开关磁阻电机的原理及其控制系统样本
开关磁阻电机的原理及其控制系统
开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。具有结构简单、运行可靠、成本低、效率高等突出优点, 当前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理
开关磁阻电机的工作原理遵循磁磁阻最小原理, 即磁通总是要沿着磁阻最小路径闭合。因此, 它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。因此开关磁阻电动机采用凸极定子和凸极转子的双凸极结构, 而且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。定、转子铁芯均由硅钢片冲成一定形状的齿槽, 然后叠压而成, 其定、转子冲片
的结构如图1所示。
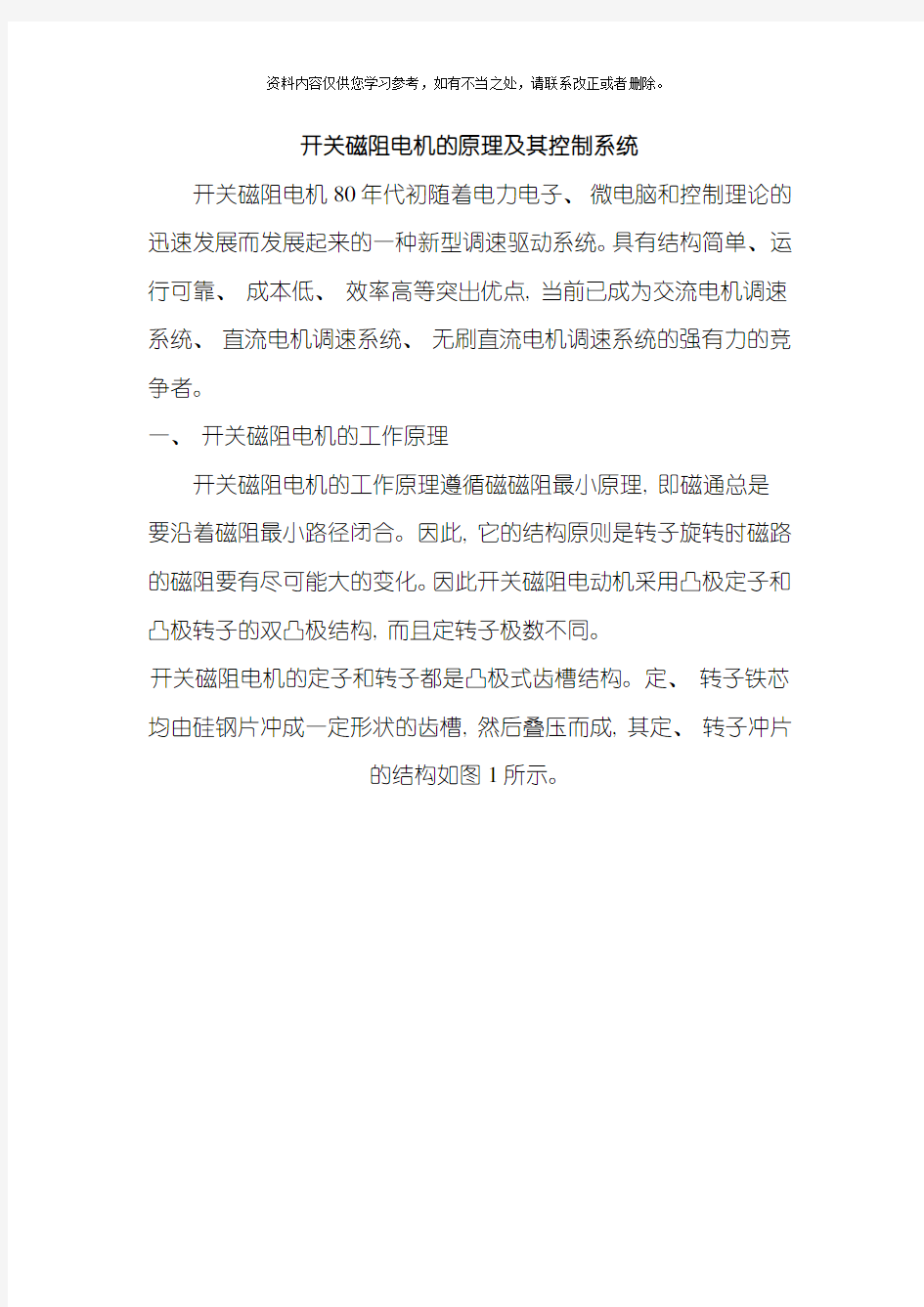
图1: 开关磁阻电机定、转子结构图
图1所示为12/8极三相开关磁阻电动机, S1. S2是电子开关, VD1, VD2是二极管, 是直流电源。
电机定子和转子呈凸极形状, 极数互不相等, 转子由叠片构成, 定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场, 转子带有位置检测器以提供转子位置信号, 使定子绕组按一定的顺序通断, 保持电机的连续运行。电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化, 因为电感与
磁阻成反比, 当转子磁极在定子磁极中心线位置时, 相绕组电感最大, 当转子极间中心线对准定子磁极中心线时, 相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时, 开关S1, S2合上, A相绕组通电, 电动机内建立起以OA为轴线的径向磁场, 磁通经过定子扼、定子极、气隙、转子极、转子扼等处闭合。经过气隙的磁力线是弯曲的, 此时磁路的磁导小于定、转子磁极轴线重合时的磁导, 因此, 转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用, 使转子逆时针方向转动, 转子磁极的轴线O1向定子A相磁极轴线OA趋近。当OA和O1轴线重合时, 转子己达到平衡位置, 即当A相定、转子极对极时, 切向磁拉力消失。此时打开A相开关S1, S2, 合上B相开关, 即在A相断电的同时B相通电, 建立以B相定子磁极为轴线的磁场, 电动机内磁场沿顺时针方向转过300, 转子在磁场磁拉力的作用下继续沿着逆时针方向转过15,。依此类推, 定子绕组A-B-C三相轮流通电一次, 转子逆时针转动了一个转子极距Tr(T.=2π/N,), 对于三相12/8极开关磁阻电机, T=3600/8=o
45, 定子磁极产生的磁场轴线则顺时针移动了3×30'=90'空间角。可见, 连续不断地按A-B-C-A的顺序分别给定子各相绕组通电, 电动机内磁场轴线沿A-B-C-A的方向不断移动, 转子沿A-C-B-A的方向逆时针旋转。如果按A-C-B-A的顺序给定子各相绕组轮流通电, 则磁场沿着A-C-B-A的方向转动, 转子则沿着与之相反的A-B-C-A方向顺时针旋转。
二、开关磁阻电机的控制原理
传统的PID控制一方面参数的整定没有实现自动化, 另一方面这种控制必须精确地确定对象模型。而开关磁阻电动机( SRM) 得不到精确的数学模型, 控制参数变化和非线性, 使得固定参数的PID 控制不能使开关磁阻电动机控制系统在各种工况下保持设计时的性能指标。
模糊控制器是一种近年来发展起来的新型控制器, 其优点是
不需要掌握受控对象的精确数学模型, 而根据人工控制规则组织
控制决策表, 然后由该表决定控制量的大小。因此采用模糊控制, 对开关磁阻电动机( SRM) 进行控制是改进系统性能的一种途径。但在实践中发现, 常规模糊控制器的设计存在一些不足, 如控制表中数据有跳跃, 平滑性较差, 这对控制效果有影响。
模糊控制和PID控制两者结合起来, 扬长补短, 将是一个优秀的控制策略。其理由是:
第一, 由线性控制理论可知, 积分控制作用能消除稳态误差,
但动态响应慢, 比例控制作用动态响应快, 而比例积分控制既能获得较高的稳态精度, 又能具有较高的动态响应。因此, 把PI 控制策略引入Fuzzy控制器, 构成Fuzzy- PI 复合控制, 是改进模糊控制器稳态性能的一种途径。
第二, 增加模糊量化论域是提高模糊控制器稳态精度的最直
接的方法, 但这种方法要增大模糊推理的计算量, 况且量化论域的增加也不是无止境的。
采用模糊+ PI控制的开关磁阻电机调速系统框图如图2所示。
图2: 开关磁阻电机调速系统框图
1、隶属函数与控制规则的确定
考虑到电机转速偏差范围大及高精度的特点, 将偏差变量、偏差变化率及控制量的论域界均定为17个等级。
{-8,-7,-6, -5,-4,-3, -2,-1,0,1,2,3,4,5,6,7,8}
将偏差变量、偏差变化率及控制量的模糊语言值均分为九档{负大,负中,负小,负很小,零,正很小,正小,正中,正大}
{NB, NM, NS, NVS, ZO, PVS,PS,PM,PB}
偏差变量、偏差变化率及控制量的模糊子集的隶属函数的形状均选为三角形如图3所示。
图3: 均匀分布隶属函数图
模糊控制器的控制规则是基于专家或操作者的经验得出, 控制规则的生成方法有很多。本文借鉴常规模糊控制器设计经验并根据系统阶跃信号的响应确定模糊控制规则表如表1所示:
表1: 改进的模糊控制规则表
表中共有81条控制规则, 其中一些规则能够合并, 但利用计算机进行推理计算这些规则就没有必要合并了。模糊控制规则表征了变量之间的模糊关系, 由控制规则求出模糊关系矩阵R, 经过推理合成得到模糊控制向量。系统采用加全平均法实现模糊判决求得精确量的控制表如表2所示。