汽车倒车雷达系统的设计与实现_吴琼
毕业设计之倒车雷达
word摘要倒车雷达是汽车泊车或者倒车时的安全辅助装置。
该系统能够在汽车低速倒车的过程中,识别出车体后部的障碍物,并能够测量汽车与障碍物之间的距离。
在车辆与障碍物发生碰撞之前,发出语音警报,提醒司机刹车。
针对汽车行业中倒车雷达现状,本文提出了一种以ARM9处理器ARM920T 和Linux操作系统为软硬件平台的数据采集方案、超声波发射接收装置、语音报警模块等多模块设计,完成了对倒车系统复杂情况的判断、测距、语音报警等功能。
从测试的准确行,可观性、稳定性上对可视倒车雷达系统的组成取得了新的突破。
本系统采用超声波换能器产生超声波,当超声波碰到障碍物后因阻挡而被反射,系统通过CSB40R接收,然后通过超声波的发射和接收之间的时间差而测出距离;通过语音报警系统通知司机具体的距离与危险程度。
该系统的有效运用可使我们更好的防止交通事故,有效的利用高端科技为日常生活服务。
关键词:嵌入式系统; 超声波;ARM9;Linux操作系统;语音报警AbstractWith the development of the technology of the electronic,auto,embed and information inrecent years,the embed system has been widely applied in each field.Thanks to the progress ofthe puter,munication and automation,especially the improvement of the embedtechnology,selecting a embed operating system will be a very effective thing that will improvethe capability and the empolder rate,which will supply a support platform for the modernizationand informatization of the industry.In connectionwith the current situation of reversing radar,the paper puts forward a designof modules which is based on ARM9 processor named ARM920T and the Linux control system,which has all the functions including:ultrasonicsend/incept module,alarm module of sound etc.The system call plete the functions ofjudgement,measure distance,audio alert and so on.The reversing radar breaksthrough in terms of veracity,observability,stability.In order to produce the ultrasound the system adopts the device of ultrasonic transducerwhich has the feature of echoing when the ultrasonic touching the barrier.The reflected wavewill be taken over by CSB40R,then ARM can test the time from sending to receiving,fromwhich the controller call measure the distance from barrier to car.According to the judgement the controller can also alarm the driver of the distance from the barrier to the car withthe dangerous circumstances.If the controller system is used effectively,it can better serve ourdaly life,for example it carl reduce the traffic accidents drastically.The practicability and the actualization are emphasized in the research course.With respectto hardwares,we choose the mon ones.And we also have done much work in improving andverifying the gordian technique.The practical results show that the reversing radar system withaccuracy test anddependable performance will play an important role in reversing withoutbarrier.Keywords:Embedded System;ultrasonic;ARM9;Linux OS;Audio Alert目录1 绪论11和意义21.3 倒车雷达的开展现状和趋势21.3.1 倒车雷达的开展现状22 倒车雷达系统总体设计和关键技术42.1倒车雷达系统的设计思想和目标 (4)2.2 倒车雷达系统的结构52.3 倒车雷达系统的关键技术62.3.1 超声波测距技术62.3.2 嵌入式系统82.3.3 Linux操作系统113 倒车雷达系统硬件电路的设计与实现123.1 倒车雷达系统硬件总体设计123.2 倒车雷达系统的硬件具体实现133.2.1 核心板133.2.2 核心板的电源电路图173.2.3 时钟电路与复位电路设计183.2.4 超声波发生电路193.2.5 超声波接收电路213.2.6 语音报警系统电路243.3 硬件系统的PCB板的设计原如此 (26)4软件设计与调试274.1 嵌入式Linux系统软件开发要经过5个步骤 (27)编译和移植Boot loader274.1.3 移植置裁剪Linux内核驱动程序的编写添加284.1.4 文件系统(Ramdisk)的安装294.1.5 用户空间(User)程序的开发294.2 系统软件总体设计思路 (30)Linux的USB驱动程序 (31)4.3.1 驱动程序支持的设备324.3.2 注册USB驱动程序324.3.3 探测与断开334.3.4 提交和控制urb354.3.5 驱动模块的编译、配置和使用374.4 超声波发射和接收局部的软件 (37)5 总结与展望405.1 系统的工程实践405.2 系统的创新点405.3 课题展望41参考文献42致谢441 绪论随着电子技术和嵌入式技术、汽车工业的飞速开展,汽车工业自动化、信息化水平的不断提高。
汽车倒车雷达系统工作原理
汽车倒车雷达系统工作原理
汽车倒车雷达系统是一种智能化的辅助驾驶设备,它的主要作用
是在驾驶过程中,检测后方的障碍物和距离,并提示驾驶员。
汽车倒车雷达系统的工作原理如下:它通过车身后方的探头,向
后发出无线电磁波。
当这些波遇到后方的物体时,会产生回波并返回
到探头,通过探头将这些回波转化为电信号。
该系统接收到这些信号后,将信号处理并转化为数字信号,然后
通过中央处理器进行分析和计算,最终将计算出的结果显示在驾驶员
仪表盘或车载显示屏上。
常见的提示方式有声音提示和图像提示两种
方式。
当探测到后方有障碍物时,系统会用不同的信号声音提示驾驶员,有时还会显示图像,具体提示形式因不同车型和配置有所不同。
同时,障碍物离车辆越近,声音提示会越急促,以提醒驾驶员注意及时避让。
汽车倒车雷达系统是一种非常实用的车辆辅助设备,尤其是在倒
车时更为重要。
驾驶员应当注意,这一辅助设备无法完全替代人眼观察,仍需要人为的观察和判断。
安装和使用倒车雷达系统需要注意许多细节。
其中最重要的是定
期清洁探头,不要使用尖锐物体或者尖锐涂料直接清洁探头,避免影
响探头的检测能力。
同时,在使用过程中也要避免擦碰探头,以免受损,影响其准确性。
总之,安装倒车雷达系统可以让驾驶更为安全和便捷,但也需要认真安装使用和维护,避免不必要的损失。
毕业设计之倒车雷达
随着汽车的迅速增加,停车难已经是不争的事实,狭小的停车场地常常令有车一族无所适从,稍不慎,则闯祸,烦事又烦人。虽然每辆车都有后视镜,但不可避免的都存在一个后视盲区。汽车倒车防撞预警系统即俗称的倒车雷达,是汽车泊车时的辅助装置。在汽车倒车时,倒车雷达采用超声波测距原理探测汽车尾部离障碍物的距离,当汽车尾部离障碍物的距离达到探测范围时,倒车雷达通过数码管实时动态显示距离。当汽车尾部离障碍物的距离达到设定的安全警告值时,倒车雷达发出报警声,以警示驾驶员,辅助驾驶员安全倒车。
近两年来,倒车雷达成了商家的电子新宠,众多生产防盗器的厂家纷纷涉足倒车雷达。随着信息化、智能化、网络化的发展,嵌入式系统技术获得广阔的发展空间,工业控制领域也进行着一场巨大的变革,以32位高端处理器为平台的实时嵌入式软硬件技术将应用在工业控制的各个角落。嵌入控制器因其体积小、可靠性高、功能强、灵活方便等许多优点,其应用已深入到工业、农业、教育、国防、科研以及日常生活等各个领域,对各行各业的技术改造、产品更新换代、加速自动化进程、提高生产率等方面起到了极其重要的推动作用。
该系统能够在汽车以较低的速度进行倒车的过程中,识别出车后部的障碍物,并能够测量车与障碍物之间的距离,在车辆与障碍物发生碰撞前,发出声光报警。在车辆上安装一个对障碍物进行监测预警的系统,就能用声音和数码管实时动态显示的距离告知驾驶员周围障碍物的情况,解除驾驶员泊车和启动车辆时前后、左右探视所引起的困扰。同时帮助驾驶员扫除视野的死角和视线模糊的缺陷,驾驶员只需坐在驾驶室就能观察到车前车后的详细情况,做到心中有数,极大的提高了泊车和倒车时的安全和效率。也能让驾驶员在危险时刻到来前及时采取有效措施,减少事故发生,保障人身和财产安全。
摘要
倒车雷达是汽车泊车或者倒车时的安全辅助装置。该系统能够在汽车低速倒车的过程中,识别出车体后部的障碍物,并能够测量汽车与障碍物之间的距离。在车辆与障碍物发生碰撞之前,发出语音警报,提醒司机刹车。
基于单片机的倒车雷达系统的设计与实现

基于单片机的倒车雷达系统的设计与实现严敏【摘要】设计一种以单片机STC89C52为控制核心的倒车雷达系统,以避免汽车在倒车或停车时发生的碰撞问题。
系统通过按键设置报警距离,通过LED数码管显示汽车与障碍物之间的距离,当其小于报警距离时,通过报警电路进行安全提示。
首先使用Proteus和Keil进行仿真联合调试,然后进行实验验证,实验结果表明倒车雷达系统在20~400 cm内可实现准确测距,具有外围电路简单、可靠性高、实用性强等优点。
%A reversing radar system is designed based on MCU STC89C52 to avoid collision in car backing or parking. It is equipped with three buttons to set the alarm distance and a LED digital displayer to tell the distance between the car and the obstacles. When the car is within the alarm distance,the alarm circuit will give out warning signals. Proteus and Keil are first introduced to simulation test and then real test. The testing results show that the reversing radar system is precise in measuring distance within 20 to 400 cm and it enjoys such advantages as simple peripheral circuit,higher reliability and practicability,and the like.【期刊名称】《苏州市职业大学学报》【年(卷),期】2016(027)003【总页数】5页(P25-29)【关键词】单片机;超声波;HC-SR04;倒车雷达【作者】严敏【作者单位】江苏联合职业技术学院扬州商务分院信息电子系,江苏扬州225127【正文语种】中文【中图分类】TP277随着人们生活质量的逐步提升,汽车已成为很多家庭必不可少的出行交通工具.在人们享受汽车带来便利生活的同时,因倒车而引发的碰撞问题日益突显.近年来,倒车雷达系统成为的热点研究课题.倒车雷达是汽车倒车或者停车时的安全辅助装置,采用超声波测距技术,以声音或图像提醒驾驶员汽车后方障碍物的情况,扫除视线死角,提高行车安全性[1-5].本文设计一种以单片机STC89C52为控制核心的倒车雷达系统,以避免汽车在倒车或停车时发生的碰撞问题.系统通过按键设置报警距离,通过LED数码管显示汽车与障碍物之间的距离,当其小于报警距离时,通过报警电路进行安全提示,首先使用Proteus和Keil进行仿真联合调试,然后进行实验验证.本系统采用超声波渡越时间法测距[6-7],利用单片机驱动超声波发射器发射超声波的同时启动定时器开始计时,当超声波接收器检测到回波即停止计时.定时器记录的超声波从发射到返回的时间差t乘以声速C就可以得到声波传输距离,而所测距离S为声波传输距离的一半,即S=Ct/2.其中,声速C与温度有关,如果空气温度变化不大,则可认为声速是基本不变的,通常情况下,超声波声速为340 m/s.其测距原理框图如图1所示.2.1 设计总体结构以单片机STC89C52为控制核心,设计一种倒车雷达系统,其硬件部分主要由单片机主控器模块、超声波测距模块、按键设置模块、LED数码显示模块、蜂鸣器报警模块组成,系统结构框图如图2所示.其中,超声波测距模块采用HC-SR04,模块包括超声波发射器、超声波接收器和控制电路,测距范围为20~400 cm,测距精度可高达3 mm.三个按键用来设定和更改报警距离,分别为设置键、加键、减键,只有按下设置键才可以进行加、减操作.LED数码管用来显示汽车与障碍物之间的距离,当其小于报警距离时蜂鸣器进行报警提示.2.2 HC-SR04超声波测距模块2.2.1 HC-SR04接口如图3所示,HC-SR04有四根线,VCC提供5 V电源,GND为地线,TRIG为触发控制信号输入端,ECHO为回响接收信号输出端.2.2.2 HC-SR04超声波时序图HC-SR04超声波时序图如图4所示,单片机的I/O口接TRIG端口提供至少10 µs 的脉冲触发信号,模块内部自动发出8个40 kHz的方波并自动检测回波,一旦检测到有回波则通过ECHO端口输出回响信号,高电平持续的时间就是超声波从发射到返回的时间[8],由此可以计算得到所测距离=(高电平时间×声速)/2.软件程序主要完成报警距离的设置及汽车与障碍物之间距离的测量、计算及显示等功能,采用模块化设计思路,包括初始化子程序、LED数码管显示子程序设计、按键扫描子程序设计、距离计算子程序设计、定时器子程序等,系统程序流程如图5所示.3.1 距离计算子程序设计3.2 LED数码管显示子程序设计在编程时,LED数码管要显示哪个数字或字符,只需写入相应的字段码,利用循环扫描的方式,分时轮流选通各个LED数码管,当扫描速度达到一定程度时,由于人眼的视觉暂留效应,感觉所有LED数码管同时点亮.其部分代码设计为3.3 按键扫描子程序设计当有键按下时,首先确定键值,再进行相关处理,其部分代码设计为使用Proteus和Keil联合调试,可以得到倒车雷达系统仿真结果,如图6所示,LED数码管实时动态显示汽车与障碍物之间的距离,当前为153 cm.如果汽车离障碍物较远,超出测量范围,LED显示管如图7所示.由于Proteus单片机仿真软件中没有超声波模块,本系统使用单片机软件程序来模拟,超声波模块的两个按键实际设计中并没有,只是在仿真时用来调节汽车与障碍物的远近.此时,如果按下设置键K1,可以重新设置报警距离,为了区分报警距离和汽车与障碍物之间的距离,LED数码管在显示汽车与障碍物之间的距离时,其第一个数码管不显示,而在显示报警距离时,其第一个数码管显示字母H,如图8所示,当前报警距离为85 cm;如果继续按下加键K2,LED数码管显示如图9所示;如果按下减键K3,LED数码管显示如图10所示,报警距离设置完毕,再次按下K1键,LED数码管显示汽车与障碍物之间的距离,如果其小于报警距离,则蜂鸣器报警,可见仿真满足设计要求.仿真成功后再制作实物倒车雷达系统,各个元器件焊接调试完毕,加载程序,系统实验结果如图11所示,LED数码管实时动态显示当前物体与障碍物之间的距离,如果其小于报警距离,则蜂鸣器响,通过按键可以重新设置报警距离,反复测试,系统满足设计要求.从仿真和实验结果可以看出,以单片机STC89C52为主控器,采用超声波测距模块HC-SR04的倒车雷达系统能有效避免汽车在倒车或停车时发生的碰撞问题,提高行车安全性.实验结果表明倒车雷达系统在20~400 cm内可实现准确测距,测距精度可高达3 mm,具有外围电路简单、可靠性高、实用性强等优点.【相关文献】[1]韦穗林. 基于单片机的倒车防撞预警系统设计和实现[J]. 现代电子技术,2009(21):160-163.[2]林志盛,熊柳,邓曦平,等. 倒车雷达预警系统的设计和实现[J]. 实验科学与技术,2013(3):176-179.[3]芮长颖. 基于AT89C52单片机的汽车倒车雷达系统设计[J]. 信息化研究,2012(3):42-44.[4]王桔,云连鹏. 车载安全防范终端的设计与开发[J]. 长春大学学报(自然科学版),2011,21(12):18-20.[5]李荃高. 基于单片机的时区时钟设计[J]. 苏州市职业大学学报,2015,26(2):29-31. [6]高旭,朱军. 基于AT89S52单片机的超声波倒车雷达系统的设计[J]. 电子技术,2010(1):60-61.[7]杨成慧,滕帅,罗楠. 一种汽车倒车防撞系统设计[J]. 西北民族大学学报(自然科学版),2014,35(4):7-13.[8]苏巧平,刘原,纪利琴. 基于1760语音模块的汽车倒车防撞语音提示系统设计[J]. 宝鸡文理学院学报(自然科学版),2013,35(2):50-52.。
传感器课程设计--汽车倒车防撞雷达系统设计
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
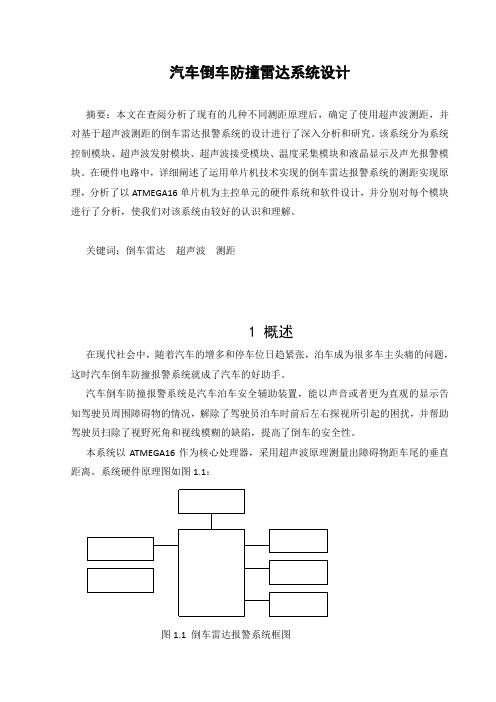
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。
倒车雷达毕业设计

倒车雷达毕业设计【篇一:基于单片机得倒车雷达设计毕业论文】1 绪论1.1 课题背景随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来的许多麻烦,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员后顾之忧,大大降低倒车事故的发生。
超声波倒车雷达全称叫“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和启动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野的死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发生超声波,然后通过反射回来的超声波判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。
1.2 国内外研究现状一般认为,关于超声波的研究最初起始于1876年f.galton的气哨实验,这是人类首次有效产生的高频声波。
在之后的三十年中,超声波仍然是一个鲜为人知的东西,由于当时电子技术发展缓慢,对超声波的研究造成了一定程度的影响。
在第一次世界大战中,对超声波的研究逐渐受到重视。
法国人langevin使用一种晶体传感器在水下发射和接收相对低频的超声波。
他提出的这种方法可以用来检测水中是否存在潜艇并进行水下通信。
1929年,sokolov首先提出用超声波探查金属物内部缺陷的建议。
相隔2年,1931年mulhauser获准一项关于超声检测方法的德国专利,不过他并未做更多的工作。
倒车雷达系统

图2-1 倒车雷达系统总框图
该设计的应用背景是基于AT89C51的超声信号检测的。因此初步计划实在室内小范围的测试,限定在2.5米左右。单片机(AT89C51)发出短暂的40KHz信号,反射后的超声波经超声波接收器作为系统的输入,锁相环对此型号进行技术判断后,把相应的计算结果送到LED显示电路显示,并进行声光报警[1]。
3.2 超声波检测接收电路.................................................18
3.3 超声波显示及控制部分电路...........................................21
3.4 报警电路...........................................................28
其发射电路通常分为调谐式和非调谐式。在调谐式电路中有调谐线圈(有时装在探头内),谐振频率有调谐电路的电感、电容决定,发射的超声脉冲频带较窄。在非调谐式电路中没有调谐元件,发射出的超声频率主要由压电晶片的固定参数决定,频带较宽。将一定频率、隔度的交流电压加到发射传感器的固有频率40KHz,使其工作在谐振频率,达到最优的特性。发射电压从理论上说是越高越好,因为对同一支发射传感器而言,电压越高,发射的超声功率就越大,这样能够在接受传感器上接受的回波功率就比较大,对于接受电路的设计就相对简单一些。但是每一支实际的发生传感器有其工作电压的极限值,同时发射电路中的阻尼电阻决定了电路的阻尼情况。通常采用改变阻尼电阻的方法来改变发射强度。
倒车雷达系统
********
组长:
组员:
一、绪论..........................4
1.1本课题的研究背景和研究内容......................................4
倒车雷达系统课程设计

倒车雷达系统课程设计一、课程目标知识目标:1. 理解倒车雷达系统的基本组成、工作原理及其在汽车安全系统中的重要性。
2. 掌握倒车雷达系统中超声波传感器、信号处理单元和显示器的功能及相互关系。
3. 掌握倒车雷达系统的安装、调试及维护的基本知识。
技能目标:1. 能够运用所学的理论知识,分析倒车雷达系统在实际应用中的优缺点。
2. 能够通过小组合作,设计简单的倒车雷达系统模拟装置,并进行调试。
3. 能够运用倒车雷达系统相关知识,解决实际生活中的问题。
情感态度价值观目标:1. 培养学生对汽车安全技术的兴趣,激发他们学习科学技术的热情。
2. 增强学生的团队合作意识,培养他们在合作中解决问题的能力。
3. 提高学生的安全意识,使他们认识到倒车雷达系统在保障行车安全中的重要作用。
本课程针对高年级学生,结合学科特点,注重理论知识与实践操作相结合。
课程设计充分考虑学生的认知水平和兴趣,旨在提高学生的动手能力、创新意识和安全意识。
通过本课程的学习,学生能够掌握倒车雷达系统的基本知识,形成解决实际问题的能力,并在情感态度上得到积极引导。
二、教学内容1. 倒车雷达系统概述:介绍倒车雷达系统的发展历程、应用领域及其在汽车安全系统中的地位。
- 教材章节:第一章 汽车安全技术概述- 内容列举:倒车雷达系统的起源、发展、种类及功能。
2. 倒车雷达系统组成与原理:详细讲解超声波传感器、信号处理单元、显示器等组成部分及其工作原理。
- 教材章节:第二章 汽车倒车雷达系统- 内容列举:超声波传感器原理、信号处理方法、距离计算与显示。
3. 倒车雷达系统的安装与调试:介绍倒车雷达系统的安装位置、步骤及调试方法。
- 教材章节:第三章 倒车雷达系统的安装与调试- 内容列举:安装位置选择、步骤分解、调试技巧。
4. 倒车雷达系统的维护与故障排除:讲解倒车雷达系统的日常维护、常见故障及排除方法。
- 教材章节:第四章 倒车雷达系统的维护与故障排除- 内容列举:日常维护注意事项、常见故障现象及原因、排除方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车倒车雷达系统的设计与实现吴 琼,封维忠,马文杰(南京林业大学信息科学技术学院 江苏南京 210037)
摘 要:为避免汽车倒车过程中发生碰撞,设计一种基于单片机AT89C51的倒车雷达系统,介绍了超声波测距的基本原理,阐述了倒车雷达系统的结构组成、硬件电路设计以及软件设计,并在数据处理部分采用温度补偿消除温度对声速的影响,提高了测距精度。倒车距离采用LCD进行实时显示,并通过语音报警电路对不同距离段做出不同的语音提示。实验表明该倒车雷达系统在30~500cm范围内可实现准确测距,具有可靠性较高、外围电路简单、实用性强等优点。关键词:倒车雷达;超声波测距;AT89C51;LM1812;语音报警中图分类号:TP23 文献标识码:B 文章编号:10042373X(2009)092191204
DesignandImplementationoftheAutomobileReversingRadarSystemWUQiong,FENGWeizhong,MAWenjie(CollegeofInformationScienceandTechnology,NanjingForestryUniversity,Nanjing,210037,China)
Abstract:Inordertoavoidcollisionduringcarreversing,asystemofreversingradarsystembasedonAT89C51singlechipcomputerisdesigned.Basicprincipleofultrasonicrangingisintroduced.Detaileddescriptiononstructurecompositionofthesystemanddesignofhardwarecircuitandsoftwarearepresented.Temperaturecompensationisusedtoeliminatetheeffectoftemperatureonsoundvelocityandimprovetherangingprecision.Real2timedisplayofdistanceisrealizedwithLCDinthesys2temandalsovoicepromptisdifferentwhendistancechanged.Experimentalresultsshowsthatthemeasureddataisaccuratebetween30~500cm.Thereareseveraladditionaladvantagesoftheautomobilereversingradarsystem,suchashighreliabili2ty,simpleperipheralcircuit,practicalforuseandsoon.Keywords:reversingradar;ultrasonicranging;AT89C51;LM1812;voicealarming
收稿日期:2008210209
0 引 言随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有了私家车。在享受汽车给人们带来便利的同时,由于倒车而产生的问题也日益突出。据初步调查统计,15%的汽车事故是由汽车倒车“后视”不良造成的[1]。早期的倒车防撞仪可以测试车后一定距离范围的障碍物从而发出警报,后来发展到根据距离分段报警[2]。随着人们对汽车驾驶辅助系统易用性要求的提高,对汽车倒车雷达的要求也越来越高。本文设计的基于单片机AT89C51的倒车雷达,采用美国DAL2LAS半导体公司生产的DS18B20单总线型数字温度传感器进行温度补偿提高了测距精度,采用OC2MJ12232C3液晶显示模块对车距进行实时显示和ISD4004语音芯片实现了倒车雷达语音报警的功能,并可以根据距离的不同做出不同的语音提示。由于采用了超声波专用集成电路芯片LM1812,有效地提高了系统的可靠性和稳定性。1 超声波测距原理超声传感器是一种将其他形式的能转变为所需频率的超声能或是把超声能转变为同频率的其他形式的能的器件。超声波测距原理是利用单片机在超声波传感器发射超声波的同时单片机的T0计数器开始计数,
当检测到回波信号后单片机的T0计数器停止计数。测得的时间和声速相乘就可以得到超声波往返过程中走过的路程,所以所测距离S为声波传输距离的一半:
S=Ct/2式中:S为超声波发射点与被测障碍物之间的距离;C
为声波在介质中的传输速率;t为超声波发射到超声波返回的时间间隔。声波在空气中传输速率为:
C=C01+T/273(1)式中:T为绝对温度;C0=331145m/s。采用单片机脉冲计数的方法,可精确测出t的值。假设单片机的机器周期为T机,则有t=NT
机
[3],则测
得的距离为:
S=Ct/2=CNT机/2(2)191
《现代电子技术》2009年第9期总第296期 电子技术应用2 系统硬件电路设计2.1 系统结构系统框图如图1所示。该系统由单片机控制电路、超声波发射与接收电路、温度补偿电路、LCD显示电路以及语音报警电路等几部分组成。单片机AT89C51
是整个系统的核心部件,协调各部分电路的工作。单片机在超声波信号发射的同时开始计时,超声波信号在空气中传播遇到障碍物后发生反射,反射的回波信号经过处理后输入到单片机的INT0端产生中断,计数器停止计数。通过计数器测得的脉冲数可得到超声波信号往返所需要的时间,从而达到测距的目的。超声波探头选用TCF40225TR1型收发一体式超声波传感器,谐振频率为40kHz;超声发射与接收电路采用LM1812专业集成电路,不仅外围元件较少,电路简单,而且有更好的稳定性及可靠性;温度补偿电路采用一线制数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度对声速的影响[4];语音报警电路
采用ISD4004,可实现汽车倒车过程中的语音报警。
图1 汽车倒车雷达系统结构框图2.2 单片机控制电路系统控制部分的核心是ATMEL公司生产的AT89C51。AT89C51采用40引脚的双列直插式封装(DIP)形式,内部由CPU,4KB的ROM,256B的
RAM,2个16位的定时/计数器T0和T1,4个8位的I/O端口和一个全双工串行通信口等部分组成[5]。
AT89C51单片机具有系统结构简单,成本低,可靠性高,低功耗等特点。特别是内部集成了4KB的FLASH程序存储器,使单片机系统的结构更加简单,也使其得到了广泛的应用。同时,它还具有高级语言编程的特点,指令丰富,软件开发简单。AT89C51单片机是整个系统的核心部件,其作用是控制超声波专用集成芯片LM1812的发射和接收,对计时器的计数结果进行数据处理后送入LCD显示以及控制语音报警电路工作。2.3 超声波发射和接收电路本系统采用超声波专用集成电路LM1812作为超声波发射和接收电路的主控芯片。LM1812是一种通用型超声波收发器,主要用在各种各样的测距、定向和通信中。芯片包括一个脉冲调制C类发射器,一个高增益接收器,一个脉冲调制检测器及噪音抑制电路[6]。LM1812第1脚外接L1,C1决定了电路发送或接
收的工作频率,其工作频率为:
f0=1/(2πL1C1
)(3)
改变电感L1,电容C1的值可以改变振荡频率(本系统中f0为40kHz),最高可达325kHz。超声波发射和接收电路如图2所示。当LM1812
的8脚为高电平时,LM1812处于发射模式;当8脚为低电平时,LM1812处于接收模式[7]。值得注意的是,
单片机到LM1812的连接要进行5~12V的电平转换。当LM1812处于发射模式时,L1,C1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出。6,13脚之间所接变压器线圈的匝数比是根据TCF40225TR1型收发一体式超声波传感器的阻抗来确定的。实验证明,变压器线圈的匝数比大约为4∶1时可实现与超声波发送器阻抗相匹配。超声波接收器接收到的超声波信号经电容耦合由4脚输入,再经内部两级放大后同由1脚的谐振回路取出的信号一起送到检测器。当检测到超声波回波信号时,LM1812的14脚(与单片机的INT0端相连)变为低电平,使单片机的
T0计数器停止计数。
图2 超声波发射和接收电路2.4 温度补偿电路温度补偿电路采用了美国DALLAS半导体公司的DS18B20单总线型数字温度传感器。单总线即只用一根信号线来传输数据,而且数据传输是双向的,单总线具有“线与”功能,连接方便,便于扩展[8]。DS18B20
集温度测量、A/D转换于一体,具有体积小、动态范围宽、测量精度高等优点[9]。DS18B20和单片机接口电路如图3所示。DS18B20采用单总线方式和AT89C51单片机相连,即DS18B20的1脚接地,3脚接地,2脚接至AT89C51的P11引脚,同时将P11引脚采用一只417kΩ的电阻上
291
汽车电子吴 琼等:汽车倒车雷达系统的设计与实现