汽车惯导算法
惯导导航算法原理
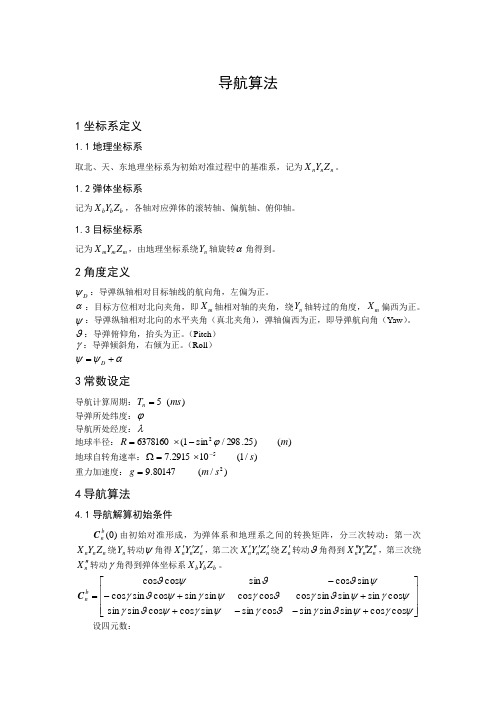
导航算法 1坐标系定义 1.1地理坐标系 取北、天、东地理坐标系为初始对准过程中的基准系,记为nnnZYX。 1.2弹体坐标系 记为bbbZYX,各轴对应弹体的滚转轴、偏航轴、俯仰轴。 1.3目标坐标系 记为mmmZYX,由地理坐标系绕nY轴旋转角得到。 2角度定义
D:导弹纵轴相对目标轴线的航向角,左偏为正。
:目标方位相对北向夹角,即mX轴相对轴的夹角,绕nY轴转过的角度,mX偏西为正。
:导弹纵轴相对北向的水平夹角(真北夹角),弹轴偏西为正,即导弹航向角(Yaw)。
:导弹俯仰角,抬头为正。(Pitch)
:导弹倾斜角,右倾为正。(Roll)
D
3常数设定
导航计算周期:)(5msTn 导弹所处纬度: 导航所处经度: 地球半径:)()25.298/sin1(63781602mR 地球自转角速率:)/1(102915.75s 重力加速度:)/(80147.92smg
4导航算法 4.1导航解算初始条件 )0(bnC由初始对准形成,为弹体系和地理系之间的转换矩阵,分三次转动:第一次
nnnZYX绕nY转动角得nnnZYX,第二次nnnZYX绕nZ转动角得到nnnZYX,第三次绕
nX转动角得到弹体坐标系bbbZYX。
coscossinsinsincossinsincoscossinsincossinsinsincoscoscossinsincossincossincossincoscosbnC
设四元数: Tqqqq][3210Q
)0()0()0(1))0()0((21)0()0()0()0(1))0()0((21)0()0()0()0(1))0()0((21)0()0()0()0(121)0(3322112112333221113312332211322313322110TTTTTsignqTTTTTsignqTTTTTsignqTTTq
智能车辆惯性导航模块方案
智能车辆惯性导航模块方案一、简介随着社会的不断发展,智能车辆技术的不断发展,惯性导航系统越来越被广泛地应用于各种车辆的导航系统中。
智能车辆惯性导航系统是一种可以利用车辆惯性传感器和GPS信息等信号来实现车辆定位的技术。
同时,也可以实现车辆行驶过程中的数据记录或车况检测等功能。
本文将会主要介绍智能车辆惯性导航模块的方案设计,包括车辆惯性传感器、GPS模块、计算机控制单元等方面的设计,旨在提高车辆导航系统的效率和精度。
二、设计1. 车辆惯性传感器的选择车辆惯性传感器在智能车辆惯性导航系统中起到了至关重要的作用。
它可以通过感测汽车在行驶时的加速度来计算出车辆的行驶轨迹。
目前市面上的车辆惯性传感器有很多种,其中代表性的有MEMS微机电传感器和FOG(Fiber Optic Gyroscope)光纤陀螺仪传感器。
MEMS微机电传感器由于体积小、性能好并且价格适中,大规模应用于商用车辆上。
2. GPS模块的选择GPS模块也是智能车辆惯性导航系统中的重要组成部分。
GPS模块可以获取车辆实时的位置信息和方向信息。
目前市面上的GPS模块有很多种,其中高精度的GPS模块可以提供比其它低精度模块更优越的性能。
3. 计算机控制单元的设计计算机控制单元是智能车辆惯性导航系统中的核心部分。
计算机控制单元可以对车辆惯性传感器和GPS模块采集到的数据进行处理和分析,并将分析结果以动态连通的方式呈现在车载终端上,以供车主参考。
三、实现实现智能车辆惯性导航系统的过程,可以按照以下步骤进行操作:1.从市场上购买MEMS微机电传感器和GPS模块,并合理地安装到汽车上。
2.编写相应的程序,以获取并处理车辆惯性传感器和GPS模块读取到的数据。
3.进行各项参数的校正和定位,以确保得出的位置准确可靠。
4.将处理结果以可视化的形式呈现在车载终端上。
四、结论智能车辆惯性导航系统是一种可以利用车辆惯性传感器和GPS信息等信号来实现车辆定位的技术。
它能够提高车辆导航系统的效率和精度。
基于惯性导航测试下的车辆循迹优化处理方法

基于惯性导航测试下的车辆循迹优化处理方法发布时间:2023-01-31T08:46:32.017Z 来源:《中国科技信息》2022年9月18期作者:王紫涵1,邓荣伟1,刘伯通1[导读] 通过计算GPS两点经纬度角度偏差,以及经典PID算法控制舵机打脚PWM的输出王紫涵1,邓荣伟1,刘伯通11.湖北汽车工业学院汽车工程学院,湖北十堰 442002摘要:通过计算GPS两点经纬度角度偏差,以及经典PID算法控制舵机打脚PWM的输出,实现样本根据GPS偏差转弯。
惯性导航辅助优化,根据上位机采集车身行驶姿态,及时改变参数调整样本前进姿态,修正由外部或硬件原因而导致的轨迹误差,帮助样本更快更稳地抵达正确终点。
使用IAR软件,完成程序编写任务,最终搭建GPS和惯性导航相融合的循迹方法,证明了惯性导航测试下的车辆循迹优化处理方法的有效性和正确性关键词:GPS导航系统,惯性导航,卡尔曼滤波引言:GPS与惯性导航组合成一个系统的主要目的就是为了提高导航的精度和可靠性能,这种组合的方式,克服了各自的缺点,取长补短,使综合后的导航精度高于两个系统单独工作的精度,实现了在高动态和强干扰的复杂环境下实时、高精度的导航定位,是一种比较完善的导航系统。
1.GPS导航系统实现路线规划简介GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置,采用串口中断采集GPS经纬度和方位角,中断每间隔100ms对GPS经度和方位进行一次采集。
并将GPS的经纬度存入flash中,保证断电后,仍然可以使用经纬度,不用重新采点。
在寻迹过程中,主要是通过GPS得到方位角,然后通过两点之间的方位角和当前方位角的差值得到误差,通过分段PD对舵机的打角,实现控制。
由于GPS的刷新速率比较慢,在短时间内的方位角差值可能变化比较剧烈,可以通过陀螺仪对一段时间的方位角进行积分,然后积分的差值作为分段PD的误差输入,从而控制舵机的打角,这样在高速的情况下舵机打角可以比较平缓。
惯导和里程计组合

惯导和里程计组合
惯导与里程计组合(Inertial Navigation System and Odometry Fusion)是一种常用的导航技术,通过将惯性导航系统(Inertial Navigation System,简称INS)和里程计(Odometry)数据进行融合来提高导航的精度和稳定性。
惯性导航系统是一种基于惯性传感器(如加速度计和陀螺仪)的导航系统,它可以测量和跟踪物体在空间中的加速度和角速度。
由于惯性传感器本身没有参考物体,因此在长时间使用后可能会出现漂移,导致导航误差逐渐累积。
里程计是一种通过测量轮子或足部传感器的旋转次数和运动方向来估计物体位移的方法。
里程计可以提供实时的位移信息,但由于轮子滑动、地面不平整等原因,里程计数据也可能存在误差。
惯导和里程计组合的核心思想是将惯导和里程计的数据进行融合,利用彼此的优点来互相补充和校正。
惯导提供了高频率的角速度和加速度信息,可以提供精确的姿态和速度估计。
里程计则提供了低频率的位移信息,可以通过积分得到相对于起始位置的位置估计。
在融合过程中,通过使用滤波算法(如卡尔曼滤波器)将惯导和里程计的数据进行融合,将它们的优点结合起来,减小误差和漂移。
惯导数据可以用来校正里程计的误差,并修正导航系统的姿态和速度估计。
里程计数据则可以用来校正惯导的
漂移,并提供位置估计。
通过惯导和里程计的组合,可以使导航系统在长时间和复杂环境中保持较高的精度和稳定性,对于需要实时位置和姿态信息的应用,如无人驾驶车辆、航空航天器、机器人等具有重要意义。
东营车辆惯性导航模块方案

东营车辆惯性导航模块方案摘要车辆惯性导航在汽车行业应用愈发广泛,为消费者提供更高性价比的导航选择,成为必要趋势之一。
本文旨在讨论东营车辆惯性导航模块方案,介绍其技术原理以及应用场景,并分析其发展前景。
技术原理东营车辆惯性导航模块采用了MEMS技术,实现了车辆惯性测量单元、地磁测量单元、GPS接收机等驱动基础设备的集成化设计。
其主要原理如下:•惯性测量单元:通过加速度计、陀螺仪等传感器实现了车辆的线性加速度、角速度测量等功能。
•地磁测量单元:通过磁力计等传感器实现车辆姿态角测量,进而确定车辆方向。
•GPS接收机:通过接收卫星信号实现车辆的位置测量功能。
综上,通过这三个单元共同作用,实现东营车辆惯性导航模块的位置、速度和姿态的测量,从而提供高精度的导航解决方案。
应用场景东营车辆惯性导航模块广泛应用于汽车、轮船、飞机等控制领域,尤其是在卫星信号覆盖较差的区域,可以较好地保持导航良好性能。
同时,由于其精度较高、成本较低等特点,以及支持多种通信协议,也应用于车联网、自动驾驶等新兴领域,成为未来技术发展的有力助推。
发展前景随着市场对车辆导航定位服务需求不断增加,以及自动驾驶技术的不断革新,东营车辆惯性导航模块市场前景看好,具有广泛应用前景。
未来,预计随着技术的不断升级,东营车辆惯性导航模块将会变得更为智能化,为用户提供更为便捷、安全的驾驶服务,推动汽车行业的发展。
结论东营车辆惯性导航模块方案是目前应用较为广泛的一种导航解决方案,其技术原理简单、实用性高、发展前景值得期待,具有较大的市场潜力。
在未来,随着技术的不断完善和新功能的不断开发,东营车辆惯性导航模块有望成为未来智能交通的重要组成部分。
惯导对准算法
惯导对准算法惯导对准算法是一种常用于导航和定位系统中的算法,它可以通过对传感器数据进行处理,实现对目标位置的准确控制。
本文将介绍惯导对准算法的原理、应用以及优缺点。
一、原理惯导对准算法主要基于惯性导航原理,利用陀螺仪和加速度计等传感器获取对象的加速度和角速度信息,通过数学模型和运动方程推导出位置、速度和姿态等参数。
惯导对准算法的核心思想是将传感器测量值与预测值进行比较,通过调整参数来减小误差,从而实现对目标位置的准确控制。
二、应用惯导对准算法广泛应用于航空航天、导航和定位系统中。
在航空航天领域,惯导对准算法可以实现飞行器的自主导航和定位,提高飞行精度和安全性。
在导航系统中,惯导对准算法可以用于车辆、船舶等移动设备的定位和导航,提供准确的位置信息。
此外,惯导对准算法还可以用于虚拟现实、游戏和运动追踪等领域。
三、优缺点惯导对准算法具有以下优点:1. 高精度:通过对传感器数据的精确处理和模型推导,可以实现对目标位置的高精度控制。
2. 实时性:惯导对准算法可以实时获取传感器数据并进行处理,响应速度快。
3. 独立性:惯导对准算法不依赖于其他外部设备或信号,适用于各种环境和场景。
然而,惯导对准算法也存在一些缺点:1. 累积误差:由于传感器本身的不准确性和测量误差的累积,惯导对准算法在长时间使用后误差会逐渐增大。
2. 对初始条件敏感:惯导对准算法的精度受初始条件的影响较大,需要进行准确的初始对准操作。
3. 受干扰影响:惯导对准算法容易受到外部干扰的影响,例如震动、颠簸等,导致测量结果不准确。
四、总结惯导对准算法是一种常用于导航和定位系统中的算法,通过对传感器数据进行处理,实现对目标位置的准确控制。
它具有高精度、实时性和独立性等优点,但也存在累积误差、对初始条件敏感和受干扰影响等缺点。
在实际应用中,我们可以根据具体需求和场景选择合适的惯导对准算法,并结合其他定位技术进行优化和改进,以提高导航和定位的准确性和稳定性。
惯导的工作原理

惯导的工作原理
惯导的工作原理
惯导(Inertial guidance)是一种具有高度自主性、安全性和
可靠性的导引系统,它不需要外部信号,就可以满足对航行器姿态控制和位置定位的要求。
它一般分为外推惯导和内置惯导两种。
外推惯导通常由一个或多个传感器(如指南针、加速度计和陀螺仪)以及由它们提供信息的处理装置组成,其结构简单,但有一定的误差。
内部惯导可以有效的补偿外推惯导的误差,不受外界辐射的干扰,因此,更为可靠。
它通常由计算机、观测机械、控制算法和运动控制等系统组成。
在外推惯导中,传感器负责探测外界的物理量,包括航行器的速度、转向、加速度等,然后将这些信息传递给处理装置,处理装置再将这些信息处理,用来评估航行器的姿态和位置。
在内部惯导中,计算机负责控制运动,观测机械负责测量航行器的运动状态,控制算法负责运动状态的纠正,运动控制负责实际控制运动。
总之,惯导系统是一个复杂而功能强大的系统,它具有高度自主性、安全性、可靠性和苛刻的环境限制等优点,广泛用于飞行器、船舶、汽车等运动控制和定位应用领域。
- 1 -。
基于地图匹配的车载惯导行进间精对准算法
基于地图匹配的车载惯导行进间精对准算法
基于地图匹配的车载惯导行进间精对准算法
李欣; 赵海波; 马士国
【期刊名称】《导航与控制》
【年(卷),期】2020(019)002
【摘要】针对车载惯性导航系统快速初始对准问题,以相似性原理为基础,提出了基于地图匹配辅助的车载惯导行进间精对准算法.首先,该算法研究并改进了基于移动相关的最小二乘地图匹配算法,通过跑车实验验证了改进的匹配算法的应用能够获得高精度的位置点群.然后以相似性原理为基础,提出了以地图匹配结果作为虚拟路标点的车载惯导系统行进间迭代精对准算法,从而摆脱对预置路标点的依赖.仿真结果表明,该算法能够获得与基于预置路标点的行进间对准算法精度相当的对准结果.
【总页数】7页(52-58)
【关键词】组合导航; 地图匹配; 行进间精对准; 相似性原理; 最小二乘法
【作者】李欣; 赵海波; 马士国
【作者单位】海军研究院空中所上海200436; 中国人民解放军91445部队大连116043
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.自主式车载捷联惯导行进间对准方案设计 [J],
2.一种里程计辅助车载捷联惯导行进间对准方法 [J],
3.基于激光多普勒测速仪的车载捷联惯导系统行进间快速对准方法研究 [J],。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车惯导算法
汽车惯性导航算法是一种利用车辆自身的惯性传感器来进行导航定位的技术。
它可以通过测量车辆的加速度和转角等信息,推算出车辆的位置、速度和方向等关键信息,为车辆驾驶员提供准确的导航指引。
汽车惯性导航算法主要依赖于车辆上的惯性传感器,包括加速度计、陀螺仪和磁力计等。
加速度计可以测量车辆的加速度,陀螺仪可以测量车辆的转角速度,磁力计可以测量车辆的方向。
通过对这些传感器的数据进行处理和融合,就可以得到车辆的准确位置和方向。
在汽车惯性导航算法中,最常用的方法是卡尔曼滤波器。
卡尔曼滤波器是一种递归的状态估计器,能够根据车辆的动态模型和传感器的测量数据,通过迭代计算得到车辆的最优估计值。
它能够有效地处理传感器的噪声和不确定性,提高定位的精度和稳定性。
除了卡尔曼滤波器,还有其他一些常用的惯性导航算法,如粒子滤波器和扩展卡尔曼滤波器等。
这些算法在不同的应用场景中具有各自的优势和限制,可以根据具体的需求选择合适的算法。
汽车惯性导航算法在车辆导航和自动驾驶等领域具有广泛的应用前景。
它可以实现车辆的精确定位和导航功能,为驾驶员提供准确的导航指引,提高驾驶安全性和舒适性。
同时,它也是实现自动驾驶的关键技术之一,可以为自动驾驶系统提供准确的位置和方向信息,
实现车辆的自主导航和路径规划。
然而,汽车惯性导航算法也存在一些挑战和限制。
首先,惯性传感器的精度和稳定性对定位的精度和稳定性有很大影响,需要选择高性能的传感器和进行精确的校准。
其次,惯性导航算法对车辆的动态特性要求较高,需要建立准确的车辆动态模型,并考虑车辆的加速度、转角和速度等因素。
此外,惯性导航算法还需要考虑地图数据和GPS数据等外部信息,进行数据融合和校正,以提高导航的精度和可靠性。
汽车惯性导航算法是一种利用车辆自身的惯性传感器来进行导航定位的技术。
它通过测量车辆的加速度和转角等信息,推算出车辆的位置、速度和方向等关键信息,为车辆驾驶员提供准确的导航指引。
汽车惯性导航算法在车辆导航和自动驾驶等领域具有广泛的应用前景,但也面临着传感器精度、动态建模和数据融合等挑战。
未来随着技术的不断进步和研究的深入,汽车惯性导航算法有望实现更高精度和更可靠的定位和导航功能,为车辆驾驶和自动驾驶带来更多便利和安全。