基于特征模型的快速模糊自适应控制器的设计及应用
先进控制技术综述

先进控制技术综述1 引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。
对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。
面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。
先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。
本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]。
2 自适应控制自适应控制的思想是对于系统中的不确定性,以及控制任务的艰巨性,对于部分未建模的动态特性、变化的被控对象和干扰信号,及时地测得它们的信息,并根据此信息按一定的设计方法,自动地做出控制决策、修改控制器结构和参数,使其控制信号能够适应对象和扰动的动态变化,在某种意义上达到控制效果最优或次优。
2.1 自适应控制介绍目前自适应控制的种类很多,从总体上可以分为三大类:自校正控制、模型参考自适应控制和其他类型的自适应控制。
自校正控制的主要问题是用递推辨识算法辨识系统参数,根据系统运行指标来确定调节器或控制器的参数。
其原理简单、容易实现,现已广泛地用在参数变化、有迟滞和时变过程特性,以及具有随机扰动的复杂系统。
自校正控制系统的一般结构图如图1所示。
自校正控制适用于离散随机控制系统[2]。
图1 自校正控制结构图模型参考自适应控制,利用可调系统的各种信息,度量或测出各种性能指标,把模型参考自适应控制与参考模型期望的性能指标相比较;用性能指标偏差通过非线性反馈的自适应机构产生自适应律来调节可调系统,以抵消可调系统因“不确定性”所造成的性能指标的偏差,最后达到使被控的可调系统获得较好的性能指标的目的。
模型参考自适应控制可以处理缓慢变化的不确定性对象的控制问题。
由于模型参考自适应控制可以不必经过系统辨识而度量性能指标,因而有可能获得快速跟踪控制。
模型参考自适应控制结构框图如图2所示,模型参考自适应控制一般用于确定性连续控制系统。
基于特征模型的高超声速飞行器姿态控制器与自适应滤波算法的设计

过程 引入的大气 扰 动需 要 作为 测 量 噪声 处 理 , 耦合
的 弹 性 模 态 振 动 、 超 声 速 大 动 压 会 引 起 舵 面 颤 振 高
等都会将 测量 噪声 引入 控制 回路 。 考 虑测 量 噪声 .
时, 既要 通 过 设 计 全 系 数 自适 应 控 制 器 保 证 系 统 闭 环 稳 定 , 要 通 过 滤 波 对 噪 声 有 效 抑 制 , 而 实 现 对 又 从 姿 态 的精 确 跟 踪 和 保 持 . 实 际 上 , 高 超 声 速 飞 行 器 复 杂 的 非 线 性 反 映 原
p s d sr tg s c m p r d wi o e ta e y i o a e t CUKF n CEKF. Nu rc l smu ai n v d mo sr t d ha t e h a d me i a i lto s ha e e n tae t t h c mb n to fCS o i ai n o UKF a d n n i e rg l n s ci n c n r llw a etrp ro ma c n f r e tr n o ln a ode e to o to a h sb te e r n e a d of sa b te f e s l t n t d n i c t n a d c n r lo y e s nc v h ce wi e s rm e os o u i o i e tf a i n o to fh p ro i e il t m a u e ntn ie. o i o h K e w o ds c a a trsi d l TF; UKF;n n i e rg l e e to o to ; h p ro i e c e y r : h r c e itc mo e ;S o ln a od n s cin c n r l y e s n c v hil
模糊控制ppt课件
可编辑课件PPT
23
5. 建立模糊控制表 模糊控制规则可采用模糊规则表4-5来描述,共
49条模糊规则,各个模糊语句之间是或的关系,由第 一条语句所确定的控制规则可以计算出u1。同理,可 以由其余各条语句分别求出控制量u2,…,u49,则控制 量为模糊集合U可表示为
uu1u2 u49
可编辑课件PPT
规则模型化,然后运用推理便可对PID参数实现最佳
调整。
可编辑课件PPT
32
由于操作者经验不易精确描述,控制过程中各种 信号量以及评价指标不易定量表示,所以人们运用 模糊数学的基本理论和方法,把规则的条件、操作 用模糊集表示,并把这些模糊控制规则以及有关信 息(如初始PID参数等)作为知识存入计算机知识库中 ,然后计算机根据控制系统的实际响应情况,运用 模糊推理,即可自动实现对PID参数的最佳调整,这 就是模糊自适应PID控制,其结构如图4-15所示。
可编辑课件PPT
31
随着计算机技术的发展,人们利用人工智能的
方法将操作人员的调整经验作为知识存入计算机中
,根据现场实际情况,计算机能自动调整PID参数,
这样就出现了智能PID控制器。这种控制器把古典的
PID控制与先进的专家系统相结合,实现系统的最佳
控制。这种控制必须精确地确定对象模型,首先将
操作人员(专家)长期实践积累的经验知识用控制
糊控制的维数。
可编辑课件PPT
10
(1)一维模糊控制器 如图所示,一维模糊控制器的 输入变量往往选择为受控量和输入给定的偏差量E。由 于仅仅采用偏差值,很难反映过程的动态特性品质, 因此,所能获得的系统动态性能是不能令人满意的。 这种一维模糊控制器往往被用于一阶被控对象。
可编辑课件PPT
模糊PID控制器设计及MATLAB仿真_李健
图 1 模糊 PID 控制结构图
PID 参 数 模 糊 自 整 定 是 先 找 出 PID 控 制 器 的 3 个 参 数 Kp、 Ki 和 Kd 与偏差 e 和偏差变化率 ec 之间的模糊关系, 在运行中 通过不断检测 e 和 ec,根据模糊控制规则来对 3 个参量进行在
线修改 ,以 满 足 不 同 e 和 ec 对 控 制 器 参 数 的 不 同 要 求 ,从 而 使
起较大的超调 。 微 分 系 数 Kd 影 响 系 统 的 动 态 特 性 ,Kd 越 大 ,越
能抑制偏差变化,但过大会延长调节时间,降低抗干扰能力。
根 据 参 数 Kp、Ki、Kd 对 系 统 输 出 特 性 的 影 响 情 况 ,可 归 纳 出 系统在被控过程中对于不同的偏差和偏差变化率 , 参数 Kp、Ki、 Kd 的自整定原则:
摘要 将模糊控制器和 PID 控制器结合在一起,构造了一个模糊 PID 控制器,利用模糊推理的方法调整 PID 控制器的参数, 并利用 MATLAB 的 SUMLINK 工具箱,对系统进行仿真,仿真结果表明模糊 PID 控制器能使系统达到满意的控制效果。 关键词:PID 控制器,模糊控制,MATLAB,SIMULINK,系统仿真
1.3 模糊控制算法的确立
PID 参数的整定必须考虑到在不同时刻 3 个参数的作 用 以
及相互之间的互联关系。 模糊自整定 PID 是在 PID 算法的基础
上通过计算当前系统误差 e 和误差变化 ec,利用模糊规则 进 行
模糊推理,查询模糊矩阵表进行参数调整。 参数修正公式:
'
Kp =Kp +(e,ec)p
被控对象具有良好的动、静态性能。
1.2 PID 控制器的确立
通常,PID 控制器的控制算式为:
储能系统的参数自适应改进VDCM控制策略
储能系统的参数自适应改进VDCM控制策略一、内容概述随着可再生能源的快速发展,储能系统在电力系统中的地位日益重要,其性能对电网稳定性和可靠性具有关键影响。
传统的控制策略往往无法充分利用储能系统的非线性、时变特性,导致其运行效率低下。
研究适用于储能系统的参数自适应控制策略具有重要的理论和实践意义。
本文首先分析了储能系统的数学模型,包括电压、电流、功率等参数的描述和控制目标。
介绍了VDCM控制方法的基本原理和框架,以及如何将其应用于储能系统的参数自适应改进。
针对储能系统的特点,提出了一种基于最小二乘法的参数估计方法,用于实时在线地估计储能系统的参数。
通过仿真实验验证了所提出的控制策略的有效性,并与传统控制策略进行了对比分析。
A. 研究背景和意义随着全球能源需求的不断增长,电力系统的可靠性、安全性和经济性成为了亟待解决的问题。
储能系统作为一种新型的能源存储技术,可以在电力系统中发挥重要作用,提高电力系统的稳定性、灵活性和经济性。
储能系统的运行过程中,其参数会受到环境变化、负载变化等多种因素的影响,导致系统性能下降。
为了提高储能系统的运行效率和可靠性,需要对储能系统的参数进行实时监控和自适应调整。
传统的控制策略往往基于储能系统的理想模型或者经验公式,无法准确地描述储能系统的动态特性。
成为研究储能系统控制的关键问题。
VDCM是一种具有高度可扩展性的储能系统,其内部元件可以根据负载变化自动调整电容值,实现能量的有效存储和释放。
由于VDCM 的结构复杂,其参数受到多种因素的影响,如温度、湿度、电磁干扰等。
研究如何通过参数自适应改进VDCM控制策略,使其在各种工况下都能保持良好的性能,对于提高储能系统的运行效率和可靠性具有重要意义。
本研究旨在提出一种基于参数自适应的VDCM控制策略,通过对储能系统参数的实时监控和在线估计,实现对VDCM内部元件参数的自适应调整。
本研究将首先分析VDCM的动态特性和参数影响因素,然后设计一种参数自适应控制器,通过优化控制算法和参数设置,实现对VDCM内部元件电容值的精确调节。
基于滑模模糊方法的变速风电系统的最大风能捕捉控制器设计

第 2期
谭
Байду номын сангаас
川,等
基于滑模模糊方法 的变速风电系统 的最大风能捕捉控制器设计
6 9
根据 贝兹 ( t)理论 ,风轮 从空气 中获取 的 Bez
能量 为 :
∞ ) =
则 (1 式可变 换 为 1)
Y ,c) - u(  ̄ - =b j -
P 辱7  ̄p ,) f c C(c = v vo
参数 变化不 敏感 、抗扰 动能 力强等 优 点,在 电力系 统 、交流传 动 、电力 电子技术 等领域 得 到 了广泛 的
应用 。 本文采用积分滑模模糊 自 适应控制策略。 此控制策略基于带积分补偿的滑模变结构控制方 案 ,在被控 对象 无法 精确 建立 数学模 型 的情况 下 ,
项 和切换 项进 行模糊 逼近 ,系统控 制平 稳 , 能有 且
0 引 言
效 降低抖 振现 象 。 将此 控制 策略应 用于变 速风 力发 电系统 中 , 仿真 结 果表 明,在强扰 动和系 统模 型未
风 能是 一种取之 不尽 、用之 不竭 的新 能源 ,同 精 确获 知 的情 况下 , 控制 策略 可 以实现 风 能的最 此 时也是 一种 不可控 的过程 性能源 。 能转换 过程 实 大 捕捉 ,且具有 较 强的鲁棒 性 ,可 以达 到满意 的控 风
=
等
( 2 )
这里 ,
=
应 。 说 明在任 何风速 下,只 要使得 风轮 的叶尖速 这
) p 兀 等
( 风 速变 化 时 , 要通 过发 电机励 磁 系统来 调节 风轮 4 ) 只
转速 ,使 叶尖 速度 与风 速之 比保 持不 变 ,就可 获得
比 ,就 可维 持风 力机在 一下运 行 。因此 ,当 =
基于自适应模糊PID的钢板横剪生产线多电机同步控制系统设计

调 节器 一般 都采 用 比例积 分( P I ) 调节 器 。这种 调节 器 具 有 结 构 简 单 ,可 靠 性 强 ,抗扰 性 好 ,稳 态 精 度高 等 优 点 。但 采 用 P I 调 节器 的双 闭环 调 速 系统 必然 有 超 调现 象发 生 I 。文 献 【 3 】中提 出 了一种 在 速 度 调 节 器 上 引入 转 速 微 分 负 反馈 的 方法 ,它 可 以抑 制 甚 至 消除 转 速 超 调 ,降 低 由负载 扰 动 引起 的动 态 速 降 ,但 过 强 的 微 分 负 反馈 会 使 系统 的响 应 变缓 。 为 解 决这 一 问题 ,将 参数 自适 应模 糊P I D控 制 方法 用 于 多 电机 同步 传 动 系统 。模 糊 控制 方 法 的
步 协 调 控 制 是 制 造 与 生 产 过 程 中 重 要 的 控 制 技
术, 同步控 制 问题 解决 的好 坏直 接 影 响系统 的可靠 性 、控 制 精 度 、生 产效 率 及 产 品质量 。 因 此 , 多 电机 同步 协 调 控 制一 直 是 人 们 不 懈研 究 的技 术 课 题之 一 ,具 有非常 重要 的现 实意义 。
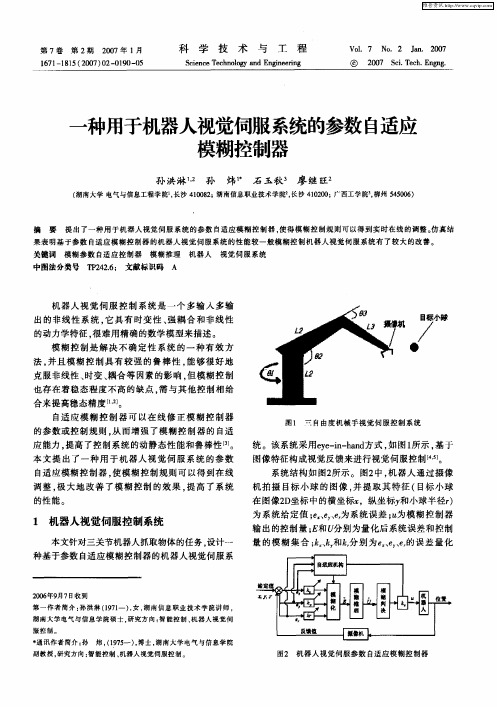
一种用于机器人视觉伺服系统的参数自适应模糊控制器
2 o 年9 o 6 月7日收 到
第 一作者 简介 : 孙洪 淋(9 1 ) 女 , 17 一 , 湖南 信息职业 技术学 院讲 师 ,
湖 南 大 学 电 气 与 信 息 学 院 硕 士 。 究 方 向 : 能 控 制 、 器 人 视 觉 伺 研 智 机 服控 制 。
维普资讯
第 7卷
第 2期
20 0 7年 1月
科 学
技 术
与
工 程
Vo. 7 No 2 J n 2 0 1 . a. 0 7
17 — 8 5 2 0 ) 2 0 9 - 5 6 1 1 1 ( 0 7 0 - 10 0
S in eT c n l g n g n ei g ce c e h oo y a d En i e r n
@ 2 0 S iT c . nn . 0 7 c eh E g g .
一
种用于机器人视觉伺服系统的参数 自适应 模糊控制器
孙 洪淋 孙 炜 石 玉秋。 廖 继 旺 , 2 ’
( 南 大 学 电气 与 信 息 工 程 学 院 长 沙 410 2 湖 南 信 息 职 业 技 术 学 院 长 沙 4 0 0 ;广 西 工 学 院 柳 州 5 5 0 湖 , 08  ̄ , 12 0 , 4 06)
则 比例 因子k 小k 选择 较 小值 。 小k
整 后 模 糊 控 制 规 则 得 到 机 器 人 三 个 关 节 位 置 的期
2 参数 自适应模糊控制器的设计 . 2
22 1 模 糊 化 ..
望变化率( o、 、 ) 机器人位置伺服控制器再 a1 A △ 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 42 卷增刊 1 中南大学学报(自然科学版) Vol.42 Suppl. 1 2011 年 9 月 Journal of Central South University (Science and Technology) Sep. 2011
基于特征模型的快速模糊自适应控制器的设计及应用
邓建球 1, 2 ,张正霞 2 ,黎江 3 ,罗熊 3 (1. 清华大学 计算机科学与技术系, 北京,100084; 2. 海军航空工程学院,山东 烟台,264001; 3. 北京科技大学 计算机与通信工程学院, 北京,100083)
摘要:模糊动态特征建模是将特征建模与模糊逻辑相结合设计的一类智能建模方法,它既具有与特征建模类似的 工程化实际应用方便的特点,又能根据需求保证较高的控制精度。本文针对此类方法,从提高实际应用中的时间 性能出发,基于模糊动态特征建模方法的描述框架,通过有效划分模糊状态区域空间,缩减辨识参数取值的限制 范围,提高辨识算法的效率,提出了一类基于特征模型的快速模糊自适应控制器设计方法。仿真控制试验验证了 方法的有效性。 关键词:特征模型;模糊控制;参数辨识 中图分类号:TP273 文献标志码:A 文章编号:1672−7207(2011)S1−0085−05
Design forfastfuzzyadaptive controllerbased on characteristicmodel
DENG Jianqiu 1,2 , ZHANG Zhengxia 2 , LIJiang 3 , LUO Xiong 3 (1. Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China; 2.Naval Aeronautical Engineering Institute, Yantai264001, China; 3.School of Computer and CommunicationEngineering, University of Science and Technology, Beijing 100083, China)
Abstract:Fuzzy dynamic characteristic modeling is an approach which combines fuzzy logic and characteristic modeling method. It is easy to be used in engineering field which is similar to characteristic modeling method. Meanwhile, it can ensure the control of high precision according to the practical demand. In order to improve the efficiency of identify algorithm, under the architecture of fuzzy dynamic characteristic modeling method, with the help of dividing fuzzy state space to reduce the range of identification parameters, a novel design method for fuzzy adaptive controller based on characteristic modeling is proposed. Simulation experiment verifies the effectiveness of the proposed method. Key words: characteristic model; fuzzy control; parameter identification
目前, 在智能自适应控制方法的实际工程应用中, 往往存在着需要人为调试或估计的参数个数较多、参 数估计收敛难以保证等问题。产生这一问题的一个主 要原因是现有建模和控制理论以精确动力学分析为基 础,建模与控制要求分开来考虑 [1] 。为克服这一困难, 国内学者提出了基于对象特征模型描述的智能自适应 控制方法, 结合对象动力学特征和控制性能要求建模, 而不是仅以对象精确的动力学分析来建模,它从工程 化建模角度出发,为智能控制器设计和一些高阶对象 进行PID等低阶控制器设计提供了理论依据,是目前 一种比较有前途的建模和控制方法 [1] 。不过,对于一 些复杂非线性系统,当使用特征建模方法处理整个系 统时,需要将原系统对应的高价模型的有关信息都压 缩到几个特定参量中,这对高维复杂系统来说有一定
收稿日期:2011−04−15;修回日期:2011−06−15 基金项目:国家自然科学基金资助项目(61004021,61074066) 通信作者: 邓建球(1974−), 男, 湖南常德人, 博士研究生, 从事计算机网络控制系统研究; 电话: 01051537385; Email: djq06@mails.tsinghua.edu.cn中南大学学报(自然科学版) 第 42 卷 86难度。此时,可结合一些智能方法来建立和修正描述 复杂系统的特征模型,面向复杂非线性系统的模糊动 态特征建模和控制方法就是一类有益尝试 [2] 。在模糊 动态特征建模方法框架下,全局动态模型是多个局部 利用低阶时变差分方程描述的特征子模型的模糊逼 近,有效降低了整体特征建模的难度,进一步提高了 系统控制的精度。目前模糊动态特征建模方法已在包 括高超声速飞行器和卫星等复杂飞行器系统中得到了 初步应用 [3] 。虽然基于模糊动态特征模型的智能控制 方法在实际应用中比较单一特征建模方法精度较高, 但针对实时控制的工作任务,该类方法在实现过程中 的时间性能仍有待进一步优化。本文作者在深入总结 特征建模方法实践工程应用中的特点基础上,从提高 辨识算法效率的角度出发,提出了一类基于特征模型 的新型快速模糊自适应控制器设计方法,在保证高精 度控制的同时,提升和改进了基于特征模型的模糊控 制方法的时间性能,通过对典型倒立摆对象的仿真控 制试验比较,验证了该类方法的有效性。 1 基于特征模型和模糊动态特征模 型的自适应控制 所谓特征模型,就是结合被控对象的动力学特征 和控制性能要求进行建模;在同样输入控制作用下, 对象特征模型和实际被控对象在输出上是等价的(即 在动态过程中能保持在允许的输出误差内), 在稳定情 况下,输出是相等的。该方法能够有效地降低待定参 数的数量,减少控制器设计的盲目性,目前已在航天 器变结构变参数的物理仿真系统、带挠性附件的复杂 卫星系统和卫星瞬变热流的控制系统等领域中取得了 良好的仿真与应用结果,展现了广阔的应用前景 [4−6] 。 在特征建模理论中,对于工程上常见的线性定常 高阶对象G(s): 1 110 1 110 () mm mm nn n bsbsbsb Gs sasasa - - - - ++++ = ++++ L L (1) 可以用一个二阶慢时变差分方程来表示 [4] : 12 (1)()()()(1)()() ykfkykfkykgkuk +=+-+ (2) 在此基础上,可以设计维持跟踪控制器、黄金分 割控制器、逻辑微分控制器、逻辑积控制器等多类不 同的控制器 [4] 。 这里主要应用了黄金分割控制器 [3] : 1122 ˆ ˆ ˆ ()()()(1) () ˆ()() LfkykLfkyk uk gkk h +- =- + (3) 其中: ˆ()()() r ykykyk =- ;L1=0.382;L2=0.618;η(k) 为一小正数;yr(k)为期望输出; 1 ˆ () fk , 2 ˆ () fk 和 ˆ() gk 分别为f1(k),f2(k),g(k)的辨识估计值,具体通过递推 最小二乘算法或递推投影算法实现。给出如下定义:
[ ] T T 12
()(),(1),() ˆ ˆ ˆ ()(),(),() kykykuk kfkfkgk ì =- ï
í éù =
ï
ëû î
f q
则有: T (1)()() ykkk +=fq
递推最小二乘法计算规则为:
T T T
(1)(1) () 1(1)(1)(1) ˆ ˆ ˆ ()(1)()()(1)(1) ()()()(1) kk k kkk kkkkkk kkkk -- ì = ï +--- ï ï éù =-+--- í ëû ï éù ï =-- ëû ï î P K
P
θ θ Ky θ
PIKP f ff f f (4)
其中:初始的P(0)选定为正定对角阵。 递推投影算法计算规则为:
()(1) kk =-+ θ θ
T T
(1) ()(1)(1) (1)(1) ak kkk ckk ×- éù --- ëû +-- y θ
θ f f f (5)
其中:0<a<2;c>0。 模糊动态特征建模方法是对一般特征建模方法的 推广 [6−7] , 是在划分的模糊子空间中分别进行高效特征 建模,然后通过线性加权的方式有效整合,形成全局 系统模糊模型 [8] 。设模糊动态特征模型共有 r 条模糊 规则,其基本形式如下 [9−10] :
{ } 1 1 1 2 IFand()is THEN(1)()() ()(1)()() j p i jj j r iii i ii kM RRykfkyk fkykgkuk x = =
ì ï ï ï ==+=+ í
ï ï -+
ï î
(6)
其中: j i j M (j=1, 2, …,p)为模糊集合; R uÎ 为控制量; ) (k j x (j=1, 2, …, p)为可测变量; ) ( 1 k f i , ) ( 2 k f i 和
) (k g i 为慢时变系数;y(k)为状态量。后者即表示相应
模糊子集中对应的局部特征模型,这是一个二阶慢时 变差分方程。
2 基于特征模型的快速模糊自适应 控制器
在上述特征建模方法中, 辨识方法常用的有2种: