功能块引脚说明
基于S7连接的西门子双边通信的实现与仿真

基于S7连接的西门子双边通信的实现与仿真摘要:西门子S7通信中,待交换的数据量过大时,常用的PUT、GET单边通信方式便不再适用,此时可以考虑使用允许数据量更大的双边通信。
文中对双边通信中的BSEND、BRCV方式进行了组态、编程以及仿真,较为详细的阐述了该种方式下双边通信的具体实现细节,并通过S7 SIMULATOR仿真器进行了两个PLC各自的数据收发过程的仿真,对现场控制系统中的直接应用提供便利及参考。
关键词:S7连接;双边通信;BSEND;BRCV;仿真1、S7协议S7协议指的西门子的专用通讯协议,主要用于实现S7 PLC之间或者S7 PLC 与PC之间的通信,必须先在NetPro对连接进行组态,而后才可进行基于 S7 协议的通信。
已组态的连接将通过在组态过程中指定的唯一连接名称进行标识。
S7协议定义了两个连接类型:基于 PROFIBUS 或以太网的S7 连接、基于冗余连接路径的S7容错连接。
2、单、双边通信通信涉及到的数据的读写操作,是通过指定变量的存储区域(如 [M]区,[DB]区,[I],[Q]区等)、存储地址、数据量大小及数据类型来操作,变量的类型决定了它的长度以及在通信中如何处理。
S7通信分为单边通信和双边通信,其中S7-300、S7-400系统支持双边通信,S7-200只支持单边通信。
单双边通信的区别,在于编程时是在单侧PLC中调用函数,如PUT、GET,还是需要在两侧PLC 中都需要编程调用BSEND、BRCV或者USEND、URCV功能块。
在双边通信中,BSEND向类型为BRCV的远程伙伴发送数据,通讯伙伴之间可传送的数据量多于使用已组态S7连接的单边通信传送的数据量。
BSEND和BRCV功能快的各个引脚参数说明如表1和表2所示。
表1.BSEND指令的各个引脚说明表2.BRCV指令的各个引脚说明3、系统架构对基于以太网的 S7 协议通信, SIMATIC NET 系列为 SIMATIC S7 系列控制器和 PC与工作站都提供了通信模块。
升压芯片FT8003
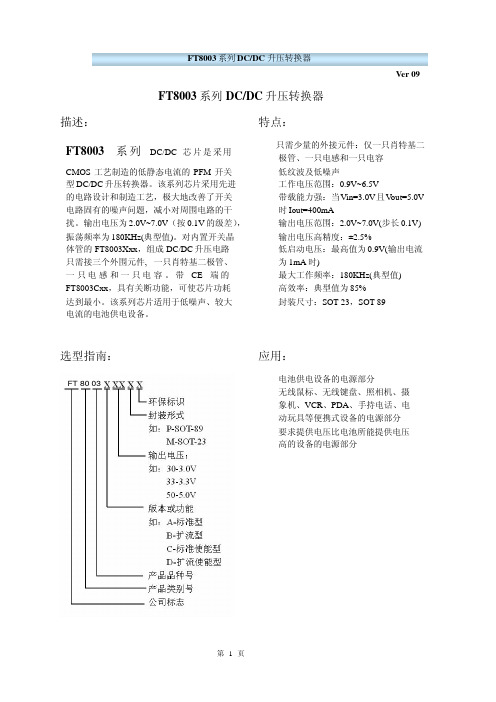
测试条件
IOUT=1mA, VIN:0→2V IOUT=1mA, VIN:2→0V 无外部元件 Vout=Vout*0.95 Vout=Vout+0.5V
最小 Vout*0.975
VouVtLXVout*0.9
Vout=VLX=6V Vout=set Vout*0.95
on(VLX“L”)side
Ver 09
极限参数:
参数 VIN 脚电压 Lx 脚电压 EXT 脚电压
CE 脚电压 Lx 脚输出电流 EXT 脚输出电流 允许最大 SOT23
SOT89 工作温度 存贮温度 焊接温度和时间
符号
VIN VLX VEXT VCE ILX IEXT Pd Pd
TOpr Tstg Tsolder
极限值 6.5 6.5
引脚号
SOT-23-5 SOT-89-5
4
5
2
2
5
4
1
3
3
1
符号
Vss Vout Ext CE NC
FT8003Fxx
引脚号 SOT-23-5
1 2 3 4 5
符号
FB Vdd NC Vss EXT
功能块框图:
引脚描述
接地引脚 升压输出引脚
扩流引脚 使能端
空
引脚描述
反馈端 输入电压引脚
空 接地引脚 扩流引脚
Ver 09 Topr=25℃
FT8003A33
(4)空载输入电流-输出电压:(L=47uH,Cout=47uF,Vout=100uF,SD:1N5717/5819) Topr=25℃
第9页
FT8003 系列 DC/DC 升压转换器 (5)输入电流 1-输出电压:
C51单片机引脚图及引脚功能介绍

80C51单片机引脚图及引脚功能介绍首先我们来介绍一下单片机的引脚图及引脚功能(如下图所示),引脚的具体功能将在下面详细介绍单片机的40个引脚大致可分为4类:电源、时钟、控制和I/O引脚。
⒈ 电源:⑴ VCC - 芯片电源,接+5V;⑵ VSS - 接地端;⒉ 时钟:XTAL1、XTAL2 - 晶体振荡电路反相输入端和输出端。
⒊ 控制线:控制线共有4根,⑴ ALE/PROG:地址锁存允许/片内EPROM编程脉冲① ALE功能:用来锁存P0口送出的低8位地址② PROG功能:片内有EPROM的芯片,在EPROM 编程期间,此引脚输入编程脉冲。
⑵ PSEN:外ROM读选通信号。
⑶ RST/VPD:复位/备用电源。
① RST(Reset)功能:复位信号输入端。
② VPD功能:在Vcc掉电情况下,接备用电源。
⑷ EA/Vpp:内外ROM选择/片内EPROM编程电源。
① EA功能:内外ROM选择端。
② Vp p功能:片内有EPROM的芯片,在EPROM编程期间,施加编程电源Vpp。
⒋ I/O线80C51共有4个8位并行I/O端口:P0、P1、P2、P3口,共32个引脚。
P3口还具有第二功能,用于特殊信号输入输出和控制信号(属控制总线)。
拿到一块单片机,想要使用它,首先必须要知道怎样去连线,我们用的一块89C51的芯片为例,我们就看一下如何给它连线。
1、电源:这当然是必不可少的了。
单片机使用的是5V电源,其中正极接40管脚,负极(地)接20管脚。
2、振蒎电路:单片机是一种时序电路,必须供给脉冲信号才能正常工作,在单片机内部已集成了振荡器,使用晶体振荡器,接18、19脚。
只要买来晶体震荡器,电容,连上就能了,按图1接上即可。
3、复位管脚:按图1中画法连好,至于复位是何含义及为何需要复要复位,在单片机功能中介绍。
4、 EA管脚:EA管脚接到正电源端。
至此,一个单片机就接好,通上电,单片机就开始工作了。
我们的第一个任务是要用单片机点亮一只发光二极管LED,显然,这个LED必须要和单片机的某个管脚相连,不然单片机就没法控制它了,那么和哪个管脚相连呢单片机上除了刚才用掉的5个管脚,还有35个,我们将这个LED和1脚相连。
80C51单片机引脚图及引脚功能介绍

80C51单片机引脚图及引脚功能介绍首先我们来介绍一下单片机的引脚图及引脚功能(如下图所示),引脚的具体功能将在下面详细介绍单片机的40个引脚大致可分为4类:电源、时钟、控制和I/O引脚。
⒈电源:⑴ VCC - 芯片电源,接+5V;⑵ VSS - 接地端;⒉时钟:XTAL1、XTAL2 - 晶体振荡电路反相输入端和输出端。
⒊控制线:控制线共有4根,⑴ ALE/PROG:地址锁存允许/片内EPROM编程脉冲① ALE功能:用来锁存P0口送出的低8位地址② PROG功能:片内有EPROM的芯片,在EPROM 编程期间,此引脚输入编程脉冲。
⑵ PSEN:外ROM读选通信号。
⑶ RST/VPD:复位/备用电源。
① RST(Reset)功能:复位信号输入端。
② VPD功能:在Vcc掉电情况下,接备用电源。
⑷ EA/Vpp:内外ROM选择/片内EPROM编程电源。
① EA功能:内外ROM选择端。
② Vpp功能:片内有EPROM的芯片,在EPROM 编程期间,施加编程电源Vpp。
⒋ I/O线80C51共有4个8位并行I/O端口:P0、P1、P2、P3口,共32个引脚。
P3口还具有第二功能,用于特殊信号输入输出和控制信号(属控制总线)。
拿到一块单片机,想要使用它,首先必须要知道怎样去连线,我们用的一块89C51的芯片为例,我们就看一下如何给它连线。
1、电源:这当然是必不可少的了。
单片机使用的是5V电源,其中正极接40管脚,负极(地)接20管脚。
2、振蒎电路:单片机是一种时序电路,必须供给脉冲信号才能正常工作,在单片机内部已集成了振荡器,使用晶体振荡器,接18、19脚。
只要买来晶体震荡器,电容,连上就能了,按图1接上即可。
3、复位管脚:按图1中画法连好,至于复位是何含义及为何需要复要复位,在单片机功能中介绍。
4、EA管脚:EA管脚接到正电源端。
至此,一个单片机就接好,通上电,单片机就开始工作了。
我们的第一个任务是要用单片机点亮一只发光二极管LED,显然,这个LED必须要和单片机的某个管脚相连,不然单片机就没法控制它了,那么和哪个管脚相连呢?单片机上除了刚才用掉的5个管脚,还有35个,我们将这个LED和1脚相连。
AC800F功能块

AC800F常用功能块一、模拟量11信号指示一个可定义的循环数。
输出包括当前计数器读数CTC,上一循环的最终计数值在CTP端输出,CTP信号在下一次复位前一直保持。
限位值(消息)对应的是当前周期的当前计数器读数。
该功能块必须运行在等间隔的间隔任务。
功能块数据:模拟输入计数器CT_ANA名称数据类型配置访问说明输入端EN 布尔型YES 读写使能 TRUE:功能块在运行IN 实型NO 读写输入信号BES 布尔型NO 读写复位信号PR 实型YES 读写预置值L1 实型YES 读写限位值1L2 实型YES 读写限位值2输出端ENO 布尔型NO 只读过程状态。
TRUE:功能块在运行CTC 实型NO 只读上一周期以来的计数器当前值CTP 实型NO 只读上周期的计数器读数OFL 布尔型NO 只读输出信号TRUE代表可参数化的时间SL1 布尔型NO 只读TRUE如果超出限位值1SL2 布尔型NO 只读TRUE如果超出限位值22、线性化,LIN功能:该功能块按IEC584-1或IEC751标准把热电偶电后或电阻阻值转换成温度。
线性化校正值误差限制为0.1%功能块数据:线性化,LIN名称数据类型配置访问说明输入端EN 布尔型YES 读写使能 TRUE:功能块在运行IN 实型NO 读写输入信号输出端ENO 布尔型NO 只读过程状态。
TRUE:功能块在运行OUT 实型NO 只读输出信号ERR 布尔型NO 只读TRUE:功能块出错STA 整型NO 只读功能块的错误状态代码3、设定点控制器:C_ANA功能:该功能块用于无控制器功能的模拟值输入,如微为设定点站或乘法器.在自动方式模拟信号在IN端输入.在手动方式可以处理手动值。
如果将其配置为称重器,比值RAT和偏差BIA用到输出端OUT.OUT:输出 IN:输入 MV:手动值可以用输入信号MI和ME,MM和MA改变工作方式内部和外部,自动和手动。
如果输入对都设置为逻辑1信号,功能块将工作在内部手动工作方式。
技能培训专题-中控ECS-700 用户功能块 V2.0
类别 静态 瞬态 瞬态 静态 静态 瞬态 瞬态
描述 空闲,初始状态 正常工作,主逻辑
暂停过程 暂停于某处
跳步状态 恢复运行过程
结束过程
监控中需要实现功能块修改模式\命令值时: 模式\命令值修改后需要自动复位 ,否则一直接 赋值影响执行.
2
添加参数
3
组成元素
4
程序代码
语法\关键字\函数 同ST 语言.
(*语句序列2*);
ELSE ...
(*语句序列3*);
END_CASE;
ST语言
FOR 语句 FOR I := 1 TO 100 BY 2 DO DOSOMETHING(); END_FOR;
WHILE 语句 WHILE 条件 DO … (*语句组*) END_WHILE;
ST语言
ST语言
例题:自定义综合算术运算模块 Mode =1 : OUT=IN1+IN2 Mode =2 : OUT=IN1- IN2 Mode =3 : OUT=IN1 * IN2 Mode =4 : OUT=IN1 \ IN2
从当前步跳到指定步(选中指定步,点击跳步按钮)
用于异常状态快速中止:使RUNNING、PAUSING、 RESTARTING、STOPPING过程或PAUSED状态终 止,进入IDLE状态。
� 参数查看与下载:
可对参数进行查看,在不连接实际位号情况下可以对输入和 输出参数设值,调试程序。 • 可下载的参数类型有:输入参数、输出参数、别名变量 • 不可下载的参数类型有:组态参数
举例1 : 生产控制程序, 当温度小于20℃, 液位小于1%时开始 加A料, 至液位大于20%时关闭A 进料阀并开始加B料, 直到液 位大于70%时关闭B进料阀, 静置 10分钟( 该时间可以修改).
XL1509 原厂最新资料
2A 150KHz 40V Buck DC to DC Converter
Preliminary Datasheet XL1509
电路特性(系统参数)
反馈点要 远离电感
大电流走线要粗,短,不拐弯
可调电阻要紧挨 输出脚,短线连接
图 5:XL1509 测试电路和版图指导
R1 最好选择 1K,精度为 1% 的电阻。C1 和 CFF 可选择;为了增加系统的稳定性,减小输入电 源线上的噪声,CIN 和 C1 必须紧挨 PIN1 和 PIN5~PIN8;
Rev 2.0 4
2A 150KHz 40V Buck DC to DC Converter
Preliminary Datasheet XL1509
最大额定值(注释 1) 参数
输入电压 反馈引脚电压 ON/OFF 引脚电压 输出开关引脚电压 功率消耗 热阻 (SOIC8) (结环境, 无加热, 自然通风) PN结工作温度 存储温度 引线(脚)耐焊接温度(热焊接, 10 秒) 静电放电 (人体模型)
单位:毫米(英寸)
注释 1:工作在列表的最大额定值以上会造成器件永久损坏。在上述条件范围内只能进行 功能操作,并不意味着不可以工作在此条件或任何其他以上条件,长时间工作在最大额定 值条件下可能影响器件可靠性。
Rev 2.0 5
2A 150KHz 40V Buck DC to DC Converter
Preliminary Datasheet XL1509
68/20
68/25
斯普拉斯 595D 系列 (uF/V) 470/4 390/6.3 330/10 180/16 180/16 120/20 33/25 15/50
前馈电容
33nF 10nF 3.3nF 1.5nF 1.5nF 680pF 220pF 220pF
功能块图编程软件使用手册
芯片1408引脚定义
芯片1408引脚定义
芯片1408引脚定义是指芯片上的引脚所代表的功能和作用。
每个引脚都有其独特的任务和连接方式,以实现芯片的各项功能。
我们来看一下芯片1408引脚的定义及其作用。
1. 引脚1:VCC
该引脚是芯片的电源引脚,连接正电源以供芯片正常工作。
2. 引脚2:GND
该引脚是芯片的地引脚,连接负电源以供芯片正常工作。
3. 引脚3:RESET
该引脚是芯片的复位引脚,当该引脚接收到复位信号时,芯片会回到初始状态。
4. 引脚4:CLK
该引脚是芯片的时钟输入引脚,用于提供时钟信号给芯片的内部电路。
5. 引脚5:DATA_IN
该引脚是芯片的数据输入引脚,用于接收外部数据输入。
6. 引脚6:DATA_OUT
该引脚是芯片的数据输出引脚,用于输出芯片内部处理后的数据。
7. 引脚7:ADDR
该引脚是芯片的地址输入引脚,用于接收外部地址输入。
8. 引脚8:CS
该引脚是芯片的片选引脚,用于选择芯片进行操作。
通过上述引脚的定义,我们可以看出芯片1408具有电源供给、复位、时钟输入、数据输入输出、地址输入、片选等功能。
不同的引脚连接方式可以实现不同的操作和功能,从而满足不同的应用需求。
总结一下,芯片1408引脚的定义清晰明了,每个引脚都有其特定的作用和功能,通过合理连接和使用,可以实现芯片的各项功能。
在设计电路或应用中,我们需要根据具体需求来合理使用这些引脚,以达到预期的效果。
FAB2 系列智能控制器用户手册说明书
序言序言感谢您选购了本公司FAB2使用前花些时间阅读一下本手册,您将会更方便地使用本产品。
FAB2系列智能控制器是一种采用功能块(FBD)LCD液晶显示面板的智能控制器。
它将以往PLC工作大大地简化。
FAB2生活的每个空间。
本手册将详细介绍FAB2用方法。
注意:(1)不得影印或转载本手册全部或部分内容。
FAB2 Intelligent Controller目录目录第一章F A B2简介1.1 FAB2的结构 (1)1.2 规格型号 (2)1.3 FAB2特点 (3)第二章F A B2的安装与接线2.1 FAB2的安装 (5)2.1.1 FAB2的安装方法 (5)2.1.2 FAB2的安装尺寸 (5)2.2 FAB2的接线 (6)2.2.1 FAB2的电源接线 (6)2.2.2 FAB2的输入接线 (7)2.2.3 FAB2的输出接线 (8)第三章功能模块概述3.1 基本功能模块(GF) (11)3.1.1 AND (12)3.1.2 OR (13)3.1.3 NOT (13)3.1.4 NAND (14)USER'S MANUAL3FAB2 Intelligent Controller目录4.3.1.3 FAB2_Addr 读写/修改地址界面 (38)4.3.2 Set 设置界面 (38)4.4 编辑FAB2功能程序 (39)4.4.1 编程规则 (39)4.4.2 中间继电器 (40)第五章通讯连接5.1 FAB2 的下载口 (43)5.2 FAB2 的485 接口 (43)5.2.1 FAB2 的A1B1 接口 (43)5.2.1 FAB2 的A1B1 接口 (43)5.3 FAB2通讯模块使用说明 (45)第六章应用6.1 学校上课或者工厂上班铃声的控制 (47)6.2 楼梯、大厅或者走廊照明多功能开关 (49)6.3 自动门控制要求 (49)6.4 通风系统 (50)6.5 霓虹灯控制系统控制要求 (51)6.6 展示橱窗照明系统 (54)6.7 FAB2在楼宇管理中的应用 (55)6.8 FAB2在二极管耐压计数及包装流水线上的引用 (56)USER'S MANUAL5FAB2 Intelligent Controller目录3.1.6 帮助 (72)3.1.7 编辑 (72)3.1.8 搜索 (72)3.1.9 FAB2操作 (73)3.1.10 窗体 (73)3.2 工具栏 (74)3.2.1 标准工具栏 (74)3.2.2 控制工具栏 (74)3.3 模块库 (75)3.3.1 模块库操作 (77)3.3.2 模块分类 (77)3.3.3 模块属性的设置 (77)3.3.3.1 通用属性 (77)3.3.3.2 特殊属性设置 (78)第四章基本操作4.1 开启文档 (86)4.1.1 开启新文档 (86)4.1.2 开启原有文档 (87)4.2 编写功能图程序 (88)4.2.1 放置模块 (88)USER'S MANUAL7FAB2 Intelligent Controller目录2.6 AF-10MR-E2/AF-20MR-E2 (114)2.7 AF-10MT-GD2/AF-20MT-GD2 (115)附录3 保用说明 (117)附录4 关于USB驱动说明 (119)USER'S MANUAL9FAB2 Intelligent Controller第一章 FAB2简介第一章 FAB2简介FAB2系列PLC 是老FAB 系列PLC 的升级版,它也采用功能块FBD (Function Block Diagram)的方式编写程序,比起传统的PLC 编程(梯形图和指令)更为简单易学。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
驱动块:
1. CH_AI
MODE: 系统生成,表示信号/通道类型。用户不修改。
VALVE:连接输入通道地址
VHRANGE:量程上限
VLRANGE:量程下限
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能
SUBS_V:输出的替代值(模拟量)
QBAD:通道的诊断。等于1表示通道故障
V:输出值
QUALITY:过程值的质量代码
2. CH_AO
MODE: 系统生成,表示信号/通道类型。用户不修改。
U:输入值
UHRANGE:量程上限
ULRANGE:量程下限
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道地址
2
QUALITY:过程值的质量代码
3.CH_DI
MODE: 系统生成,表示信号/通道类型。用户不修改。
VALUE:连接输入通道地址
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能
SUBS_V:输出的替代值(模拟量)
QBAD:通道的诊断。等于1表示通道故障
Q:输出值
QUALITY:过程值的质量代码
4.CH_DO
MODE: 系统生成,表示信号/通道类型。用户不修改。
I:输入值
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道地址
3
QUALITY:过程值的质量代码
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道的地址
QUALITY:过程值的质量代码
控制块:
1.模拟量监视 MEAS_MON
CSF:控制系统故障。连接通道的QBAD引脚
U:过程值输入(PV)
QC_U:过程值的质量代码
U_AH:报警高高限
U_WH:报警高限
U_WL:报警低限
U_AL:报警低低限
HYS:偏差
QH_ALM:高高报警输出(红色报警)
QL_ALM:低低报警输出(红色报警)
QH_WRN:高报警输出(黄色报警)
QL_WRN:低报警输出(黄色报警)
4
2.数字量监视:DIG_MON
I:过程值
QC_I:过程值的质量代码
CSF:控制系统故障。连接QBAD
MSG_CLAS:报警级别,范围从1-8。选择八条报警信息中的那一条作为报警输出。
Q:过程值输出。Q=I
3.PID: CTRL_PID
GAIN:比例
5
TN:积分时间常数
TV:微分时间常数
PV_IN 过程值
QC_PV_IN:过程值的质量代码
CSF:控制系统故障
SP_TRK_ON:设定值跟踪过程值
SP_EXT:外部输入/程序输入的设定值
SPEXTHLM:外给定SP的高限
SPEXTLLM:外给定SP的低限
LIOP_INT_SEL :决定是程序还是操作员具有选择内给定/外给定的权限
SPEXON_L:程序里选择SP内给定/外给定的开关
SPEXTSEL_OP:操作员选择SP内给定/外给定的开关
SP_OP:操作员输入的设定值
LIOP_MAN_SEL:决定是程序还是操作员具有选择手动/自动的权限
AUT_L:程序里选择手动/自动的开关
AUT_ON_OP:操作员选择手动/自动的开关
LMN_SEL:=1激活PID输出的外部跟踪值
LMN_TRK: PID输出的外部跟踪值
LMNR_IN:PID输出的反馈
QC_LMN_IN:输出反馈的质量代码
QSPEXTON:SP内给定/外给定的状态
QMAN_AUT:手动/自动的状态
LMN:PID调节输出
QC_LMN:调节输出的质量代码
ER: 偏差SP-PV
SP:实际设定值
4.阀门:VALVE
6
FB_OPEN:开反馈
QC_FB_OP:开反馈的质量代码
FB_CLOSE:关反馈
QC_FB_CL:关反馈的质量代码
CSF:控制系统故障
LIOP_SEL:决定程序还是操作员来选择手动/自动的开关
AUT_L:程序选择手动/自动
AUT_ON_OP:操作员选择手动/自动
MONITOR:激活监视反馈功能
TIM_MON: 监视时间
MAN_ON:手动状态下的开停开关
AUTO_OC:自动状态下的开停开关
SS_POS:故障安全位置1=故障开;0=故障关
V_LOCK : 1=阀门到故障安全位置
VL_OPEN:1=阀门开
VL_CLOSE:1=阀门关
优先级:V_LOCK>VL_CLOSE>VL_OPEN
QMON_ERR:阀门监视故障输出
QOPENED:阀门开状态
QCLOSED:阀门关状态
QCONTROL:控制输出(连接DO)
QMAN_AUT:阀门手自动状态
5.马达:MOTOR
7
FB_ON:开反馈
QC_FB_ON:开反馈的质量代码
CSF:控制系统故障
LIOP_SEL:决定程序还是操作员来选择手动/自动的开关
AUT_L:程序选择手动/自动
AUT_ON_OP:操作员选择手动/自动
MAN_ON:手动状态下的开停开关
AUT_ON:自动状态下的开停开关
MONITOR:激活监视反馈功能
TIM_MON: 监视时间
LOCK:联锁关马达(界别最高)
LOCK_ON:联锁开马达
QMON_ERR:马达监视故障输出
QRUN:马达正在运行
QSTOP:马达停止状态
QSTART:控制输出(连接DO)
QMAN_AUT:马达手自动状态