基于ROS平台机器人导航避障系统设计与开发
ROS机器人编程及控制系统设计与开发

ROS机器人编程及控制系统设计与开发一、引言机器人操作系统(Robot Operating System,ROS)是一个灵活且强大的开源框架,旨在帮助开发者快速构建复杂的机器人应用程序。
ROS提供了一系列工具、库和约定,使得开发者可以轻松地编写机器人控制软件。
本文将深入探讨ROS机器人编程及控制系统设计与开发的相关内容。
二、ROS概述ROS最初是由斯坦福大学人工智能实验室(Stanford AI Lab)开发的,现已成为全球范围内最受欢迎的机器人软件框架之一。
ROS采用了分布式计算的思想,允许开发者在不同的节点之间进行通信和协作。
其设计理念包括节点(Node)、话题(Topic)、服务(Service)和参数服务器(Parameter Server)等核心概念。
三、ROS基础知识在开始ROS机器人编程之前,首先需要了解ROS的基础知识。
这包括安装ROS、创建工作空间、编写发布者和订阅者等。
通过简单的示例代码,可以帮助开发者快速上手ROS的使用。
四、ROS机器人编程1. ROS消息通信在ROS中,消息通信是节点之间进行数据交换的重要方式。
通过定义消息类型,并在发布者和订阅者之间传递消息,可以实现不同节点之间的信息传递。
常用的消息类型包括std_msgs中定义的基本数据类型,以及自定义消息类型。
2. ROS服务调用除了消息通信外,ROS还支持服务调用。
通过定义服务类型,并在客户端和服务器端之间进行请求和响应,可以实现节点之间更复杂的交互。
服务调用在一些需要请求-响应模式的场景下非常有用。
3. ROS参数服务器参数服务器是ROS中用于存储参数配置信息的地方。
通过参数服务器,可以实现对节点参数的动态配置和管理。
这为机器人控制系统提供了更大的灵活性和可配置性。
五、ROS控制系统设计与开发1. 传感器数据处理在机器人控制系统中,传感器数据是至关重要的。
通过使用ROS 提供的传感器驱动包,可以方便地获取传感器数据,并进行相应的处理和分析。
《2024年基于ROS的小场景移动机器人设计与实现》范文

《基于ROS的小场景移动机器人设计与实现》篇一一、引言随着机器人技术的快速发展,移动机器人在各种领域中得到了广泛的应用。
本文将重点讨论基于ROS(Robot Operating System)的小场景移动机器人的设计与实现。
通过合理的设计和精确的实现,我们的目标是为用户提供一个高效、稳定、智能的移动机器人平台。
二、系统需求分析在开始设计之前,我们需要对小场景移动机器人的需求进行详细的分析。
首先,机器人需要在小场景内进行自主导航和避障。
其次,机器人需要具备一定的运动控制能力,如前进、后退、左转、右转等。
此外,我们还需要考虑机器人的电池续航能力、负载能力、尺寸限制等因素。
最后,我们需要选择合适的硬件平台和传感器,以满足上述需求。
三、硬件设计根据需求分析,我们选择了一种小型的移动机器人平台,并配备了相应的传感器和执行器。
具体包括:1. 底盘:采用差速驱动的底盘设计,具有较高的运动灵活性和稳定性。
2. 电机与驱动器:选用高精度、低噪音的直流电机和驱动器,以保证机器人的运动性能。
3. 传感器:包括超声波测距传感器、红外线避障传感器等,用于实现机器人的自主导航和避障功能。
4. 控制器:采用基于ROS的控制器,通过串口或网络与机器人平台进行通信。
四、软件设计在软件设计方面,我们采用了ROS作为机器人的操作系统。
ROS具有丰富的功能包和灵活的通信机制,为机器人的开发和实现提供了极大的便利。
具体包括:1. 通信协议设计:为了实现机器人与控制器之间的通信,我们设计了一种基于ROS的通信协议。
该协议包括机器人状态信息的发布和接收、指令的发送等。
2. 导航与避障算法实现:我们采用基于超声波测距传感器和红外线避障传感器的算法实现机器人的自主导航和避障功能。
具体包括传感器数据的采集、处理和算法实现等。
3. 运动控制算法实现:我们通过ROS中的节点实现了机器人的运动控制功能。
这些节点包括前进、后退、左转、右转等基本运动指令的发送和接收等。
《基于ROS的智能工业机器人系统的设计与实现》
《基于ROS的智能工业机器人系统的设计与实现》一、引言随着科技的进步和工业自动化的快速发展,智能工业机器人系统在制造业中扮演着越来越重要的角色。
而机器人操作系统(ROS)作为一种开源的、灵活的机器人开发平台,为智能工业机器人系统的设计与实现提供了强大的支持。
本文将详细介绍基于ROS的智能工业机器人系统的设计与实现过程。
二、系统设计1. 需求分析在系统设计阶段,首先进行需求分析。
明确智能工业机器人系统的任务目标,包括物品搬运、加工、检测等。
同时,还需考虑系统的实时性、稳定性、灵活性以及扩展性等要求。
2. 系统架构设计基于需求分析,设计智能工业机器人系统的整体架构。
系统采用分层设计,包括感知层、决策层、执行层。
感知层负责获取环境信息,决策层进行数据处理和决策规划,执行层负责机器人的动作执行。
此外,系统还采用ROS作为开发平台,利用其强大的社区支持和丰富的开发资源。
3. 硬件设计根据系统需求和架构设计,选择合适的硬件设备,包括机器人本体、传感器、执行器等。
同时,考虑硬件的兼容性、稳定性以及成本等因素。
4. 软件设计在软件设计方面,利用ROS平台进行开发。
首先,设计机器人系统的通信机制,确保各部分之间的信息传递畅通。
其次,设计机器人系统的算法和模型,包括感知算法、决策算法、执行算法等。
最后,进行系统集成和调试,确保系统的稳定性和可靠性。
三、系统实现1. 感知层实现感知层主要通过传感器获取环境信息,包括视觉传感器、激光雷达等。
利用ROS提供的传感器驱动程序,实现对传感器的控制和数据的获取。
同时,利用图像处理、物体识别等技术,对获取的数据进行处理和分析。
2. 决策层实现决策层主要负责数据处理和决策规划。
利用ROS提供的各种算法库和工具,实现对数据的处理和分析。
同时,结合机器学习、深度学习等技术,实现决策规划功能。
在决策过程中,还需考虑机器人的运动学模型、动力学模型等因素。
3. 执行层实现执行层主要负责机器人的动作执行。
无人机路径规划与避障系统的设计与优化基于ROS和C语言

无人机路径规划与避障系统的设计与优化基于ROS和C语言一、引言随着无人机技术的不断发展,无人机在各个领域的应用越来越广泛。
而无人机路径规划与避障系统作为无人机飞行控制系统中至关重要的一部分,对于实现无人机的自主飞行至关重要。
本文将介绍基于ROS(Robot Operating System)和C语言的无人机路径规划与避障系统的设计与优化。
二、ROS简介ROS是一个灵活且强大的机器人操作系统,为机器人软件开发提供了丰富的工具和库。
ROS支持多种编程语言,其中C++和Python是最常用的两种。
通过ROS,开发者可以方便地构建机器人应用程序,包括路径规划、感知、控制等功能。
三、C语言在无人机控制中的应用C语言作为一种通用性强、效率高的编程语言,在无人机控制系统中也有着广泛的应用。
通过C语言编写的程序可以直接操作硬件,实现对无人机各个部件的精确控制。
在本文中,我们将结合ROS和C 语言,设计一个高效的无人机路径规划与避障系统。
四、路径规划算法1. A*算法A算法是一种常用的启发式搜索算法,广泛应用于路径规划领域。
该算法通过启发式函数估计从起点到目标点的最短路径,并在搜索过程中动态调整搜索方向,以找到最优路径。
在无人机路径规划中,A算法可以高效地找到避开障碍物的飞行路径。
2. RRT算法RRT(Rapidly-exploring Random Tree)算法是一种基于树结构的快速探索算法,适用于高维空间中的路径规划问题。
通过随机采样和树生长策略,RRT算法可以在复杂环境中搜索到可行的路径,并且具有较好的收敛性和鲁棒性。
五、避障系统设计1. 感知模块在设计避障系统时,感知模块起着至关重要的作用。
通过搭载传感器(如激光雷达、摄像头等),无人机可以实时获取周围环境信息,并将其转化为数据输入到路径规划模块中。
2. 避障策略基于感知模块获取到的环境信息,避障系统需要设计相应的避障策略。
常见的避障策略包括静态避障和动态避障,在飞行过程中及时调整飞行路径以避开障碍物。
基于ROS平台的移动机器人的设计与运动仿真

基于ROS平台的移动机器人的设计与运动仿真一、引言移动机器人是指能够在自由空间中进行导航和执行任务的机器人。
在工业生产、服务业、军事等领域中,移动机器人具有广泛的应用前景。
为了保证移动机器人的高效运动与精确控制,设计与仿真是非常重要的一步。
本文将介绍基于ROS平台的移动机器人的设计与运动仿真。
二、ROS(Robot Operating System)平台ROS是一个开源的机器人操作系统,提供了一系列工具和库,用于构建机器人应用的软件开发平台。
ROS提供了一种分布式软件架构,便于多个节点之间的通信和协作,对于机器人的控制、导航、感知和规划等方面都提供了相应的功能包。
三、移动机器人的设计1.机械结构设计:移动机器人的机械结构设计是实现机器人运动和执行任务的基础。
设计时需要考虑机器人的稳定性、载重能力、摩擦力等因素,选择适合的传动机构和关节结构。
2.传感器选择与布局:移动机器人需要通过各种传感器获取环境信息,包括但不限于激光雷达、摄像头、惯性测量单元等。
选择合适的传感器类型和数量,并合理布局在机器人上,可以提高机器人的感知能力和避障能力。
3.控制系统设计:移动机器人的控制系统设计包括硬件和软件两个方面。
硬件方面主要是选择合适的控制器和执行器,并设计相关电路和接口。
软件方面主要是根据机器人的运动需求编写控制算法,实现底层控制和导航功能。
四、移动机器人的运动仿真1.建立仿真模型:根据实际的机械结构和传感器布局,在ROS平台上建立移动机器人的仿真模型。
使用ROS提供的机器人建模工具,可以快速构建机器人的模型,并添加适当的传感器。
2.运动控制算法仿真:根据机器人的控制系统设计,编写运动控制算法,并在仿真环境中进行验证和测试。
通过与仿真模型进行交互,可以观察机器人的运动轨迹、姿态变化等,并对控制算法进行优化。
3.环境感知与避障仿真:通过在仿真环境中添加障碍物和环境信息,对机器人的环境感知和避障能力进行仿真测试。
《2024年基于ROS的机器人移动平台的设计与实现》范文
《基于ROS的机器人移动平台的设计与实现》篇一一、引言随着科技的快速发展,机器人技术已经深入到各个领域,其中机器人移动平台作为机器人技术的重要组成部分,被广泛应用于工业生产、医疗、服务等多个领域。
近年来,ROS(Robot Operating System)作为一款开放性的机器人开发平台,以其模块化、灵活性的特点受到了广泛的关注。
本文将基于ROS平台,详细介绍一款机器人移动平台的设计与实现。
二、需求分析在设计机器人移动平台之前,首先需要明确平台的使用需求和目标。
在此,我们的设计目标是构建一款能够在复杂环境中自主导航、灵活移动的机器人移动平台。
主要功能包括:自主导航、避障、路径规划等。
同时,考虑到平台的可扩展性和易用性,我们将采用模块化设计,使得平台可以方便地添加新的功能模块。
三、系统设计1. 硬件设计机器人移动平台的硬件部分主要包括底盘、电机、轮子、传感器等。
底盘采用铝合金材质,具有较高的承载能力和稳定性。
电机选用高性能无刷电机,配合轮子实现平稳的移动。
传感器部分包括激光雷达、超声波传感器等,用于实现自主导航和避障功能。
2. 软件设计软件部分采用ROS平台进行开发。
首先,在ROS中创建一个新的工作空间,并添加所需的ROS包。
然后,设计各个模块的通信接口和功能实现。
主要模块包括运动控制模块、传感器数据处理模块、导航模块等。
运动控制模块负责控制电机的运动,传感器数据处理模块负责处理传感器数据并生成导航信息,导航模块则根据传感器数据和地图信息实现自主导航和避障功能。
四、系统实现1. 硬件实现根据硬件设计图,完成机器人移动平台的组装和调试。
确保底盘平稳、电机运转正常、传感器工作稳定。
2. 软件实现在ROS中编写各个模块的代码,实现各个模块的功能。
运动控制模块通过ROS的节点(Node)和发布者(Publisher)实现电机的控制;传感器数据处理模块通过订阅者(Subscriber)获取传感器数据,并进行处理和计算;导航模块则根据地图信息和传感器数据实现自主导航和避障功能。
基于ROS的家庭服务机器人导航控制系统设计分析
基于ROS的家庭服务机器人导航控制系统设计分析摘要:本文简要分析导航控制系统的软硬件设计,并基于ROS对家庭服务机器人导航控制系统进行设计分析,主要包括系统通信机制、传感器信息发布以及导航系统实现等方面,期望能够为相关人员提供参考。
关键词:ROS系统;家庭服务机器人;导航控制系统引言:为了让家庭服务机器人能够更好地面对室内环境,保护室内安全,需要为其设计一个导航控制系统,以此来对其进行导航控制。
而对ROS的家庭服务机器人导航控制系统展开设计分析,则能为导航控制系统设计提供依据,继而为提升家庭服务机器人智能水平提供便利。
1.硬件设计硬件设计平台采用的是差速轮移动平台。
差速轮的移动平台是指移动机器人实体,例如人体的结构。
差动轮移动平台包括电子系统、步进电机、主控板、差速轮、电子传感器、机械硬件结构以及步进电机驱动器等等组成[1]。
2.软件设计在设计移动机器人时,不管是安保机器人、家庭服务机器人,还是仓储机器等,都有非常相似的基本设计思想,但它们的功能和技术实现根据不同的应用场景而有所不同。
这三种移动机器人的主要任务是实现移动性。
机器人通过大脑对外部传感器获取的数据信息进行处理,并且机器人控制处理器可以使用软件算法对数据进行评估,然后进行决策。
3.导航控制系统设计3.1系统通信机制ROS使用的通信方法是消息和服务[2]。
消息从一个节点发布到主题,消息的其他节点必须订阅主题才能接收消息。
服务和消息不同。
服务呼叫通信有两个主要节点,即客户端节点和服务器节点。
在通信中,客户端节点向服务器节点发送一些请求信息,服务器节点等待服务器节点响应。
在通信传输中通过接收数据线、地线以及发送数据线三线展开连接。
此外,串口通信采用异步通信状态。
发送端和接收端可以在没有相互影响的情况下同时动作。
在串口通信中,必须测量传输系统的重要参数。
当计算机和单片机通过串口通信时,这两台机器之间的参数必须相同,否则计算机和单机之间就没有有效和安全的数据传输。
《基于ROS的机器人移动平台的设计与实现》范文
《基于ROS的机器人移动平台的设计与实现》篇一一、引言随着科技的不断发展,机器人技术已经逐渐渗透到各个领域,其中机器人移动平台作为机器人技术的重要组成部分,其设计和实现显得尤为重要。
本文将介绍基于ROS(Robot Operating System)的机器人移动平台的设计与实现,通过分析系统需求、设计思路、硬件构成、软件架构、实现方法及测试结果等方面,展示一个高效、稳定、可靠的机器人移动平台的实现过程。
二、系统需求分析在设计和实现机器人移动平台的过程中,首先需要进行系统需求分析。
本系统主要面向室内外环境下的移动机器人应用,需要满足以下需求:1. 自主导航:机器人能够根据环境信息自主规划路径,实现自主导航。
2. 稳定控制:机器人需要具备稳定的运动控制能力,以确保在复杂环境下能够安全、可靠地运行。
3. 兼容性强:系统需要具备良好的兼容性,能够与其他机器人模块(如传感器、执行器等)进行无缝集成。
4. 易于扩展:系统应具有良好的扩展性,方便后续功能的添加和升级。
三、设计思路基于上述需求分析,我们设计了一套基于ROS的机器人移动平台。
该平台采用模块化设计思想,将机器人分为运动控制模块、传感器模块、执行器模块等,各个模块之间通过ROS进行通信,实现信息的共享和协同。
同时,我们采用了先进的导航算法和运动控制策略,以确保机器人在各种环境下都能实现自主导航和稳定控制。
四、硬件构成机器人移动平台的硬件构成主要包括底盘、电机、轮子、传感器等。
底盘采用轻质材料制成,以降低机器人重量;电机和轮子负责驱动机器人运动;传感器则用于获取环境信息,为机器人的自主导航和稳定控制提供支持。
五、软件架构软件架构方面,我们采用了ROS作为机器人的操作系统,通过ROS提供的通信机制,实现各个模块之间的信息共享和协同。
同时,我们开发了相应的ROS节点,负责实现机器人的自主导航、运动控制等功能。
六、实现方法及测试结果通过《基于ROS的机器人移动平台的设计与实现》篇二一、引言近年来,随着科技的发展,机器人技术日益受到重视,其在各种应用场景下的功能性与便利性逐渐凸显。
基于ROS的开源移动机器人系统设计
基于ROS的开源移动机器人系统设计ROS(Robot Operating System)是一个开源的机器人操作系统,广泛应用于各种移动机器人平台。
在设计基于ROS的开源移动机器人系统时,需要考虑机器人的硬件平台、软件架构、传感器集成、控制与导航等方面。
一、硬件平台设计硬件平台是移动机器人系统的基础,需要根据具体需求选择适合的硬件组件。
常见的硬件组件包括电机、传感器(如激光雷达、摄像头、惯性测量单元等)、嵌入式控制板等。
硬件平台的设计需要考虑机器人的尺寸、载重、功耗等特性,同时要与ROS兼容。
二、软件架构设计在基于ROS的移动机器人系统中,软件架构设计起着关键作用。
可以采用分层架构,类似于ROS自身的设计。
常见的软件架构包括感知层、规划层、执行层等。
感知层负责获取机器人周围环境的信息,规划层负责生成机器人的路径规划,执行层负责执行路径规划控制机器人运动。
此外,还可以设计上层的用户界面和运维管理模块。
三、传感器集成设计移动机器人系统通常需要使用多种传感器,如激光雷达、摄像头、惯性测量单元等。
传感器集成设计需要考虑硬件的连接和通信协议,以及软件的驱动和数据处理。
在ROS中,可以使用ROS官方提供的传感器驱动包,也可以自行开发传感器驱动。
四、控制与导航设计控制与导航是移动机器人系统的核心功能。
在ROS中,可以使用导航栈(Navigation Stack)实现机器人的路径规划和导航。
路径规划可以使用ROS导航栈中提供的全局路径规划器(Global Planner)和局部路径规划器(Local Planner)来完成。
导航栈还提供了定位功能,可以使用SLAM(Simultaneous Localization and Mapping)算法实现机器人的自主定位。
五、模块和功能的扩展基于ROS的开源移动机器人系统非常灵活,可以根据具体需求扩展功能和添加模块。
可以使用ROS的Package和Node机制,将整个系统划分为多个独立的功能模块,每个模块运行在一个独立的Node中,通过ROS的消息机制进行通信。
基于ROS的机器人控制系统设计与实现
基于ROS的机器人控制系统设计与实现机器人已经成为了现代工业、军事、服务等领域不可缺少的一部分,随着其应用范围越来越广泛,对机器人控制系统的技术要求也越来越高。
当前,ROS(Robot Operating System)被广泛应用于机器人控制系统的开发和实现,本文将介绍基于ROS的机器人控制系统的设计和实现。
ROS介绍ROS是一个开源的、底层模块化的、分布式的机器人操作系统。
ROS提供了一套底层的机器人操作系统和一系列支持工具、库和驱动程序。
通过ROS,用户可以简单地编写机器人相关的应用程序,并可以通过ROS的多重实现方式轻松实现机器人的开发、集成和测试。
ROS的设计理念是基于发布/订阅机制和服务/客户端机制,即用户可以通过发布/订阅机制来传输消息和数据,通过服务/客户端机制来传输请求和响应。
这种设计使得ROS具有高度的灵活性和可扩展性,能够支持多种底层硬件和传感器,以及多种机器人操作和控制。
ROS的机器人控制系统设计基于ROS的机器人控制系统设计需要考虑下列几个方面。
一、硬件平台的选择机器人控制系统的硬件平台包括机器人的底盘、传动、电机等,需要依据机器人的应用场景进行选择。
常见的机器人控制硬件平台有Turtlebot、Robotic Arm等,用户可以根据需求选择合适的硬件平台。
二、机器人控制系统架构设计机器人控制系统架构设计需要考虑机器人的功能需求和ROS的分布式服务体系。
ROS节点是实现ROS机器人的主要组成部分,它们能够通过ROS通信协议进行数据和消息传输。
因此,设计架构时需要充分考虑ROS节点的分布式特性,将各个节点进行适当的分离,实现节点的互联。
三、编程语言和工具选择ROS支持多种编程语言和工具,常用的编程语言有C++、Python等,常用的工具有ROS Command Line Tools、Rviz、Gazebo等。
选择编程语言和工具需要根据自身需求、开发经验和可支持的平台进行选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基 金 项 目 :2016 年 教 育 部 产 学 合 作 协 同 育 人 项 目 (201602014005);2016 年度辽宁省教学改革建 设项目;大连大学 2016 年度教学改革建设项目
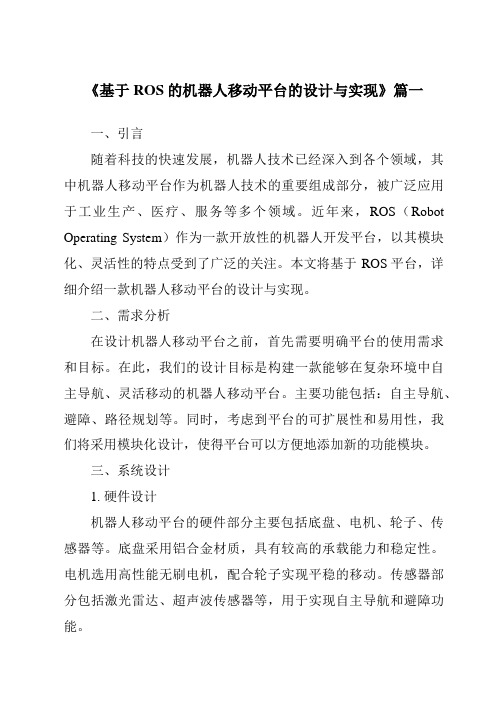
有两种 选择:一 罗技 种 是 上 C920
桌面PC
位机直 接随机 运 行 ,另
RPIidarAl CY910
Keywords: mobile robots; ROS platform; fuzzy BUG2 algorithm;navigation; obstacle avoidance
0引言 移动机器人在生产制造企业、物流公司等进行金属焊
接、产品检测、物料搬运应用普遍,多台机器人同时工作 时,其进行路径优化和避障等功能能够提高移动机器人的 使用可靠性和提高工作效率[1-7]。ROS平台是面向工业机器 人的开源式平台,提供了强大的机器人二次开发功能。本 文基于ROS平台,对移动机器人进行了路径优化和导航研 究,应用C++语言开发了避障导航功能,经测试证明移动机 器人的导航避障功能具有可实现性和可靠性。 1 移动机器人导航避障系统设计 1.1 控制系统平台设计
odometer, wheel odometer and IMU odometer, then the position of mobile robot is accurately determined by AMCL
algorithm. Using A* algorithm for global path planning and DWA algorithm for local path planning, the fuzzy BUG2
条躲避缓慢移动障碍物、全局较优路径。
关键词:移动机器人;ROS平台;模糊BUG2算法;导航;避障
中图分类号:TP 249
文献标志码:粤
文章编号:员园园圆原圆猿猿猿(圆园员9)员园原园016原园3
Design and Development of Robot Navigation and Obstacle Avoidance System Based on ROS Platform
机械工程师
MECHANICAL ENGINEER
基于ROS平台机器人导航避障系统设计与开发
贾卫平, 盖欣桐, 张祥, 赵洪健, 黄式贤 (大连大学 机械工程学院,辽宁 大连 116622)
摘 要:基于ROS工业机器人开源平台,应用C++语言进行了移动机器人导航避障系统的设计与开发。选用激光雷达作为
位置传感器,融合视觉里程计、轮式里程计和IMU里程计三大里程计数据,采用传统定位与SLAM算法创建地图,应用
algorithm is used as the core algorithm to realize the integration of local obstacle avoidor into ROS planning system. The
tests of navigate and avoid obstacles are carried out at two points of the mobile robot Robotino on the map using the C++
JIA Weiping, GAI Xintong, ZHANG Xiang, ZHAO Hongjian, HUANG Shixian
(College of Mechanical Engineering, Dalian University, Dalian 116622, China)
Abstract院Based on ROS industrial robot open source platform, the navigation and obstacle avoidance system is designed
and developed using C++ program language on the mobile Rototino. Laser radar is selected as the position sensor, the map
is created by SLAM algorithm and traditional position which combines with these three major odometers data of visual
AMCL算法准确确定移动机器人位置;对移动机器人使用A*算法进行全局路径规划、DWA算法进行局部路径规划,并且使
用模糊BUG2算法作为核心算法实现局部避障器融入ROS规划系统中,应用C++语言开发程序,在移动机器人Robotino在
地图上的两个点进行导航和避障测试。结果表明,器人可以规划出一
language development program. The results show that the relative motion speed between the robot and the obstacle is
reasonably set, the mobile robot can plan a globally optimal path to avoid obstacles slowly.
一种是 脱机运
9个接近 传感器
行 [8]。 综
1对金属
合成本、 传感器
TCP/IP 能源
编码电动机1
电动机 STM32F407 驱动模块
编码电动机2
舵机
编码电动机3
复杂性 等因素, 本研究
1对巡线 传感器
控制系
图1 控制系统设计方案
统采用脱机控制。将主要的算法放在桌面PC上运行,选用