力、力矩、压力测量
压力测量方法
压力测量方法
压力测量方法:
①弹性力平衡法:利用弹簧管、波纹管、膜片等弹性元件受压变形与其内部应力平衡关系,通过测量变形量间接测压;
②重力平衡法:如活塞式压力计,通过平衡被测压力与砝码重力,以砝码质量表示压力;液柱式压力计则利用液柱高度反映压力大小;
③机械力平衡法:将压力转化为可测量的机械力,如杠杆、扭力管等结构,通过平衡外加力确定压力值;
④物性测量法:基于压力改变导致电学、光学、声学等物理特性变化原理,如电气式(压阻、电容)、振频式、光纤式、集成传感器等进行压力测量。
电路各章习题及答案
各章习题及答案第一章绪论1 .举例说明什么是测控?答:(1) 测控例子:为了确定一端固定的悬臂梁的固有频率,我们可以采用锤击法对梁进行激振,再利用压电传感器、电荷放大器、波形记录器记录信号波形,由衰减的振荡波形便可以计算出悬臂梁的固有频率。
(2)结论:由本例可知:测控是指确定被测对象悬臂梁的属性—固有频率的全部操作,是通过一定的技术手段—激振、拾振、记录、数据处理等,获取悬臂梁固有频率的信息的过程。
2. 测控技术的任务是什么?答:测控技术的任务主要有:通过模型试验或现场实测,提高产品质量;通过测控,进行设备强度校验,提高产量和质量;监测环境振动和噪声,找振源,以便采取减振、防噪措施;通过测控,发现新的定律、公式等;通过测控和数据采集,实现对设备的状态监测、质量控制和故障诊断。
3. 以方框图的形式说明测控系统的组成,简述主要部分的作用。
测控系统方框图如下:(2)各部分的作用如下:●传感器是将被测信息转换成某种电信号的器件;●信号的调理是把来自传感器的信号转换成适合传输和处理的形式;●信号处理环节可对来自信号调理环节的信号,进行各种运算、滤波和分析;●信号显示、记录环节将来自信号处理环节的信号显示或存贮。
●模数(A/D)转换和数模(D/A)转换是进行模拟信号与数字信号相互转换,以便用计算机处理。
4.测控技术的发展动向是什么?传感器向新型、微型、智能型方向发展;测控仪器向高精度、多功能、小型化、在线监测、性能标准化和低价格发展;参数测量与数据处理向计算机为核心发展;5. A precise optional signal source can control the output power level to within 1%. A laser is controlled by an input current to yield the power output. A microprocessor controls the input current tothe laser. The microprocessor compares the desired power level with a measured signal proportional to the laser power output obtained from a sensor. Complete the block diagram representing thisclosed-loop control system shown in Fig E1.1, identifying the output, input, and measured variables and the control device.答:6. many luxury automobiles have thermostatically controlled air-conditioning system(恒温空调系统)for the comfort of the passengers. Sketch a block diagram of an air-condition temperature on a dashboard panel(仪表盘). Identify the function of each element of the thermostatically controlled cooling system.答:7. In the past, control systems used a human operator as part of a closed-loop control system. Sketch the block diagram of the valve control system shown in Fig. P1.2.答:8. The student-teacher learning process is inherently a feedback process intended to reduce the system error back model of the learning process and identify each block of the system.答:9. Automatic control of water level using a float level was used in the Middle East for a water clock. The water clock was used from sometime before Christ until the seventeenth century. Discuss the operation of the water clock, and establish how the float provides a feedback control that maintains the accuracy of the clock. Sketch a block diagram of the feedback system.答:第二章信号与系统分析基础1求周期方波的傅立叶级数(复指数函数形式),画出|c n|-ω和ϕ-ω图。
计量领域的“十大计量”
一二三四五计量领域的“十大计量”简介 计量是指实现单位统一、量值准确可靠的活动,是当代经济发展必须支撑的条件,是信息化的基础。
根据被测物理量的分类,可以分为长度计量、热工计量、力学计量、电磁计量、无线电计量、时间频率计量、声学计量、光学计量、化学计量、电磁辐射计量十大计量。
十大计量之长度计量 长度计量是对物体几何量的测量技术,包括:线纹、端度、平面度、角度、粗糙度、渐开线样板等。
生活中常用到直尺、钢卷尺,在军事和交通中广泛应用的卫星定位系统等,都是长度计量的研究成果。
十大计量之热工计量(温度计量) 热工计量利用各种物质的热效应来测量温度的计量技术。
包括:热电偶、热电阻、水银温度计、红外温度计、温度灯、温度仪表及自动测控装置、温度巡检仪、热象仪等。
十大计量之力学计量 力学计量是涉及质量、力值、密度、容量、力矩、机械功率、压力、真空、流量以及位移、速度、加速度、硬度等量的测量。
包括:质量、容量、流量、粘度、密度、真空、力值、硬度、重力、力矩、压力、转速、振动、冲击等。
如市场上的公平秤、电子计价秤、水表、燃气表、出租车计价器等准确与否都是由力学计量来保证的。
十大计量之电磁计量 电磁计量是根据电磁基本原理,应用各种电磁标准器和电磁仪表,对各种电磁物理量进行测量。
包括直流和交流的阻抗和电量、精密交直流测量仪器仪表、模数/数模转换技术、磁通量、磁性材料和磁记录材料、磁测量仪器仪表以及量子计量等。
近年来,变频调速技术的快速发展,变频测量仪器仪表的计量达到新的要求,变频测量仪器仪表的计量法规以及法定单位滞后于变频调速技术的发展,导致变频计量混乱的局面。
随着《JJF 1559-2016变频电量分析仪校准规范》、《JJF 1558-2016测量用变频电量变送器校准规范》的发布以及国家变频电量计量站正式挂牌成立,变频测量仪器仪表的计量得以规范。
十大计量之无线电计量 无线电计量指无线电技术所用全部频率范围及电气特性的测量。
施工测量有哪些方法
施工测量有哪些方法施工测量是指在工程施工过程中,通过测量手段获取各种工程量和相关信息的过程。
施工测量是一项重要的技术活动,它为工程施工提供了准确、可靠的数据支持,并对工程的质量、进度和成本等方面起着至关重要的作用。
下面将介绍一些常见的施工测量方法。
一、线路控制测量线路控制测量是指对工程施工中的控制线路进行测量,以确定施工中各种线路的位置、方位和高程等参数。
线路控制测量主要包括水平线测量、垂直线测量和高程控制等内容。
水平线测量通常采用全站仪、经纬仪、水准仪、GPS等仪器进行,通过测量线路上一系列控制点的水平位置,确定线路的线形和方位参数。
垂直线测量主要是通过水准仪等仪器,测量线路上各点的高程,并进行相应的修正和调整,以保证施工中的高程控制精度。
二、尺度测量尺度测量是指对工程施工中各种构筑物、设备和构件的尺度进行测量,以确定其大小和形状,主要包括长度测量、角度测量、形位测量和三维测量等内容。
长度测量是通过测量工具,如卷尺、测距仪、全站仪等,对工程施工中各种线段、间距、跨度等进行测量,以确定其长度。
角度测量是通过测量仪器,如经纬仪、全站仪等,对工程施工中各种角度和方位进行测量,以确定其大小和方向。
形位测量是通过测量仪器,如测量软件等,对工程施工中各种构筑物、设备和构件的形状和位置进行测量,以确定其形位误差和调整量。
三维测量是指对工程施工中各种物体的三维坐标进行测量,以确定其空间位置和形状。
三维测量通常采用全站仪、激光测距仪、GPS等仪器进行,通过测量物体上一系列控制点的三维坐标,确定物体的三维位置。
三、载荷测量载荷测量是指对工程施工中的载荷进行测量,以确定施工中各种载荷的大小和位置等参数。
载荷测量主要包括荷载测量、压力测量、力矩测量和变形测量等内容。
荷载测量是通过测量仪器,如称重传感器、拉压力传感器等,对工程施工中的荷载进行测量,以确定其大小和分布等参数。
压力测量是通过测量仪器,如压力传感器、液位计等,对工程施工中的压力进行测量,以确定其大小和分布等参数。
弹性敏感元件 标准
垂链式膜片的结构及其简化模型,如图所示。其环形槽部分刚度系数减小,它相当于弹簧系统,硬中心(工作区)相当于刚性圆板。垂链式膜片在电容及压电式传感器中作为感压膜片,由于其工作区运动接近于平移运动,所以效果较平膜片优越。
垂链式膜片的特点可归纳为:
①膜片的位移,由于中心与边缘相差很小,硬中心有效宽度部分接近平移区;
1.结构:空心或实心圆柱体
2.特性:在外力作用下,以应变(相对形变)作为输出量。
3.用途:大力测量(0.1吨――数千吨)
悬臂梁
1.结构:一端固定、一端自由的条形弹性元件,分等截面和等强度(变截面)两种。
2.特性:以应变或位移作为输出量。
等截面悬臂梁沿长度方向应变不均匀,根部最大,梢部为0。
等强度悬臂梁(变截面)沿长度方向应变均匀。
(1)梁式弹性元件
一、等截面悬臂梁
二、等强度悬臂梁
由于等强度梁的显著特点,即在梁的各点处的应变相等,用它作为力传感器的弹性敏感元件是很方便的,它能在任意位置取出应变值,因此其应用十分广泛。
三、两端固定梁
四、单孔、双孔和S形梁
将梁做成各种形状,可以改变其应力分布并增强刚度,从而进一步完善梁的特性(提高动态特性,增加灵敏度),它们都是利用弯曲变形的弹性元件。
2.4.常用元件
测力元件:实心或空心圆柱体、等截面环、悬臂梁、轴元件等类型
测压力元件:膜片、膜盒、弹簧管、波纹管、薄壁圆筒、薄壁半球等类型
组合元件(元件的串并联):平膜片与悬臂梁组合、波纹膜片与圆筒组合等等根据实际需要来进行。目的是提升工作性能,也可起保护作用。
2.5几种常见弹性敏感元件的特性:
弹性圆柱
②膜片的强度及位移线性度和平膜片相比有较大改善;
全机压力测量风洞试验指导书
一、试验名称:低速风洞全机模型气动力和力矩测量试验二、试验目的及要求通过试验,深化对空气动力学理论的理解,初步掌握空气动力低速风洞试验技术:常规测力试验设备的使用,了解使用工业控制机对风洞风速和模型姿态角控制和信号采集及处理的基本方法。
了解风洞试验数据的修正和处理方法,初步掌握低速风洞测力的空气动力特性的规律和分析方法,试验数据曲线的绘制软件的应用。
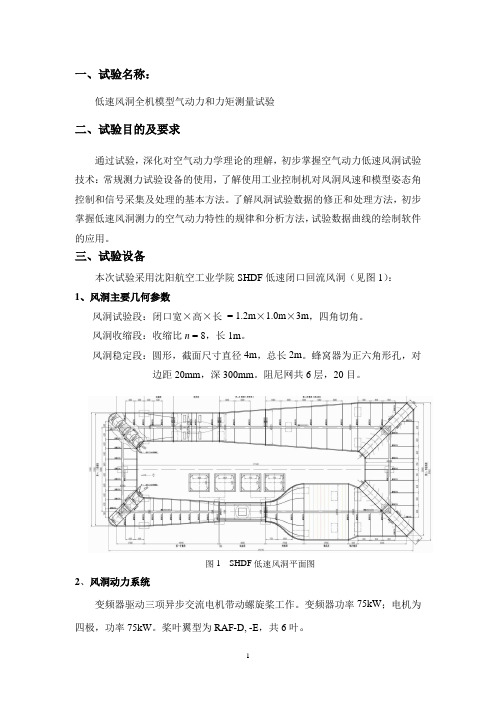
三、试验设备本次试验采用沈阳航空工业学院SHDF低速闭口回流风洞(见图1):1、风洞主要几何参数风洞试验段:闭口宽×高×长= 1.2m×1.0m×3m,四角切角。
风洞收缩段:收缩比n = 8,长1m。
风洞稳定段:圆形,截面尺寸直径4m,总长2m。
蜂窝器为正六角形孔,对边距20mm,深300mm。
阻尼网共6层,20目。
图1 SHDF低速风洞平面图2、风洞动力系统变频器驱动三项异步交流电机带动螺旋桨工作。
变频器功率75kW;电机为四极,功率75kW。
桨叶翼型为RAF-D, -E,共6叶。
3、控制和数据采集系统风洞的控制系统是由计工业控制计算机(研华610H)、风速传感器(DCXL-10D)和变频器(SPF-75)组成,用VB语言开发的控制程序,对风速进行闭环控制,风速的控制精度为±0.2m/s。
模型姿态控制由计算机、步进电机驱动器(BQH-300Y)和步进电机(110BF003)分别带动模型支撑系统(尾撑和腹撑)做垂直面内转动(称为迎角α)。
迎角α转动范围为-15°~+25°,侧滑角由转盘涡轮蜗杆手动控制,β转动范围为-180°~+180°。
由旋转编码器实施测量转动角度。
数据采集系统是通过数据采集处理程序驱动,将杆式应变天平受力(或力矩)变形感应到的电压变化信号和压力传感器输出的电压信号,通过信号调理器(XL 2102E)及高精度稳压电源(XL 2101)对信号进行滤波、放大后,送入12位数据采集卡(PCL-818L)变为数字量,进入计算机中央处理器处理。
力和力矩的区别是什么[管理资料]
力和力矩的区别是什么力矩力使物体转动的效果,不仅跟力的大小有关,还跟力和转动轴的距离有关。
力越大,力跟转动轴的距离越大,力使物体转动的作用就越大。
从转动轴到力的作用线的距离,叫做力臂。
力和力臂的乘积叫做力对转动轴的力矩。
力矩(torque):力(F)和力臂(L)的乘积(M)。
即:M=F·L。
其中L是从转动轴到力的矢量, F是矢量力。
力矩的量纲是距离×力;与能量的量纲相同。
但是力矩通常用牛顿-米,而不是用焦耳作为单位。
力矩的单位由力和力臂的单位决定。
力对物体产生转动作用的物理量。
可分为力对轴的矩和力对点的矩。
力对轴的矩是力对物体产生绕某一轴转动作用的物理量。
它是代数量,其大小等于力在垂直于该轴的平面上的分力同此分力作用线到该轴垂直距离的乘积;其正负号用以区别力矩的不同转向,按右手螺旋定则确定:以右手四指沿分力方向,且掌心面向转轴而握拳,大拇指方向与该轴正向一致时取正号,反之则取负号。
力对点的矩是力对物体产生绕某一点转动作用的物理量。
它是矢量,等于力作用点位置矢r和力矢F的矢量积。
例如,用球铰链固定于O点的物体受力F 作用,以r表示自O点至F作用点A的位置矢,r和F的夹角为a(见图)。
物体在F作用下,绕垂直于r与F组成的平面并通过O点的轴转动。
转动作用的大小和转轴的方向取决于F对O点的矩矢M,M =r×F ;M的大小为rFsina ,方向由右手定则确定。
力矩M 在过矩心O的直角坐标轴上的投影为 Mx 、My 、Mz 。
可以证明 Mx 、My 、Mz 就是F对x ,y,z轴的矩。
力矩的量纲为L2MT -2,其SI单位为N·m。
力力(force)力是物体对另一物体的作用,一个物体受到力的作用,一定有另外的物体施加这种作用。
前者是受力物体,后者是施力物体,只要有力发生,就一定有受力物体和施力物体。
有时为了方便,只说物体受了力,而没有指明施力物体。
但施力物体一定是存在的。
压力测量ppt课件
49
3 测量部分的工作原理
50
§7.5 压力和差压测量仪表的使用 压力(差压)测量系统由被测对象、取压口、导 压管、测量仪表组成。 压力测点位置的选择好坏,信号管(导压管)敷 设正确与否,对压力测量精度具有很大的影响。
1 测压仪表的选用原则 选择测压仪表时需考虑以下方面:
19
1.1构成 变送器是基于负反馈原理工作。
20
测量部分用以检测被测参数x,并将其转换成能被放 大器接受的输入信号Zi(电压、电流、位移、作用 力或力矩等信号)。
反馈部分将变送器输出信号Y转换为反馈信号Zf。 放大器将ε=Zi±Z0-Zf放大、处理为标准信号Y输出。 输出与输入:Y=Kε=K(Zi±Z0-Zf)
15
3 弹性后效 当负荷停止变化(p=p1)或完成卸负荷后(p=0),弹
性元件不是立刻完成相应的变形,而是在一段时 间内继续变形,这张现象称为弹性后效。
16
§7.3 压力(差压)信号的电变送方法
1 变送器 变送器的作用是将各种工艺参数,如温度、压力、
流量、液位等物理量转换成统一的标准信号。
17
18
52
2 取压口的选择 取压口的选择,要考虑测出的压力能真正反映被 测介质的压力,不能有附加的动压头或其它干扰。
取压口要选在管道的直线部分,不能处于流线紊 乱的地方;
取压口的轴线应与被测介质流速方向垂直; 口部与设备内壁平齐,导压管最好不要插入管道 内。 当一定要插入时,管道口平面应严格与流动方向 平行。
1 气动压力(差压)变送器的组成 从结构来看,变送器是由两部分组成:
测量部分:将压力转换成测量力或位移。 转换部分:将测量力或位移转换成标准压力信号。
压力检测方法与仪表
D/A 转换
数字 通信
本机量程和 零点调整
手操器
4~20mA
压力检测措施及仪表
➢压力测量仪表旳选用
•仪表种类和型号旳选择
工艺要求 现场指示、远传指示、自动统计、自动调整或信号报警 介质性质 温度、粘度、脏污程度、腐蚀性、易燃性 现场环境 温度、湿度、有无振动、有无腐蚀性
仪表量程旳拟定 化工自控设计技术规定 被测压力较稳定旳情况,最大压力值应不超过满量程旳
F1
θ
θ
8
F2
F2
l1 l2
APitg
M
副杠杆平衡: F2l3 F0l0 Ff L f
12
l2
lf Ff l0
Ff K f I0
14
5
F0
4
H
l1
Fi
I0
l1l3 Atg P l0
l2l f K f
lf Kf
F0
压力检测措施及仪表
➢压力检测仪表
❖微位移式变送器 (1)测量部分
P1
填充液(硅油)
d——两平行板之间旳距离,m C——电容量,F
压力检测措施及仪表
➢电测压力法
❖压电式测压原理 根据“压电效应”把被测压力变换为电信号旳。
(a)单晶体
(b)剖面图
(c)X截割旳石英片
电荷数
Qx KPx Ax
受力面积
压电常数
作用在受力面积上旳压力
压力检测措施及仪表
➢电测压力法
❖应变片式测压原理
构成
敏感栅 直径为0.025mm左右旳合金电阻
丝
基 底 绝缘
5
覆盖层 保护
位移、力、力矩、 加速度、压力
弹性敏 感元件
力和力矩的测量
力和力矩的测量力的定义:力是物体之间的相互作用。
大小、方向、作用点是力的三要素。
牛顿第二定律表述:动量对时间的变化率。
F dp /d t =国际单位:牛顿,简称牛,符号是N 。
211/N kg m s =⋅力矩定义:位矢和力的叉乘。
物理学上指使物体转动的力乘以到转轴的距离。
力矩单位是牛顿·米(N ·m )对力的测量问题有两种基本方法:(1)直接比较(2)使用标准传感器进行间接比较 直接比较方法利用某种形式的梁式天平,并且使用零位平衡技术。
1 力的测量1.1等臂天平(如图中分析天平,精度可达0.1mg )或非等臂天平。
最简单的重量或力的测量系统。
基于力矩比较原理工作的。
由未知的重量或力产生的力矩,和一个已知量产生的力矩进行比较。
1.2摆式测力机构如摆式秤。
输入量施加到负载杆上,使配重旋转向外移动。
该移动使得配重作用力矩增加,直到负载力矩和摆秤力矩相等。
1.3 弹性传感器很多力传感器系统利用某种机械弹性件或弹性件的组合,对弹性件施加载荷导致一种类似的变形,通常是线性的,然后对该变形直接观察并且用于力的测量,或者使用另一个传感器来将该位移转换成另一种形式的输出,通常是电的形式。
通常要对弹性件进行标定,如调整螺旋弹簧的有效圈数等。
1.4应变片测力计与将总变形用于测量载荷不同的是,应变片测力计根据单位应变来测量负载。
电阻型应变片非常适合于这一用途。
若要测量的是大载荷,可以使用直接拉压型元件。
如果是小载荷,则可通过弯曲来放大应变。
金属电阻应变片的原理:当金属丝或金属箔片被机械地拉长时,导体的长度将变长,截面将变小,因此其电阻发生变化。
如果电阻元件长度紧密附着在发生这样应变的构件上,使得电阻元件也产生应变,那么测出的电阻变化可以根据应变来定标。
金属应变片的应变片因子F 在通常要求的应变范围内基本上是个常数,而由实验确定的应变片因子F 的值,对于一种给定的材料是相当一致的。
1R F Rε∆=在实际应用中,F 和R 的值是由应变片制造商提供的,使用者要根据被测的输入量情况确定R ∆图中所示的拉压型电阻应变片测力计的电桥常数是2(1+u),其中u是材料的泊松比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PV=C(常数)(T不变时)
或
P1V1=P2V2=…=PnVn
利用波义耳定律,将被测真空系统中一定的残余气体 加以压缩,比较压缩前后体积、压力的变化,即能算出真 空度。
P为输入功率,k为单位系数, n为转速,η 为电动机效率
•发电机: P2 / (kn ) P2为输出功率 M
一、传递法测力矩
(1)当力矩作用在弹性轴上,轴会产生扭曲变 形、剪切应变和应力
Ml GI p M I p G / l
Ip
d4
32
G: 材料的切变模量;: 扭转角;IP : 极惯性矩
可 测 很 大负荷, 达 1M 牛 以 上 , 精度1%。
7.2.2 力矩测量
对旋转轴测量力矩,可以确定输出的功也可以监测 剪切应力下的材料失效。 力矩(转矩)测量常常和功率、转速测量联系在一 起。 力所作的功=力×在力方向上的位移 T 每秒所作的功 P=F×2rn= 2 rn 2 nT r 旋转轴所传递的功率 P=2nT=T,= 2n F: 半径 r处的切向力 T: 作用在轴上使其旋转的力矩
现在真空技术在生产、科研中的用途愈来 愈广,在整个真空范围内所采用的测量方 法也是多种多样的。
按测量方法的原理来分可以分为:
基于力的作用原理:U形管,波登管式, 波纹管式,膜片式; 基于压缩作用原理:麦氏真空计; 基于导热作用原理:电阻真空计,热电偶 真空计; 基于电离作用原理:热阴极式,冷阴极式, 放射性真空计。
l F l AE E
Δl-------应变片的总变形
l--------应变片的基长
F------作用力
A------弹性元件的工作面积
E------弹性元件的弹性模量
σ------弹性元件的工作应力
应变片的灵敏度
R1 R3 F k k R1 R3 AE
R / R R / R k l / l
测量扭转角:
测量剪切应力 :
测量轴的应变:
45、135 : 沿着和轴成45o、135o 夹角方向的 主应变。
1.电阻应变式转矩仪 在被测轴上,沿轴线的45。或135。方粘贴应变片, 当转轴受转矩M作用时,应变片产生应变,其应 变量 与转矩M成线性关系。 • 对空心圆柱形轴:
•对方形截面轴: G为转轴的 切变模量
测量范围: 20 Pa to 140KPa
精度: 1%.
• 温度影响--------液体的膨胀
m V0 0 V ---实际温度 V V0 (1 r ) r 液体的体积膨胀系数
h 0 g P gh 1
0V0 0 V 1
R2 R4 F k k R2 R4 AE
----弹性元件的泊松系数
弹性体的总应变:
2(1 ) 0 1 2 3 4 F AE
U R1 R2 R3 R4 U U 0 ( ) k (1 2 3 4 ) 4 R R R R 4
7.2 测量方法 7.2.1 力的测量方法
(1) 根据静力或动力效应
静力效应---- 测量物体的机械变形或利用与力有 关的物理效应; 动力效应--- 根据牛顿第二定律:F=ma
(2)根据不同的结构和仪器来划分 1. 力平衡的方法(Force balance methods )
物体处于静态平衡时,绕某一轴线的顺时针 方向的力矩等于逆时针方向的力矩。
Fmax max 19.8mm
悬臂梁
Applied force
测力环
电阻应变式测力仪原理框图
其他测力的方法
(1) 压电式测力仪
利用压电材料(石英晶体、压电陶瓷)的压电效应,将被测力 转换为与其成正比的电荷量输出; 石英晶体:性能稳定、动态响应好,机械强度高,线性范围 宽,多用于高精度高大量程测量, mN~MN。 压电陶瓷:压电常数远高于压电晶体,价格便宜,用途广泛
1、 电感式(磁阻式)弹性压力计 ( Reluctance diaphragm gauge )
N 0 s0 L 2
2
L 2 L0
L L0
2、电容式弹性压力计
C
A
d0
C d 2 C d0
根据压力类型的不同可测绝对压力或差压。
式中,E为弹性膜片的弹性模量;u为材料的 泊松比
kn: 超载系数
Fmax Fmax max= ,A A kn
•强度校核或弹性体截面设计
例题:电压灵敏度1mV/V,负荷力50KN,应变 片灵敏度系数k为2, 求正方形截面的柱式弹性 体的截面尺寸。
U 0 Ui 1mV / V , k 2; 0 2 10 , 0.3, 实=0.769
倾斜式压力计(The inclined tube manometer )
P1 H h
A2 A2 P P2 ( 1)d g ( 1) gx sin 1 A1 A1 A2<<A1,可近似为:
P2
d
x
起始液面没有压 力差
P P2 gx sin 1
二、弹性式压力计(Diaphragms)
3
强度校核: 弹性材料为40Cr,E=2.1 10 MPa, s 785.1MPa;
5
E 实=161MPa, max k n 1.2 161 193Mpa
尺寸确定: max a Fmax A , Fmax 1.2 ~ 1.5 F
s
3
261.7 MPa
(1)液柱式真空计
最简单的真空计。 U形管中盛上水银, 一端 接真空系统,另一端为大 气。随着系统中真空度的 升高,U形管真空侧的液 面在大气作用下随之上升。
真空度p=pa-h,其中p为 系统中真空度,pa为大气 压值,h为两液面之差。
(2) 压缩式真空计
玻义耳-马略特定律
对于一定质量的气体,在其温度保持不变时,它的压 强和体积成反比。
根据弹性元件受力变形原理并利用机械结构将 变形量放大。
波顿管(Bourdon tubes)
三、负荷式压力计(force balance gauge)
提供做压力基准器 校准压力表:20Pa~ 2000kPa
• 基于静力平衡原 理进行压力测量
Mg P A
被校准压力表安装上后, 转动手轮,使油压系统 压力升高,直到活塞被 顶起。
Mg P A
M:砝码质量 A:活塞有效面积
四、电测式压力测量仪表
利用金属或半导体的物理特性将压力转换为电压、电 流信号或电荷信号输出,或是将弹性体的形变转换为 电阻量、电容量、电感量、频率量等电学量输出。 类别:压电式、压阻式、应变式、电感式、电容式等。 精确度可达0.02级,测量范围从数十帕至700兆帕不 等。
槽式压力计(Cistern manometer)
P2
P1A1ຫໍສະໝຸດ hHd A2
P1 P2 gH (h d ) g A1h A2 d A2 d A2 P1 P2 ( d ) g ( 1)d g A1 A1 cdg
•只 需 测 量 一 边液面的变化
Q dij F
dij: 压电常数 主要用于动态力测量
•多分量式
压磁式测力仪(Piezomagnetic dynamometry)
压磁效应:工业纯铁、硅钢等铁磁材料在机械力的作用下磁导 率发生变化; 硅钢受压缩时,其导磁率沿应力方向下降,而沿应力的垂向增 加;在受拉伸时,导磁率变化正好相反。
U 0 F kU i N1 / N 2
7.2.3 真空测量 (vacuum measurement)
真空:小于大气压力的压力。即低于
1.013×105 Pa的压力。
工程应用中,常采用单位:托(torr)。
1mmHg=133.322Pa=1 torr
绝对压力越低,真空度越高。
真空划分(10-12~105)
• 粗真空 103~105Pa • 低真空103~10-1Pa • 高真空10-1~10-6Pa • 超高真空10-6~10-12Pa • 极高真空<10-12Pa
力、力矩、压力测量
7.1 概念 7.1.1 力
(1)什么是力?
力是物体之间的相互作用。各种机械运动是力 或力矩传递的结果,因此力是最重要的物理量 之一;
力的动力效应:力改变物体的机械运动状态;
力的静力效应:造成物体的变形。
(2)力矩、扭矩、转矩(torque )
力矩是力和力臂的乘积。 力矩能使物体转动,也称为转矩。
– U形管(U-tube manometer)
– 槽式压力计( The cistern manometer ) – 倾斜式U形管(The inclined tube manometer) 2. 弹性式压力计(Diaphragms) – 波顿管(Bourdon tubes)
3、 力平衡式(Force-balance )
对于一个旋转轴,转矩 T= F×r,F是在半 径r处的切向力。 轴在转矩作用下会发生扭曲变形,材料内 部会产生剪切应力和应变,也称为扭矩。
(3)压力 垂直作用于单位面积上的力 P=F/A 单位 : 帕斯卡(Pa)
1Pa=1N/m2 大气压力: 由于大气重力,包围地球的大气对单位 面积的地球表面施加的压力。简称气压。它随天 气情况,海拔高度和纬度而变。
精度高±(0.2-0.5)%,重复性好,测量范围宽 5~50000N· m
2、相位差式转矩测量仪
z
2 z 10 ~ 100
θ 为两齿轮的 相对转角 z为齿数
测量范围可达0.2-105 N· m,精度±(0.1-0.2)%
二、力平衡法测力矩
利用平衡力矩M0去平衡被测力矩M,从而求得M的方法。