第三章 超短基线水声定位系统概要
第3章超短基线水声定位系统

有
R T c R T c
以水平位置精度与斜距之比来衡量定位精度时有
斜距相对 定位精度
X a 12 R 2d
响应器方式
带有深度的应答器/响应器方式
2 2019/4/9
一类是根据声线入射角和已知 超短基线系统的几种定位解算方式 深度进行位置解算
( ( 测 ) 量 信 声 标 线 方 入 式 射 角 ) ( 单 程 距 离 和 角 度 ) (c)
另一类则是根据测量的距离和 声线入射角进行定位解算。
r
X Y
2 a
2 a
8
2019/4/9
3.3 入射角与距离算法 (应答器或响应器方式)
目标斜距 若使用应答器代替信标
1 R cTT , R 2
通过相位测量得到角度, 直接求出位置坐标
hR cos mx X cos a mx Xa
1 cos2 mx cos2 my
1 mx
,
Xa
3.2 入射角和深度方式(非同步信标 h cos mx 2 信标方式)位置解算 1 cos cos2
con my Ya 1 tan X tan con mx a
1
1 13 tan 21
c 2 T 2 d 2 2 2 2 12 c T d 2 d
2 2 总的均方误差 类似地,可得到 x y
13 2 Y 2d
超短基线定位系统

ORE Trackpoint 3P 超短基线定位系统超短基线定位系统(USBL)系统的基本原理是收发换能器向水下目标发送询问信号,水下目标上安装有声学应答器,应答器收到USBL收发换能器的信号后发送应答信号。
收发换能器通过测量声学信号的来回时间来测定目标离收发换能器的距离。
由于收发机上安装有多个(3个以上)水听器,通过交汇测量,可以确定水下目标相对于收发换能器的位置。
美国ORE 公司的Trackpoint 3P是一套便携式超短基线声学定位系统,它是著名的Track Point 2 系统的最新升级产品,具有友好的用户接口界面,目标跟踪量程可达1000-2000m(和选定的应答器有关),可以跟踪4个目标,经严格标定能确保其测量精度。
系统的软件平台可以是Windows 98, NT, 2000或XP。
系统的主要技术指标如下:水平位置绝对精度(不考虑涌浪影响)±斜距的 0.75% (RMS )可重复精度(不考虑涌浪影响)±斜距的0.5% (RMS)航向角分辨率 0.1°斜距测量精度±0.3 m(RMS,声速校正后)斜距分辨率0.3 m接收波束角 180°4330B信标:1000m量程4360A-D 信标:2000m跟踪目标数量4个(顺次)水下信标声源级187dB(4330B)/195dB(4360A)水下信标频率 13~27Khz水下信标波束角全向或80度(用户选定信标)信噪比40 dB @ WB 滤波接收频率 22~30 kHz,1 kHz 步长发射频率 8~30 kHz,400W 输出接收脉宽 1.3ms发射脉宽1~15 ms控制单元重量、尺寸40.6 cm (L) x 33 cm(W) x 17.5 cm (D),7.7 kg 水听器重量、尺寸50.8 cm x 7.4 cm(D),4.5 kg电缆30 m ,7.2kgHP MB Transponder/Responder (4330B型)水下信标技术指标发射输出功率80W导航应答频段22-30kHz声源级和波束角187dB @1m @1uPa,全向长度29cm直径7 cm重量(空气中) 2.0 kg重量(水中)0.8 kg耐压深度1000 m接收频段 17或19kHz接收灵敏度100dB @ 1uPa响应时间Transponder:15ms Responder : 1ms发射脉冲宽度 2 ms发射间隔 1.8s或3.6s接收灵敏度100mv, RMS电池使用寿命2秒发射周期时5 天/175,000 次电池组镍镉可充电电池,0.85Amp.外壳材料 6061铝材料可选配件充电器4324C 充电器换能器波束角全向或定向换能器(+/-30° 波束) 分体/联体换能器可以选择分体式或联体式换能器HP MB Transponder/Responder ( 4360A型)水下信标技术指标长度51cm直径8.9 cm重量(空气中) 5.0 kg重量(水中) 2.7 kg耐压深度2500 m发射频段22-30kHz接收频段16-21kHz接收灵敏度100dB @ 1uPa发射脉冲宽度 2 ms声源级193dB @1m @1uPa响应时间Transponder/Responder :15ms/1ms电池使用寿命镍镉电池 - 5 天,在3秒的放电时段使用15,000 次的情况下碱性电池 - 5 天,在3秒的放电时段使用15,000 次的情况下锂电池 - 365 天,在3秒的放电时段使用15,000 次的情况下电池组可更换的AA号电池接口XSG-5-BCL-HP表面(暴露)材料硬质铝材料(套管部分);轻质聚乙烯(锁条) ;环氧树脂加固玻璃可选配件充电器4324C-V1623 HP-MB充电器(110mA)换能器全向或定向(水声)换能器(+/-40° 波束)。
水声定位基本原理与发展趋势

一、水声定位技术简介自从1912年在美国出现了第一台水声测深仪以后,开始有了水声助航设备。
二战中,对水下目标的探测和测量受到了重视,并在战后得到了迅速的发展。
1958年,美国华盛顿大学应用物理实验室在达波湾建成了三维坐标跟踪水下武器靶场。
这种水下定位跟踪技术在六十年代后期得到广泛应用,成为鱼雷靶场的主要测试方法。
迄今为止,国内外水下武器靶场使用的水下定位跟踪系统有多种类型,按其安装方式可分为固定式跟踪系统、活动式(船载)跟踪系统和轻便式跟踪系统。
固定式跟踪系统的水下测量设备大多数固定在海底,其范围大、费用高,只能在固定海区使用;活动式跟踪系统的全部设备都固定安装在活动平台上,试验时随活动平台开往试验海区;轻便式跟踪系统的体积和重量相对较小,可以随时布放和回收,并可通过飞机、车辆和船只从一个试验区运送到另一个试验区。
这三种水下定位跟踪系统虽然在结构上有较大差别,但在原理上均是依赖于几何原理的水声学定位方法。
根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line)。
表1.1列举了这三种水声定位技术的典型基线长度。
目标声源到各个基元间的距离确定目标的位置。
短基线水声定位系统的基阵长度一般在几米到几十米的量级,利用目标发出的信号到达接收阵各个基元的时间差,解算目标的方位和距离。
超短基线定位系统的基阵长度一般在几个厘米到几十厘米的量级,它与前两种不同,利用各个基元接收信号间的相位差来解算目标的方位和距离。
若按照工作方式来划分,以上三种定位系统都可以选择使用同步信标工作方式或应答器工作方式。
采用同步信标工作方式,要求在待测目标或测量船上都安装高精度同步时钟系统,信标按规定的时刻定时发射信号,并据此确定目标位置。
应答器工作方式要求在应答和测量船上都安装询问(应答)发射机和接收机。
通常所说的水声定位系统所测得的目标位置统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。
水下综合声学定位技术简介:五种定位模式
水下综合声学定位技术简介:五种定位模式水下声学定位技术经过数十年的发展已成为各种应用和领域解决水下定位和跟踪最主要和最可靠的技术手段,从定位模式方面可分为USBL(超短基线)定位、SBL(短基线)定位、LBL(长基线)定位三种基本定位模式,和为满足某些特殊定位要求的组合定位模式:LUBL(长超短基线)定位、SLUSBL(长短超短基线)定位等。
以上定位模式简单介绍如下:USBL(超短基线)定位技术超短基线定位技术由于其系统组成简单、安装简易等特点成为应用最为广泛的水下声学定位手段,该技术主要应用与水下拖体定位跟踪、ROV定位导航、DP船声学定位参照、水下潜员跟踪定位等等。
顾名思义,该系统的测量极限非常之短,只有几十公分,且组合于单个声学换能器阵列,便于水面船安装和使用。
参考下图:USBL系统所采用的技术为相控测量技术,即通过测时得到目标距;通过相位测量测得目标的水平几垂直角度,进而确定目标的相对位置。
由于USBL系统的基线非常短,因此其测量角度的分辨率不可能很高,因此该技术系统所能提供的定位精度随斜距的增加而降低。
采用常规模拟声学技术的系统测距精度通常为20-30厘米,只有Sonardyne公司的宽带数字声学技术可达到2-3厘米;定位精度通常为0.2-0.5%X 斜距(必须经过高精度姿态改正和声速改正)。
典型的系统组成和应用如下:典型应用:水下拖体定位跟踪、ROV定位导航、DP船声学定位参照、水下潜员跟踪定位,AUV定位跟踪、遥控,BOP遥控遥测,导管架角度遥测等。
SBL(短基线)定位技术短基线定位系统组成较为简单、安装较为简易,基线由安装在船体的多个(通常4个)发射接收机组成基线,测量基线几十米,参考下图:SBL系统所采用的技术为测距定位技术,即通过测时得到目标距每个发射接收机的距离,进而确定目标的相对位置。
该技术的定位精度较USBL高,单又远远低于LBL技术,系统的操作优势不是很明显,性价比偏低,因此应用远比USBL 和LBL技术低。
超短基线水声定位系统相位差解模糊算法研究

超短基线水声定位系统相位差解模糊算法研究王燕;李晴;张光普;梁国龙;马世龙【摘要】基于窄带信号的超短基线水声定位系统通常面临相位差模糊与定位精度之间的矛盾.针对信号频率较高时难以构造传统解模糊方法所需的小于信号半波长阵元间距的问题,提出了一种基于广义最大似然准则的相位差解模糊算法.该算法通过模糊数向量初始化将解模糊问题转化为多元复合假设检验问题,并采用广义最大似然准则判决,进而估计信号方向.该算法无需构造小于半波长的阵元间距,有效扩大了无模糊阵列孔径,且对阵元布放方式要求较低;允分利用了相位差观测数据的统计特性,测向精度接近克拉美-罗界.仿真结果验证了该算法的有效性.%Ultra-short baseline (USBL) underwater acoustic positioning systems utilizing narrow band signals are always confronted with the contradiction between phase-difference ambiguity and positioning accuracy.When the signal frequency is high,it is difficult to construct an array with an interval less than a half-wavelength which is always employed in traditional ambiguity resolution technique.Aiming at this problem,a phase-difference ambiguity resolution method based on the generalized maximum likelihood (GML) rule is proposed.Firstly,with vectors of the ambiguity integers initialized,the ambiguity resolution problem is formulated as problem of multiple composite hypothesis testing.Then decision can be made through the GML rule and direction of arrival is obtained.With inter-sensor spacing exceeding half the wavelength,the proposed method effectively extends the unambiguous array aperture and constraint on array configuration is easy to be met.Additionally,under full consideration of the statisticalcharacteristics of observation data,accuracy of direction estimation approaches the Cramer-Rao bound.Simulation results verify the effectiveness of the proposed method.【期刊名称】《电子学报》【年(卷),期】2017(045)011【总页数】8页(P2787-2794)【关键词】相位差模糊;测向;多元复合假设检验;超短基线定位【作者】王燕;李晴;张光普;梁国龙;马世龙【作者单位】哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TN911.7信号波达方向(Direction of Arrival,DOA)估计在雷达、声纳、通信等军事及民用领域具有重要的应用价值[1~3].超短基线水声定位系统通过测量接收基元间的相位差估计信号波达方向从而实现对水下目标的定位[4].当阵元间距大于信号半波长时,测量相位差可能与真实相位差相差2π的整数倍,称之为相位差模糊,该倍数称为模糊数,求解模糊数的过程则称为解模糊.相位差解模糊是超短基线系统实现准确定位的关键问题.工程应用中通常利用小于半波长的较短基线与较长基线相结合的方式消除相位差模糊.测量误差一定时,其性能随较长基线与较短基线长度之比增大而降低.此外,信号频率较高时,考虑到遮挡与耦合问题,可能难以实现半波长间距的阵元配置.通过构造多元非均匀阵列,利用多条基线的长度关系可以实现相位差解模糊[5~7],且最小阵元间距可以超过半波长.基于余数定理法[8]理论上可以直接求得最长基线的模糊数,但是要求基线长度两两互质,且对噪声敏感.逐次解模糊法[9,10]通过构造小于半波长的虚拟基线得到无模糊的二次相位差,从而逐步求解其它基线的模糊数,通常只适用于特定的阵型,且解模糊性能受相位差误差及各基线长度之比影响较大.多组比值解模糊法[11]先利用相邻基线的长度比求解可能的模糊数组合,再得到一组公共的模糊数,其性能受相邻基线长度的最大公因子大小的影响.相关搜索法[12,13]建立理论参考数据与测量相位差之间的相似性代价函数,并通过网格搜索的方法选取使代价函数最小的角度作为信号入射方向.当网格划分较大时,容易产生理论数据与实际相位差的失配,从而导致解模糊失败;而网格划分较小时,所需要的存储空间及运算量增大,算法效率降低.另外,现有的多基线解模糊方法通常将基线间相位差测量误差看作统计独立的,测向结果通常是利用最长基线或一部分基线估计得到的,估计精度具有局限性.文献[14]中考虑了相位差测量误差之间的相关性并采用最小二乘方法估计波达角度,但并未考虑相位差模糊问题.本文利用相位差测量误差的统计特性将相位差解模糊问题转化为多元复合假设检验问题,并提出了基于广义最大似然准则的解模糊方法.该方法以最长基线测量相位差为基准进行模糊数向量初始化,减少了多维整数搜索的次数.文中推导了波达角的可观测条件并对其估计精度进行了理论分析.该算法有效增大了无模糊阵列孔径,且对阵型要求较低,充分利用了相位差观测数据,可以实现对信号方向的高精度估计.超短基线系统定位原理[15]如图1所示,三个阵元位于两条互相垂直的基线上,基线长度均为d,阵元1位于坐标原点处.设目标位于S0处,其水平位置坐标为[x,y]T,测量得到目标与阵元1间的斜距为R,则其中,αx和αy分别为目标位置矢量与x轴和y轴的夹角.S′为S0在xoy平面上的投影,其位置矢量与x轴的夹角αS0为目标水平方位角,且αx和αy可以通过分别测量信号到达阵元1和阵元2间的相位差φ12以及阵元1和阵元3间的相位差φ13得到,即其中,κ=为信号波数,λ=为信号波长,f0为信号频率,c为水中声速.可见,准确测量信号波达角αx和αy对提高超短基线系统定位精度具有重要意义.增大阵元间距通常有利于提高波达角估计精度,但是当d>时,测量相位差可能会出现2π模糊,即产生相位差模糊问题.相位差模糊会进一步导致定位模糊,因此,解模糊测向是超短基线系统实现准确定位的关键问题,本文重点针对此问题展开研究.考虑到两组阵元波达角估计过程相对独立,为了便于分析,下面均以一组阵元为模型进行相位差模糊问题的描述及解模糊算法的研究.不失一般性,考虑由阵元1和阵元2构成的二元阵列,两阵元间相位差为其中,α∈[0,π]为信号入射方向与x轴正方向的夹角.设测量相位差为ψ∈(-π,π],则其中,δ为相位差测量误差,整数k为模糊数,k=0,±1,±2….由式(6)可见,当d>时,相位差模糊问题导致测量相位差ψ与多个可能的信号入射方向对应,但是只有真实模糊数对应的角度为波达角α的估计值.解模糊的目的就是通过求得真实模糊数,对测量相位差进行补偿从而得到无模糊的相位差,进而估计信号的入射角度.3.1 理论模型在间距大于半波长的双阵元之间加入(M-2)个辅助阵元,形成M元非均匀线列阵,且阵元间距最小值超过半波长.以第M个阵元为基准,形成N=M-1条基线,如图2所示,基线长度分别为d1,d2,…,dN.对于第n条基线,有其中,φn=κdncosα为相位差真值,δn为第n个阵元和参考阵元间的相位差测量误差,δn=εn-εM,εn和εM分别为第n个阵元和参考阵元的相位测量误差.假设不同阵元的相位测量误差统计独立,且均服从方差为σ2的零均值高斯分布,即εn~N(0,σ2),n=1,2,…,M,则其中N.设各条基线测量相位差向量为X=[ψ1,ψ2,…,ψN]T,信号入射角度余弦值为β=cosα,模糊数向量k=[k1,k2,…,kN]T,则观测数据可以写成如下形式其中,L=[κd1,κd2,…,κdN]T,δ=[δ1,δ2,…,δN]T为相位差测量误差向量,其协方差矩阵为C,即δ~N(0,C),其中,C=σ2C0,C0=I+UUT,I为N×N阶单位矩阵,U为元素均为1的N×1维向量.由式(8)可见,阵列的一组相位差观测量对应多种可能的模糊数向量,但是只有一个真实模糊数向量对应的角度为信号真实方向的估计值.因此,问题的关键在于如何从多个可能的模糊数向量中判别出真实模糊数向量.本文将解模糊问题转化为多元复合假设检验问题,将各个可能的模糊数向量与不同的假设条件对应,判决真实模糊数向量对应的假设为真则实现了正确解模糊.3.2 模糊数向量初始化理论上可以通过多维整数搜索获得所有的模糊数向量,但是这样得到的模糊数向量存在大量的冗余,极大地增加了后续假设检验问题求解的复杂度.下面,在充分挖掘相位差观测数据中隐含的信号入射角度信息的基础上,给出本文模糊数向量的初始化方法.由式(7)可得图2中阵列最长基线的模糊数k1的表达式为其中为最长基线的无模糊相位差,相位差真值φ1∈[-κd1,κd1].当时,k1的可能取值集合为为整数集,对应的可能取值构成集合}.可见,由集合Sψ={ψ1}到Sφ为一对多映射,记为算子f:Sψ→Sφ.当信号入射方向靠近阵列轴向时,相位差真值φ1趋近于其取值范围的边界.受测量误差的影响,实际值可能超过边界,即∉[-κd1,κd1].而Sφ中元素均在[-κd1,κd1]范围内,则当超过边界时,Sφ中没有与φ1相对应的元素.针对此问题,本文将φ1取值范围的边界值作为其合理估计对Sφ进行补充,设估计误差为则|.设补充相位差集合为则其中和分别为集合Sφ中元素的最大值和最小值,门限γ满足γ≤2π-δmax,δmax为相位差测量误差的最大值,且|δn|≤δmax,n=1,2,…,N.关于门限γ的取值,下文将给出更进一步的说明.至此得到补充后的离散相位差集合且对于中均包含与相位差真值φ1相对应的元素,将其记为则且设的基数为由中的元素对各基线的模糊数进行估计其中,[·]表示取整,则一共得到Q个模糊数向量Q.由于需要通过后续的多元假设检验从这Q个向量中判别出真实模糊数向量进而解模糊,因此能够实现正确解模糊的前提是这组向量中包括真实模糊数向量,又中的元素与相位差真值相对应,则要求通过可以求得各基线的真实模糊数.将的表达式代入式(11),并结合式(7)可得其中,kn为第n条基线的真实模糊数,φ1dn=φnd1,则需满足由于δn≤δmax,则相位差测量误差的最大值需满足δmax<πd1/(d1+dn).又dn≤d1,则当δmax<π/2时,可以由求得各基线的真实模糊数,从而得到真实模糊数向量kt=[k1,k2,…,kN]t.式(10)中,对Sφ进行补充的门限需满足γ≤2π-δmax,因此,当δmax<π/2时,只需使门限值γ≤3π/2即可确保中包含并且由求得kt=k.综上,当相位差测量误差最大值满足δmax<π/2时,通过上述初始化方法可以得到Q个模糊数向量且其中包括真实模糊数向量.下面通过构建多元复合假设检验模型对这组向量中的真实模糊数向量进行判别,从而实现解模糊.3.3 多元复合假设检验模型的构建及算法实现考虑(N+2)×1维参数矢量的复合假设检验问题,其中θr=k是N×1维的模糊数向量,θs=[β,σ2]T是2×1维未知的非随机参数向量,β=cosα为信号入射角度余弦值,σ2为相位测量误差方差,本文算法无需相位测量误差方差的先验信息.概率密度函数以θ为参数,可以表示为p(X;θ)=p(X;k,θs).假设检验是对于式(14)中含有未知参量的多元假设检验问题,根据广义最大似然准则[16],如果当q=t是最大时判Ht,其中是θs在Hq条件下的最大似然估计(Maximum Likelihood Estimation,MLE),可以通过使p(X;kq,θs|Hq)关于θs最大而求得.Hq条件下的概率密度函数为首先,通过使p(X;kq,β,σ2|Hq)关于β最大求取对数似然函数关于β的导数,并令它等于零,得σ2在Hq条件下的MLE是通过使关于σ2最大而求得的,令Xq=X+2πkq,有其中,则根据式(15),有忽略常数项,再乘以-1,我们有因此,如果当q=t时,式(21)最小,则判Ht为真,而使式(21)达到最小等价于使Aq达到最小,因此最终的检验统计量简化为Aq,判决准则为如果当q=t时,Aq 最小,则判Ht为真,对应的为信号入射角余弦MLE.考虑到信号入射方向靠近阵列轴向时,实际无模糊相位差受噪声影响存在超过边界的问题,可能有∉-1,1,因此进行如下处理则波达角估计值为综上所述,基于广义最大似然准则的相位差解模糊算法的具体实现步骤总结如下:(1)根据算子f求得集合Sφ,并由式(10)求得集合进而得到(2)根据式(11),由集合中的元素对各基线的模糊数进行估计,从而对模糊数向量进行初始化.(3)利用第(2)步得到的模糊数向量构建多元复合假设检验模型,计算各个假设条件下的检验统计量,如式(19)所示,并判决使其最小的假设Ht为真.最后由式(22)修正得到角度估计值4.1 波达角可观测性分析首先给出本文算法在[0,π]范围内角度估计无模糊,即波达角可观测的条件.设图2中N条基线的长度为dn=d0Pn,且d1>d2>…>dN,其中,d0为正有理数,Pn 为正整数,则波达角可观测需要满足以下条件:(1) P1,P2,…,PN的最大公因子为1,记为GCD(P1,P2,…,PN)=1,即P1,P2,…,PN为最大公因子为1的递减互异正整数.(2)d0<.证明如下:不考虑噪声的干扰,在假设条件Hq和Ht下分别可以得到其中,X0为(-π,π]区间内的相位差真值向量和分别为两个假设下β的MLE,且和et分别为对应的估计偏差向量.设kt为真实模糊数向量,则et=0,对应的检验统计量At=0.由式(23)及式(24)可得Hq条件下检验统计量为其中如果对于Aq,q=1,2,…,Q,且q≠t,均有Aq>At,则本文算法可以实现对波达角的无模糊估计.相反地,如果存在Aq,q≠t,使得Aq=At=0,则产生角度估计模糊,此时根据式(25),有ρL=2πΔ,对其整理可得其中,γ0=ρd0/λ.当GCD(P1,P2,…,PN)=1时,式(26)成立需满足,γ0≥1,即ρ≥λ/d0.又ρ≤2,则有d0≥λ/2,这与d0<λ/2相矛盾,因此当GCD(P1,P2,…,PN)=1且d0<λ/2时不会产生模糊.余数定理法解模糊[8]要求P1,P2,…,PN两两互素,即GCD(Pi,Pj)=1,i=1,2,…,N,j=1,2,…,N,且i≠j.逐级解模糊算法[9,10]需要构造间距差小于半波长的一组阵元对,且算法只适用于特定的阵型.与二者相比,本文算法对阵元分布的要求更加宽松,在实际应用中更容易达到,且算法通用性较强.4.2 波达角估计精度分析设无模糊相位差向量则且X′的联合概率密度函数为则X′的Fisher信息为可得波达角估计克拉美-罗界(Cramer-Rao Bound,CRB)为其中,σα为标准差下界.由式(17)可得本文算法方向余弦的均方误差(Mean Square Error,MSE)为又则其中为式(30)中真实角度α的估计.结合式(30)和式(32)可见,在一定相位差测量误差条件下,本文算法的角度估计均方误差近似于CRB.因此,与传统构造小于半波长阵元间距的解模糊测向方法相比,本文算法有效增大了无模糊阵列孔径,且考虑了相位差测量误差之间的相关性,充分利用了所有基线的观测数据,波达角估计精度更高.为了验证本文算法的解模糊测向性能,采用Monte Carlo重复试验统计正确解模糊概率及测向误差.设Monte Carlo试验次数为NMC,仿真中NMC=10000.将求得的各基线模糊数等于对应的真实模糊数称为正确解模糊,则正确解模糊概率是指正确解模糊的次数与NMC之比.角度估计均方根误差(Root Mean Square Error,RMSE)为其中为单次仿真的波达角估计值.场景条件如下:信号为CW脉冲,频率f0=75kHz,水中声速c=1500m/s,信号波长λ=0.02m.参照文献[9]中逐级法的要求设计五元直线阵,以最右侧阵元为参考,基线长度向量d=[45d0,33d0,18d0,4d0]T,其中d0=λ/5,则基线长度比为P1:P2:P3:P4=45:33:18:4,容易验证该阵元布放方式满足本文算法的波达角可观测性条件,且阵元间距超过半波长.5.1 不同相位差测量误差下性能比较统计信号入射角度α=50°,相位差测量误差标准差σδ∈[0°,30°]条件下不同算法的正确解模糊概率及测向均方根误差,结果如图3所示.图例中,“逐级”表示逐级解模糊算法[9]仿真结果,“比值”表示比值解模糊算法[11]仿真结果,“搜索”表示相关搜索算法[12]仿真结果,其角度搜索范围[0,π],步长为0.1°,“本文”表示本文算法仿真结果,其补充相位差门限取γ=.由图3(a)可见,当σδ≤5°时,逐级法解模糊概率可达到1,与文献[9]中给出的正确解模糊的条件δmax<π/(2kv+2)相符,其中相邻两级虚拟基线长度比值kv=3.对于比值法,当δmax<min[GCD(Pn,Pn+1)π/(Pn+Pn+1)],n=1,2,3时,即δmax<π/26时才能够正确解模糊,因此当σδ=5°时,其正确解模糊概率已经小于1.而本文算法与搜索法在σδ≤15°条件下均可以100%正确解模糊,且随着σδ的增大,正确概率明显高于逐级法和比值法.与相关搜索法相比,本文算法充分利用测量相位差中的信号方向信息对模糊数向量进行初始化,减少了多维整数搜索的次数,且无需进行网格搜索,算法效率较高.图3(b)中并未给出比值法的测向精度,因为其正确解模糊概率随着相位差误差增大而急剧降低,得到的精度统计意义较小.逐级法的测向精度由最长基线长度决定.搜索法采用余弦函数形式的代价函数,不具有明确的物理意义.本文算法充分利用了相位差测量误差的统计特性,得到了波达角的最大似然估计,测向均方根误差低于逐级法及搜索法,σδ∈[0°,30°]条件下能够达到CRB.5.2 不同入射角下性能比较图4给出了σδ=30°,信号入射角度α在0°~180°范围内不同方法的正确解模糊概率及测向精度,其中,对逐级法及比值法也做了如式(22)所示的处理.由图4(a)可见,当σδ=30°时,比值法和逐级法正确解模糊概率分别约为0.1和0.5,而本文算法正确概率不低于0.93,远高于比值法和逐级法.图4(b)中,当信号靠近轴向入射时,搜索法正确概率明显下降,这是由于实际无模糊相位差超过边界造成真实角度对应的理论相位差与测量相位差失配,从而导致解模糊失败.本文算法在模糊数向量初始化时采用边界相位差对直接由最长基线相位差测量值周期展开得到的离散相位差集合进行了补偿,因此轴向附近正确解模糊概率没有明显下降. 由图4(c)及图4(d)可见,当α在0°~180°范围内时,本文算法测向精度始终高于逐级法及搜索法,且当α在20°~160°范围内时,本文算法测向均方根误差始终接近CRB.图4(c)中,当信号入射方向接近轴向时,测向误差显著增大.针对这种情况,图5给出了当目标位于xoy平面上,其水平方位角αS0在0°~180°范围内时,仅采用x轴上直线阵或y轴上直线阵估计αS0以及根据式(2)联合两条直线阵估计αS0的正确解模糊概率和估计均方根误差的统计结果.(αS0在180°~360°范围内的结果与图5相似,此处略去.)由图5(a)可见,由于两条线阵的解模糊过程相对独立,因此两条阵联合正确解模糊概率是分别采用一条阵的正确解模糊概率之积.由图5(b)可见,当目标水平方位角αS0在0°和180°附近,即信号入射方向在x轴附近时,仅采用位于x轴上的线阵估计αS0的误差显著增大.同理,当αS0在90°附近,即信号入射方向在y轴附近时,仅采用位于y轴上的线阵估计αS0的误差较大.而联合两条线阵估计αS0时对于不同的目标水平方位角,估计精度均较高.针对超短基线水声定位系统面临的相位差模糊问题,本文构建了多元复合假设检验模型,提出一种基于广义最大似然准则的相位差解模糊算法.对波达角可观测性及估计精度进行了理论分析,并进行了仿真验证.结果表明,该算法无需构造传统解模糊算法所需的小于半波长间距的阵列,有效扩大了无模糊阵列孔径,对阵元布放方式要求较低,算法通用性较高,能够有效消除相位差模糊.该算法利用相位差观测数据进行模糊数向量初始化,减少了多维整数搜索的次数,并且充分利用了相位差观测数据的统计特性,测向精度可接近CRB.与以往方法相比,相同条件下解模糊性能及测向精度均较高,且无需网格搜索.此外,虽然该算法是针对基于窄带信号的超短基线定位中存在的相位差模糊问题提出的,其基本思想也可扩展用于解决宽带超短基线定位中的相位差模糊问题,但具体处理过程需要根据实际应用条件进行适应性调整.篇幅所限本文不再展开叙述,相关问题将在后续工作中进行研究.王燕女,1973年生于辽宁沈阳.哈尔滨工程大学水声工程学院教授、博士生导师,主要研究方向为水声信号处理、水声工程、水声目标探测与定位.李晴女,1989年生于吉林农安.哈尔滨工程大学水声工程学院博士研究生,研究方向为水声信号处理、水声目标探测与定位.E-mail:******************张光普(通信作者) 男,1979年生于吉林四平.哈尔滨工程大学水声工程学院副教授、博士生导师,主要研究方向为水声定位与导航、矢量信号处理.E-mail:**********************.cn【相关文献】[1]Liu Z M,Guo F C.Azimuth and elevation estimation with rotating long-baseline interferometers[J].IEEE Transactions on Signal Processing,2015,63(9):2405-2419.[2]Wu Y Q,Hu Z L,et al.Source number detectability by an acoustic vector sensor linear array and performance analysis[J].IEEE Journal of Oceanic Engineering,2014,39(4):769-778.[3]Gorcin A,Arslan H.A two-antenna single RF front-end DOA estimation system for wireless communications signals [J].IEEE Transactions on Antennas andPropagation,2014,62(10):5321-5333.[4]韩云峰,李昭,等.一种基于长基线交汇的超短基线定位系统精度评价方法[J].物理学报,2015,64(9):094301,1-7.Han Yunfeng,Li Zhao,et al.A precision evaluation method of USBL positioning systems based on LBL triangulation[J].Acta Phys Sin,2015,64(9):094301,1-7.(in Chinese)[5]狄慧,刘渝,等.联合到达时间估计的长基线测向相位解模糊算法研究[J].电子学报,2013,41(3):496-501.Di Hui,Liu Yu,et al.Long baseline direction finding unwrapping phase ambiguity algorithm with TOA estimation [J].Acta Electronica Sinica,2013,41(3):496-501.(in Chinese)[6]Ballal T,Bleakley C J.Phase-difference ambiguity resolution for a single-frequency signal[J].IEEE Signal Processing Letters,2008,15:853-856.[7]Lee J H,Woo J M.Interferometer direction-finding system with improved DF accuracy using two different array configurations[J].IEEE Antennas and Wireless Propagation Letters,2015,14:719-722.[8]周亚强,皇甫堪.噪扰条件下数字式多基线相位干涉仪解模糊问题[J].通信学报,2005,26(8):16-21. Zhou Yaqiang,Huangfu Kan.Solving ambiguity problem of digitized multi-baseline interferometer under noisy circumstance[J].Journal on Communications,2005,26(8):16-21.(in Chinese)[9]龚享铱,皇甫堪,等.基于相位干涉仪阵列二次相位差的波达角估计算法研究[J].电子学报,2005,33(3):444-446.Gong Xiangyi,Huangfu Kan,et al.A new algorithm for estimation of direction of arrival based on the second-order difference of phase of interferometer array[J].Acta Electronica Sinica,2005,33(3):444-446.(in Chinese)[10]Ly P Q C,Elton S D,et al.Unambiguous AOA estimation using SODA interferometry for electronic surveillance[A].IEEE 7th Sensor Array and Multichannel Signal Processing Workshop[C].Hoboken:IEEE Press,2012.277-280.[11]龚享铱,袁俊泉,等.基于相位干涉仪阵列多组解模糊的波达角估计算法研究[J].电子与信息学报,2006,28(1):55-59.Gong Xiangyi,Yuan Junquan ,et al .A multi-pare unwrap ambiguity of interferometer array for estimation of direction of arrival[J].Journal of Electronics & Information Technology,2006,28(1):55-59.(in Chinese)[12]魏合文,王军,等.一种基于余弦函数的相位干涉仪阵列DOA估计算法[J].电子与信息学报,2007,29(11):2665-2668.Wei Hewen,Wang Jun,et al.An algorithm of estimation direction of arrival for phase interferometer array using cosine function[J].Journal of Electronics & Information Technology,2007,29(11):2665-2668.(in Chinese)[13]Wei H W,Shi Y G.Performance analysis and comparison of correlative interferometers for direction finding[A].IEEE 10th International Conference on SignalProcessing[C].Beijing:IEEE Press,2010.393-396.[14]Wu Y W,Rhodes S,et al.Direction of arrival estimation via extended phase interferometry[J].IEEE Transactions on Aerospace and Electronic Systems,1995,31(1):375-381.[15]田坦.水下定位与导航技术[M].北京:国防工业出版社,2007.28-34.[16]Kay S M.Fundamentals of statistical signal processing,volume II:detectiontheory[M].New Jersey:Prentice Hall,1998.221-225.。
水声技术在海洋工程中的应用研究
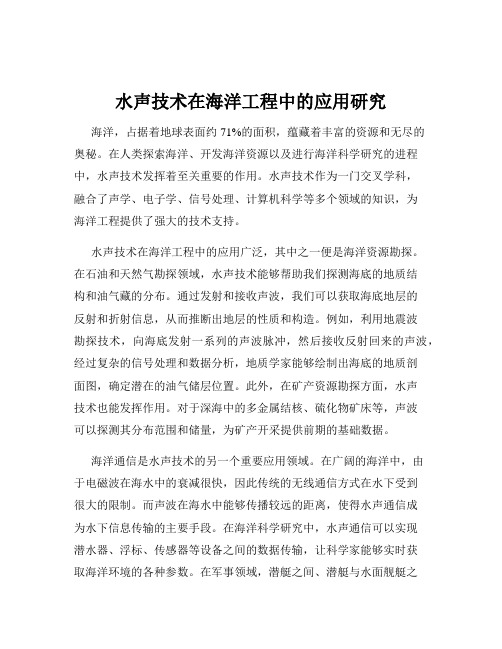
水声技术在海洋工程中的应用研究海洋,占据着地球表面约 71%的面积,蕴藏着丰富的资源和无尽的奥秘。
在人类探索海洋、开发海洋资源以及进行海洋科学研究的进程中,水声技术发挥着至关重要的作用。
水声技术作为一门交叉学科,融合了声学、电子学、信号处理、计算机科学等多个领域的知识,为海洋工程提供了强大的技术支持。
水声技术在海洋工程中的应用广泛,其中之一便是海洋资源勘探。
在石油和天然气勘探领域,水声技术能够帮助我们探测海底的地质结构和油气藏的分布。
通过发射和接收声波,我们可以获取海底地层的反射和折射信息,从而推断出地层的性质和构造。
例如,利用地震波勘探技术,向海底发射一系列的声波脉冲,然后接收反射回来的声波,经过复杂的信号处理和数据分析,地质学家能够绘制出海底的地质剖面图,确定潜在的油气储层位置。
此外,在矿产资源勘探方面,水声技术也能发挥作用。
对于深海中的多金属结核、硫化物矿床等,声波可以探测其分布范围和储量,为矿产开采提供前期的基础数据。
海洋通信是水声技术的另一个重要应用领域。
在广阔的海洋中,由于电磁波在海水中的衰减很快,因此传统的无线通信方式在水下受到很大的限制。
而声波在海水中能够传播较远的距离,使得水声通信成为水下信息传输的主要手段。
在海洋科学研究中,水声通信可以实现潜水器、浮标、传感器等设备之间的数据传输,让科学家能够实时获取海洋环境的各种参数。
在军事领域,潜艇之间、潜艇与水面舰艇之间的通信也依赖于水声技术。
通过先进的编码和调制技术,提高水声通信的速率和可靠性,实现语音、图像和数据的准确传输。
同时,为了保障通信的安全性,水声通信还需要采用加密技术,防止信息被窃取和干扰。
在海洋工程的建设中,水声技术同样不可或缺。
例如,在海洋平台的建设过程中,需要对海底地形进行精确测量,以确定平台的位置和基础的设计。
水声测深技术能够快速、准确地获取大面积的海底地形数据,为平台的建设提供可靠的依据。
此外,在海底管道和电缆的铺设中,水声定位技术可以实时监测铺设设备的位置和姿态,确保管道和电缆的铺设精度和质量。
超短基线定位原理
超短基线定位原理
超短基线定位(Ultra-Short Baseline,简称USBL)是一种海洋定位技术,它利用声波传播的特性,在水下环境中进行位置的测量。
USBL定位系统主要由发射器、接收器、控制器和计算机组成,其原理是通过发射一定频率的声波信号,然后由接收器接收到反射回来的信号,通过测量声波的传播时间和信号的强度等参数,可以计算出声波信号发射器和接收器之间的距离和方向。
在进行USBL定位时,需要将发射器安装在水下航行器上,接收器则安装在水下固定点上,通过发射器和接收器之间的声波信号进行交互,可以精准地测量出航行器的位置。
此外,通过同时使用多个接收器和发射器,可以进一步提高定位精度。
USBL定位技术具有定位精度高、适用范围广等优点,在海洋勘探、水下作业、海洋科学研究等领域得到了广泛的应用。
目前,USBL定位技术已成为海洋勘探和水下作业中的重要手段之一。
水声定位

各个水听器测的与目标的斜距为:
长基线水声定位系统
目标与原点的斜距为:
将式中
展开得:
从而得到:
ri
消去
r
可得方程:
用矩阵可写作:
其中,
但矩阵A奇异,因此方程有多个解,得不到唯一解。考虑再增加一个水听器, 并测得它与目标的斜距 r4,可得另一个方程:
消去
r 得:
用上式代替矩阵方程第三行,则矩阵A非奇异,方程组可得到唯一解。 但当水听器都位于同一水平面,且 仍然是奇异矩阵,可用三个水听器得测量值以及 已知时 ,矩阵A 联立,得方程组:
在海底布设由T1,T2,T3组成的水听 器接收基阵,在直角坐标系坐标分别为
T1 (x1, y1,z1), T2 (x 2 , y2 ,z2 ), T3 (x3 , y3 ,z3 ) ,水听器位置
校准后,则假定坐标为已知量。 各个水听器到原点的距离为:
di xi 2 yi2 zi2 (i 1, 2,3)
短基线水声定位
系统组成: 1) 被定位的船或潜器上至少有3个水听器。 2) 间距在5~20米的量级。 3) 水面船上面装有问答机 4) 一个同步信标(或应答器)置于海底 工作原理 问答机接收来自信标(或应答器)发出的信号, 根据信号到达各基元的时间,求得斜距,据此可计算 水面船相对于信标(或应答器)的位置。
超短基线定位系统的基阵长度一般在几厘米到几十厘米,与前两种不同,利
用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式划分,以上三种定位系统都可以选择使用同步信标或应
答器工作方式。
询问器或问答机:是安装在船上的发射器和接收器。它以一个频率发出询 问信号,并以另一频率接收回答信号。接收频率可以多个,对应于多个应 答器,常常只相隔0.5kHz。发射和接收换能器是无指向性的。 应答器:是置于海底或装在载体上的发射/接收器。它接收问答机的询问信 号(或指令),发回另一与接收频率不同的回答信号。收发换能器无指向 性的。 声信标:置于海底或装在水下载体(潜器)上的发射器,它以特定频率不 停的发出声脉冲。它是自主工作的。声信标分同步式和非同步式两种。 响应器:置于海底或装在水下载体(潜器)上的发射器,它由外部硬件 (如控制线)的控制信号触发,发出询问信号。问答机或其它水听器接收 它的信号。它常用于噪声较强的场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018/10/6
3.4 超短基线定位系统定位误差分析
位置测量的相对误差表示式 位置相对 X a R 12 d 定位精度 X a R 12 d 斜距R和λ的相对误差 :由 R cT和 c / f 0
mx ( ) 12 ( ) x /R
(%) 85 16.73 0.52 80 33.3 0.52 70 65.7 0.52 60 96 0.52 50 123.4 0.52 40 147.1 0.52 30 166.3 0.52 20 180.4 0.52
x / x
(%)
5.98
3.003
1 mx
,
Xa
3.2 入射角和深度方式(非同步信标 h cos mx 2 信标方式)位置解算 1 cos cos2
con my Ya 1 tan X tan con mx a
1
1 13 tan 21
误差分析的目的:分析应答器在基阵坐标系下 的位置解算误差,即求 Δ Xa 、 Δ Ya 、 Δ Za 分别 为多少?
分析方法:
10
2018/10/6
3.4 超短基线定位系统定位误差分析
Xa、Ya、Za的求解公式
X a R cos mx
2
12 R 2 d
2 12 2 2 13
r
X Y
2 a
2 a
8
2018/10/6
3.3 入射角与距离算法 (应答器或响应器方式)
目标斜距 若使用应答器代替信标
1 R cTT , R 2
通过相位测量得到角度, 直接求出位置坐标
hR cos mx X cos a mx Xa
1 cos2 mx cos2 my
12 cos 2 d
1
13 cos 2 d
1
Xa
h cos mx 1 cos2 mx cos2 my
Ya
h cos my 1 cos mx cos my
3.4 超短基线定位系统定位误差分析
2 2 2 2 2 2
2
注意:衡量相对定位误差时,两个相对误差公式计 x 12 c 算的量值随 θ m的减小的趋势是不同的。 cos mx 12 12 R 12 2d 2f 0 d 在只考虑相位差测量误差时 12 ,c=1500m/s 2d ,h=4000m, 例: 20kHz , dR =0.04m Xfa0= R cos mx 12 cos mx 2 d △φ=1° 表3.1 在不同θ m下,相位差测量相对误差
第一项:声速引起的误差
→0 第二项:测时误差引起的误差
x2 y2
第三项:阵元间距不准引起的误差 第四项:相位测量误差引起的误差,与角度θmx ,θ my有关:
当 接近 90°(即信标或应答器在基阵的下方)时,相位差很小, 前3项影响很小,相位测量误差起主要作用。 2 d 随θmx ,θ my 减小,前3项影响加大
13 2018/10/6
3.4 超短基线定位系统定位误差分析
分析:
12 2 X 2d
2
c 2 T 2 d 2 2 2 12 2 c T d 2d
2
因此有
2 d
1
cos m
mx
my
12 cos 2 d
13 cos 2 d
1
6 2018/10/6
3.2 入射角和深度方式(非同步信标 信标方式)位置解算 算法小结
先测得两换 能器接收信 mx 号的相位差, 然后利用公 式解算信标 在船坐标系 my 下的位置坐 标。
2 2
7 2018/10/6
12 my mx cos 在某些场合,要求目标的坐标,要以水平距离和水平面内的目 2 h cos d my 标方位角给出。 Ya 2 1 cos2 cos my mx 1 13 在水平面内以极坐标形式给出 θ my cos r 2 d
应 答 器 方 式
( 距 离 和 角 度 ) (d) 答 器 响 应 器 方 式
a
(b)
已知
/
响 应 器 方 式
将测得的斜距、 入射角与深度组 合,从而提高定 位精度。
3
有 深 度 的 应
2018/10/6
3.2 入射角和深度方式(非同步信标 信标方式)位置解算
结构及定位解算图: 3个水听器摆成L型。 位置解算: 信标位置(Xa,Ta,Za) 3个水听器按L型布 置,间距为d 。
测时误差为
t
1 B SNR
1/ T
改善测时误差可增加接收机输出信号/噪声比和带宽
当采用CW脉冲时,信号带宽与脉冲宽度成反比,即,B
而匹配滤波器输出信/噪比为 因此有
测相误差为
t T
E KT SNR n0 n0
当信标或应答器在靠近基阵所在平面 (即角度很小)时,因有反射声 影响,精度也难保证。
cos m
结论: 超短基线系统只在基阵下方一个有限的锥体内定位精度较高 改进措施:加大基阵尺寸;采用宽带信号
14 2018/10/6
x X a T c 12 d 12 2 = 误差与 X θ m 的变化关系 a X a T c 12 d 12
1 c c f0 c 12 Xa R代入上式可得 X a T 2 c 12 d 2 d Xa T c 12 d
有
R T c R T c
以水平位置精度与斜距之比来衡量定位精度时有
斜距相对 定位精度
X a 12 R 2d
d
4
2018/10/6
3.2 入射角和深度方式(非同步信标 信标方式)位置解算
R与信标的坐标Xa,Ya及深度的关系为
2 R 2 Ya2 X a h2
而
X R cos mx
Y R cos my
2 2
2 a 2 a
2
2
从而解得
Xa
h cos mx 1 cos2 mx cos2 my
2
c 2 T 2 d 2 2 2 2 13 c T d 2 d
结论:信标或应答器在基阵的下方时,定位误差 主要来源于相位测量误差。
“跳象限”的情况主要由水面反射引起,可通过信号 处理的方法解决。
以前采用单频信号时,对信号处理的手段未进行较深入地研 究,存在此种问题。 现在采用宽带信号,信号处理的手段也较高,“跳象限”的 问题可以解决。
16 2018/10/6
3.5 改善超短基线定位系统 定位精度的措施
分析 不考虑声速和阵元间距误差的情况下 12 R X a R 12 2d 2d
定位误差与阵元间距d成反比,d大则误差减小; 与测距精度和测相精度成正比,测距精度和测相精度高则误差 小。
增加d的限制
当 d>λ/2,阵元间最大相位差将会落在区间 [-π,π] 之外,结 果造成相位差测量模糊,致使位置解算发生错误。因此, d 必 须≤λ/2。
17
2018/10/6
3.5 改善超短基线定位系统 定位精度的措施
1.522
1.0417
0.8103
0.6799
0.6014
0.5543
x (m)
21.0
21.4
22.4
24.7
15
28.5
34.0
45.0
65.9
2018/10/6
3.4 超短基线定位系统定位误差分析
误差与θ
m
的变化关系
“跳象限”问题 “跳象限”的现象:随θ m的减小,
定位精度难以保证 存在水面反射,使直达声和反射声相加之后总和信号的相位 发生变化。结果,使得计算的不正确。例如,信标本应在第I 象限,而计算结果可能是X、Y均为负值,误为第IV象限。结 果,使载体相对于信标的位置轨迹不连续。这就是所谓的 “跳象限”现象。
c T 12 d 2 c T d 12
12 2018/10/6
在各项误差认为互相独立的情况下,相对于斜距 2 2 的位置均方误差记为, X X / R2 即
12 2 X 2d
2
X a X a 12 c T 12 d cos mx 2 3.4 超短基线定位系统定位误差分析 R Xa 2d c T 12 d
c 2 T 2 d 2 2 2 2 12 c T d 2 d
2 2 总的均方误差 类似地,可得到 x y
13 2 Y 2d
水下定位与导航技术
第三章 超短基线水声定 位系统
2018/10/6
1
3.1 引言
组成结构:
发射换能器和几个水听器可以组成一个直径只有 几厘米~几十厘米的水听器基阵,称为声头。 声头可以安装在船体的底部,也可以悬挂于小型 水面船的一侧。
超短基线系统定位解算方式