基于无线通信的嵌入式机器人控制系统设计
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断发展,智能家居已成为现代生活的重要组成部分。
扫地机器人作为智能家居领域中的一员,以其便捷、高效、智能的特点受到了广泛关注。
本文将详细介绍基于STM32的扫地机器人的设计与实现过程,包括硬件设计、软件设计、系统实现以及测试与优化等方面。
二、硬件设计1. 微控制器:选用STM32系列微控制器,具有高性能、低功耗的特点,满足扫地机器人对控制系统的要求。
2. 电机与驱动:扫地机器人采用直流电机,配合电机驱动模块,实现机器人的运动控制。
3. 传感器:包括红外线测距传感器、超声波测距传感器、碰撞传感器等,用于实现机器人的避障、定位等功能。
4. 电源模块:采用可充电锂电池,为扫地机器人提供稳定的电源。
5. 其他硬件:包括电源开关、充电接口、LED指示灯等辅助模块。
三、软件设计1. 操作系统:采用实时操作系统(RTOS),实现多任务调度,提高系统响应速度和稳定性。
2. 算法设计:包括路径规划算法、避障算法、清洁模式算法等,实现扫地机器人的智能控制。
3. 通信协议:设计扫地机器人与上位机通信的协议,实现远程控制、状态反馈等功能。
4. 软件架构:采用模块化设计,将软件分为多个功能模块,便于后期维护和升级。
四、系统实现1. 路径规划:扫地机器人采用激光雷达或视觉传感器进行环境感知,通过路径规划算法生成清洁路径。
2. 避障功能:通过红外线测距传感器和超声波测距传感器检测障碍物,实现避障功能。
3. 清洁模式:扫地机器人可设置多种清洁模式,如自动模式、沿边模式、重点清洁模式等,以满足不同需求。
4. 远程控制:通过上位机与扫地机器人通信,实现远程控制功能。
5. 状态反馈:扫地机器人通过LED指示灯和上位机界面反馈工作状态和电量等信息。
五、测试与优化1. 测试:对扫地机器人进行功能测试、性能测试和稳定性测试,确保各项功能正常工作。
2. 优化:根据测试结果对算法和硬件进行优化,提高扫地机器人的工作效率和清洁效果。
智能移动机器人运动控制系统及算法的设计

智能移动机器人运动控制系统及算法设计1、本文概述随着技术的快速发展,智能移动机器人已经渗透到我们生活的每一个角落,从工业制造到家庭服务,从深海探测到太空旅行,到处都是智能移动机器人。
为了使这些机器人能够自主、高效、安全地移动,强大而精确的运动控制系统和算法至关重要。
本文将详细探讨智能移动机器人运动控制系统和算法的设计,以期为相关领域的研究人员和技术人员提供宝贵的参考和启发。
本文将首先概述智能移动机器人的运动控制系统,包括其基本组件、主要功能和设计要求。
接下来,将详细介绍几种常见的运动控制算法,如PID控制算法、模糊控制算法、神经网络控制算法等,并分析它们的优缺点和适用性。
本文将根据具体的应用场景和需求,深入探讨如何设计和优化智能移动机器人的运动控制系统和算法。
在此过程中,将使用示例详细说明算法设计过程、实现方法和性能评估。
本文还将展望智能移动机器人运动控制系统和算法的未来发展趋势,包括与深度学习、强化学习等人工智能技术的结合,以及在自动驾驶、智能家居等新兴领域的应用前景。
通过本文的讲解,读者可以全面深入地了解智能移动机器人的运动控制系统和算法,为未来的研究和应用奠定坚实的基础。
2、智能移动机器人运动控制系统的基本组成传感器模块:传感器是机器人感知外部环境的关键部件,包括距离传感器(如激光雷达和超声波传感器)、视觉传感器(如相机)、姿态传感器(如陀螺仪和加速度计)等。
这些传感器为机器人提供周围环境的信息,如物体的位置、形状、颜色等。
控制决策模块:控制决策模块是机器人的“大脑”,负责处理传感器收集的信息,并根据预设的任务目标或环境变化做出决策。
该模块通常包括一个或多个处理器,运行复杂的控制算法和决策逻辑。
执行器模块:执行器是机器人实现运动的直接部件,如电机、伺服等。
根据控制决策模块的输出,执行器将驱动机器人进行相应的运动,如向前、向后、转弯等。
电源模块:电源模块为整个运动控制系统提供所需的电能。
对于移动机器人,电源模块可以包括电池、电源管理电路等,以确保机器人在执行任务期间有足够的能量供应。
基于FreeRTOS与远程姿态控制的机械手控制系统设计
基于FreeRTOS 与远程姿态控制的机械手控制系统设计叶烁,梁国威,屈福康(广东工业大学华立学院,广州511325)摘要:介绍了一种基于FreeRTO S 与远程姿态控制的机械手控制系统设计思路,整个系统分为柔性欠驱动机械手、机 械手末端执行器控制系统和无线姿态控制系统三大部分。
分析了系统的硬件设计和控制系统的程序设计,采用人体手 部姿态角变化对机械手末端姿态进行闭环控制,以及在机械手抓取物体时对机械手表面压力进行实验。
实验结果表明: 机械手可以实现手指姿态的跟随控制,完成单指控制、多指控制、张开、合拢等动作,接触物体到抓取物体的过程较为平 稳。
关键词:机械手;远程姿态控制;柔性 中图分类号:TP 242文献标识码:A0引言机器人技术是高科技人工智能应用领域不可缺 失的组成部分,如何利用机器人代替人类进行危险 实验,受到越来越多科研工作人员的关注[11。
为了提高操作者的安全性,各个领域都试用了远程机械手 协同操作系统。
1958年美国的联合控制公司生产了 世界上第一台机械手,使用示教型控制系统。
1974 年,瑞典ABB(Asea Brown Boveri )机器人公司研制出 了代号为“IRB 6”的机器人,主要控制方式为远程电 控。
2013年,美国体感控制器制造公司Leap 发布了 体感控制传感器Leap Motion。
Leap Motion 体感控制 传感器使用双目视觉建立三维空间,以捕获和分析 手势运动信息并用于人工智能和运动控制的二次开 发。
慕尼黑大学Schwarz 等人通过MEMS (Micro - Electro-Mechanical System ) 传感器收集并识别 了手的 动作轨迹,进而完成了医疗室中医生与计算机的同 步操作。
斯坦福大学Dowling 等人在前交叉韧带损伤 的监测和膝关节的识别的研究中使用了惯性MEMS 传感器,发现采集传感器的反馈信息能够有效地减 少在跳跃过程中膝关节受伤的概率。
基于nRF2401的足球机器人无线通信系统
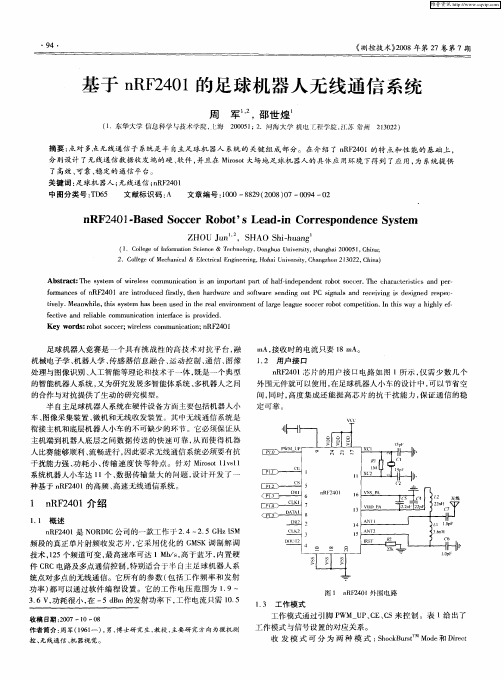
n F 4 1芯片 的用户接 口电路 如 图 1所示 , 需 少数几个 R 20 仅 外 围元 件就可 以使用 , 足球 机器 人小车的设计 中 , 以节省空 在 可 问, 同时 , 高度集 成还 能提高芯片 的抗干扰 能力 , 保证通 信 的稳
定 可靠 。
人比赛 能够顺 利 、 畅进行 , 流 因此要求无线通信系统必须要有抗
摘要 : 点对 多点无线通信子 系统是半 自主足球 机 器人 系统 的关键 组成部 分 。在 介绍 了 n F 4 1的特 点和 性 能的基础 上 , R 20
分 别 设 计 了无 线 通 信 数 据 收 发 端 的硬 、 件 , 软 并且 在 M rst i o 大场 地 足 球 机 器 人 的 具 体 应 用环 境 下得 到 了应 用 , 系 统提 供 o 为
f ci e a d rla l o e tv n eib e c mm u i ain i e fc sprv d d. n c t ntra e i o i e o
Ke r s rb ts c e ; iee s c mmu ia in n 2 01 y wo d : o o o c r w rl s o nc t ; RF 4 o
了高效 、 可靠 、 稳定的通信平 台。
关 键 词 : 球 机 器人 ; 线 通 信 ;R 2 0 足 无 n F4 1
中图分 类号 :D 5 T 6
பைடு நூலகம்
文献标识码 : A
文章编号 :00— 89 2 0 ) 7— 0 4— 2 10 8 2 ( 0 8 0 0 9 0
n RF2 01 Ba e o c r Ro t S Le d—n Co r s n n e S s e 4 一 s d S c e bo ’ a i r e po de c y t m
多机器人系统中娱乐机器人控制系统的设计
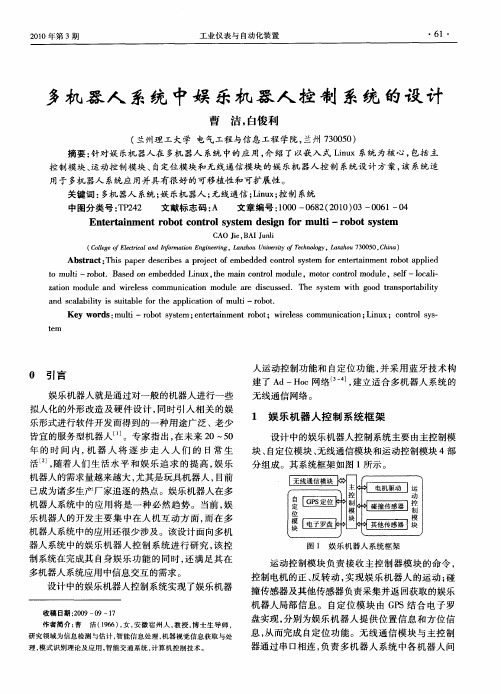
为控制信 号 。脉 冲频 率直 接影 响电动 机转速 和负载 能力 , 率高 连续 性好 , 负 载 能 力差 ; 率 低 则反 频 但 频
之 。实验 证 明 , 冲频率在 1 3 z 脉 5~ 0 H 时效 果 最佳 。
为 弥补 G S静 止 状 态下 无 法 给 出航 向信 息 的 P 不足, 设计 中引入 电子 罗 盘为 娱乐 机 器 人提 供 准 确 的 自身方 位信 息 , 使得 自定位 性能更 加可靠 。
口可 以方便对 系统 进 行 调试 ; S U B接 口用 于嵌 入式
Ln x系统更新 。 iu 2 2 运 动控 制模块 .
直 流 电机 控制 电路采 用基 于 P WM 原理 的 H 型 桥式驱 动 电路 。直 流 电机 P WM 驱 动模 块 的 电路设 计与实 现具体 电路 如 图 3所示 。
z to o u e a d wiee s c m mu i ain mo u e a e d s u s d Th y t m t o d ta s o a i t ain m d l n rl s o n c to d l r ic s e . e s se wih g o r n p r bl y t i a d s aa i t s s t b e fr te a pl ain o li r b t n c l b l y i ui l o h p i to fmu t — o o . i a c
C i , AO Je BAI u l ni J
( oeeo l tcl n n r tnE gneig L nh uU iri Tcn l y L nh u7 05 C ia C lg l fEe r a dI omai n i r , a zo n esyo eho g , azo 30 0,hn ) ci a f o e n v tf o
多机器人协同自主控制系统设计与实现

多机器人协同自主控制系统设计与实现随着机器人技术的不断发展,多机器人系统在各个领域的应用越来越广泛。
多机器人协同自主控制系统是指通过多个机器人之间的协作与协调,实现对复杂任务的高效完成。
本文将对多机器人协同自主控制系统的设计与实现进行探讨。
首先,多机器人协同自主控制系统的设计需要考虑以下几个方面:任务分配与协作、路径规划与避障、通信与数据传输。
任务分配与协作是多机器人协同自主控制系统的核心问题之一。
在任务分配上,需要根据各个机器人的能力和任务要求,合理分配任务,使得每个机器人能够发挥自己的优势,同时保证任务的高效完成。
在任务协作上,需要机器人之间能够相互协同合作,共同解决问题。
例如,在一种搜索救援任务中,有些机器人负责搜索目标,有些机器人负责救援行动,它们之间需要通过通信与协调,实现任务的高效协同。
路径规划与避障是多机器人协同自主控制系统中的另一个重要问题。
路径规划是指为每个机器人规划一条合理的路径,使得它们能够快速有效地到达目标位置。
在路径规划中,需要考虑到机器人的动态特性、环境的动态变化以及其他机器人的运动情况。
避障是指在路径规划过程中,避免机器人与障碍物发生碰撞。
为了实现高效的避障,可以使用传感器技术,如激光雷达、红外传感器等,实时感知环境,避免与障碍物的碰撞。
通信与数据传输是多机器人协同自主控制系统中的基础保障。
机器人之间需要进行实时的信息交流与数据传输,以实现任务分配、路径规划、避障等功能。
为了实现可靠的通信与数据传输,可以采用无线通信技术,如Wi-Fi、蓝牙、RFID等,通过无线网络传输数据,并通过协议确保数据的安全和可靠性。
在多机器人协同自主控制系统的实现过程中,可以使用一些常见的软件和硬件平台,如ROS(机器人操作系统)、Gazebo仿真环境、Arduino开发板等。
ROS是一个开源的机器人操作系统,提供了一些常用的机器人功能包,如导航、感知、规划等,可以方便地实现多机器人协同自主控制系统的开发。
基于FPGA的小型足球机器人无线通信子系统的设计
第2 8卷 第 1 期 1
21 0 1年 l 1月
机
电
工
程
V l 8 No 1 o _2 . 1
NO . 2 V 011
Ju n l fMe h nc l& E e tc lE gn eig o ra c a ia o lcr a n ie rn i
基于 F G P A的小型足球机器人 无线通信子系统的设计
s a l c l o c r r b tb s d 0 PGA m l s ae s c e o o a e n F
W ANG n Mi g,ZHAO Xi o,L a —mi g a IXi o n
( aut o c a i l n ie r g& A tm t n Z ei gSiT c nv r t, n zo 10 8 hn ) F c l f y Meh nc g ei aE n n uo ai , hj n c ehU i s y Ha gh u3 0 1 ,C ia o a — ei
a d r c ii g mo u e R s l h w t a h s s se i h g l n e r t d i i a y t mp e n , a o d p r r n e o ei bl y n e e vn d l . e u t s o h tt i y tm s i hy i t ga e , t s e s o i lme t h s a g o ef ma c f r l i t , s o a i
一种爬壁机器人的无线通讯系统设计
爬壁 机 器人 的无 线通 讯 系统是 作 为大 飞机 蒙 皮 结构 健康 检 测真 空 吸附爬 壁机 器人 背 景下 的 一
个子 系统进行研究 工作 , 目的是 通 过 研 究 建 立 起 无 线 通 讯 系 统 。 后 嵌 入 到 飞 机 蒙 皮 健 康 检 测 爬 然
Ab t a t F r t e d ma d o i ln o d sr c v e t g o n el e c , e eo i g a v c u a s r t n ci i g sr c : o h e n fb g p a e n n e tu t e tsi fi tli n e d v l p n a u m b o p i l i n g o mb n r b t De i n b s d o e P o o . s a e n t TR8 0 d l o l i g rb t r l s o g h 0 0 mo ue f rci n o o e e s C mmu ia in s se i ef r d T e g n r l mb wi n c t y t m sp r me . h e e a o o d sg ft e r b ti ito u e r t a d t e h r l s y t m a d r r c pe d a r m n tra e d sg e e in o o o n r d c d f sl n h n t ewi e s s se h r wa e p n i l ig a a d i e f c e in a h s i y; e i n r
2 世 纪 以来 , 壁 机 器 人 在 工 程 领 域 的 应 用 1 爬 日益 广 泛 , 壁 机 器 人 迎 来 了其 快 速 发 展 的 关 键 爬 时 期 。 作 为 爬 壁 机 器 人 和 地 面 系统 的 交 互 平 台 。
远程遥控机器人设计与实现
远程遥控机器人设计与实现一、设计与构造1.确定需求:首先需要明确机器人的用途和功能,例如用于巡逻、探索或者搬运等。
根据需求来确定机器人的尺寸、形状和动力系统等。
2.构造机器人框架:选择合适的材料搭建机器人的框架,可能需要用到金属、塑料或者3D打印材料。
3.安装电机与传感器:根据机器人的用途,根据需要安装电机和传感器,例如驱动电机、摄像头、超声波传感器等。
4. 添加控制系统:选择合适的控制模块,例如Arduino或者树莓派,将其安装在机器人上,并与电机和传感器连接。
5.设计蓄电池和电路系统:选择合适的电池并设计电路系统,以供机器人提供动力。
二、无线遥控1.选择合适的无线通信模块:选择可靠的无线通信模块,例如蓝牙、Wi-Fi或者射频模块,用于机器人和遥控设备之间的通信。
2.搭建通信系统:根据选定的通信模块,搭建机器人和遥控设备之间的通信系统。
可能需要编程和配置模块,使其能够相互通信。
3.编写遥控程序:为遥控设备编写程序,使其能够与机器人进行通信并发送指令。
4.连接遥控设备和机器人:将遥控设备和机器人分别连接到所选的通信模块,并进行配对和配置。
三、远程操作1.启动遥控设备:启动遥控设备,连接到机器人的通信模块。
2.与机器人建立连接:在遥控设备上选择机器人,并与机器人的通信模块建立连接。
3.远程操控机器人:通过遥控设备发送指令,例如移动、旋转、拍照或者执行任务等。
四、注意事项1.安全性:在远程控制机器人时,要确保安全性,避免被非法入侵或者黑客攻击。
可以采用数据加密和身份验证等安全措施来保护通信安全。
2.通信距离:无线通信模块的通信距离有限,因此要确保机器人和遥控设备在有效的通信范围内。
3.电池寿命:机器人通常使用电池供电,要确保电池寿命足够长,以免在使用过程中电池耗尽导致机器人失去动力。
4.传感器精度:机器人的传感器要具备足够的精度,以便能够准确感知周围环境,并将信息传递给遥控设备。
5.可靠性和稳定性:在选择材料和组装机器人时,要保证机器人的可靠性和稳定性,以确保在远程控制过程中不出现故障。
救援机器人控制系统的设计毕业设计
摘要近年来,由于环境恶化导致的自然灾害以及战争导致的人为灾害经常发生。
在灾难发生后的48小时以内,是在受灾现场废墟中寻找幸存者的黄金时间。
灾难救援现场环境往往是异常复杂、危险、多变,救援行动刻不容缓,在此种环境下,采用救援机器人协同救援人员,进行救援行动,能起到事半功倍的作用。
结合救灾场所的非结构化环境,本毕业设计设计了一款救援使用的探测机器人.机器人采用通用开放式机器人系统,采用模块化设计。
机器人系统的性能和功能可以根据救灾环境的需要很方便的增减。
良好的无线通讯功能允许远程操作。
在演示控制界面可以用单片机语言控制机器人移动状况。
控制系统结构流程:计算机发出信号经过电平转换到无线收发模块,之后通过无线通讯到无线接收模块,通过单片机处理以及数据锁存最终控制机器人。
调速系统硬件原理是以AT89S51单片机为控制核心。
救援机器人采用了多种传感器共同作用,以便更加精确的获得探测结果,包括使用3CCD 感光器获得图像信息、使用超声红外传感器精确确定探测目标的位置。
采用履带式行走机构,履带具有较强的驱动力,可以在阶梯上移动、重心低而稳定。
救援机器人具有可靠的机械系统和智能化的控制系统,可以在救灾现场恶劣的自然环境下工作。
矚慫润厲钐瘗睞枥庑赖。
关键词:救援机器人;控制系统;传感器;模块化设计;开放式机器人;AbstractIn recent years,due to the natural disasters caused by environmental degradation and man-made disasters caused by the war happened veryoften.Disaster rescue site environment is often complicated,dangerous, changeable,so it is urgent to rescue.In this environment,adopt the rescue robot coordinated rescue workers to carry on the rescue operation,can have the effect of get twice the result with half the effort.聞創沟燴鐺險爱氇谴净。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言
轮式移动机器人是机器人研究领域的一项重要内容,它集机械、电子、检测
技术与智能控制于一体,是一个典型的智能控制系统。智能机器人比赛集高科技、
娱乐、竞技于一体,已成为国际上广泛开展的高技术对抗活动。现以arm7处理
器为控制核心,采用无线通信技术,并移植嵌入式实时操作系统μC/OS-Ⅱ设
计了一套智能机器人控制系统。
2硬件设计
根据竞技机器人的功能要求进行总体设计,将各个功能进行模块化,其控制
系统硬件框图如图1所示。中央处理器采用微控制器结构,用以控制外围设备协
调运行。舵机控制机器人的运动方向;驱动电机电动机采用输出轴配有光电编码
器的小型直流电机驱动车轮旋转。电磁铁作为机械手夹紧的执行元件。设置了两
路超声波传感器、8路光电检测输入和8路开关量检测接口。整个机器人的运行
状态和运行参数通过LCD动态显示。
2.1微控制器的选型
机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时
控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系
统μC/OS-Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植
性和可扩展性。LPC2129是Philips公司生产的一款32位arm7TDMI-S微处理器,
嵌入256 KB高速Flash存储器,它采用3级流水线技术,同时进行取指、译码
和执行,而且能够并行处理指令,提高CPU的运行速度。由于它的尺寸非常小,
功耗极低,抗干扰能力强,适用于各种工业控制。2个32位定时计数器、6路
PWM输出和47个通用I/O口,所以特别适用于对环境要求较低的工业控制和小
型智能机器人系统。因此选用LPC2129为主控制器,可以获得设计结构简单、性
能稳定的智能机器人控制系统。
2.2无线通信接口设计
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2
所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两
个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工
通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因
此特别适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干
扰能力强;⑥功耗小,通信稳定。
2.3光电检测模块设计
2.3.1光电检测过程
设计光电检测模块,使机器人能够检测地面上的白色引导线。光电检测电路
主要包括发射部分和接收部分,其原理如图3所示。发射部分的波形调制采用了
频率调制方法。由于发光二极管的响应速度快,其工作频率可达几兆赫兹或十几
兆赫兹,而检测系统的调制频率在几十至几百千赫兹范围之内,因此能够满足要
求。光源驱动主要负责将调制波形放大到足够的功率去驱动光源发光。光源采用
红外发光二极管,工作频率较高,适合波形为方波的调制光发射。
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信
号通常较微弱,需进行滤波和放大后才能进行处理。调制信号的放大采用交流放
大形式,可以将调制光信号与背景光信号分离开来,为信号处理提供方便。调制
信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,该模块
的本质是将"交流"的、有用的调制光信号从"直流"的、无用的背景光信号中分离
出来,从而达到抗干扰的目的
2.3.2光电探头
在机器人底盘前部安装有光电探头,共设置了5个检测点,其结构如图4
所示。
从理论上讲,检测点越多,越密,识别的准确性与可靠性越高。但是硬件的
开销与软件的复杂程度也相应增加。采用该寻线系统保证了检测的精确度,也节
约了硬件的开销。发光二极管发出的调制光经地面反射到光敏二极管。光敏二极
管产生的光电流随反射光的强弱线性变化。检测出这种变化,即可判断某一个检
测点是否在白色引导线的上方,从而判断机器人和白色引导线的相对位置。
2.4超声波测距传感器设计与实现
两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距
离,起导航作用。其接收部分与微控制器的捕获和定时管脚相连接。整个超声波
检测系统由超声波发射、超声波接收和单片机控制等部分组成。发射部分由高频
振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换
能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信
号通过电容C2隔除掉了信号中的直流量并给超声波换能器MA40S2S.其工作过
程:U1A和U1B产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C
变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器
MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明
显变差,因此一般对交流电压进行隔除直流处理。U2A为74ALS00与非门,
control_port(控制端口)引脚为控制口,当control_port为高电平时,超声
波换能器发射超声波信号。
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接
收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电
压比较LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相
连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
3 实时操作系统μC/OS-II的移植
μC/OS-Ⅱ是一个嵌入式实时操作系统内核,包含了任务调度、任务管理、
时间管理、内存管理和任务间的通信与同步等基本功能。μC/OS-II进行任务
调度时,会把当前任务的CPU寄存器存放到该任务堆栈中,然后再从另一个任务
堆栈中恢复原来的工作寄存器,继续运行另一个任务。
根据各个控制功能和微控制器的资源结构对任务进行划分,共划分为7个应
用任务,其划分过程如图7所示。无线串行通信采用中断接收方式,保证数据接
收的实时性。
μC/OS-Ⅱ任务的建立包括定义任务堆栈、设定任务优先级、初始化该任务
要求的系统硬件及实现具体的控制过程等4部分。现以任务1为例,介绍应用任
务的建立过程。a
在嵌入式实时操作系统环境下开发实时应用程序,可使程序的设计和扩展变
得容易,而且无需大的改动即可增加新的功能。通过将应用程序分割成若干独立
的任务模块,可大大简化应用程序的设计过程;而且能快速、可靠地对实时性要
求苛刻的事件。通过有效的系统服务、嵌入式实时操作系统,能使系统资源得到
更好的利用。
4调试运行
在机器人控制系统起动时,μC/OS-Ⅱ对堆栈空间、各个控制寄存器和外设
器件的硬件进行初始化,并设定当前各个功能部件的初始状态。
在实时机器人系统下,机器人正常启动后,系统实时监视机器人在比赛场上
的运行状况,若出现某一动作或功能无效则给出出错信息。正常运行时实时显示
机器人在比赛场上的坐标值和动作状态,如图8所示。
5 结语
根据智能机器人的控制要求,设计了基于无线通信的嵌入式机器人控制系统。在软件设
计上移植了嵌入式实时操作系统μC/OS-Ⅱ。利用光电检测模块和超声波导航模块感知外
部信息,实现了对智能机器人的控制。