柔性离合器教程FFlex
液压摇臂钻离合器调整【干货技巧】
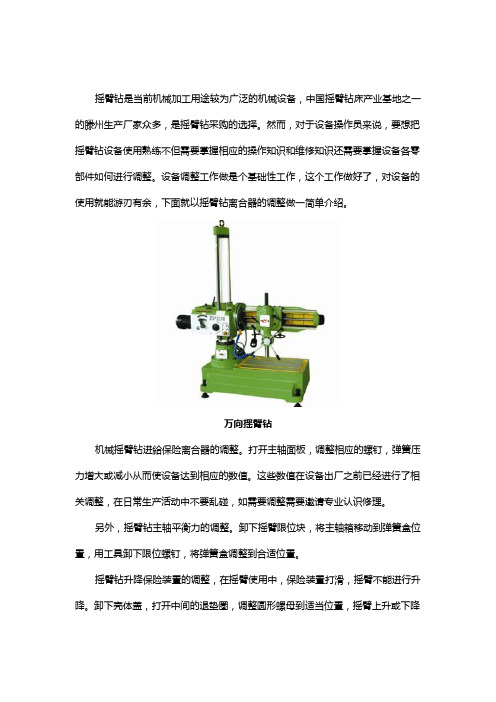
摇臂钻是当前机械加工用途较为广泛的机械设备,中国摇臂钻床产业基地之一的滕州生产厂家众多,是摇臂钻采购的选择。
然而,对于设备操作员来说,要想把摇臂钻设备使用熟练不但需要掌握相应的操作知识和维修知识还需要掌握设备各零部件如何进行调整。
设备调整工作做是个基础性工作,这个工作做好了,对设备的使用就能游刃有余,下面就以摇臂钻离合器的调整做一简单介绍。
万向摇臂钻
机械摇臂钻进給保险离合器的调整。
打开主轴面板,调整相应的螺钉,弹簧压力增大或减小从而使设备达到相应的数值。
这些数值在设备出厂之前已经进行了相关调整,在日常生产活动中不要乱碰,如需要调整需要邀请专业认识修理。
另外,摇臂钻主轴平衡力的调整。
卸下摇臂限位块,将主轴箱移动到弹簧盒位置,用工具卸下限位螺钉,将弹簧盒调整到合适位置。
摇臂钻升降保险装置的调整,在摇臂使用中,保险装置打滑,摇臂不能进行升降。
卸下壳体盖,打开中间的退垫圈,调整圆形螺母到适当位置,摇臂上升或下降
到顶峰位置,保险装置将会失去作用,如果摩擦力大于电动机的最大旋转力,调整螺母,减小摩擦即可。
邦琪CVT变速箱离合器自学习

邦琪CVT变速箱离合器自学习
CVT是依靠油压转动,而油压的供给以及供给的大小则是根据连接发动机输出轴的转数,因为CVT内部的油泵轴与发动机输出轴相连,当车挂入D挡后,随着发动机转速,转速越高CVT内的油压越大,车速也就越快。
在XCU刷新软件(更换TCU)或更换变速箱或更换液压控制单元,离合器需要自适应更新,用于补偿生产工艺过程产生的公差。
当在特定的温度下进行更新,则电流的值会经过计算复制到每一个温度下,这个过程是自动进行的,由于离合器公差的不同,有可能有的变速箱离合器复制数据而有的变速箱离合器不复制数据。
下面是能够进行自学习过程的一些主要的条件:车辆静止;不能踩油门;稳定的发动机怠速;转速;稳定的发动机扭矩;脚踩刹车。
更新过程如下:
按以下的操作,进行在某一确定温度下的离合器自学习更新。
1.先挂入N档,等5秒钟
2.挂入D档等大约45秒钟,车子有明显冲击后,挂入N档
3.N档等5秒钟后,挂入R档,同样等大约45秒钟,待车子明显冲击后,挂入N档。
4.N档挂入D档,等5秒钟
5.D档挂入N档,等5秒钟
6.N档挂入R档,等5秒钟
7.R档挂入N档
8.将4、5、6、7步骤,做3到5次车内仪表盘的指示灯熄灭后,表示自学习值完成。
若灯仍亮,重新做!
当车出现故障,则维修人员需用检测仪检测并且读出故障码,并且在服务手册中查询故障码,并且按照服务手册的说明进行维修。
基于OrcaFlex的海洋柔性管水动力分析
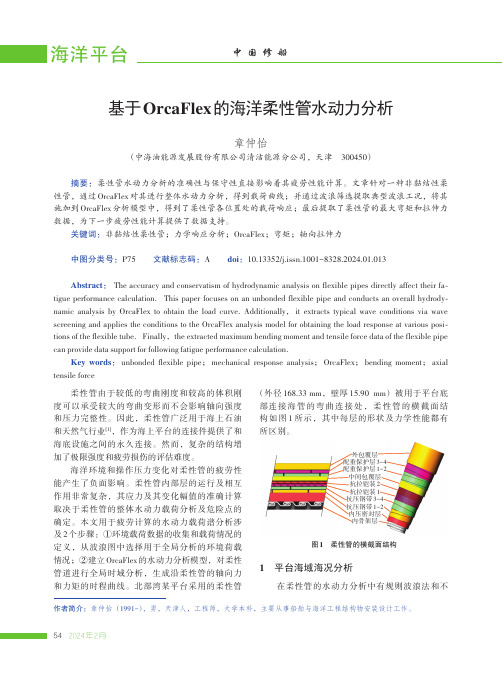
基于OrcaFlex 的海洋柔性管水动力分析章仲怡(中海油能源发展股份有限公司清洁能源分公司,天津300450)摘要:柔性管水动力分析的准确性与保守性直接影响着其疲劳性能计算。
文章针对一种非黏结性柔性管,通过OrcaFlex 对其进行整体水动力分析,得到载荷曲线;并通过波浪筛选提取典型波浪工况,将其施加到OrcaFlex 分析模型中,得到了柔性管各位置处的载荷响应;最后提取了柔性管的最大弯矩和拉伸力数据,为下一步疲劳性能计算提供了数据支持。
关键词:非黏结性柔性管;力学响应分析;OrcaFlex ;弯矩;轴向拉伸力中图分类号:P75文献标志码:Adoi :10.13352/j.issn.1001-8328.2024.01.013Abstract :The accuracy and conservatism of hydrodynamic analysis on flexible pipes directly affect their fa⁃tigue performance calculation.This paper focuses on an unbonded flexible pipe and conducts an overall hydrody⁃namic analysis by OrcaFlex to obtain the load curve.Additionally ,it extracts typical wave conditions via wave screening and applies the conditions to the OrcaFlex analysis model for obtaining the load response at various posi⁃tions of the flexible tube.Finally ,the extracted maximum bending moment and tensile force data of the flexible pipe can provide data support for following fatigue performance calculation.Key words :unbonded flexible pipe ;mechanical response analysis ;OrcaFlex ;bending moment ;axialtensile force作者简介:章仲怡(1991-),男,天津人,工程师,大学本科,主要从事船舶与海洋工程结构物安装设计工作。
膜片弹簧离合器的拆装(附图)

膜片弹簧离合器的拆装
一、目的和要求
1、了解离合器压板总成的结构特点,熟悉各零部件名称和相互连接关系。
2、了解离合器从动盘的结构特点。
3、掌握离合器的工作原理。
二、实验器材
1、工具
常用工具1套。
2、设备
膜片弹簧总成一套
三、实验方法
1、拆卸
第一步:拆下飞轮壳。
第二步:用对角线交叉法分次旋下离合器与飞轮的固定螺栓。
拆下离
合器总成及磨擦片。
2、观察
仔细观查各零部件的结构特点和相互连接关系,熟悉零件名称。
3、装配
将磨擦片、离合器盖总成依次安装在飞轮上,旋上离合器盖与飞轮的固定螺栓,螺栓不要旋紧,旋至从动盘不掉下即可,将芯轴插入离合器从动盘及曲轴后端的轴承孔内,确保从动盘位置的正确,将离合器盖与飞轮的固定螺栓分次对角拧紧。
(用离合器拆装.mpg表示)
四、注意事项
1、离合器从动盘摩擦片不能有油污。
2、注意安装时从动盘带减振弹簧突出的一面朝压盘。
3、在安装前要检查从动盘毂花键与输入轴花键的配合情况,正常情况下运动自由,但不卡滞,不能有明显的松旷感觉。
hypermesh柔性体教程

第一步:导入模型:第二步:设置材料属性(注意红圈之内的单位属性,可根据实际情况修改,此处不做修改)第三步:网格划分(这里为实体网格,可以为四面体,也可以为6面体)第四步:提取面网格(命令:tool-faces)在components里面会有名字为faces的component,点击collector命令,选择update,选择faces(可以改变名称,这里后面的名称位skin)的component,点击update/edit第五步;设置此component属性注意上图中红圈的标记,要选择的第六步:创建刚性单元和刚性区域这里有两个刚性区域,具体创建步骤不再详述第七步:创建load collectors创建名字为aset的load collectors,此load collector为约束,在创建约束的时候使用no card;创建名字为cms的load collectors,此load collector定义模态,card=cmsmeth,然后点击create/edit,出现以下面板,进行编辑第八步;创建约束在global面板下将loadcol选择位ASET点击return进入analysis面板,选择constraints命令,选择刚性区域中心的两个节点,6个自由度根据需要来选择或者取消点击create第九步:设置entity set在analysis面板下点击entity set,name=skin,entity设置为comps,并选择skin(faces)点击create,创建entity set第十步:设置load types在analysis面板下选择load types,进入load types面板,将constraint=设置为ASET第十一步:创建载荷步在analysis面板下选择subcase命令,按照下图设置载荷步CMSMETH选择前面创建的CMS第十二步:设置控制卡片在analysis面板下选择control card命令,进入控制卡片设置面板点击DISPLACEMENTS-RETURN设置结果的位移输出;点击DTI_UNITS设置单位点击next选择STRAIN命令,进入如下面板将STRAIN_OPT设置为PSID,双击PSID选择SKIN以同样的方法设置STRESS控制卡如果需要其他的设置,可自行选择。
ADAMS柔性体-刚柔耦合模块详解
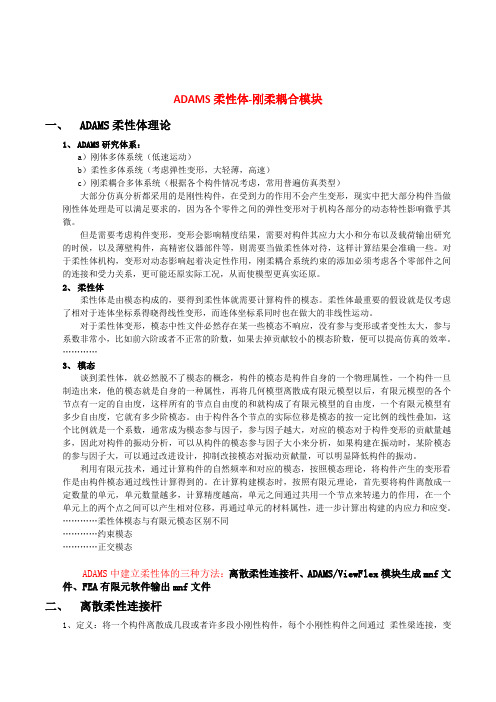
ADAMS柔性体-刚柔耦合模块一、ADAMS柔性体理论1、ADAMS研究体系:a)刚体多体系统(低速运动)b)柔性多体系统(考虑弹性变形,大轻薄,高速)c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型)大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。
但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。
对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。
2、柔性体柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。
柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。
对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。
…………3、模态谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。
由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。
离合器的拆装过程及要点
离合器的拆装过程及要点嘿,伙计们!今天我们来聊聊一个很有趣的话题——离合器的拆装过程及要点。
你知道吗?离合器可是汽车里非常重要的一个部件,它就像是咱们的“心脏”,负责把发动机和变速器连接起来,让车子能够顺利地行驶。
那么,离合器的拆装过程到底是怎样的呢?让我们一起来揭开这个神秘的面纱吧!咱们要准备好一些工具和材料。
离合器的拆装过程可能会用到的工具有:扳手、螺丝刀、千斤顶、手套等。
材料方面,我们需要一把离合器压盘、一个离合器分泵、一根离合器导管以及一些润滑油。
有了这些工具和材料,我们就可以开始拆装离合器了!第一步,我们要先拆卸离合器压盘。
这个过程其实并不复杂,只需要用扳手将压盘上的螺丝拆下来,然后取下压盘即可。
不过要注意的是,在拆卸过程中要小心不要损坏压盘上的零件哦!第二步,我们要拆卸离合器分泵。
这个过程稍微有点复杂,需要用到千斤顶。
首先将车子放在千斤顶上,然后用扳手拆卸分泵上的螺丝。
接下来,我们需要找到分泵与压盘之间的连接处,将连接处的螺丝拆下来,然后取下分泵。
注意在拆卸过程中要确保千斤顶的压力适中,以免对车子造成损害。
第三步,我们要拆卸离合器导管。
这个过程也比较简单,只需要用扳手将导管上的螺丝拆下来,然后取下导管即可。
不过要注意的是,在拆卸过程中要确保导管的方向正确,否则会影响离合器的正常工作。
第四步,我们要清洗离合器。
在拆卸完离合器之后,我们需要将其清洗干净,以便进行下一步的安装。
在清洗过程中,可以使用一些专门的清洗剂和刷子,将离合器上的污垢彻底清除干净。
第五步,我们要组装离合器。
在清洗完离合器之后,我们需要将其重新组装起来。
首先将压盘安装到变速器上,然后将分泵安装到压盘上。
接下来,将导管安装到分泵上,并确保导管的方向正确。
将润滑油加入离合器中,以保证其正常工作。
好了,经过以上五个步骤,我们的离合器就拆装完成了。
这只是整个过程的一部分,还有很多细节需要注意。
不过只要我们按照正确的步骤进行操作,相信大家都能够轻松完成离合器的拆装工作。
离合器使用说明书(压力控制器)
4、三号压力控制器(工作压力检测)压力调到 6.5kg/cm2(0.65MPa)。 5、减压阀压力调到 7kg/cm2。(0.7MPa) 6、若整个系统连锁正常,有关设备均已处于"起动准备”状态,磨机启动前的准备工作
即告完成。 九、磨机的启动
启动磨机之前应作如下常规检查 1、确认减压阀、安全阀的调定压力符合规定,压力表的读数不低于 7 Kgf/cm2(0.7Mpa); 2、检查整个系统是否漏气,发现问题,及时处理。 ㈠ 离合器的试启动 1、磨机主电机不开,调减压阀压力到 7~7.3kg/cm2,向离合器冲气,离合器冲气迅速无 堵塞。 2、离合器调好后放气迅速。 3、冲放数次。 ㈡ 磨机的启动 1、确认指示灯指示离合器内无大于 0.4kgf/cm2(0.04MPa)的压力后,启动磨机主电动机。 2、气动离合器电控箱上的绿灯亮时,电动机即已达到其同步转速。 3、电动机达到同步转速后,向离合器充气。磨机启动,此时应测定磨机由静止状态达到 额定转速所需的时间,磨机达到额定速度的时间不应超过 7 秒。 4、放出离合器里的压缩空气,使离合器脱开。 5、调整单向节流阀,使磨机由静止至达到额定转速的时间(加速全过程)在 4~7 秒之间 完成,拧紧背帽,锁紧调整螺钉。调整单向节流阀一定要针对磨机负荷条件进行。磨机满负荷 运行时单向节流阀全开。 6、必须避免连续三次以上的启动,防止烧坏离合器。两次启动的间隔时间不得少于 15 分钟。 十、离合器的维护 1、空压机 2~4 周定期排水。 2、进气‘分水滤汽器’每班定期排水排脏,出气‘分水滤汽器’每班定期排水排脏。冲 气不畅更换滤芯。 3、空压机定期更换润滑油。 十一、操作 首先要确认电动机控制柜上的指示灯指示离合器内无空气压力后,方能起动主电动机,
工作至关重要,要按规定的管子尺寸接入和接出气动控制系统。
摩擦式离合器_压紧力_摩擦力和扭矩的力学关系__概述及解释说明
摩擦式离合器压紧力摩擦力和扭矩的力学关系概述及解释说明1. 引言1.1 概述摩擦式离合器是一种常见的机械装置,广泛应用于各种机械设备和车辆中。
它通过利用摩擦力来传递扭矩,实现输出轴与输入轴之间的连接或断开。
摩擦式离合器的性能受到压紧力以及所产生的摩擦力大小的影响。
本文将探讨摩擦式离合器中压紧力、摩擦力和扭矩之间的力学关系,并对其进行解释。
1.2 文章结构本文分为五个部分进行介绍和探讨。
首先是引言部分,对文章的主题进行了总体的概述和说明;接下来是对摩擦式离合器的介绍,包括其结构和工作原理;然后是对压紧力这一重要参数的详细解析;接着是对摩擦力与扭矩之间关系的论述;最后在结论部分总结了全文。
1.3 目的本文旨在深入了解并解释摩擦式离合器中压紧力、摩擦力和扭矩之间的关系。
通过对这些力学关系的研究,我们可以更好地理解摩擦式离合器的性能以及其在机械传动系统中的应用。
同时,本文也旨在为读者提供有关摩擦式离合器的基础知识和理论背景,以促进相关领域的深入学习和进一步研究。
2. 摩擦式离合器摩擦式离合器是一种常见的机械装置,用于连接和断开传动轴上的两个旋转部件。
它主要由两个主要部分组成:驱动部分和从动部分。
2.1 驱动部分驱动部分通常由发动机提供动力,通过输入轴将转动力矩传递给离合器。
在摩擦式离合器中,驱动部分包括压盘、发卡片和导向轴等组件。
- 压盘:压盘是安装在发卡片上的圆形或菱形金属板。
当发卡片施加压力时,压盘会受力并产生摩擦。
- 发卡片:发卡片是连接到引擎的旋转圆盘,通过液压、气压或弹簧等方式使其与压盘接触。
- 导向轴:导向轴用于支撑和固定整个驱动部分的组件。
2.2 从动部分从动部分通常由输出轴、摩擦片和承载座等组件组成。
- 输出轴:输出轴位于传输系统的末端,用于根据需要将转速和扭矩传递给其他机械装置。
- 摩擦片:摩擦片是安装在输出轴上的摩擦材料,通常为高温高压摩擦材料。
当压盘施加力时,摩擦片与压盘接触并产生摩擦力。
13_ADAMS_CAR模块详细实例教程(柔性体篇)
13柔性体介绍 (253)13.1柔性体引入ADAMS建模 (253)13.1.1打开原有的X5后悬架模板 (253)13.1.2将小连杆的模态中性文件导入ADAMS (254)13.2利用Hyper Mesh及Motion View软件来生成模态中性文件MNF (256)13.2.1创建小连接杆的CAD模型 (256)13.2.2将iges格式文件导入到Hyper Mesh划分网格 (257)13.2.3创建材料 (268)13.2.4创建刚性单元 (273)13.2.5给刚性中心节点编号 (282)13.2.6导出nastran模板格式文件 (283)13.2.7创建h3d文件及MNF文件 (284)252《柔性体篇》13柔性体介绍在模型中引入柔性体可以提高仿真的精度。
柔性体可采用模态中性文件(MNF)来描述。
该文件是一个二进制文件,包含了以下信息:几何信息(结点位置及其连接);结点质量和惯量;模态;模态质量和模态刚度。
可以利用ANSYS、NASTRAN、ABAQUS等限元软件包进行分析并将结果写成模态中性文件,输入到ADAMS/View或ADAMS/Car中,建立相应零件的柔性体。
13.1柔性体引入ADAMS建模在模型中引入柔性体首先要在ADAMS/Car中读入模态中性文件,然后ADAMS/Car会创建必要的几何实体用以显示柔性体。
然后在模型中与其它刚体部件之间施加约束。
本教程以后悬架的小连接板为例。
13.1.1打开原有的X5后悬架模板25313.1.2将小连杆的模态中性文件导入ADAMS在ADAMS/Car中读入模态中性文件的过程如下:1)从Build菜单中选择Parts>Flexible Body>New设定对话框如下,在Left Modal Neutral File和Right Modal Neutral File里右击鼠标选择自己已经创建好的MNF文件,点击OK。
2542552)创建柔性体与刚体的中间连接体Interface Part柔性体不能直接与刚体建立约束,必须通过中间体来连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柔性离合器教程(FFlex) 2 Copyright © 2017 FunctionBay, Inc. All rights reserved User and training documentation from FunctionBay, Inc. is subjected to the copyright laws of the Republic of Korea and other countries and is provided under a license agreement that restricts copying, disclosure, and use of such documentation. FunctionBay, Inc. hereby grants to the licensed user the right to make copies in printed from of this documentation if provided on software media, but only for internal/personal use and in accordance with the license agreement under which the applicable software is licensed. Any copy made shall include the FunctionBay, Inc. copyright notice and any other proprietary notice provided by FunctionBay, Inc. This documentation may not be disclosed, transferred, modified, or reduced to any form, including electronic media, or transmitted or made publicly available by any means without the prior written consent of FunctionBay, Inc. and no authorization is granted to make copies for such purpose.
Information described herein is furnished for general information only, is subjected to change without notice, and should not be construed as a warranty or commitment by FunctionBay, Inc. FunctionBay, Inc. assumes no responsibility or liability for any errors or inaccuracies that may appear in this document.
The software described in this document is provided under written license agreement, contains valuable trade secrets and proprietary information, and is protected by the copyright laws of the Republic of Korea and other countries. UNAUTHORIZED USE OF SOFTWARE OR ITS DOCUMENTATION CAN RESULT IN CIVIL DAMAGES AND CRIMINAL PROSECUTION.
Registered Trademarks of FunctionBay, Inc. or Subsidiary RecurDyn™ is a registered trademark of FunctionBay, Inc.
RecurDyn™/SOLVER, RecurDyn™/MODELER, RecurDyn™/PROCESSNET, RecurDyn™/AUTODESIGN, RecurDyn™/COLINK, RecurDyn™/DURABILITY, RecurDyn™/FFLEX, RecurDyn™/RFLEX, RecurDyn™/RFLEXGEN, RecurDyn™/LINEAR, RecurDyn™/EHD(Styer), RecurDyn™/ECFD_EHD, RecurDyn™/CONTROL, RecurDyn™/MESHINTERFACE, RecurDyn™/PARTICLES, RecurDyn™/PARTICLEWORKS, RecurDyn™/ETEMPLATE, RecurDyn™/BEARING, RecurDyn™/SPRING, RecurDyn™/TIRE, RecurDyn™/TRACK_HM, RecurDyn™/TRACK_LM, RecurDyn™/CHAIN, RecurDyn™/MTT2D, RecurDyn™/MTT3D,
RecurDyn™/BELT, RecurDyn™/R2R2D, RecurDyn™/HAT, RecurDyn™/曲柄, RecurDyn™/PISTON, RecurDyn™/VALVE, RecurDyn™/TIMINGCHAIN, RecurDyn™/ENGINE, RecurDyn™/GEAR are trademarks of FunctionBay, Inc.
Third-Party Trademarks Windows and Windows NT are registered trademarks of Microsoft Corporation.
ProENGINEER and ProMECHANICA are registered trademarks of PTC Corp. Unigraphics and I-DEAS are registered trademark of UGS Corp. SolidWorks is a registered trademark of SolidWorks Corp. AutoCAD is a registered trademark of Autodesk, Inc.
CADAM and CATIA are registered trademark of Dassault Systems. FLEXlm is a registered trademark of GLOBEtrotter Software, Inc. All other brand or product names are trademarks or registered trademarks of their respective holders.
Edition Note These documents describe the release information of RecurDyn™ V9R1. 3
目录 预备工作 ............................................................................................ 5 目标 ................................................................................................................... 5 读者 ................................................................................................................... 5 预备知识 ............................................................................................................ 5 步骤 ................................................................................................................... 5 预计完成的时间 .................................................................................................. 6 导入模型几何 ..................................................................................... 7 任务目标 ............................................................................................................ 7 预计完成的时间 .................................................................................................. 7 柔性离合器模型 .................................................................................................. 8 启动RecurDyn .................................................................................................... 9 导入柔性离合器片网格数据 ................................................................................ 9 导入刚体几何 ................................................................................................... 11 增加运动副和力 ............................................................................... 13 任务目标 .......................................................................................................... 13 预计完成的时间 ................................................................................................ 13 创建旋转副 ....................................................................................................... 14 创建扭矩表达式 ................................................................................................ 16 创建驱动和负载扭矩 ........................................................................................ 18 定义表面和接触 ............................................................................... 20 任务目标 .......................................................................................................... 20 预计完成的时间 ................................................................................................ 20 模型中的接触 ................................................................................................... 21 创建片集 .......................................................................................................... 22 创建面表面 ....................................................................................................... 24 创建接触 .......................................................................................................... 25 调整接触 .......................................................................................................... 29