i v e r s i t y , H a r b i n 1 5 0 0 0 1 ,C h i n a ; 2 .C o l l e g e o f S h i p b u i l d i n g E n g i n e e r i n g , H a r b i n E n g i ee n r i n g U n i v e r s i t y , H a r b i n 1 5 0 0 0 1 , C h i n a )
基于自适应反步法的欠驱动UUV空间路径点跟踪控制
5 2卷
第 4期
( 总第 18期 ) 9
边信 黔 ,等 : 于 自适应 反 步法 的欠 驱动 U V空间路 径 点跟踪 控制 基 U
3 9
律 ,使得结合反步法设计的闭环控制律必须满足保证运动路径渐近趋于期望的路径点的条件。针对海 t
流 的干 扰 ,设 计 自适应 律 以抵 消海流 的干 扰 ,实现 了 I Ⅳ 三维 路径 点跟踪 控制 。 兀
1 U UV 的运动学模型和动力学模型
假 设欠 驱动 II 运动 坐标 系 原点 与重 心重 合, 且 欠驱 动 uuv重力 与浮 力平 衡 的情 况 下,采用 拉 『Ⅳ
格 朗 日方程 ,建 立 UU 的 6自由度运 动 学模型 和动 力学 模 型为 V
磅=t() , l , Mi , vv vv () +J +C() +O() +g = ()
:
rZ
图 2 O 角度 O 和 L S d
2 控制器设计
利 用 反步法 设计 思想 来设计 控制 器 。
5 2卷
第 4 期 ( 第 18期 ) 总 9
边信 黔 , : 于 白适应 反步 法 的欠驱 动 UV空 间路 径点跟 踪控 制 等 基 U
4 1
第 1步 :定义 控制 器误 差 1 为
关 键 词 :欠驱动删 v;路径点跟踪;自适应反步法;L auo 理论 ypnv 中 图 分 类 号 :T 23 P7 文 献标识 码 :A
0 引 言
智 能体 的期 望轨 迹通 常根 据一 个个 的路 径 点来描 述 。近年 来许 多 学者对 路径 点跟 踪进 行 了大量 的
研 究 ,包 括轮 式移 动机器 人 、水面 船舶 和无 人水下 航行 器 ( V) UU 。大部 分 的研 究仅 局 限于单纯 的水 平 面 和垂 直面 的控制研 究 。对于 UU v来 说 ,它 的空间运 动包 括水平 面和 垂直面 6 自由度 ,空 间运动 模 个
欠驱动水面船舶的非线性滑模轨迹跟踪控制
trsis o n e a t ae u f c e s l ,t e e we e n i et r se si e s y d r c in,a d i r e o t l e it fu d r c u t d s r e v se s h r r o s h u tr n t wa ie t c a d h o n n o d rt c n r o o
一
() 4
式中 :
和 分 别 表 示 欠 驱 动 船 舶 的期 望 位 置
c om ;
程 意义 已成 为相 关 学 者关 注 的 热 点 … ; 驱 动水 面 欠
船 舶轨 迹跟 踪 中给定 的参 考轨 迹一 般可 以表 示为 时 间的 函数 , 即在 指 定 时 间 到 达 指 定 位 置 ; 驱 动 欠 船 舶 的轨迹 跟踪 控 制 对 参考 模 型 要 求 很 高 , 控制 器
D l nJ oo gU ie i , a a 1 0 6 C ia ai i t nvr t D l n 1 6 2 , hn ) a a n sy i
Ab t a t Co sd rn he mo e r me rc u c ra n is a d tme v r i g d su b n e n u e v s s r c : n i e g t d lpaa t n et i te n i — ay n itr a c s i d c d by wa e ,wi d, i i n
a n v l n n i e r si i g mo e c nr l lw s d sg e sn l i g mo e t c n q e ,i i w o h l i g o e o l a l n d o t a wa e in d u i g si n d e h i u s n v e f t e si n n d o d d
基于DSC和MLP的欠驱动船舶自适应滑模轨迹跟踪控制

基于DSC和MLP的欠驱动船舶自适应滑模轨迹跟踪控制沈智鹏;王茹【期刊名称】《系统工程与电子技术》【年(卷),期】2018(040)003【摘要】针对存在船舶动态不确定和外界干扰的欠驱动水面船舶轨迹跟踪控制问题,提出一种基于动态面控制(dynamic surface control,DSC)和最小学习参数法(minimal learning parameter,MLP)的自适应滑模控制方法.在控制律的设计过程中,为实现位置跟踪误差的收敛,利用反步法设计船舶前向速度和横漂速度的虚拟控制律镇定轨迹跟踪误差;引入DSC技术,用于消除反步法对虚拟控制求导引起的"微分爆炸"问题;另外,采用 M LP技术,以单参数在线学习代替所有权值在线学习,减少控制器的计算量,避免出现"维数灾难"问题,并结合带有"σ-修正"的自适应律,防止参数漂移,易于工程的实现.稳定性分析证明了所设计控制律可以保证轨迹跟踪船舶闭环系统中轨迹跟踪误差信号一致最终有界,仿真结果验证了所设计控制器的有效性.%For the trajectory tracking control problem of underactuated ships with parameter uncertainties and external disturbances,an adaptive sliding mode control strategy based on dynamic surface control(DSC) and minimal learning parameter(MLP)is proposed.In order to achieve convergence of position tracking error, the backstepping method is employed to design a virtual control law for surge and sway velocities of ships to sta-bilize position errors in the controller design.The DSC control technique is introduced to eliminate the"differen-tial explosion"problem of derivation term of virtual control vector of the backstepping method.TheMLP tech-nique is employed to reduce the computation burden of controller and avoid the"the curse of dimensionality"problem,which substitutes single parameter online learning for all weights online learning.An adaptive law in-corporated with σ-modification is proposed to prevent parameters from drifting.By the stability analysis,it is proved that the proposed control law can guarantee the uniformly ultimate boundedness of trajectory tracking er-rors in the closed-loop trajectory tracking system of ship.Simulation results validate the effectiveness and the performance of the proposed scheme.【总页数】9页(P643-651)【作者】沈智鹏;王茹【作者单位】大连海事大学信息科学技术学院,辽宁大连116026;大连海事大学信息科学技术学院,辽宁大连116026【正文语种】中文【中图分类】TP273【相关文献】1.欠驱动水面船舶的非线性滑模轨迹跟踪控制 [J], 孟威;郭晨;孙富春;刘杨2.基于扩张观测器的欠驱动船舶轨迹跟踪低频学习自适应动态面输出反馈控制 [J], SHEN Zhi-peng;ZOU Tian-yu;WANG Ru3.基于海流观测的欠驱动AUV自适应反演滑模轨迹跟踪 [J], 刘丽萍; 王红燕4.非完全对称欠驱动无人艇的自适应滑模轨迹跟踪控制 [J], 钟雨轩;翁磊;梁旭5.非完全对称欠驱动无人艇的自适应滑模轨迹跟踪控制 [J], 钟雨轩;翁磊;梁旭因版权原因,仅展示原文概要,查看原文内容请购买。
欠驱动船舶的光滑时变全局渐近镇定
的方法简单并且能保证全局渐近收敛。
1 船舶模型
由文 献【 1 — 3 】 可 以得 出简化 的常规船舶 动力 学非
线性方程 :
吐 :
・
M + 上
m l l m l t 。
控 制可 以使 该类 系统 渐 近镇 定 。文献 [ 8 】 基于 过
程, 提 出 了不连 续全局镇 定控制 律 , 在初始 条件满足 假 设 的前 提 下 , 使 得 闭环 系统 状 态指 数 收敛 到平衡 点。文献【 9 . 1 1 ] 从几何学 角度 分析了欠驱动 系统 的可 控性并 且基于李群 提出了控 制律 。J . B a p t i s t e  ̄ 针对一 类 特殊结 构 的欠 驱动 系统 , 设计 了时变 镇定控 制律 。 由于船 舶欠驱动系统包含不 可积动态 , 因而它们不 可 能转化成无 漂移 的形式 , 即文献[ 1 2 1 中的方法很 多欠
动泊位控制 过程 中, 需 要同时控制 水平面运 动的 3 个 自由度 , 故在 该实 际应 用情况 下 , 系统归结 为欠 驱动
驱 动 系统都 不 能直 接应 用 。C . S a ms o n t ” 指 出通过恰
当的状态变换 , 可 以将 欠驱动系统转化 为具有 特殊结 构的系统 , 从而方便设 计反馈 控制律 。J . G h o m ma m等
、 厂 0 1 . 2 8 No . 5
D O I : 1 0 . 7 6 8 2  ̄ . i s s n . 1 6 7 3 - 1 5 2 2 . 2 0 1 3 . 0 5 . 0 0 2
欠驱动船舶 的光滑 时变全局渐近镇定
程春华 , 胡云安 , 吴进华 , 黄 诘
( 海军航空工程 学院控制工程系 , 山东 烟台2 6 4 0 0 1 )
基于切换视线法的欠驱动无人艇鲁棒自适应路径跟踪控制
基于切换视线法的欠驱动无人艇鲁棒自适应路径跟踪控制曾江峰;万磊;李岳明;张英浩;张子洋;陈国防【摘要】针对欠驱动无人艇(USV)的航路点路径跟踪问题,提出了一种鲁棒自适应控制方法.设计了一个新的切换型视线(LOS)法制导律,以引导USV始终以最佳LOS 圆半径趋向期望路径.与传统制导律相比,切换型LOS法制导律具有运算负载小、收敛速度快的特点.考虑到USV模型的不确定性及环境干扰未知时变性,开发了一种复合神经网络控制器来增强系统鲁棒性.通过在网络输入中增加预测误差信息,以提高网络逼近精度.同时,引入最小学习参数思想优化网络结构,对神经网络的在线自适应参数进行压缩,以减轻网络计算负担,并借助李雅普诺夫理论对系统的稳定性进行了分析.通过对比仿真实验验证了所提出控制策略的有效性.【期刊名称】《兵工学报》【年(卷),期】2018(039)012【总页数】11页(P2427-2437)【关键词】欠驱动无人艇;路径跟踪;自适应控制;神经网络【作者】曾江峰;万磊;李岳明;张英浩;张子洋;陈国防【作者单位】哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水下机器人技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TP273+.210 引言随着海洋资源开发和海洋防卫技术的快速发展,无人艇(USV)作为一种重要的海洋装备受到了广泛重视,其在海洋环境监测、海底测绘、军事侦察等活动中扮演着越来越重要的角色[1-2] 。
漂角修正的欠驱动船舶航向鲁棒自适应控制
漂角修正的欠驱动船舶航向鲁棒自适应控制
随着船舶的快速发展,航行安全问题也越来越受到船舶相关领域的关注。
在船舶航行控制中,航向是决定船舶安全的关键因素之一。
然而,由于海上环境复杂多变,船舶往往会受到风浪、潮汐等外部干扰因素的影响,导致船舶航向控制困难,需要寻找一种鲁棒自适应控制方法来提高船舶的航向控制精度和稳定性。
漂角修正的欠驱动船舶航向鲁棒自适应控制是一种新兴的控制方法,通过对船舶的漂角进行修正,实现欠驱动船舶航向鲁棒自适应控制。
具体控制方法是利用风速传感器和电子罗盘等设备监测环境因素,通过船舶动力学建模、PID控制和自适应控制等算法优化船舶的强制航向和漂角,从而实现船舶的航向稳定。
1.船舶动力学模型的建立。
船舶动力学模型是控制系统的基础,需要准确地描述船舶的运动特性,并包含重要参数,如船舶质量、惯性矩阵、船速、舵角等,并结合电气控制系统进行建模。
2.风速传感器和电子罗盘等设备的选取。
准确的环境监测设备可以提供船舶位置、方向、速度等数据,便于控制系统进行更准确的控制计算。
3.PID控制器的设计。
PID控制器是一种经典的控制算法,可以实现快速响应和准确跟踪目标,需要根据船舶动力学模型进行参数调整。
4.自适应控制算法的设计。
自适应控制算法可以根据环境因素和船舶动力学模型对PID控制器进行自适应调整,使得控制系统更加稳定与精确。
总之,漂角修正的欠驱动船舶航向鲁棒自适应控制是一种有效的船舶控制方法,在海上环境复杂多变的情况下,可以提高船舶的航向控制精度和稳定性,提高船舶的安全性和经济性。
同时,还需要不断研究和发展新的先进技术,为航海行业提供更多的技术支持和方案。
一种欠驱动船舶直线路径跟踪的预测控制器设计方法
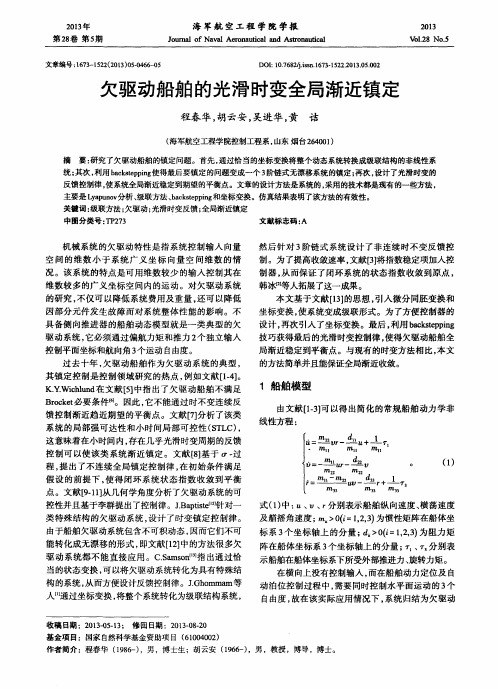
0 .5
] d 0 a r [ e -0 .5 ψ
-1 0 50 100 15 0 200 250 3 00
] d 0 .5 a r [ e w0
-0 .5 0 50 100 15 0 200 250 3 00
1
Time [s]
(L
+ L
ρ f
g1
L
ρ f
1
h
)
+
1
∑ (k
i=1
ρ
i
1
+ p L
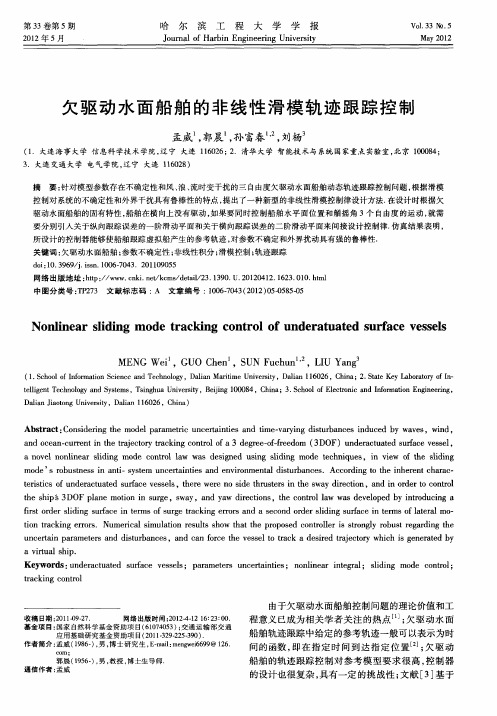
控制目标是:设计控制器 τ r 使得欠驱动船舶在外界干扰
(2 )
作如下假设:
m1 1 < m2 2
(3 )
并引入重定义输出: (1 )
we =ψ e + arcsin ky 1 + ( ky) 2
(m m2 2 ) r = 11 uv m3 3 z1 = y z2 =ψ
(4 )
则控制系统 (1 ) 转化为如下等价的单输入单输出控制系 统:
y = u sin ψ + v cosψ ψ= r v= m11 ur m22 d 22 v m 22 d 33 1 1 τ+ τ (t ) r+ m33 m3 3 r m33 w r
ψ e
图 1 船舶直线路径跟踪控制系统示意图
τ wr ( t ) 的影响下能够跟踪给定的直线参考路径。
定义
ψe = ψ+ φ= ψ + arctan v u
y = ut s in we 1+ (ky )
2
utky 1 + ( ky ) +
2
其中: y 表示船舶的横向位移;u, v 分别为船舶前进与横
UUV的全局路径跟踪控制
x¢p
(
s)
=
dxp ds
,
y¢p
(
s)
=
dy p ds
,
x¢p¢
(
s)
=
d2 xp ds 2
,
y¢p¢
(
s)
=
d2 yp ds 2
于是, 参考点P ( xp , yp ,0) 沿曲线运动的速度可以
表示为
U p = x¢p2 (s) + y¢p2 ( s)s&
(3)
特 别 的 , 当 s 为 弧 长 参 数 时 , x¢p2 (s) + y¢p2 ( s) = 1 ,
Abstract:The horizontal nonlinear path following control problem is studied. The Serret-Frenet coordinate originating at the free reference point on the path is used to describe the path following errors and their dynamic model, solving the singularity problem in the classic method. The yaw angle is treated as the control input of path following errors, and the stabilization function is designed. The path following errors is proved to be globally asymptotically stable with properly choosing the rate of the path curve parameter. The simulation studies with the linear and circular reference pathes demonstrate the effectiveness of the proposed path following controller. Key Words:Unmanned Underwater Vehicle, Global Path Following, Serret-Frenet Coordinates, Underactuated
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欠驱动船舶的运动规划和全局指数跟踪控制王岩;朱齐丹;刘志林;杨震【摘要】In order to realize tracking arbitrary specified trajectory, a motion planning method is presented. All the desired attitudes are obtained by combining cubic spline interpolation, ship dynamic model, and discrete expected dots. Meanwhile, in order to realize fast tracking trajectory of underactuated surface vessels, global exponential tracking control law is proposed. Trajectory tracking error dynamic equation consists of two cascade subsystems based on diffeomorphism transformation. Then global exponential tracking control law is designed by using backstepping for error subsystems. The results of simulation experiments indicate that the proposed controller can effectively track arbitrary specified curve trajectory.%针对目前欠驱动船舶航迹跟踪控制难以实现跟踪任意可行航迹问题,提出一种运动规划方法.利用多项式拟合,并结合船舶动力学模型,通过离散期望点规划出操作性可实现的全部期望姿态.同时,为实现欠驱动船舶的航迹快速跟踪控制,提出一种全局指数航迹跟踪控制律.引入微分同胚变换,建立两个级联的子系统构成的航迹跟踪误差动态方程;基于反步法的设计原理,运用Lyapunov直接方法对变换后的误差系统设计了全局指数航迹跟踪控制律.仿真结果验证了所提出的全局指数航迹跟踪控制律能够有效实现跟踪任意可行航迹.【期刊名称】《计算机工程与应用》【年(卷),期】2013(049)005【总页数】6页(P18-22,69)【关键词】欠驱动船舶;运动规划;跟踪控制;反步;指数稳定【作者】王岩;朱齐丹;刘志林;杨震【作者单位】哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001【正文语种】中文【中图分类】U664近年来,欠驱动系统的运动控制问题一直是倍受关注的研究热点。
欠驱动水面船舶(Underactuated Surface Vessels,USV)由于横向上未装备驱动装置,缺少可用的控制输入,因此针对一般运动系统的基于向量的控制器设计方法不能有效地用以解决USV的运动控制问题[1-2]。
欠驱动船舶执行跟踪敌对目标、巡逻勘察、近远程避障等作战任务时,均需要以一定的速度沿着指定的目标航迹航行。
因此航迹跟踪控制系统是USV使命中重要的组成部分。
在航迹跟踪控制器设计过程中,期望连续可导的目标信号,然而在实际中这种连续可导的目标航迹是难以指定的,甚至是不可实现的,比如在避障控制中目标航迹是复杂多变的,如此连续多变的目标航迹几乎是难以设计的。
即使在执行简单的航迹跟踪任务中,连续的目标航迹可以给出,此时设计出来的航迹跟踪控制器也无法具有普遍意义,难以推广到操纵性、实时性和路况复杂多变的环境中。
因此设计离散目标点指导下的航迹跟踪控制方法就成为实现USV航迹跟踪控制的迫切需要,并可广泛应用到多种操纵控制任务中。
而运动规划算法可以将离散的目标位置点转为期望的连续航迹信号和符合安全运动约束的期望姿态信息,可兼顾实用性和控制器设计方便的双重需要。
目前对于USV的航迹跟踪的研究,主要存在两条不同的研究路线:一种是基于虚拟指导船舶的航迹跟踪控制方法[3-8],另外一种是基于运动学和动力学回路的跟踪控制方法。
所谓的虚拟船舶是指控制器设计中存在一个虚拟运动的船舶,该船舶的附加质量和水动力系数与实际受控船舶一致,在期望的纵向推力和转向力矩驱动下由虚拟指导船舶实时产生实际受控船舶的操纵运动可物理实现的期望航迹和期望运动姿态。
虚拟船舶方法存在的主要问题是:由于难以预知复杂的期望航迹的参考控制输入,导致所设计的航迹跟踪控制器难以跟踪任意指定航迹,即使是操纵运动可实现的。
因此,文献[3-8]在仿真或实验都是跟踪一条指定的圆或圆弧航迹。
但优势为不仅可以跟踪指定的位置变量,还可以同时实现对艏摇角、艏摇角速度、纵向速度、侧向速度的姿态跟踪。
基于运动学和动力学回路的跟踪控制方法仅仅能够实现USV的期望位置跟踪,不能实现其他姿态的跟踪[9-10]。
而且也未能解决关于在未知复杂的环境下如何得到符合安全运动约束和动力学条件约束的连续期望航迹问题。
从工程角度出发,为实现欠驱动船舶的航迹跟踪控制器应用于实际问题,本文主要由以下几部分组成:首先,为解决欠驱动船舶不能跟踪任意指定航迹问题,运用运动规划方法,利用离散目标点规划出符合动力学约束的连续期望轨迹;其次,引入微分同胚变换,建立两个级联子系统构成的航迹跟踪误差动态方程,并运用反步法对变换后的误差子系统设计了全局指数状态反馈控制律。
最后利用本文提出的基于规划期望轨迹的全局指数航迹跟踪控器进行了仿真实验,结果表明所提出的方法能有效地实现USV航迹的精确跟踪。
考虑如下欠驱动水面船舶模型[11]:这里D=diag[d11,d22,d33]。
其中,x,y表示大地坐标系中船舶的位置,ψ为船舶的航向角,u,v,r分别表示船体坐标系中船舶的纵向速度、侧移速度及艏摇角速度,τu和τr分别为纵向推进力和转向力矩。
C(ν)为科里奥利和向心力矩阵,M为惯性参数矩阵,D为阻尼参数矩阵。
由于无侧向推进装置,在横向上没有可用的控制输入,因此所研究的船舶航迹跟踪问题为欠驱动控制问题。
运动规划算法以离散的目标位置点为基本信息,通过样条函数对目标位置点进行分段拟合,不仅输出分段连续的期望航迹,同时输出具有安全运动约束的目标姿态,形成航迹跟踪控制器有效的期望输入,从而实现姿态约束及安全运动约束条件下的USV航迹跟踪控制,既能充分发挥USV优良的操纵性能,又能实现良好的跟踪控制性能。
基于运动规划的USV航迹跟踪控制分为4个步骤:(1)设定被跟踪的离散目标点(xk,yk),利用三次样条函数拟合获得分段连续化参考航迹(2)根据连续化航迹信息,估计USV的姿态信息(-u,-v,-ψ,-r)。
(3)利用动力学特性获得期望的控制输入(τ1d,τ3d),由此确定被跟踪的期望姿态(xd,yd,ψd,ud,vd,rd)。
(4)设计航迹跟踪控制器,跟踪期望姿态(xd,yd,ψd,ud,vd,rd)。
3.1 参考航迹的多项式拟合假设离散目标点 (xk-1,yk-1)、(xk,yk)和 (xk,yk)、(xk+1,yk+1)分别存在曲线Sk-1(θ)和Sk(θ),其中θ为参考期望轨迹参数。
定义向量θVEC为:每两个离散目标点之间存在一条拟合曲线,以Sk-1(θ)为例,其三次样条曲线可以表达为:参考轨迹参数θ相对于时间变量t的偏导数为,函数为待定项。
和相对于参数θ的偏导数为:因此,根据式(1),大地坐标系下的船速Ud() t为:若船舶航速的动态特性可以表征为:式(5)和(6)联立,可知θ(t)和Ud(t)的动态变化过程为:其中,Uref为参考速度,Ts为速度动态时间常数。
下面需要根据连续性条件确定目标航迹的轨迹参数[a3 a2 a1 a0]T和[b3 b2 b1 b0]T。
易知,若存在N+1个点,则存在N个曲线S,也即存在4N个参数对(a,b)。
因此,需要建立4N个约束方程,以确定拟合参数。
这里,以某连续的三个离散点为例,存在连续曲线Sk-1(θ)和Sk(θ),应满足连续性条件为:若Sk-1(θ)和Sk(θ)对轨迹参数变量θ的一阶和二阶导数满足连续条件:因为连续性及可导性条件是对于单点阐述的,因此除首尾两个点外,可以建立4(N-1)个方程。
同时,首尾点位于首尾曲线S1(θ)和SN(θ)上并满足可导性条件,这样一共可建立4N个约束方程,由此可确定式(3)中的4N个轨迹参数。
根据式(3)和(7),能够求解得出参考航迹和,同时可以得到,,,。
为了避免符号表达繁琐,下面出现的变量将省略自变量时间t。
3.2 参考姿态的估计为方便叙述,将设定的离散目标点、三次样条曲线拟合后的分段连续航迹、估算的船舶参考状态和规划的期望输入(τ1d,τ3d)在后文中分别定义为参考航迹、参考姿态和期望输入。
考虑USV已跟踪上目标轨迹,根据式(1)可知:其中,为USV的航迹向,如图1所示。
二者的导数可表示为:USV在运动过程中产生侧向速度,直接导致USV的真航向与航迹向角度不一致,如图1所示。
由侧向速度引发二者间的夹角称为漂角,可计算得:正常情况下,认为USV的纵向速度始终大于0,那么,式(14)中漂角的符号由侧移速度来决定,直接影响正负符号的条件为期望轨迹的弯曲方向。
例如:当轨迹为逆时针方向时,侧移速度为负值;当轨迹为顺时针方向时,侧移速度为正值。
根据式(10),侧移速度可计算得:式(15)的微分结果为:同时,根据式(15)可知:根据式(14),结合式(10)、(13)和(15)可以计算得出当轨迹不为直线时,角速度的计算公式为:当参考轨迹为顺时针方向时>0,>0<0,将式(15)、(18)和(1)代入式(16)可得关于纵向速度的微分方程为:同理,当参考轨迹为逆时针方向时,纵向速度的微分方程为:至此,可以总结船舶参考状态的估算过程:首先,根据已知参考航迹和,通过式(19)和(20)能够计算得出USV纵向速度,之后根据式(15)计算得到侧移速度,最后根据式(14)和(18)计算得到航向角和航向角速度。
3.3 期望控制输入的规划前面两节已经给出USV运动可行的连续参考轨迹、航向角和船体坐标系下的所有速度和加速度,下面将利用USV的动力学模型(1)直接计算得出相应开环期望控制输入:将式(21)和(22)中的期望控制输入(τud,τrd)代入整个运动方程(1),可求得USV的操作性可实现的期望航迹(xd,yd,ψd,ud,vd,rd)。
运动规划算法和开环控制律(21)、(22)可以看作是设计闭环轨迹跟踪控制律的一部分。