基于Matlab异步电动机矢量控制系统的仿真
基于Matlab转差频率控制的
矢量控制系统的仿真
概述:
常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。其中,矢量控制是目前交流电动机较先进的一种控制方式。它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统
由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁
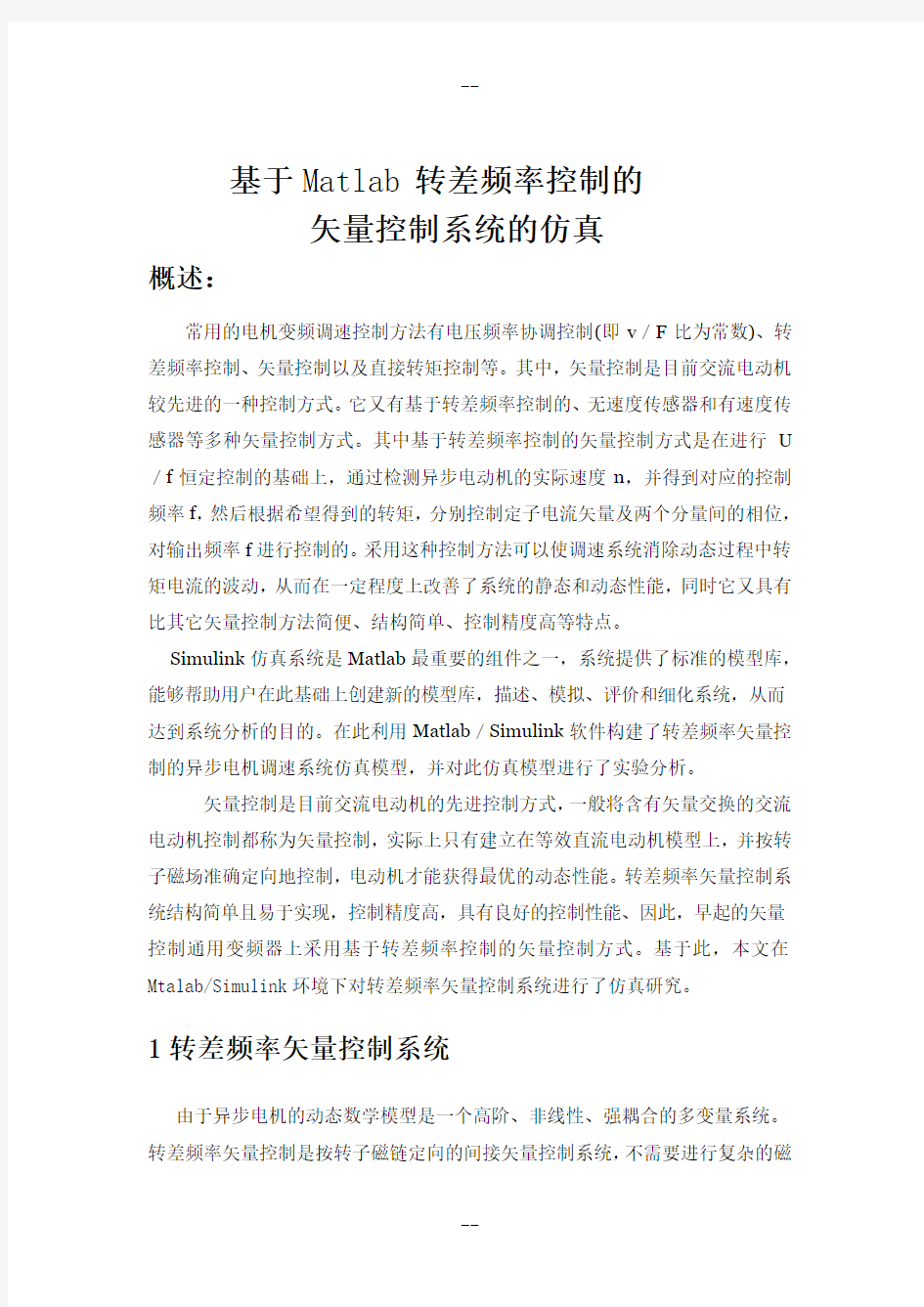
通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。其控制的基本方程式如下:
u sa R s+L s P 0L m P 0 i sa
u sb = 0 R s+L s P 0 L m P i sb
u ra L m P ωL m R r+L r P ωL r i ra
u rb -ωL m -L m -ωL r R r+L r P i rb
式中:u sa,u sb,u ra,u rb为定、转子在M-T轴上的电压分量;L s为定子自感;L r为转子自感;L m为定、转子互感;ω1为定子角频率、ωs为转差角频率;P为微分算子;R s,R r为定、转子电阻。
磁链方程为:
ψsa L s0L m0 i sa
ψsb = 0 L s 0 L m i sb
ψra L m P ωL m R r+L r P ωL r i ra
ψrb 0 L m 0L r i rb
式中:ψsa,ψra 为定、转子磁链励磁分量;ψsb,ψrb为定、转子磁链转矩分量;
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。鉴于电机参数有可能发生变化,会影响变频器对电机的控制性能,目前新型矢量控制通用变频器中已经具备异步电动机参数自动检测、自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
以异步电动机的矢量控制为例:
它首先通过电机的等效电路来得出一些磁链方程,包括定子磁链,气隙磁链,转子磁链,其中气息磁链是连接定子和转子的。一般的感应电机转子电流不易测量,所以通过气息来中转,把它变成定子电流。
然后,有一些坐标变换,首先通过3/2变换,变成静止的d-q坐标,然后通过前面的磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量,这样就实现了解耦控制,加快了系统的响应速度。
最后再经过2/3变换,产生三相交流电去控制电机,这样就获得了良好的性能。
矢量控制(VC)方式:
矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1和Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
综合以上:矢量控制无非就四个知识:等效电路、磁链方程、转矩方程、坐标变换(包括静止和旋转)。
矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。2转差频率控制的基本原理
调速系统的动态性能主要取决于其对转矩控制能力。由于直流电动机的转矩与电流成正比关系,控制电流即可控制转矩控制,较易实现,而交流异步电动机的转矩控制比真流电动机要复杂。转差频率矢量控制的目标就是将交流电动机复杂的转矩控制模型转化为类似直流电动机的简单转矩控制模型。从原理上说,矢量控制方式的特征是:它把交流电动机解析成与直流电动机一样,具有转矩发生机构,按照磁场和其正交的电流的积就是转矩这一最基本的原理,从理论上将电
动机的一次电流分离成建立磁场的励磁分量和与磁场正交的产生转矩的转矩分量,然后分别进行控制。
2.1 控制原理叙述
转差频率控制控制思想就是从根本上改造交流电动机,改变其产生转矩的规律,设法在普通的三相交流电动机上模拟直流电动机控制转矩的规律。
异步电动机的基本方程式为:
M L L i r
m r r ψ=1 (1) st r r m s i T L ψ=
? (2) r m
r m L P T i ψ+=11 (3) T e =n P r
r St m L i L ψ (4) r ψ=1
+p r Sm m T i L (5) 式中:r i 1、m i 1分别为转子电流的转矩分量和励磁分量;m L 、r L 分别为定、转子电感;r ψ为转子总磁链;s ω为转差角频率;r T 为转子时间常数;e T 为电磁转矩;p n 为异步电动机的磁极对数;P 为微分算子;m L 1为定子绕组漏感。
任何电气传动控制系统均服从以下基本运动方程:
dt
d n J T T p L
e ?=- (6) 式中L T 为负载转矩,J 为电动机转子和系统的转动惯量。
由式(6)可知,要提高系统的动态特性,主要是控制转速的变化率
dt d ω。显然,通过控制e T 就能控制dt
d ω,因此调速的动态特性取决于其对
e T 的控制能力。 电动机稳态运行时,转差率s 很小,因此s ω也很小,转矩的近似表达式为:
'2
2
R K T s m m e ?Φ≈ (7)
式中:m K 为电动机的结构常数,m Φ为气隙磁通,'2R 为折算到定子边的转
子电阻。
只要能够保持m Φ不变,异步电动机的转速就与s ω近似成正比,即控制s ω就能控制e T ,也就能控制dt
d ω,与直流电动机通过控制电流即可控制转矩类似。 控制转差频率就代表控制转矩,这就是转差频率控制的基本概念。
把转矩特性(即机械特性):)(s e f T ω=画在下图中:
图2-1 按恒Φm 值控制的 T e =f (ωs ) 特性
可以看出:在ωs 较小的稳态运行段上,转矩 T e 基本上与ωs 成正比,当T e 达到其最大值T emax 时,ωs 达到ωsmax 值。
由相关公式可以得到:
'r
'r max s l L R =ω (8) 'r
2m m
max e 2l L ΦK T = (9) 在转差频率控制系统中,只要给ωs 限幅,使其限幅值为:r
r max s sm l L R =
<ωω , 就可以基本保持 T e 与ωs 的正比关系,也就可以用转差频率控制来代表转矩控制。这是转差频率控制的基本规律之一。
上述规律是在保持Φm 恒定的前提下才成立的,于是问题又转化为,如何能
保持Φm 恒定?我们知道,按恒 E g /ω1 控制时可保持Φm 恒定。在等效电路中可得:
11g s 1s s g s 1s s s )()(ωωωω???
? ??++=++=E L j R I E L j R I U l l (10) 由此可见,要实现恒 E g /ω1控制,须在U s /ω1 = 恒值的基础上再提高电压 U s 以补偿定子电流压降。
如果忽略电流相量相位变化的影响,不同定子电流时恒 E g /ω1 控制所需的
电压-频率特性 U s = f (ω1, I s )。
总结起来,转差频率控制的规律是:
(1)在 ωs ≤ ωsm 的范围内,转矩 T e 基本上与 ωs 成正比,条件是气隙磁
通不变。
(2)在不同的定子电流值时,按函数关系 U s = f (ω1 , I s ) 控制定子电压
和频率,就能保持气隙磁通Φm 恒定。
2.2 转差频率控制系统组成
频率控制——转速调节器ASR 的输出信号是转差频率给定 ωs * ,与实测转速信
号ω 相加,即得定子频率给定信号 ω1* ,即*1*s ωωω=+
电压控制——由 ω1和定子电流反馈信号 I s 从微机存储的 U s = f (ω1 , I s ) 函数中查得定子电压给定信号 U s * ,用 U s * 和 ω1* 控制PWM 电压型逆变器,即得
异步电机调速所需的变压变频电源。
公式*1*s ωωω=+所示的转差角频率 ωs *与实测转速信号ω 相加后得到定子
频率输入信号 ω1* 这一关系是转差频率控制系统突出的特点或优点。它表明,在
调速过程中,定子频率ω1随着转子转速 ω 同步地上升或下降,有如水涨而船高,
因此加、减速平滑而且稳定。同时,由于在动态过程中转速调节器ASR 饱和,系统能用对应于 ωsm 的限幅转矩T em 进行控制,保证了在允许条件下的快速性。
由此可见,转速闭环转差频率控制的交流变压变频调速系统能够像直流电机双闭环控制系统那样具有较好的静、动态性能,是一个比较优越的控制策略,结构也不算复杂。然而,它的静、动态性能还不能完全达到直流双闭环系统的水平,存在差距的原因有以下几个方面:
(1)在分析转差频率控制规律时,是从异步电机稳态等效电路和稳态转矩
公式出发的,所谓的“保持磁通 Φm 恒定”的结论也只在稳态情况下才能成立。
在动态中 Φm 如何变化还没有深入研究,但肯定不会恒定,这不得不影响系统的
实际动态性能。
(2)U s = f (ω1 , I s ) 函数关系中只抓住了定子电流的幅值,没有控制到
电流的相位,而在动态中电流的相位也是影响转矩变化的因素。
(3)在频率控制环节中,取*1*s ωωω=+,使频率得以与转速同步升降,这本是转差频率控制的优点。然而,如果转速检测信号不准确或存在干扰,也就会直接给频率造成误差,因为所有这些偏差和干扰都以正反馈的形式毫无衰减地传递到频率控制信号上来了。
3、转差频率矢量控制系统构建
转差频率控制的异步电动机矢量控制调速系统的原理图如图3-1所示。该系统主电路采用了SPWM 电压型逆变器,这是通用变频器常用的方案。转速采用了转差频率控制,即异步机定子角频率ω1由转子角频率ω和转差角频率ωs 组成(ω1=ω+ω),这样在转速变化过程中,电动机的定子电流频率始终能随转子的实际转速同步升降,使转速的调节更为平滑。
图3-1转差频率控制的矢量控制系统原理框图
系统的控制部分由给定、PI 调节器、函数运算、二相/三相坐标变换、PWM 脉冲发生器等环节组成。其中给定环节有定子电流励磁分量im*和转子速度n*。
放大器G1、G2和积分器组成了带限幅的转速调节器ASR 。电流电压模型转换由函数Um*、Ut*模块实现。函数运算模块ws*根据定子电流的励磁分量和转矩分量计算转差ωs ,并与转子频率ω想加得到定子频率ω1,再经积分器得到定子电压
矢量转角θ。模块sin 、cos 、dq0/abc 实现了二相旋转坐标系至三相静止坐标系的变换。dq0/abc 是输出是PMW 发生器的三相调制信号,因为调制信号幅度不能大于1,在dq0/abc 输出后插入衰减环节G4。在模型调试时,可以先在此处断输出和PMW 发生器的三相调制输入信号幅值小于1的要求,计算G4的衰减系数。
该系统的主要特点:
(1)主电路SPWM 电压型逆变器,开关器件采用IGBT,这是通用变频器常用的方案;
(2)转速采用转差频率矢量控制,即*1*s ωωω=+,在转速变换过程中,异步电动机的定子电流频率始终跟随转子的实际转速而同步升降,从而使转速 调 节吏加平滑。
图中:*ω、ω-分别为转子角频率给定和转子角频率负反馈;m i 1、t i 1分别为定子电流的转矩分量和励磁分量;θ为转差角;s ω为转差角频率;1ω、ω+分别为定子角频率和转子角频率正反馈;m u 1、s u 1分别为定子电压的转矩分量和励磁分量。
根据式(1)-(4)和图3-1可知,在保持磁通恒定的条件下,电动机的Te 由Ile 计算,磁通也可以通过Ilm 计算。转速可以通过PI 调节器调节,输出Iit 然后计算得到s ω,即: m
r t s i T i 11=
ω (7)
4 转差频率矢量控制调速系统仿真和分析
4.1电动机转差频率矢量控制系统的仿真模型
图4-4 电动机转差频率矢量控制系统的仿真模型
4.2模型参数
转子磁链模型的计算参数设置:异步电动机为3*746KW,220V ,50HZ 二对极(2=p n ),定子绕组电阻Ω=435.0m R ,mH L m 004.0=,转子绕组电阻Ω=816.0r R ,转子绕组漏感mH L m 004.0=,mH L m 069.0=,J=2.19.0m Kg ,逆变器直流电源为510V ,定子绕组电感为,071.0mH L L L s m S =+=mH L R 071.0=,漏磁系数为0.056,087.0=r T 。其中,G1、G2、G3、G4、G5、G6的放大倍数分别为35、0.15.、0076、2、9.55、1/9.55。根据相关公式计算得到:
321***071.0*056.0*435.0u u u U m -=
3241**071.0*056.0*435.0**071.0u u u u U t ++=
)*087.0/(12*u u W s =
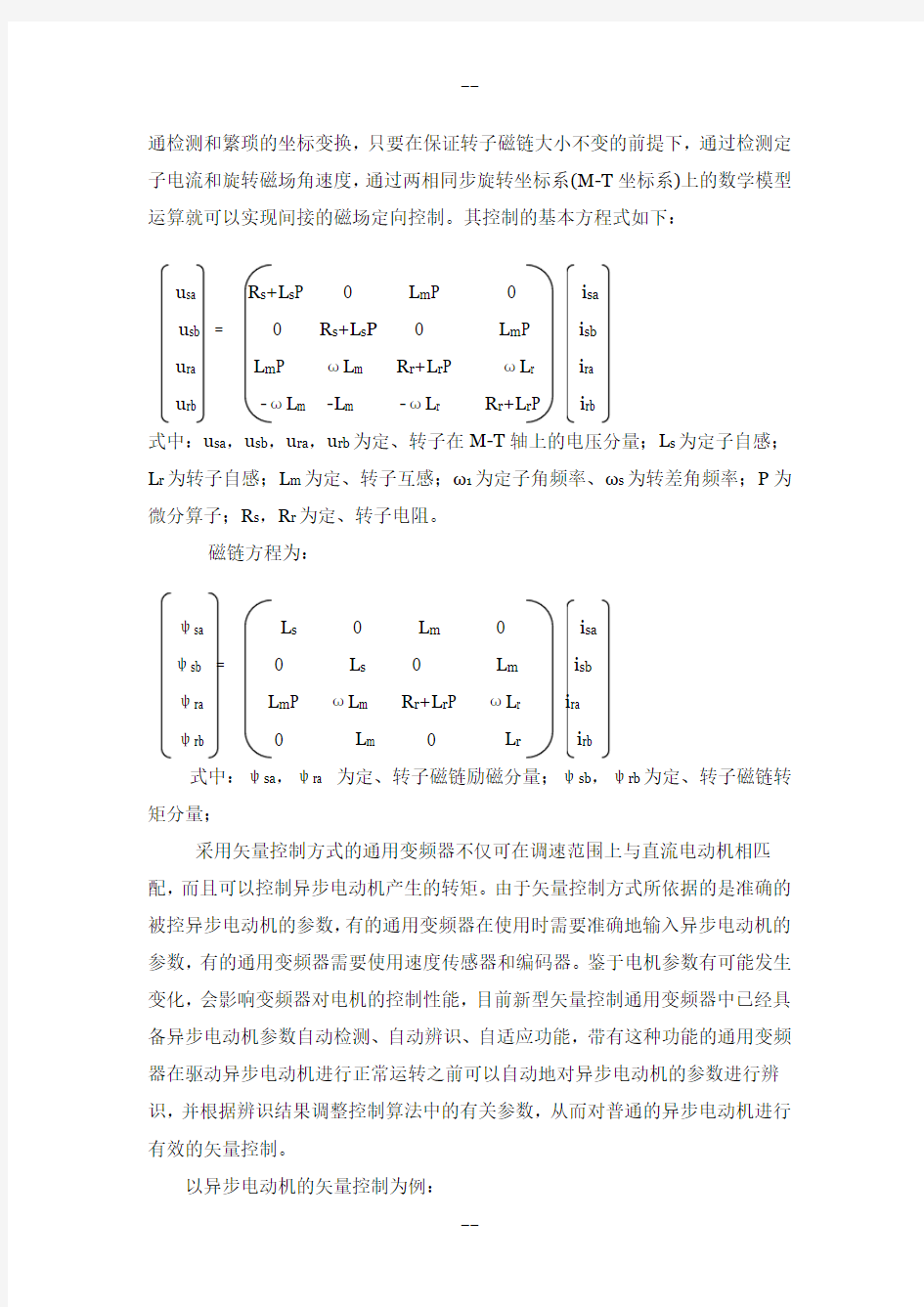
仿真定转速为1400r/min 时的空载启动过程,在启动后0.45s 时加载T1=65N*M 。该系统较复杂,容易出现收敛问题,经试用各种计算方法,最终选用步长算法ode5,步长取e-5。
4.2仿真结果:
0123
456x 1040200
400
600
800
1000
1200
1400
1600
t/s n /(r /m i n )
(a )
0123
456x 104-200
20
40
60
80
100
120
t/s T e T l /N ·m
(b )