探测型自主水下航行器(AUV)
【毕业设计】水下自主航行器结构设计

ForAUVspecificdesignlayereddesignfromthestart,top-downdesign,respectivelyspecificdesign,conceptdesign,spaceforotherdesignmethods.Specificmethodsforthepreliminarydesign:Afterdeterminingthedesignrequirements,combinedwithpreviousdataanalysisdone,thechoiceoftheoptimaldesignforfurtherresearchfromavarietyofdesigns,andthenmakeapreliminaryselectionofempiricalformulascheck,completethepreliminarydesign.
海洋具有丰富的资源,海洋生物可以食用、药用、科研、娱乐观赏与提取生物能等;海洋潮汐、温差等物理资源可以用于发电;海洋中的化学资源,例如海水中的淡水、痕量元素(金、铀、氘、溴、碘、镁、钾等)、化合物(食盐、芒硝、石膏、重水、卤水等)等;海洋中的矿物资源(锰核、石油、天然气、矿砂、底砂等);以及海洋的空间资源等[1]。
海洋的竞争是新一轮的国际竞争,开发海洋需要高技术手段,对于海洋的开发与保护是维护可持续发展与国家安全的必然要求。由于人的潜水深度有限,水下机器人成为代替人类进行水下的作业的重要工具,目前开发海洋的工作离不开水下机器人的发展。
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
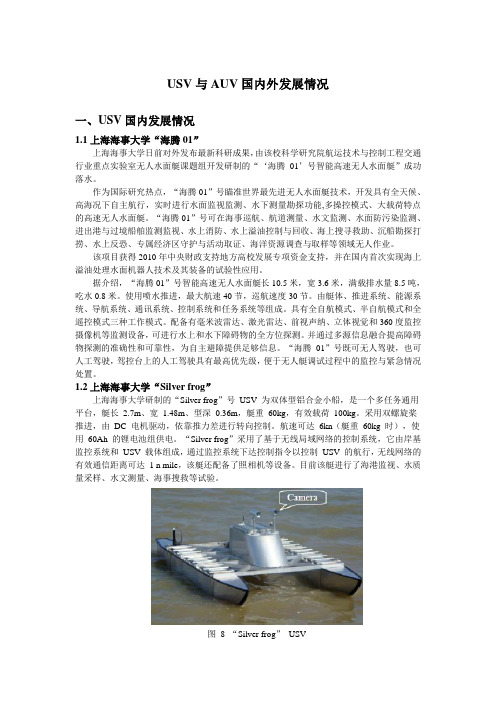
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
小型模块化水下自主航行器技术概况
小型模块化水下自主航行器技术概况发布时间:2022-08-02T08:05:59.367Z 来源:《科学与技术》2022年3月6期作者:曹晓霖[导读] 水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、曹晓霖中国船舶集团有限公司第七一〇研究所湖北宜昌 443003摘要:水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、小型化可以有效较小AUV的操纵性和便携性。
针对AUV小型化和模块化设计问题进行了全面的剖析,首先对小型模块化AUV的国内外发展现状进行了分析,然后对小型模块化AUV 国内外的差距和关键技术进行了总结,最后对小型模块化AUV的应用前景进行了探讨。
关键词:模块化AUV;研究现状;关键技术;应用前景Technology Survey of Small Modular Autonomous Underwater VehicleCAO Xiaolin(No. 710 R&D Institute, CSSC, Yichang 443003, China)Abstract:Autonomous underwater vehicle (AUV) is developing towards miniaturization and modularization. The highly integration and miniaturization of AUV system can effectively reduce the maneuverability and portability of AUV. AUV miniaturization and modularization design problems are comprehensively analyzed. First of all, the development status of small modular AUV at home and abroad are analyzed. Then, the gap and key technologies of small modular AUV at home and abroad are summarized. Finally, application prospects of small modular AUV are discussed. Key words:modular AUV; development status; key technologies; application prospects引言:为满足深海海洋科学调查的需要,我国陆续开展了水下自主航行器技术的研究。
rov和auv的原理及应用范围

ROV和AUV的原理及应用范围一、ROV(远程操作无人潜水器)的原理ROV是一种远程操作无人潜水器,它是通过控制线缆与母船相连,由远程操作员在母船上进行控制的。
ROV的工作原理主要包括以下几个方面:1.动力系统:ROV通常采用电力作为动力源,通过电缆与母船连接。
电缆不仅提供动力,还需要传递视频信号和控制信号。
ROV的动力系统通常包括电机、推进器等组件,能够实现在水下的自由移动。
2.传感器系统:ROV配备了各种传感器,用于获取水下环境的信息。
传感器系统通常包括摄像头、声纳、压力传感器、温度传感器等。
这些传感器能够提供水下景象的图像和声音,以及水下环境的物理参数。
3.通信系统:ROV通过电缆与母船通信,实现远程操作。
通信系统主要包括数据传输和控制信号传输两个方面。
数据传输主要通过传感器获取的水下信息传输,而控制信号传输用于将操作员的指令传输给ROV。
4.控制系统:ROV的控制系统主要由操作员在母船上的控制台实现。
通过操作控制台上的杆杠和按钮,操作员可以远程控制ROV在水下进行各种动作,如前进、转弯、下潜等。
二、ROV的应用范围由于ROV具有灵活、可靠的特点,因此在许多领域得到了广泛的应用。
以下是ROV的主要应用范围:1.海洋勘探:ROV能够深入海底,通过传感器获取海洋环境的信息,包括水下地貌、海洋生物、海洋资源等。
ROV的应用可以帮助科学家更好地了解海洋的特点,推动海洋科学的发展。
2.海底维修:ROV可以在水下进行各种维修和检测工作,例如修复海底管道、检查海底油井等。
ROV的使用减少了人类进行危险任务的风险,提高了工作效率。
3.海洋考古:许多重要的历史遗迹和沉船遗骸埋藏在海底,ROV可以帮助考古学家进行海底考古工作。
ROV可以通过摄像头拍摄和记录海底遗址的情况,非常有助于保护和研究文化遗产。
4.水下科学研究:ROV的应用在水下科学研究中起着重要的作用。
通过ROV,科学家可以进行水下探测、样品采集、生物观察等工作,从而深入了解水下生态系统和自然界的奥秘。
自主水下航行器导航与定位技术

自主水下航行器导航与定位技术发布时间:2023-02-03T02:36:04.888Z 来源:《科学与技术》2022年第18期作者:杜晓海[导读] 自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,杜晓海海军装备部 710065摘要:自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,在执行任务时需要准确的定位信息。
现有AUV主要采用基于捷联惯性导航系统(SINS),辅以声学导航和地球物理场匹配导航技术。
本文简要介绍了水下导航模式的基本原理、优缺点和适用场景;讨论了各种导航模式中的关键技术,以提高组合导航的精度和稳定性。
通过分析现阶段存在的问题,展望了水下航行的未来发展趋势。
关键词:自主水下航行器;智能导航;智能定位本文综述了目前主流的AUV水下导航关键技术,包括DVL测速技术、LBL/SBL/USBL水声定位导航技术、地形辅助导航技术、地磁辅助导航技术和重力辅助导航技术以及协同导航技术,介绍了相关导航技术的基本原理和发展,分析和总结了水下自主导航中各技术的关键问题和技术难点,最后展望了AUV水下导航技术的未来发展。
1 SINS/DVL定位技术DVL是一种利用声波多普勒效应测量载流子速度的导航仪器。
根据AUV与水底之间的相对距离,DVL有两种模式:水底跟踪和水底跟踪。
当载流子与水底的相对距离在该范围内时,声波可以到达水底,当AUV与水底之间的相对距离超过范围时,声波无法到达水底,DVL采用水跟踪模式。
根据传输波速的多少,可以分为单波束、双波束和四波束。
1.1 SINS/DVL对准技术惯性导航可以为AUV提供实时的姿态、速度、位置等导航信息。
然而,初始对准必须在使用前进行,初始对准的结果在很大程度上决定了最终的集成精度。
通常,AUV在停泊或航行于水面时接收GPS信号进行初始对准。
在特定的任务背景下,AUV需要在水下运动期间完成初始对准,因此,许多学者提出了基于DVL辅助的移动基站对准。
自主水下航行器自噪声控制及实验验证

自主水下航行器自噪声控制及实验验证张 明,马骁晨,李建龙(浙江大学 信息与电子工程学院,浙江 杭州 310027)摘要: 自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种可以根据预设任务,在水下自主航行的无人潜水器,其作为移动测量平台逐渐被应用于海洋环境监测、水下目标识别、水底地形探测等领域。
由于AUV平台较小,其自噪声严重制约搭载于平台的声呐系统性能,如何有效控制AUV的自噪声,对于平台声呐系统实现最佳性能具有重要实际意义。
AUV的自噪声主要由航行器舵机等产生的机械噪声、螺旋桨噪声和水动力噪声几部分组成。
本文通过AUV平台与声呐系统一体化控噪设计,利用机械降噪、隔振材料、智能控制等手段,对AUV进行系统性噪声控制。
通过室内和湖上实验,测试平台不同部件、不同工况下的噪声特性,以及降噪效果。
搭载声呐系统的平台湖上自噪声测量试验结果表明,在典型平均航速为3 kn情况下,平台自噪声1 kHz以上频段可控制在80 dB以下。
关键词:自主水下航行器;自噪声;降噪;智能控制中图分类号:TB52;TB53;TP273 文献标识码:A文章编号: 1672 – 7649(2020)12 – 0146 – 04 doi:10.3404/j.issn.1672 – 7649.2020.12.029Autonomous underwater vehicle self-noise control and experimental validationZHANG Ming, MA Xiao-chen, LI Jian-long(College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 310027)Abstract: Autonomous Underwater Vehicle (AUV) is an unmanned submersible that can navigate autonomously un-der water according to preset tasks. As a mobile measurement platform, it is gradually being used in marine environment monitoring, underwater target recognition, underwater terrain detection and other fields. Since the AUV is small, its self-noise severely restricts the performance of the sonar system mounted on the platform. How to effectively control the self-noise of the AUV is of great practical significance for the platform sonar system to achieve the best performance. The self-noise of AUV is mainly composed of mechanical noise generated by steering gear, propeller noise and hydrodynamic noise. In this paper, through the integrated noise control design of the AUV and the sonar system, the use of mechanical noise re-duction, vibration isolation materials, intelligent control and other means to systematically control the AUV. Through indoor and lake experiments, we tested the noise characteristics and the noise reduction effect of different components of the plat-form, under different working conditions; finally carried out the self-noise measurement test on the AUV equipped with son-ar system. The experimental results showed that the platform self-noise above 1 kHz can be controlled below 80 dB with typ-ical average speed of 3 kn.Key words: AUV;self-noise;noise reduction;intelligent control0 引 言自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种可以根据预设任务,在水下自主航行的无人潜水器,具有自主航行、自主导航、自主探测的功能[1 – 4]。
auv的工作原理

auv的工作原理AUV的工作原理一、引言自主水下机器人(Autonomous Underwater Vehicle,简称AUV)是一种能够自主进行水下任务的机器人。
它不需要人工操控,能够完成海底测绘、海洋科学研究、海底资源勘探等任务。
本文将介绍AUV的工作原理,包括传感器系统、导航与控制系统以及通信系统等。
二、传感器系统AUV的传感器系统是其工作的基础,它能够感知周围环境的参数,为后续的决策与控制提供数据支持。
传感器系统通常包括声纳、摄像头、压力传感器、温度传感器等。
声纳可以用于测量水下距离和地形,摄像头可以拍摄水下图像,压力传感器可以测量水下深度,温度传感器可以测量水温。
通过这些传感器的工作,AUV能够获取周围水下环境的信息。
三、导航与控制系统导航与控制系统是AUV的大脑,它能够根据传感器获取的数据进行决策和控制。
导航与控制系统通常包括惯性导航系统、姿态控制系统和路径规划系统。
惯性导航系统可以通过加速度计和陀螺仪测量AUV的加速度和角速度,从而确定位置和姿态。
姿态控制系统可以根据惯性导航系统的数据对AUV进行姿态控制,使其保持平稳的运动。
路径规划系统能够根据任务要求和环境条件,确定AUV的运动路径,使其能够高效地完成任务。
四、通信系统通信系统是AUV与外界进行信息交流的重要手段。
AUV通常配备有无线通信设备,可以通过无线信号与地面控制中心进行通信。
地面控制中心可以通过无线信号发送指令和接收数据,实时监控AUV 的工作状态。
同时,AUV也可以通过通信系统将获取的数据传输回地面控制中心,供后续分析和处理。
五、工作流程AUV的工作流程通常包括任务规划、传感器数据获取、导航与控制决策、执行任务和数据传输等步骤。
首先,地面控制中心根据任务需求进行任务规划,确定AUV的工作区域和任务目标。
然后,AUV根据任务规划进入工作状态,开始进行传感器数据的获取。
传感器系统将获取的数据传输给导航与控制系统,导航与控制系统根据传感器数据进行决策和控制。
机器人助力深海环境监测的最新发现

机器人助力深海环境监测的最新发现 在广袤无垠的海洋世界中,深海区域一直充满着神秘和未知。随着科技的不断进步,机器人逐渐成为我们探索深海环境的得力助手,为我们带来了一系列令人瞩目的最新发现。
深海,那是一个压力巨大、温度极低且光线微弱的世界。对于人类而言,直接深入这样的环境进行长期、细致的监测是极具挑战的。然而,机器人的出现改变了这一局面。它们能够克服人类身体的极限,深入到那些曾经遥不可及的深海角落。
近年来,科学家们研发出了多种类型的深海监测机器人。其中,自主式水下航行器(AUV)是最为常见的一种。这些小巧而灵活的机器人可以携带各种传感器和监测设备,按照预设的路线或者根据环境自主调整航行轨迹,收集大量的深海数据。
通过机器人的监测,我们对深海的地形地貌有了更清晰的认识。以往,我们对深海地形的了解主要依赖于声纳技术,但这种方法存在一定的局限性。而机器人携带的高清摄像机和高精度测绘仪器,能够为我们提供更为精确和详细的海底地形图像。例如,在某些深海区域,机器人发现了巨大的海底峡谷和神秘的海底火山,这些地形特征对于我们理解地球的地质演化过程具有重要意义。
在深海生态环境监测方面,机器人也发挥了巨大的作用。它们可以拍摄到深海生物的生活状态,让我们看到了那些从未见过的奇特生物。有些机器人还能够采集深海生物样本,为生物学家提供了宝贵的研究材料。通过对这些样本的分析,我们发现了一些新的物种,同时也对深海生态系统的结构和功能有了更深入的了解。
机器人还帮助我们监测深海的化学环境。深海中的化学物质分布和变化对于全球气候变化和海洋生态平衡有着重要的影响。机器人携带的化学传感器可以实时检测深海中的溶解氧、酸碱度、营养盐等化学指标。最新的研究发现,在一些深海热液口附近,存在着独特的化学物质循环模式,这对于我们理解地球的化学演化和生命的起源都具有重要的启示。
此外,机器人在深海环境监测中的应用还促进了多学科的交叉融合。海洋学家、地质学家、生物学家、气象学家等不同领域的专家通过对机器人收集的数据进行综合分析,共同探索深海的奥秘。这种跨学科的合作不仅推动了深海科学的发展,也为解决全球环境问题提供了新的思路和方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
探测型自主水下航行器(AUV)
船艇l\tHi.羞il
2.5万吨级无人机舱散货船下水
浙江新乐造船有限公司为意大
利罗密欧集团建造的2.5万吨级全
自动化无人机舱散货船"奥里科诺"
号顺利下水.标志着该公司"无人
机舱"技术又迈上了一个新台阶
"奥里科诺"号是新乐造船公
司为意大利罗密欧集团打造的6艘
2.5万吨级散货船中的首制船该
船长157米,型宽24.8米,型深
l3.7米,吃水9.8米,载重量2.5
万吨,续航力6000海里该船采
用全自动化"无人机舱"技术.并
通过了世界上最权威的十大船级社
之一法国船级社(BV)的产品质
量认证.具有很高的技术含量
(象山)
大型船用齿轮箱填补国内空白
杭州前进齿轮箱集团股份有限
公司生产的具有世界先进水平,填
补了国内空白的大型船用齿轮箱,
属船舶动力推进系统的传动装置.
不仅具备减速,离合,承受螺旋桨
推力的功能.最重要的是具备辅助
功率输出(Fro)和辅助功率输入
(I)的功能,可满足法国船级社
船检无人机舱的要求.该齿轮箱可
用于交通运输船舶和远洋捕捞船舶. 该齿轮箱由电力控制,液压操
纵.拥有离合,减速功能的离合器
系统和齿轮传动系统,首次在齿轮
箱上同时实现了PTO/PTI功能.可使螺旋桨获得最佳推进效率.实现
船舶前进与后退的自动化控制.其
辅助功率输入可在主机发生故障时.实现船舶应急返航的功能:辅
助功率输出可在需要时进行发电, 供船舶使用.该齿轮箱既可当发电
机使用,又可当发动机使用.
该齿轮箱速比大,适应范围
广.并首次安装了液位报警器,使
其性能更加安全可靠该齿轮箱采
16l军民两用技术与产品2oo9-12
用双联泵.简化了液压系统的设计. 减少了故障发生的可能性该齿轮
箱具有五种工作状态.可靠性高,
产品已销往法国.各项技术指标全
部符合要求.已向国家知识产权总
局申请了发明专利权.(国际)
德国MAN柴油机公司瞄准中
国的沿海及内河市场.在机械传动
二冲程低速机的基础上.推出两款
新型船用柴油发动机——$35MC—C9型机和S40MC--C9型机
我国沿海及内河船舶的最佳
尺寸为10载重吨~2万载重吨. 推进功率5千瓦~8兆瓦.转速140转/分该两款新型柴油发动
机是在原有机型的基础上设计的.具有运行更加经济,可靠和
操作灵活.大修时间间隔长.重
量轻,配有内置润滑油过滤器.
易于安装等特点
这两款新型船用柴油发动机
可在未来几十年内保持市场领先地位(W.GC)
探测型自主水下航行器(AUV)
国际海底工程有限公司(ISE)
向加拿大自然资源部交付了2台探测型自主水下航行器(AUV).
根据联合国公约海洋法(UNC—LOS)第76条的要求.这2台探
测型自主水下航行器将于2010年配置在高纬度北极
圈地区绘制海底地
图.以支持加拿大
的土地开垦因此.
加拿大成为世界上
首个采用探测型自
主水下航行器考察
北极圈海底的国家
这种探测型自主水下航行器
是为自主探测深度达5000米以
下的北极冰架设计的该自主水下航行器将利用随身携带的声纳系统收集海底数据.执行一次任务可航行450千米.iw.GJ)。