天津大学 现代控制理论课件 窦立谦
合集下载
天津大学 现代控制理论课件 窦立谦 第3章 线性系统的能控性和能观性
3.1 能控性的定义
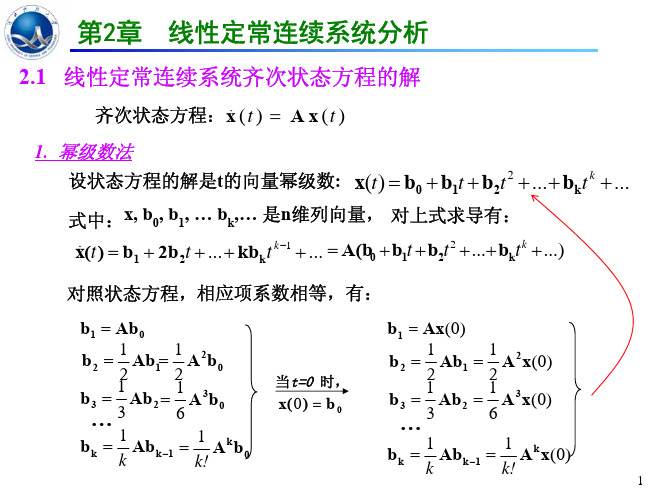
1 提出
状态空间模型建立了输入、状态、输出之间的关系
u x y
x Ax Bu y Cx Du
状态方程反映了控制输入对状态的影响;输出方程 反映系统输出对控制输入和状态的依赖 能控性揭示系统输入对状态的制约能力;能观性反 映从外部对系统内部的观测能力; 能控性和能观性的概念是卡尔曼在1960年提出,成为现
若系统存在某一个状态x(t0)不满足上述条件,则此 系统称为不能控系统。
3.1 能控性的定义
3 几点说明
绪论
本章结构
• 第3章 线性控制系统的能控性和能观性 3.1 能控性的定义 3.2 线性定常系统的能控性判别 3.3 线性连续定常系统的能观性 3.4 离散时间系统的能控性与能观性 3.5 时变系统的能控性与能观性 3.6 能控性与能观性的对偶关系 3.7 状态空间表达式的能控标准型与能观标准型 3.8 线性系统的结构分解 3.9 传递函数阵的实现问题 3.10 传递函数中零极点对消与状态能控性和能观性的关系
3.1 能控性的定义
2 定义
若系统(A(t),B(t))对初始时刻t0,存在另一时刻tf (tf > t0),对t0时刻的初始状态x(t0) = x0,可以找到一 个允许控制u(t),能在有限时间t0− tf 内把系统从初态x(t0) 转移至任意指定的终态x(tf ),那么就称系统在t0时刻的 状态x(t0)是能控的。若系统在状态空间中的每一个状态 都能控,那么就称系统在(t0,tf)时间间隔内是状态完 全能控的,简称状态能控的或能控系统。
(2)当A为对角阵时,如果B的元素有0,则系统不
可控。
(3)当A为约旦标准型时,只要相应的约旦块对 应的B的最后一个元素不为0,则系统可控。 (4)从结构图看,若存在于u无关的孤立方块,则系 统不可控。
1.2-现代控制理论的主要内容PPT优秀课件

6
最优控制(1/1)
1.2.2 最优控制
最优控制理论是研究和解决从一切可能的控制方案中寻找最 优解的一门学科。 ➢ 具体地说就是研究被控系统在给定的约束条件和性能指 标下,寻求使性能指标达到最佳值的控制规律问题。 ➢ 例如要求航天器达到预定轨道的时间最短、所消耗的燃 料最少等。
该分支的基本内容和常用方法为 ➢ 变分法; ➢ 庞特里亚金的极大值原理; ➢ 贝尔曼的动态规划方法。
8
随机系统理论和最优估计(2/2)
最优估计讨论根据系统的输入输出信息估计出或构造出随机 动态系统中不能直接测量的系统内部状态变量的值。 ➢ 由于现代控制理论主要以状态空间模型为基础,构成反馈 闭环多采用状态变量,因此估计不可直接测量的状态变量 是实现闭环控制系统重要的一环。 ➢ 该问题的困难性在于系统本身受到多种内外随机因素扰 动,并且各种输入输出信号的测量值含有未知的、不可测 的误差。
系统辨识是重要的建模方法,因此亦是控制理论实现和应用 的基础。 ➢ 系统辨识是控制理论中发展最为迅速的领域,它的发展还 直接推动了自适应控制领域及其他控制领域的发展。
11
自适应控制(1/5)
1.2.5 自适应控制
自适应控制研究当被控系统的数学模型未知或者被控系统的 结构和参数随时间和环境的变化而变化时,通过实时在线修正 控制系统的结构或参数使其能主动适应变化的理论和方法。 ➢ 自适应控制系统通过不断地测量系统的输入、状态、输 出或性能参数,逐渐了解和掌握对象,然后根据所得的信息 按一定的设计方法,做出决策去更新控制器的结构和参数 以适应环境的变化,达到所要求的控制性能指标。 ➢ 该分支诞生于1950年代末,是控制理论中近60年发展最为 迅速、最为活跃的分支。
12
自适应控制(2/5)
最优控制(1/1)
1.2.2 最优控制
最优控制理论是研究和解决从一切可能的控制方案中寻找最 优解的一门学科。 ➢ 具体地说就是研究被控系统在给定的约束条件和性能指 标下,寻求使性能指标达到最佳值的控制规律问题。 ➢ 例如要求航天器达到预定轨道的时间最短、所消耗的燃 料最少等。
该分支的基本内容和常用方法为 ➢ 变分法; ➢ 庞特里亚金的极大值原理; ➢ 贝尔曼的动态规划方法。
8
随机系统理论和最优估计(2/2)
最优估计讨论根据系统的输入输出信息估计出或构造出随机 动态系统中不能直接测量的系统内部状态变量的值。 ➢ 由于现代控制理论主要以状态空间模型为基础,构成反馈 闭环多采用状态变量,因此估计不可直接测量的状态变量 是实现闭环控制系统重要的一环。 ➢ 该问题的困难性在于系统本身受到多种内外随机因素扰 动,并且各种输入输出信号的测量值含有未知的、不可测 的误差。
系统辨识是重要的建模方法,因此亦是控制理论实现和应用 的基础。 ➢ 系统辨识是控制理论中发展最为迅速的领域,它的发展还 直接推动了自适应控制领域及其他控制领域的发展。
11
自适应控制(1/5)
1.2.5 自适应控制
自适应控制研究当被控系统的数学模型未知或者被控系统的 结构和参数随时间和环境的变化而变化时,通过实时在线修正 控制系统的结构或参数使其能主动适应变化的理论和方法。 ➢ 自适应控制系统通过不断地测量系统的输入、状态、输 出或性能参数,逐渐了解和掌握对象,然后根据所得的信息 按一定的设计方法,做出决策去更新控制器的结构和参数 以适应环境的变化,达到所要求的控制性能指标。 ➢ 该分支诞生于1950年代末,是控制理论中近60年发展最为 迅速、最为活跃的分支。
12
自适应控制(2/5)
天津大学 现代控制理论课件 窦立谦 第5章 线性定常系统的综合
将受控对象写 成不可控但可 观测的实现
5.2 极点配置问题
5.2 极点配置问题
5.2 极点配置问题
2 采用输出反馈
ur×1
xn×1
ym×1
vr×1
r ×m
∑ 0 :A, B, C ) (
∑ H = [ A + BHC , B, C ]
改变了系统的极点。
5.2 极点配置问题
(1)定理 )定理5.2-2
0 0 0 1 & x = 1 −1 0 x + 0 u , y = [ 0 1 1] x 0 1 −1 0
①验证原系统的能控性。 验证原系统的能控性。
1 0 0 rank[ B AB A2 B] = 0 1 −1 = 3 0 0 1
④计算K 计算
K = [ k1 k 2 k3 ] = [ −2 − 3 − 3]
5.2 极点配置问题
例5.2-2 试研究下列受控对象
G (s) = 10( s + 1) s ( s + 1)( s + 2)
采用状态反馈使闭环极点位于 −2,− 1 ± j 的可能性。 将受控对象写 成可控但不可 观测的实现
5.1 线性反馈控制系统的基本结构
5.1 线性反馈控制系统的基本结构
5.1 线性反馈控制系统的基本结构
定理5.1-2:输出反馈不改变原系统的能观性与能控性. 定理
5.1 线性反馈控制系统的基本结构
例5.1-1
5.1 线性反馈控制系统的基本结构
绪论
本章结构 • 第5章 线性定常系统的综合 章
f * (λ ) = (λ + 2)( λ + 1 + j 3)( λ + 1 − j 3) = λ 3 + 4λ 2 + 8λ + 8
现代控制理论课件_前半部分复习
1
(3) e
e
At 2
e
A( t1 t 2 )
e t
2
(4) 当AB BA时, e e
At Bt
t e
3
e
( A B )t
(7) T e T e
1 At
( T 1 AT )t
7/110
3.3 线性定常系统状态转移矩阵
(t ) AX (t ) X
称该系统在t0 , t 上是状态完全可控的。
如果对非零x R n ,存在u t t 0 , t ,使得
如果x 可以是状态空间中的任意点,则
21/110
5.2 状态可控性定义
可控态全体所构成的集合记为X c Xc
t0 ,t 是状态空间的线性子空间,称为
可控态的表达式
t e 0 e Jt 0 0 0 te e
t
t t e 2 te
t
2
t
t t e 3! t 2 t e 2 tet 0 0
3
t e 0
0 0 0
e t 0 0
t t e m 1! t m 2 t e m 2 ! m 3 t e t m 3! t te t e
即i I A的零空间是 i维的。
13/110
4.1 对角线规范型
对角线规范型:
1 ~ A
2
n
存在对角线规范型的充分必要条件是: A具有n个线性独立的特征向量。变换矩阵 由此n个特征向量构成。
14/110
4.2 特征向量和运动模态
当A具有n个独立特征向量wi时,则W [ w1 w2 ...wn ] 使得 X(t ) ~ x 0 e t wi 模态的线性组合
(3) e
e
At 2
e
A( t1 t 2 )
e t
2
(4) 当AB BA时, e e
At Bt
t e
3
e
( A B )t
(7) T e T e
1 At
( T 1 AT )t
7/110
3.3 线性定常系统状态转移矩阵
(t ) AX (t ) X
称该系统在t0 , t 上是状态完全可控的。
如果对非零x R n ,存在u t t 0 , t ,使得
如果x 可以是状态空间中的任意点,则
21/110
5.2 状态可控性定义
可控态全体所构成的集合记为X c Xc
t0 ,t 是状态空间的线性子空间,称为
可控态的表达式
t e 0 e Jt 0 0 0 te e
t
t t e 2 te
t
2
t
t t e 3! t 2 t e 2 tet 0 0
3
t e 0
0 0 0
e t 0 0
t t e m 1! t m 2 t e m 2 ! m 3 t e t m 3! t te t e
即i I A的零空间是 i维的。
13/110
4.1 对角线规范型
对角线规范型:
1 ~ A
2
n
存在对角线规范型的充分必要条件是: A具有n个线性独立的特征向量。变换矩阵 由此n个特征向量构成。
14/110
4.2 特征向量和运动模态
当A具有n个独立特征向量wi时,则W [ w1 w2 ...wn ] 使得 X(t ) ~ x 0 e t wi 模态的线性组合
现代控制理论(1-8讲第1-2章知识点)精品PPT课件
dia dt
Ke
I fD Coபைடு நூலகம்st
n f Const
nDJ , f
其中:Kf 为发电机增益常数;Ke 为电动机反电势常数。
(3).电动机力矩平衡方程:J
d
dt
f
Kmia
(Km
-电动机转矩常数)
以上三式可改写为:
d
dt
f J
Km J
ia
dia dt
Ke Ra
La
La
ia
Kf La
if
试写出其状态空间表达式。
解:选择相变量为系统的状态变量,有
•
•
•• •
x1 y x2 y x1 x3 y x2
故
即
•
x1 x2
•
x2 x3
•
x3
a0 a3
x1
a1 a3
x2
a2 a3
x3
1 a3
u
•
0
x 0
a0
a3
1 0 a1 a3
0
0
1 x 0 u
a2
1
a3 a3
a1 y a0 y
bnu (n)
b u (n1) n 1
b0u
(1)
分为两种情况讨论。
一、输入信号不含有导数项:
此时系统的运动方程为:
•
y(n)
a y(n1) n1
a1 y a0 y b u
故选
x1 y
•
x2 y
..
xn1
y(n2)
xn y(n1)
对左边各式求导一次,即有
18
24
2-3 化系统的频域描述为状态空间描述
现代控制理论理论.ppt
(t) eAt
1
(sI
A)1
2et 2et
e2t 2e2t
et e2t
et
2e2t
1(t)
(t)
e At
2et 2et
e2t 2e2t
et e2t
et
2e2t
§2 状态转移矩阵的求解
(m
1
1)
!
t
m1
e At e1t
1t
.
.
(m
1
2)
!
t
m
1
...
.
..
.
.
t
0
1
(2-23)
§2 状态转移矩阵的求解
若矩阵A为一约当矩阵,即
A1
A
J
A2
Aj
其中 A1, A2 , , Aj 为约当块
(t) eAt
(2-9)
t0 0
(t t0 ) e A(tt0 )
(2-10)
§1 自由运动
齐次方程的解,可表示为
x(t) (t)x(0)
或
x(t) (t t0)x(t0)
(2-11) (2-12)
上式表明齐次状态方程的解,在初始状态确定情况下,由状态
转移矩阵唯一确定,即状态转移矩阵 (t)包含了系统自由运动的全
§2 状态转移矩阵的求解
例2-5
考虑如下矩阵
现代控制理论导论课件(第三次课)-1
(1) Re 0 ,λ对应的所有运动模式收敛,即随着时间趋于
无穷而趋于零。 (2) Re 0, λ对应的所有运动模式发散,即随着时间
趋于无穷而趋于无穷,并且是按指数规律发散。
(3) Re 0 分两种情况:
若λ对应的约当块全是一阶块,这时λ的代数重数与几何 重数一致,不会发生发散现象,运动模式也不收敛,运动模 式是有界的;
定义 BIBS全稳定 若对任意的x(0), 及在任意有界输入u(t)作用下, 均有
x(t)有界, 则称系统(3-1)BIBS 全稳定。
定理3-2 系统(3-1)BIBS稳定←→系统(3-1)全体可控模式收敛. 系统(3-1) BIBS 全稳定←→系统(3-1)全体可控模式收敛, 全体不可控模式 无发散。
若对任意的x(0), 均有 lim x(t) 0, 则称(3-4)的 t
零解为渐近稳定。
定理3-1 对方程(3-4) 零解的稳定性有下列充分必要条件成立: (1) 李雅普诺夫意义下稳定←→A的实部为零的特征值对应的 约当 块是一阶块,其余特征值均具有负实部;
(2) 渐近稳定←→ A 的特征值均具有负实部;
eA1t
C1
0
0 e A2t
x1(0)
x2
(0)
C1e
A1t
x1(0)
A1中的模态包括两部分,可控可观和可观不可控,所以 要求可观不可控模式无发散。
BIBO稳定研究 C(sI A)1 B G(s) 的极点是否具有负实部,
这正是经典控制理论中研究的稳定性。
一、运动模式及其收敛、发散、有界的条件
(3-1) 式中A阵的特征值称为模态;
ni 重特征值 对应的运动形式可能有et , tet ,
它们均称为系统的运动模式。
现代控制理论课件ch2(10级本1)
=
⎡0 ⎢⎣− 2
1⎤ − 3⎥⎦
这是一种由状态转移矩阵求系统矩阵A的有效方法。
7
性质5 x ( t 2 ) = Φ( t 2 − t1 ) x ( t1 ) 这 是 ∵ Φ (t2 − t1 ) x (t1 ) = Φ (t2 )Φ ( − t1 ) x (t1 ) = Φ (t2 ) x (0 )
(2)
A
=
⎢ ⎢
0
−2
0
⎥ ⎥
⎢⎣ 0 0 −3⎥⎦
⎡e−t 0 0 ⎤
Φ (t )
=
e At
=
⎢ ⎢
0
e−2t
0
⎥ ⎥
⎢⎣ 0 0 e−3t ⎥⎦
⎡λ1 1 0 0 ⎤
(3)
A
=
⎢ ⎢ ⎢
0 0
⎢ ⎣
0
λ1
0 0
1
λ1
0
0
⎥ ⎥
0⎥
λ
2
⎥ ⎦
⎡ ⎢
e
λ1t
⎢
eAt = ⎢ 0
te λ1t e λ1t
t 2 e λ1t 2 te λ1t
⎤ 0⎥
⎥ 0⎥
⎢ ⎢
0
0
e λ1t
0
⎥ ⎥
⎢⎣ 0 0
0
e λ2t ⎥⎦
14
方法4 线性变换法求状态转移矩阵
(1) 线性变换的基本概念
对于
⎧ ⎨ ⎩
x y
= =
Ax cx
+
bu
作变换 x = Px P为非奇异(detP=0)线性变换矩阵
我们称这个过程为对系统进行P变换
线性变换的不变性:线性变换前后,系统的传递函数矩阵不变,特征方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绪论
本章结构 • 绪论
0.1 经典控制理论的特色与局限 0.2 现代控制理论的起源和发展 0.3 现代控制理论的研究内容 0.4 现代控制理论的应用
0.3 现代控制理论的研究内容
1 现代控制理论的研究内容
现代控制理论基础的内容为:
线性系统理论 最优控制理论 最优估计理论 系统辨识理论 自适应控制理论 智能控制理论 随机控制 鲁棒控制 非线性控制
绪论
本章结构 • 绪论
0.1 经典控制理论的特色与局限 0.2 现代控制理论的起源和发展 0.3 现代控制理论的研究内容 0.4 现代控制理论的应用
0.4 现代控制理论的应用
1 现代控制理论的应用
倒立摆稳定控制
单级倒立摆稳定控制
二级倒立摆稳定控制
0.4 现代控制理论的应用
1 现代控制理论的应用
飞行器研究
4 飞行器研究的关键问题
(1)飞行器建模问题
根据位移运动和绕质心的旋转运动,建立飞行器6自由度的运 动方程,3个线速度运动和3个角速度运动;
可以建立飞行器纵向、横侧向运动学方程,根据控制器设计的 需求,可以将方程建立为线性和非线性两类。
飞行器研究
4 飞行器研究的关键问题
(2)飞行器控制问题
1 现代控制理论的应用
网络控制
0.4 现代控制理论的应用
1 现代控制理论的应用
网络中心战中无人机担当重要任务:
侦察
电子干扰
欺骗(诱饵)
战场评估 通信中继 对地支援 对地攻击
0.4 现代控制理论的应用
1 现代控制理论的应用
研究分布式控制方法实现无人机协同编队飞行 并在实验室内搭建多无人机协调编队仿真网络
Evans美国电气 工程师,所从 事的是飞机导 航和控制
哥伦比亚大学 Bell Labs
Hendrik W. Bode
绪论
本章结构 • 绪论
0.1 经典控制理论的特色与局限 0.2 现代控制理论的起源和发展 0.3 现代控制理论的研究内容 0.4 现代控制理论的应用
0.2 现代控制理论的起源和发展
研究工具
分析方法 设计方法 其他
拉普拉斯变换
频域(复域),频率响应和根轨迹 法 PID控制和校正网络 频率法的物理意义直观
线性代数矩阵
复域、实域,可控和可观测 状态反馈和输出反馈 易于实现实时控制和最优控制
0.2 现代控制理论的起源和发展
3 现代控制的发展
(1)五十年代后期,贝尔曼(Bellman)等人提出了 状态分析法;在1957年提出了动态规划。 (2)1959年卡尔曼(Kalman)和布西创建了卡尔曼 滤波理论;1960年在控制系统的研究中成功地应用了 状态空间法,并提出了可控性和可观测性的新概念。 (3) 1961年庞特里亚金(俄国人)提出了极小(大) 值原理。
1 现代控制理论的应用
0.4 现代控制理论的应用
1 现代控制理论的应用
烧结基本工艺
余热 处理
抽风 烟囱 烟囱
余热处理
余热处理
抽风
配料
各种原料
混料
水
烧结
点火
筛分
给料
一次混合
二次混合
布料
烧结
热筛
冷却
冷筛
高炉
燃烧灰 热返料 冷返料
建立这6个环节的基于数据驱动的模型,来减小能耗, 降低有害气体的排放。
0.4 现代控制理论的应用
0.1 经典控制理论的特色和局限
1 控制的本质特征
r (t )
C(s) G(s)
r (t )
e(t )
控制器
u (t )
d (t )
执行器 过程 传感器
y (t )
反馈和算法是控制系统的本质特征
0.1 经典控制理论的特色和局限
2 经典控制的特点
r (t )
C(s)
G(s)
经典控制理论特点
研究对象 研究方法 研究工具 分析方法 设计方法 其他 单输入单输出系统(SISO),高阶微分方程 传递函数法(外部描述) 拉普拉斯变换 频域(复域),频率响应和根轨迹法 PID控制和校正网络 频率法的物理意义直观、实用
0.2 现代控制理论的起源和发展
3 现代控制的发展
(4) 罗森布洛克(H.H.Rosenbrock)、欧文斯 (D.H.Owens)和麦克法轮(G.J.MacFarlane)研究了使 用于计算机辅助控制系统设计的现代频域法理论,将经 典控制理论传递函数的概念推广到多变量系统,并探讨 了传递函数矩阵与状态方程之间的等价转换关系,为进 一步建立统一的线性系统理论奠定了基础 (5) 20世纪70年代奥斯特隆姆(瑞典)和朗道(法 国,ndau)在自适应控制理论和应用方面作出 了贡献。 与此同时,关于系统辨识、最优控制、离散时间系统 和自适应控制的发展大大丰富了现代控制理论的内容。
绪论
课程特点
• 基础概念多:
状态空间、稳定性、能控能观、实现、观测器、极点 配置、最优控制
• 理论性强:
矩阵理论
• 计算量大:
标准型实现、状态转移矩阵、能控能观判定
绪论
本章结构 • 绪论
0.1 经典控制理论的特色与局限 0.2 现代控制理论的起源和发展 0.3 现代控制理论的研究内容 0.4 现代控制理论的应用
1 现代控制的起源
在蓬勃兴起的航空航天技术的推动和计算机技术飞速 发展的支持下,控制理论在1960年前后有了重大的突 破和创新。在此期间,由卡尔曼提出的线性控制系统 的状态空间法、能控性和能观测性的概念,奠定了现 代控制理论的基础,其提出的卡尔曼滤波,在随机控 制系统的分析与控制中得到广泛应用; 20世纪50年代形成
劳斯(Routh)
赫尔维茨(Hurwitz)
0.1 经典控制理论的特色和局限
4 经典控制的奠基人
(3)由于第二次世界大战需要控制系统具有准确跟踪与补 偿能力,1932年奈奎斯特(H.Nyquist)提出了频域内研究 系统的频率响应法,为具有高质量的动态品质和静态 准 确度的军用控制系统提供了所需的分析工具。
4 飞行器研究的关键问题
(4)飞行器制导问题
红外制导
激光制导
制导:导引和控制飞行器按一定规律飞向目标或预定轨道的技术和方法。
制导过程中,导引系统不断测定飞行器与目标或预定轨道的相对位置关系, 发出制导信息传递给飞行器控制系统,以控制飞行。主要包括:雷达制导、 红外制导、激光制导、地磁制导、电视制导、惯性制导等。
耶鲁大学(Yale) Bell Labs
奈奎斯特
0.1 经典控制理论的特色和局限
4 经典控制的奠基人
(4)1948年伊万斯(W.R.Ewans)提出了复数域内研究系 统的根轨迹法。建立在奈奎斯特的频率响应法和伊万斯的 根轨迹法基础上的理论,称为经典(古典)控制理论(或 自动控制理论)
(5)Bode。目前IEEE中,控制的最高奖为Bode奖
现 代 控 制 理 论
绪论
主讲:窦立谦
绪论
课程结构与内容 • 绪论 • 第1章 控制系统的状态空间表达式
1.1 状态变量及状态空间表达式 1.2 状态空间表达式的模拟结构图 1.3 状态空间表达式的建立(一) 1.4 状态空间表达式的建立(二) 1.5 状态变量的线性变换 1.6 从状态空间表达式求传递函数 1.7 离散时间系统的状态空间表达式 1.8 时变系统和非线性系统的状态空间表达式
起飞 飞行器控制主要包括控制起飞、着落、 姿态、高度、速度、航向等内容,这 些控制需要调节飞行器上的各类舵机 来实现
姿态
着陆
飞行器研究
4 飞行器研究的关键问题
(3)飞行器航迹规划问题
飞行器航迹规划就是预先 或在线设定飞行器的飞行 路径。包括飞行路线、飞 行方向、飞行航点、航迹 的变更等
飞行器研究
0.1 经典控制理论的特色和局限
3 经典控制的局限性
r (t )
C(s)
G(s)
(1)难以有效地应用于时变系统 (2)难以有效地应用于多变量系统
(3)难以有效地应用于非线性系统
(4)难以实现最优控制
0.1 经典控制理论的特色和局限
4 经典控制的奠基人
(1)1868年马克斯韦尔(J.C.Maxwell)解决了蒸汽机 调速系统中出现的剧烈振荡的不稳定问题,提出了简单 的稳 定性代数判据。
第一个对反馈控制 系统的稳定性进行 系统分析并发表论 文的人
马克斯韦尔(J.C.Maxwell)
0.1 经典控制理论的特色和局限
4 经典控制的奠基人
(2)1877年和1895年劳斯(Routh)与赫尔维茨(Hurwitz) 把马克斯韦尔的思想扩展到高阶微分方程描述的更复杂的 系统中,各自提出了两个著名的稳定性判据—劳斯判据和赫 尔维茨判据。基本上满足了二十世纪初期控制工程师的需 要。
绪论
课程结构与内容 • 第4章 稳定性与李雅普诺夫方法
4.1 李雅普诺夫关于稳定性的定义 4.2 李雅普诺夫第一法 4.3 李雅普诺夫第一法 4.4 李雅普诺夫方法在线性系统中的应用 4.5 李雅普诺夫方法在非线性系统中的应用
绪论
课程结构与内容 • 第5章 线性定常系统的综合
5.1 线性反馈控制系统的基本结构 5.2 极点配置问题 5.3 系统镇定问题 5.4 系统解耦问题 5.5 状态观测器 5.6 利用状态观测器实现状态反馈的系统
航迹线路、 高优先级控 制指令
机载测控 分系统
操作员 地面监控系统
0.4 现代控制理论的应用
2 现代控制理论的发展趋势
控制理论的迅速发展,不断受到高科技需求的有力推动. 航天、航空、航海、工业过程、社会经济等领域向控制 理论提出了许多挑战性问题,例如Apollo 登月舱沿着最优
3.1 能控性的定义 3.2 线性定常系统的能控性判别 3.3 线性连续定常系统的能观性 3.4 离散时间系统的能控性与能观性 3.5 时变系统的能控性与能观性 3.6 能控性与能观性的对偶关系 3.7 状态空间表达式的能控标准型与能观标准型 3.8 线性系统的结构分解 3.9 传递函数阵的实现问题 3.10 传递函数中零极点对消与状态能控性和能观性的关系