(完整版)逆变器中PI控制器分析
基于滤波电容电流补偿的并网逆变器控制(梁超辉 段善旭 刘邦银)
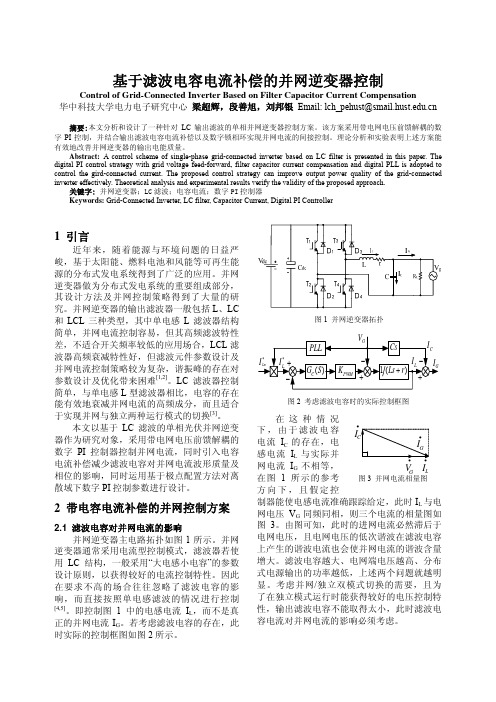
(b) 并网电流频谱分析 图 6 不带电容电流补偿的并网波形及频谱分析
且能有效地改善与输出滤波电容有关的并网电 流相位滞后和谐波含量增大的问题,提高并网 逆变系统的输出电能质量。
7 致谢
本课题研究得到台达环境与教育基金会电 力电子科教发展计划的资助(DREK200501), 特此致以诚挚的谢意!
参 考 文 献 [1]. R.Teodorescu, F Blaabjerg, U.Borup, M. Liserre. A New Control Structure for Grid-Connected LCL PV Inverters with Zero-Steady-State Error and Selective Harmonic Compensation[C]. IEEE APEC'04, 2004, 1: 580-586 [2]. Guoqiao Shen, Dehong Xu, Danji Xi, Xiaoming Yuan. An Improved Control Strategy for Grid-Connected Voltage Source Inverters with a LCL Filter[C]. IEEE APEC’06, 2006: 1067-1073 [3]. R.Tirumala, N.Mohan, C.Henze. Seamless Transfer of Grid-connected PWM Inverters between Utilityinteractive and Stand-alone modes. IEEE APEC’02, 2002,2: 1081-1086 [4]. 张超,王章权,蒋燕君,何湘宁. 无差拍控制在光 伏 并 网 发 电 系 统 中 的 应 用 [J]. 电 力 电 子 技 术 , 2007,41(7): 3~5 [5]. 范小波,张代润.光伏并网逆变器数字滞环控制的研 究[J]. 电力电子技术,2006,40(6):46~48 [6]. 彭力,张宇等.高性能逆变器模拟控制器设计方法[J]. 中国电机工程学报, 2006,26(6):89~93 作者简介 梁超辉:男,1983 年生,硕士生。研究方向为光伏 发电系统并网控制 段善旭:男,1970 年生,教授,博士生导师。目前 主要研究方向为新能源发电及电能质量控制。 刘邦银:男,1979 年 12 月生,博士生,主要研究兴 趣为太阳能光伏发电技术
三电平逆变器调制方法

三电平逆变器调制方法1. 三电平逆变器调制方法是指一种将直流电能转换为交流电能的电子器件,它通过控制电路中的开关器件,将直流电源的电压转换为三个不同电平的交流电压。
2. 最常用的三电平逆变器调制方法是基于脉宽调制技术,其中包括两种主要调制方法:三角波脉宽调制(SPWM)和正弦波脉宽调制(SPWM)。
3. 在三角波脉宽调制方法中,参考电压信号通常是一个三角波形,它与待生成的交流电压进行比较,根据比较结果控制开关器件的通断情况,实现不同电平的输出电压。
4. 正弦波脉宽调制方法是基于生成与期望输出正弦波形相匹配的脉冲信号。
通常,通过选择适当的参数,如调制指数、频率等,来调整输出波形的质量。
5. 在三电平逆变器调制方法中,不同的开关状态会导致不同的输出电压水平。
在三电平逆变器中,有三种基本的开关状态:1) 上平态:正负中性电平之间的状态,2) 下平态:负中性和零中性之间的状态,3) 零平态:正中性和零中性之间的状态。
6. 三电平逆变器调制方法的目标是尽可能减小输出电压的谐波含量,以保证输出波形更接近理想的正弦波形。
7. 三电平逆变器调制方法可以采用单极性或双极性开关器件,具体选择取决于应用需求和性能要求。
8. 在三电平逆变器调制方法中,通常需要使用相应的控制算法来实现输出电压的精确控制。
9. 调制方法的选择取决于应用要求。
在某些高性能应用中,正弦波脉宽调制可能更适合,而在一些低成本应用中,三角波脉宽调制可能更为常见。
10. 在三电平逆变器调制方法中,需要注意的一个重要问题是开关器件的导通和关断损耗,以及这些损耗对转换效率的影响。
11. 在三电平逆变器调制方法中,常用的控制策略包括基于传统 PI 控制器、神经网络控制器、模糊逻辑控制器等。
12. 对于带有恒定负载的应用,三电平逆变器调制方法通常可以提供更稳定和高效的输出。
13. 对于带有非线性负载的应用,三电平逆变器调制方法可以降低输出谐波含量,减小对负载的干扰。
电力电子系统建模及控制7 第七章 逆变器的建模与控制

(7 4)
这里(vi)TS表示vi的开关周期平均值。而S的开关周 期平均值
S Dt Ts
式中,D(t)为占空比。
(7 5)
由图7-3得到 (规则采样法)
D
1 2
1
vm Vtri
(7 6)
式中,vm为参考正弦波信号; Vtri为三角载波峰值。
把式(7-6)代人式(7-4)有 :
vi
Ts
1C 1 s
1
s2
n2 2n s
n2
(7 11)
RC LC
式中,n
1 LC
为无阻尼自然振荡角频率,
n
1
,
LC ; 1 L 为阻尼比。
2R C
这是一个典型的二阶振荡系统,频率特性为
G
j
n2
n2
2
j
2n
1
n
1 2
j2 n
A e j
(7 12)
式中
式中,R=15Ω,L=660μH,C=22μF, Kpwm=E=380 (在设计时把三角载波的幅值当成1)。
由 式 (7-28) 可 以 解 得 内 环 PI 控 制 器 的 参 数 : Kip=2.63×10-4,Kii=2.18。设计的内环PI控制器如下:
H1
s
2.63104 s
s
2.18
7 29
考察一个滤波器性能的优劣:
➢ 对谐波的抑制能力,可以由THD值体现; ➢ 尽量减小滤波器对逆变器的附加电流应力。
电流应力增大,除使器件损耗及线路损耗加大外,另一 方面也使对功率元件的容量的要求增大。
附
T
加
H
电
D 矛盾 流
值
SPWM波控制逆变器双闭环PID调节器的建模与仿真
SPWM波控制逆变器双闭环PID调节器的建模与仿真随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。
逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion) 和负载突变时的动态响应水平。
在这些指标中对输出电压的THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。
文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。
针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。
通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。
并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
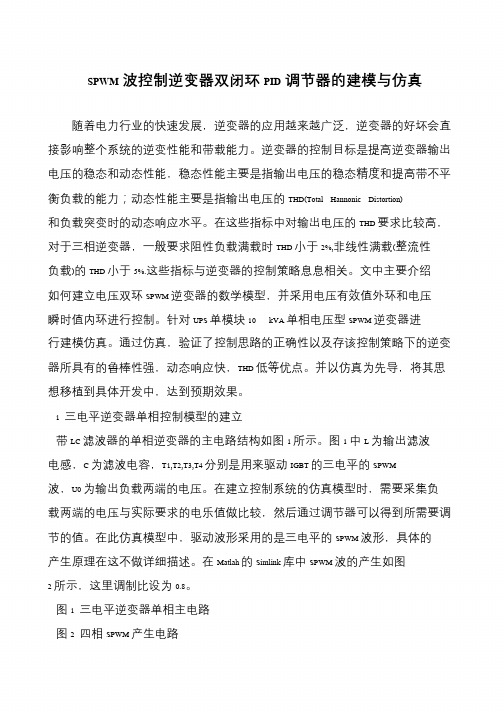
1 三电平逆变器单相控制模型的建立带LC 滤波器的单相逆变器的主电路结构如图1 所示。
图1 中L 为输出滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。
在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。
在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,具体的产生原理在这不做详细描述。
在Matlah 的Simlink 库中SPWM 波的产生如图2 所示,这里调制比设为0.8。
图1 三电平逆变器单相主电路图2 四相SPWM 产生电路。
基于重复和PI控制的中频逆变器复合控制方案

2 逆变器的数 学模型
图 1示 出 4 0 z单 相 全 桥 逆 变 器 等 效 电路 。 0H 其 40 0 Hz串联 谐 振 滤 波 环 节 由滤 波 电抗 和 滤 波
W U o we ,DUAN h n X Ha — i S a — H,YIDe g n — a g,LI Ba g yn U n — i
( ah n nvr o c n eadTc nl y Wu a 3 0 4 C i ) Huz ogU i s fS i c n eh o g , h n4 0 7 , hn e e o a
F u d t nP o etS po e yN t n l trl ce c o n aino hn ( o5 2 7 2 ) o n ai rj c :u p r db ai a Naua in eF u d t f ia N .0 3 00 o t o S o C
永磁同步电机电流环PI_控制器参数整定及优化

1. 5R s ,此时电机的电角速度 ω e = 0,通过对式(2) 中
的 d 轴电压方程进行化简得到电阻值,为
第 10 期
刘 林等:永磁同步电机电流环 PI 控制器参数整定及优化
Rs =
2 ud
。
3 id
133
(3)
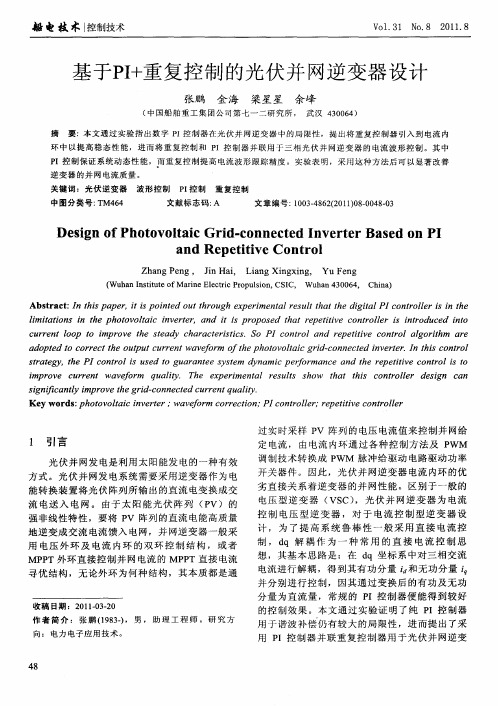
图 3 电流环控制框图
Fig. 3 Block diagram of current loop control
}
(2)
对永磁同步电机的内部结构进行分析,当给逆
类为基于模型的参数自整定 [5 - 8] ,这类参数自整定
变器施加固定占空比,电机得到固定电压,受电机内
方法为目前主流研究方法,基于模型的参数自整定
部的电感作用,电机的相电流将作用一段时间后快
对建立的数学模型和参数的精度依赖程度比较大;
速趋于稳定状态。 在空载情况下对电机参数进行辨
parameters with the best performance were optimized in the neighborhood of the initial value of PI parame-
ters by the two degree of freedom variable rotation method. The experimental results show that this method
法。 首先采用简单实用的离线参数辨识方法辨识出
电机的电阻和电感参数,然后将得到的电机参数代
入数学模型中整定出一组控制参数,最后以这一组
参数作为基于规则的参数自整定的初值,整定出最
优的控制参数,确保电机可以稳定启动运行。
1 永磁同步电机离线参数辨识
基于PI+重复控制的光伏并网逆变器设计
环 中以提高 稳态 性 能,进 而将 重复 控制和 P I控制 器 并联用 于三 相光 伏并 网逆 变器 的 电流 波形 控制 。其 中 P I控 制保证 系统动 态性 能 ,而 重复控 制提 高 电流 波形跟 踪精度 。实验表 明 ,采 用这种 方法 后可 以显著 改善 逆变 器 的并 网电流质量 。 关键 词 :光伏 逆变器 波形 控制 P控制 I 重复控 制
中图分类号 : M4 4 T 6
文献标 志码 : A
文章编 号: 0 34 6 (0 10 —0 80 10 —8 22 l) 80 4 .3
De i n o sg fPho o o t i i c nne t d I t v la c Gr d— 0 c e nve t rBa e r e s d on PI a pe ii e Con r l nd Re ttv t o
1 引 言
光 伏 并 网发 电 是利 用 太 阳能 发 电的 ~种 有 效
定 电流 , 由 电流 内环 通 过 各 种 控 制 方 法 及 P WM 调 制 技 术转 换成 P M 脉 冲 给 驱 动 电路 驱动 功 率 W 开 关 器件 。 因此 ,光 伏 并 网逆 变 器 电流 内环 的优 劣 直 接 关系 着 逆 变 器 的并 网性 能 。区 别 于一 般 的 电压 型逆 变 器 ( C) VS ,光 伏 并 网 逆 变 器 为 电流 控 制 电压 型 逆 变 器 , 对 于 电 流 控 制 型 逆 变 器 设
Zh n ng , Jn Ha , Ling Xi gx ng, Yu Fe a g Pe i i a n i ng
( h nIs tt o aieEe tcPo uso , SC, W u a 3 0 4 C ia Wu a tue f r l r rp lin C I ni M n ci h n4 0 6 , hn )
基于t型三电平双模式逆变器的控制技术研究-概述说明以及解释
基于t型三电平双模式逆变器的控制技术研究-概述说明以及解释1.引言1.1 概述概述随着能源需求的不断增加和环境保护的意识日益提高,可再生能源逆变器的研究和应用变得越来越重要。
而T型三电平双模式逆变器是一种相对较新的逆变器拓扑结构,具有高效率、低损耗和稳定性好的特点,因此在可再生能源领域受到了广泛的关注和应用。
本文将介绍T型三电平双模式逆变器的原理和控制技术。
首先,将详细阐述T型三电平双模式逆变器的工作原理,包括其电路结构和工作原理等。
其次,将探讨T型三电平双模式逆变器的控制技术,包括华表PWM 调制技术、电流闭环控制和电压闭环控制等。
文章将对T型三电平双模式逆变器的控制技术进行深入研究和分析,探索逆变器在实际应用中的优势和局限性,并针对其中存在的问题提出相应的解决方案和改进措施。
本文旨在为相关研究人员和工程师提供关于T 型三电平双模式逆变器控制技术的重要参考和指导。
通过本文的研究,有望进一步提高T型三电平双模式逆变器的性能,推动可再生能源逆变器技术的发展,为可再生能源的应用和发展做出更大的贡献。
同时,文章还将对未来相关研究的发展方向进行展望,以便进一步推动该领域的研究和应用。
1.2文章结构文章结构部分的内容可以如下所示:1.2 文章结构本文共分为三个部分:引言、正文和结论。
在引言部分,我们首先对基于T型三电平双模式逆变器的控制技术进行概述,介绍逆变器的基本原理和其在能源转换中的应用。
然后,我们将明确文章的结构和目的,为读者提供整体的框架和理解。
接下来,在正文部分,我们将详细阐述T型三电平双模式逆变器的原理和控制技术。
首先,我们将介绍逆变器的基本工作原理,包括其输入电压和输出电压之间的关系。
然后,我们将详细讨论T型逆变器的双模式控制技术,包括其开关信号的生成和控制策略。
我们将解释不同的控制算法和模式选择方法,并评估它们的性能和优缺点。
最后,在结论部分,我们将对本文进行总结,并提出对基于T型三电平双模式逆变器控制技术未来研究的展望。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
逆变器中PI控制器分析
PI 控制器是一种线性控制器,它原理简单,使用方便;适应性强;鲁棒性强,其控制品质
对被控对象的变化不太敏感,比较适合UPS 这类负载类型不确定的设备。
逆变器虽然是一
个非线性系统,但只取各个量的低频成分,可以等效为一个线性系统,当开关频率较高的时候,这种等效是可以接受的。
控制器中的比例项用以提高系统的动态响应性能,积分项用于缩小稳
态误差。
但在逆变器控制中,在静止坐标系下设计的 PI控制器无法让人满意,因为 PI 控
制器在非零频率处的增益不是无穷大,所以无法实现对正弦指令的无静差跟踪,会造成幅值
以及相位的误差。
后来提出的多环控制,例如输出滤波电感电流内环、电容电压外环的设计,虽然动态响应、带非线性负载性能更好了,但仍会存在稳态误差。
对于一个三相系统,更好的
策略是在旋转坐标系(d,q)下设计PI 控制器,三相正弦量在两相同步旋转坐标系中变成了
直流量,所以分别在两个坐标分量上用PI 控制器进行控制,可以使误差量为零。
由于在旋
转坐标中,两个坐标分量之间存在耦合,所以需要进行解耦控制。
对于单相系统,难以应用旋
转坐标的方法,要取得零稳态误差,可以使用比例谐振控制器(PR)。
三相系统也可以使用比
例谐振器来进行控制,这样可以免去坐标变换,但是文献证明,三相系统下,比例谐振控制器
只是旋转坐标系下的控制器在静止坐标下的等价实现。
如果仅仅使用电压单闭环 PI 控制,则系统的瞬态响应比较差,带非线性负载能力较弱,
为了取得更好的性能,可以使用电压外环、电流内环的双闭环控制结构。
电流内环可以有两
种方案,一种是控制滤波电感的电流,一种是控制滤波电容的电流。
电容电流内环的方案,在
谐波补偿效果以及动态响应方面都比电感电流内环的方案好,且对电流传感器的要求比较低,可降低成本,只是电容电流内环无法实现过流保护。