面向高密度地震动观测的ARM信号采集系统
基于ARM+FPGA的实用高精度数据采集器设计

基于ARM+FPGA的实用高精度数据采集器设计本文主要介绍基于ARM+FPGA的高精度数据采集器设计,该设计的特点是利用FPGA控制数据的高速采集,同时采用ARM对外围电路进行控制和数据处理,并实现在液晶屏上的频谱显示。
该设计利用FPGA实现高精度数据采集控制,利用ARM实现光标跟踪、D/A变换及显示等重要指标,并且提供了良好的人机交互界面,其设计方法具有较高的实际应用价值。
文章重点论述了基于ARM+FPGA的实用高精度数据采集器的总体设计、硬件设计和软件设计。
标签:ARM;FPGA;高精度;数据采集;系统引言在科技快速发展的今天,数据采集的重要性是十分显著的,其应用范围越来越广泛,尤其是在工业领域,数据采集的精度和处理的实时性要求逐渐提高,传统的数据采集系统通常采用A/D芯片和主控芯片搭配的手段,该方法功能单一,处理效率低下,如果遇到被测的对象比较复杂并且数据量比较大时,无法满足对数据高精度的要求。
基于ARM+FPGA的高精度数据采集系统能够有效的避免上述问题,ARM作为主控芯片,对整个系统进行控制,并将数据通过USB高速的上传到上位机中,能够借助上位机的强大的运算能力,对数据处理的实时性进行确保,同时能够简便的形成一个用户自定义的数据采集系统,具有良好的通用性;而FPGA能够对数据采样的高精度和高效率进行保证。
本文主要论述基于ARM+FPGA的高精度数据采集器设计相关内容。
1系统总体设计及基本工作原理1.1系统组成高精度数据采集器主要架构由ARM(+DA)+FPGA(+AD)组成。
本系统主要由三个独立的模块组成。
第一部分是数据采集模块,主要完成信号的采集、调理和A/D转换,然后采用并行方式送给处理器;第二部分是处理器模块,接收数据采集模块发送过来的数字信号、处理后显示,并且将处理完的信号送给D/A转换模块;第三部分是D/A转换模块,把数字频谱信号还原并通过示波器显示。
1.2 系统基本工作原理系统工作时,数据采集器置于被监控的设备处,通过传感器对设备的电压或者电流信号进行采样、保持,并送入A/D转换器变成数字信号,然后将该信号送到FPGA内的FIFO中。
基于AD7663和单片机及ARM的动应力测量系统(1)
基于AD7663和单片机及ARM的动应力测量系统章阳摘要:本文介绍了一种基于高速、高精度AD转换器AD7663和单片机W78E58B-40及ARM设计的动应力测量系统。
在介绍了系统的整体硬件组成的基础之上,描述了系统各模块的构成、模块主要芯片的性能及工作原理,给出了模块及器件之间接口的设计思路和架构,最后介绍了系统软件框架。
该测量系统成本低、精度高、便于使用、具有一定的使用价值。
关键词: AD7663 W78E58B-40 ARM随着我国铁路的大面积提速,机车车辆的使用寿命受到高度的关注与重视。
机车车辆的使用寿命主要取决于其关键部位的疲劳寿命,动应力是反映结构疲劳特性的关键指标。
机车车辆机械结构的动应力值是机车车辆运行过程中在各种激励作用下的综合体现,单纯用理论计算的方法很难全面模拟,为考核机车车辆车体和转向架构架等关键部件的强度特性,通过动应力试验测试机车车辆运行过程中的动应力值是一个行之有效的方法。
动应力测试需要快速、可靠并方便使用的动应力测量系统,本文介绍的这种基于16位高速模数转换器AD7663和W78E58B-40单片机及ARM的测量系统,正是这样一个可独立工作,也可与计算机联机使用的动应力测试系统。
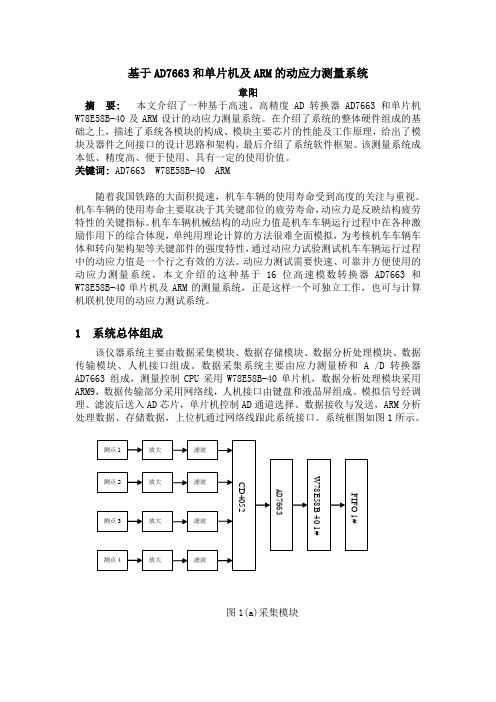
1 系统总体组成该仪器系统主要由数据采集模块、数据存储模块、数据分析处理模块、数据传输模块、人机接口组成。
数据采集系统主要由应力测量桥和 A /D 转换器AD7663 组成,测量控制CPU采用W78E58B-40单片机,数据分析处理模块采用ARM9,数据传输部分采用网络线,人机接口由键盘和液晶屏组成。
模拟信号经调理、滤波后送入AD芯片,单片机控制AD通道选择、数据接收与发送,ARM分析处理数据、存储数据,上位机通过网络线跟此系统接口。
系统框图如图1所示。
图1(b)处理模块1.1数据采集转换模块数据采集转换模块由调理电路和AD芯片构成。
外围调理电路完成信号的放大和滤波,然后送入A/D转换器AD7663进行AD转换。
单道地震数据采集系统软件设计与实现

单道地震数据采集系统软件设计与实现摘要:单通道地震数据采集系统软件是专为海洋工程勘察高分辨率浅层地层剖面系统开发的采集系统软件。
系统软件基于 QT4开发,可运行于 windows和lmux系统平台。
单通道地震数据采集系统软件可以实时接收采集的地震数据,实时显示,并实时存储。
关键词:单轨地震数据采集;高分辨率概述海上高分辨率地震勘测设备可以应用井场调查来探测浅层地质构造和浅层天然气分布,并为钻井平台布置提供风险评估。
避免发生诸如钻孔和井喷等事故,为安全钻井提供基础,也可以应用于浅层高分辨率地震作业。
此外,提供高分辨率地震数据,实现更清晰的地下地质构造成像,并应用于中国海洋地质调查领域。
它用于确定沿海内陆,大陆和深海盆地的海底地形和地形。
随着国内近海油气田开发市场的积极发展,井场调查的工作量越来越大,对高分辨率,高精度工程测量地震设备的需求也在不断增加。
也正因如此,开发具有自主知识产权和高分辨率工程的地震设备势在必行。
水下数据采集电路实现浅地面反射信号的采集和传输,前端与高频探测器单通道组合的水下工作部分相连。
收集的数据通过跳线部分通过RS485通信协议上传到海事数据命令转换电路。
海事数据命令转换电路完成主控系统的转发功能和水下采集数据,完成火花源系统的触发,实现采集系统与源系统的同步。
主控制系统控制软件通过TCP / IP协议接收和发送数据,海事数据命令转换板通过RS485通信协议接收和发送数据。
串口服务器完成主控制系统控制软件和海事数据命令转换电路之间通信格式的转换。
1单通道地震采集系统的工作原理和过程单通道地震采集系统主要由工作站、信号源、接收电缆和导航定位系统组成。
源头主要包括电火花和气枪,其中气枪源包括枪控制单元,空气压缩机和气枪;接收电缆主要使用一个48单元的水听器。
传统的采集系统采用一次性模式,即一个激发源和一个接收水听器。
检测深度大,记录范围一般在1秒以上,但地层的检测分辨率低,形成分辨率为5-6米。
ARAM—24遥测地震数据采集系统的数传及重采样技术分析

,
B
”
;
反
物
裸
,
装
备 测 试 信号数 据
12 8 kb
s
, 。
1
7
年
之
,
当两 个 V 码之 间 的信息 码
。
“
" 的数 目为 奇 数 时 1
从 存储 器 中 读 出 数 据 ( 读 出速 率 为
D
就 不 用 再 添 加 补信码
5
.
/ ) 再经
。
/ A 转 换器输 出 高精度 的模拟 正 弦
在接 收端 译码 时 由两 个 相邻 同极 性 码找 出 即 同 极 性 码 中后 面 那 个 码 就 是 V 码
或采 集 站与交 叉站
或 交 叉站 与交 叉 站 之间 只 有 一对 双绞 或 同轴
。
传输 及 其 编码 技 术
H DB 3
数传 线
因此
,
A R AM一2 4
的大 线 可 替 代 交叉 线
,
,
编码 方式 系统 的数 传采用
。
这 就 增 加 了野 外 施 工 的 灵 活 性
这 一特性 是 当今其
。
A R A M一 2 4
物 探装 备
,
9 1
, 7 7 (4 )
,
:
3 1
本 文对 A R A M一2 4
遥 测 地 震 数 据 采 集 系 统 有 关 采 集 数 据 命 令 状 态 数 据 的传 输 方 式 及 系 统
,
、
、
数 据 传 输 的 编 码 方 式 进 行 了分 析 并 详 尽 地 阐 述 了地 震 数 据 的 重 采 样 技 术 及 实 现 这 一 功 能 的 具 体 方法
数据采集系统在地震模拟振动台试验中的应用

韦 彪 ,钟静
( 1 .河海大学水利水电学院 ,江苏 南京 2 1 0 0 9 8 ;2 .南京航 空航 天大学 民航 学院, 江苏南京 2 1 1 1 0 0 )
摘要 : 在数据采集系统 的电路原理基础上 , 将其应用于地震模拟振动 台试验 中, 并根 据需要制 作了传感器 的转接元件 , 验证了 其可靠性 。 对不 同结构 的剪切墙进 行了模态试验 , 在试 验方法上采用数字迭代反馈技术 , 精确再现 了地震波 , 通 过试 验对结构 自振频率 、 水平 和垂 直加速度反应等进行 了研 究。 对采集的数据进 行了处理和分析 , 经过对 比证明剪切墙加 固方法设计的合理
0 引言
需要 数 十 通道 , 多 至 百通 道 以上 。 为 此 必须 配 置 相应 的多 通 道 的动
整个 动 态 数 据采 集 系 统 包 括 各种 传 感 器 、 与传 感 地震是重大 自然灾害之一, 给人类带来的损失是 巨大 的, 抗震 态 数 据 采 集 系 统 。 数据采集模块及计算机 。[ 1 ] 研 究是为 了抗御地震把损失减d , N最低 限度而发展起来 的一 门学 器相适配的信号调理器模块、
性。
关键词 : 采集仪 ; 应变调理器 ; 传感器
Ap pl i c a t i o n of Da t a Ac q u i s i t i o n S y s t e m i n Sh a k i ng Ta bl e Te s t s
f o r t he Se i s mi c Si mu l a t i o n
Ab s t r a c t:A n a p pl i c a t i o n o f D a t a a c q ui s i t i o n s y s t e m i n s h a k i n g t a bl e t e s t s f o r t h e s e i s m i c s i m u l a t i o n w e r e r e s e a r c h i n t h e p a p e r b a s e d o n c i r c u i t o u s p h i l o s o p h y .S wi t c h i n g e l e m e n t s o f s e n s o r s w e r e m a d e a n d w o r k e d n o r m a l l y .M o d a l t e s t i n g w e r e p r e s e n t e d o n s h e a r w al l s w i t h k i n d s o f s t r u c t u r e .T h e d i g i t a l c o m p e n s a t i o n f e e d b a c k m e t h o d w a s u s e d f o r r e p r o d u c i n g e a r t h q u a k e w a v e s ,t h e n a t u r a l v i b r a t i o n f r e q u e n c y ,t h e h o r i z o n t a l a n d v e r t i c a l a c c e 1 e r a t i o n r e s p o n s e w e r e s t u d i e d .B y d a t a a n a l y z i n g a n d p r o c e s s i n g a n d c a m p a r i s i n g t h e t e s t r e s u l t s ,t h e s t r e n g t h e n i n g m e t h o d o n s h e a r w a l 1 s w e r e p r o v e d c o r r e c t . Ke y wo r ds : D a t a a c q u i s i t i o n d e vi c e: s t r a i n c o n d i t i o n e r: s e n s o r
基于ARM的电液伺服地震模拟器

A RM 控 制 器 接 收 工 控 机 通 过 C AN总 线 发 送 的 命 令 ,控 制 电液伺 服 系统工 作 .并将 系统 的状 态 通过 C N A 总 线 发 送 至工 控 机 ,实 现 系统 状 态 的 实 时 监 测 。AR M
控 制 器 采 用 L C 2 4作 为 C U。 L C 2 4是 一 款 基 于 P 29 P P 29
件流 程 如 图 3所示 。
其 中 :m厂 上 平 台总 质量 ; 一 摩擦 系 数 ;a 水平 一 振动 最大 加速 度 。依 据 系统 运动 参数 及 所需 液 压驱 动力 进 行 液压 系统 选 型计算 及性 能估 算 。
2 AR 的 控 制 器 设 计 M
控制 系统 包 括 工 控机 和 A RM 控制 器 两 个 部 分 .通
动 ,从 而 达 到 模 拟 地 震 效 果 的 方 法 。
关 键 词 :地 震 模 拟 器 ;伺 服 ;A RM 控 制 器
中 图分类 号 :T 4 B7
文献标 识 码 :A d i O3 6 /. s.0 2 6 7 .0 20 .1 o: .9 9j sn10 — 6 32 1 .1 2 l i 0
过 C AN总 线进 行 通 信 ,实 现 远 程 控制 。控 制 系 统 功 能
框 图 如 图 2所 示 。
雷
工控机
一
一r r 迥]l ~ 每 一 {
— l _ L A R M 。 。 一
… 一
P t 誊一i 一 C L 一 8 荨 事 4 1
一
摆动。
加 强 人 类 对 地 震 的 了 解 和认 识 是 提 高 人 类 应 对 地 震 灾 害 ,减 少 伤 害 的必要 手 段 。地震 模 拟器 就 是 为 了便 于人 类 了解 地震 ,通 过 基 于 A M 的 电液 伺 服 控制 系统 的 方 R 法 ,研 制 的一种 全 新设 备 。
基于ARM的无人值守地震台站蓄电池监测系统的设计与实现
基于ARM的无人值守地震台站蓄电池监测系统的设计与实现刘彦磊;梁红杰;吉红;黄占平【摘要】The design and implementation of battery remote onlinereal⁃time monitoring system for seismic stations is intro⁃duced,which takes ARM chip as microprocessor,and uses a dedicated battery monitoring smart chip DS2438 and intelligent battery sensor LEM Sentinel and current sensor acquisition system for the battery temperature,voltage,current and remaining power. It greatly simplifies the hardware circuit design. The system uses a modular design structure to make the system more reliable, simple and practical. The communication system uses 4G(LTE)wireless communication technology to achieve remote communi⁃cation with the provincial bureau precursor and monitoring center,and achieve the unmanned seismic station s’online real⁃time remote monitoring of the battery.%介绍一种以ARM芯片为微处理器的地震台站蓄电池远距离在线实时监测系统的设计与实现,同时采用专门用于监测电池的智能型专用芯片DS2438和LEM的智能蓄电池传感器Sentinel、电流传感器两套采集系统,对电池的温度、电压、电流和剩余电量等参数的采集,大大简化了硬件电路的设计。
基于ARM7与CS5376的三分量采集系统设计
基于ARM7与CS5376的三分量采集系统设计
董健;马国庆;李守才
【期刊名称】《测控技术》
【年(卷),期】2016(035)001
【摘要】针对数字化地震采集需求,阐述了由ARM7作为微处理器控制CS5376芯片组进行三分量地震数据采集的全过程.通过嵌入式软硬件开发实现A/D参数配置、数据转换、数据传输等功能.利用数字示波器获取测试数据流验证设计合理性.整体设计应用到实际产品中验证其在地震采集设备研发中的可行性和实用性.本设计可适用于多个地球物理勘探领域.
【总页数】4页(P53-55,64)
【作者】董健;马国庆;李守才
【作者单位】中国石化石油物探技术研究院,江苏南京210014;中国石化石油物探技术研究院,江苏南京210014;中国石化石油物探技术研究院,江苏南京210014【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.基于ARM7的电参数采集系统设计与应用 [J], 汪建敏
2.基于ARM7和LM35的温度采集系统设计 [J], 沈瑞;于海勋;王耀文
3.基于ARM7和USB技术的工业CT数据采集系统设计 [J], 肖慧;刘义保;赵梦云
4.基于ARM7和LabVIEW的岩土工程多路数据采集系统设计 [J], 张剑伟
5.基于LabVIEW的三分量地震数据采集系统设计 [J], 张家声;王广科;高一峰;魏建山
因版权原因,仅展示原文概要,查看原文内容请购买。
地震动探测技术
4.2 目标运动引起的地震动信号
从上述各类波在地球介质中的传播速度来看,在离震源较远的观测点处应 接收到一个地震波列,先后到达的是纵波、横波、乐夫波和瑞雷波,如图 4-1所示。
4.2.2 地震波传播理论在地震目标探测中的应用 1. 弹性波波动方程 震源区附近的介质受到不同方式的激振力时都会产生形变。介质的受力
上一页 下一页 返回
4.3 地震动信号检测系统
4.3.3 传感器信号调理与放大电路 根据某预警系统地震动探测的需要,地震传感器应能探测到300m 以内的
运动车辆及24m 以内人员脚步的信号。如此远距离条件下,由传感器探 测到的这种目标信号很微弱,通常只有几微伏至几十微伏。如此小的信号 必须先经过前置放大和预处理后才能进行采集处理。另外,由于地震动传 感器具有较强的抗电磁干扰能力,且能够全天候工作,所以,地震动传感器 作为整个地面传感器系统的一级警戒部分,一旦地震动传感器探测到有目 标出现,就会给其他传感器系统如声、磁、红外等传感器系统发出启动信 号。因此,在电池供电条件下地震动传感器的信号放大处理电路功耗应尽 量小,从而保证全系统长时间有效工作。设计一种低功耗、低噪声、高增 益放大电路,是预警类地震动探测与识别的一项关键技术。
上一页 下一页 返回
4.3 地震动信号检测系统
动圈磁电式速度传感器在火炮发射的高强度冲击和高速旋转下能否有效 地工作,取决于簧片和活动部件线圈架的力学性能。DX20动圈磁电式速 度传感器具有抗旋转结构,能够适应火炮发射条件下的高速旋转运动;活 动部件线圈架的最大直线位移不大于2mm,处于弹簧簧片的弹性范围内, 能够经受火炮发射的高强度冲击(10000g)。但是该传感器的物理尺寸较 大,不符合系统的小型化要求。在DX20的基础上进行小型化设计,有关工 厂合作研制生产了抗高强度冲击和高速旋转的、满足弹体结构尺寸要求 的小型化地震动传感器,如图4-12所示。
全方位高密度单点接收地震采集技术
Wa n g Re n k a n g 。 Ya o J i a n j u n Ca i Ai b i n g
度 地 震 资 料 满覆 盖 面 积 5 6 k m 。 通 过 与常 规 三 维 地 震 资 料 的 对 比 , 展 示 了全 方 位 高 密 度 单 点 采 集 地 震 资 料 在 薄 互 储 层 研 究 、 致密
储层各 向异性分析等方面的潜力 。 关键词 : 全方位 ; 高 密度 ; 单 点接 收 ;观 测 系统 参 数 设 计 ; 道密度 ; 面元 属 性 分 析 ; 覆 盖 次 数
Ab s t r a c t : To f u l f i l l t he r e q ui r e me n t s f o r s e i s mi c d a t a i ma g i ng a c c u r a c y a nd r e s o l u t i on o f mi no r f a ul t t hr o w ,l o w a mp l i t ud e s t r uc t ur e a nd
摘要 : 近年来 , 为满足小断距、 低 幅度 构造 和 薄 互 储 层 勘 探 对 地 震 成 像 精 度 及 分 辨 率 的 要 求 , 宽方位 、 高 密度 地 震 勘 探 采 集 技 术 得 到
持 续 的 攻 关 。 宽 方 位 地 震 资 料 为 不 同角 度 的储 层 研 究提 供 了可 能 , 缩 小 面 元尺 寸 、 加 密 空 间和 时 间域 的 数 据 采 集 密 度 , 增 加 了 目的 层的有效覆盖次数 , 在 提 高 资 料 信 噪 比 的基 础 上 提 高 地 震 资 料 的 纵 横 向分 辨 率 。 在 对 信 噪 比 、 分 辨 率 和 空 间 采 样 等 几 个 关 键 因 素
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
面向高密度地震动观测的ARM信号采集系统王旭;付继华;郭云开;李智涛;谭巧;王建军【摘要】The observation of ground motion is the precondition and basis for seismic intensity quick-report and earth-quake warning. The high density station is one of the important development direction for ground motion observation. Under the background of high density ground motion observation,it is an urgent problem how to reduce the hardware cost and have no effect on its measurement performance. For this problem,a high-precision and low-cost signal sampling system is designed with ARM processor. As the coprocessor,CPLD controls the 24-bit AD for 8-channel synchronous signal data acquisition,and processes the signals data in the same time. The signal data are stored in FIFO. ARM controls FIFO to deliver the signals to ARM.Through the analysis of experimental data,the voltage noise of the signal data acquisition system is less than 25 μV,and its dynamic range is more than 107 dB.%地震动观测是地震烈度速报与地震预警的前提和基础.而高密度台站是地震动观测的重要发展方向之一.高密度地震动观测背景下,如何在不影响其计量性能的前提下,降低硬件成本是亟待解决的问题.针对此问题,以ARM处理器为核心设计了一种高精度、多通道、低成本的信号采集系统,它以CPLD作为协处理器,控制24 bit AD进行8通道同步信号采集,并对信号进行必要的预处理,之后CPLD将AD采集的信号存储在FIFO中,由ARM控制FIFO,读出FIFO中存储数据传输给ARM.通过实验数据的分析,信号采集系统的电压噪声均方根小于25 μV,其动态范围大于107 dB.【期刊名称】《电子器件》【年(卷),期】2018(041)002【总页数】5页(P442-446)【关键词】地震动观测;信号采集;噪声测试;ARM;A/D;CPLD;FIFO【作者】王旭;付继华;郭云开;李智涛;谭巧;王建军【作者单位】中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085;中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085;中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085;中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085;中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085;中国地震局地壳应力研究所(地壳动力学重点实验室),北京100085【正文语种】中文【中图分类】P315.6地震及其次生灾害具有瞬间致灾、成灾面广、救援难度大、救灾时效性强等特点,在各类自然灾害中,地震是人类生命、财产安全的最大威胁[1]。
我国是多地震国家,地震类型多、分布广,内陆地震、海域地震和地震海啸及我国周边地区的地震威胁长期存在。
城市地震高风险与农村地区地震普遍不设防,使我国的地震灾害形势十分严峻。
虽然我国地震台网近年来得到了长足发展,但地震台网的性能很大程度上受限于地震观测仪器的密度。
地震动观测是地震烈度速报与地震预警的前提和基础。
而高密度台站是地震动观测的重要发展方向之一。
高密度地震动观测背景下,如何在不影响其计量性能的前提下,降低硬件成本是亟待解决的问题。
地震动观测仪器的成本决定了整个台网的性能与成本。
随着电子技术与信息处理技术的发展,使得兼具高性能与低成本特性的地震动观测仪器成为可能。
而传统的地震动观测仪器,通常采用DSP芯片作为协处理器,处理高速AD采样数据,并通过双口RAM与低速控制器(如ARM)实现数据交互[2]。
在这类系统中,双端口RAM扮演着DSP与ARM等数据交互的重要角色。
双口RAM具有两个独立的端口,各拥有一套相应的数据总线,地址总线和控制总线,允许两个控制器单独或异步的读写其中任意的存储单元。
为解决双端口RAM的争用问题,其不能够实现数据的同步读取。
通常情况下,DSP仅做RAM的写操作,而ARM处理器仅进行RAM的读操作。
另外双口RAM还存在功耗大、成本高等不足之处[3]。
为了解决功耗、成本敏感情况下,嵌入式系统高速信号数据采集的问题,本文设计了面向高密度地震动观测的ARM信号采集系统,其中以CPLD为协处理器实现A/D数据采集[4-5]与预处理,以FIFO为数据桥接器,连接CPLD与ARM处理器,使嵌入式系统实现了高速、高精度、多通道同步采样的数据采集。
1 系统硬件设计1.1 总体设计图1所示,面向高密度地震动观测的ARM信号采集系统由A/D数据采集[6]、CPLD协处理器、FIFO寄存器和ARM处理器等部分构成。
图1 系统硬件框图A/D数据采集是进行数据采集的前端电路的核心部件,与前端的前置放大器相配合,实现模拟信号向数字信号的转换。
CPLD是高速数据采集的前端协处理器[7],其负责A/D芯片的接口控制、时序控制以及工作模式,实现数字信号的快速获取,以及进行必要的预处理。
除此之外,CPLD还负责FIFO存储器的接口控制和时序控制,实现数据的数据串并转换,将数据写入FIFO,并将控制数据从FIFO传输到ARM系统中。
FIFO电路是数据采集中桥连CPLD与ARM芯片的部件,可实现24 bit数据扩展为32 bit数据,与ARM芯片32 bit数据线相连接。
在接口的总体设计中,在CPLD控制下,ADC转换器采集数据[8],并将接收的模拟信号转换为数字信号,通过SPI通信接口传输给可编程芯片CPLD,CPLD对数据进行预处理,通过FIFO电路传输到ARM处理器中。
1.2 AD与CPLD的接口设计在ADC芯片前端加入差分运算放大电路,主要是对差模输入信号的放大和对共模输入信号的抑制。
在电路对称的条件下,差分放大具有很强的抑制零点漂移及抑制噪声与干扰的能力,对输入模拟信号滤波和放大,提高输入信号精度[9]。
ADC的数字输入/输出,同步信号输入,同步采集信号,同步帧协议均由CPLD的I/O进行控制。
文中A/D芯片采用TI公司推出的ADS1278芯片,该芯片是24 bit工业级模数转换器,具有8通道同步采样功能,其有高速采集模式、高精度采集模式、休眠模式、以及低速采集模式。
在本文中采用高精度工作模式。
CPLD采用EPM1270T144C5芯片,本芯片具有可编程逻辑块,可编程I/O口可编程内部连线,所以其具有简单的布线结构和较强的逻辑能力。
执行速度较快,并且能够预测时间延时。
编程次数能够达到1万次,系统断电之后,编程信息不会丢失。
ADS1278与EPM1270T144C5芯片之间采用SPI接口实现数据交换。
图2所示为A/D与CPLD芯片的接口电路图。
控制ADC工作模式的ADC引脚MODE1 MODE0与CPLD的I/O连接,由协处理器CPLD来进行ADC工作模式的设定。
本文中CPLD设置MODE[1:0]=01,以成高精度工作模式进行数据采集。
ADS1278以补码的形式输出24 bit数据。
正的满刻度输入时,输出的数据编码为7FFFFFH;负的满刻度输入时,输出的数据编码为800000H。
决定数据输出格式的FORMATE2 FORMATE1 FORMATE0的引脚连接到CPLD的I/O接口,由CPLD协处理器控制数据输出格式,设定FORMAT[2:0]=001,即将数据以并行的方式输出,可以将8通道的数据同时输出。
ADC的数据输出引脚DOUT[8:1]与CPLD的I/O引脚连接,其功能是将ADC转换的数字信号通过CPLD传入FIFO中,传输的数据以并行方式输出,每个通道的数据对应相应的输出通道输出,可以完成8通道的数据同时输出[10],加快数据传输速度。
图2 A/D与CPLD芯片的接口电路图1.3 FIFO与CPLD的接口设计本文FIFO电路中FIFO型号选择IDT7205L25JI元件,是一种高速、低功耗的先进先出缓冲器,有完善的逻辑控制,应用方便可靠。
对于双端口RAM,此FIFO元件功耗低,成本低,符合设计要求。
图3所示为FIFO与CPLD芯片的接口电路图。
CPLD的I/O接口与3个FIFO的D0-D7的数据位相连,即CPLD将从ADC获得的8通道并行数据以串行方式输入到FIFO,即将24 bit数据写入到FIFO中,从FIFO电路后读出的第24 bit数据接入总线接收器,将符号位数据扩展为8 bit来完成24 bit数据扩展为32 bit数据,输出到ARM系统。
FIFO的复位信号RS,读写使能信号WR/RD均由CPLD进行程序控制。
FIFO的空信号EF,半满信号HF,满信号FF接入CPLD芯片的I/O接口,待FIFO产生这些信号变化时,可以及时的反馈回CPLD,进行中断或者其他程序控制。
在本文中,CPLD监控半满标志位HF的变化来向ARM系统发送中断申请,此中断申请是ARM从FIFO中读取数据。
图3 FIFO与CPLD芯片的接口电路图图4 程序设计流程图2 系统软件设计本文CPLD程序设计是采用的VHDL语言进行编写。
具体设计流程图如图4所示。
面向高密度地震动观测的ARM信号采集系统程序设计如图4所示。
系统上电之后,CPLD对模数转换器ADC和FIFO进行复位和初始化,之后CPLD为ADC提供一个数据采集时钟,ADC 8通道数据同时采集,CPLD获取从ADC采集的8通道24 bit串行数据,将串行数据转换为并行24 bit数据,在数据源信号有效,CPLD使FIFO 写使能信号WR有效,数据在写时钟的驱动下写入FIFO,在时钟的作用下,将24 bit并行数据写入到FIFO中,同时CPLD监控FIFO的半满标志位是否变化,如果半满标志位变化,则将此信号变化作为触发信号发送给ARM处理器。