底层柔性结构振动控制研究综述
旋转柔性梁系统振动频响特性分析及振动抑制
滞补偿并和低通滤波器的复合加速度 比例反馈 和 P F P 控制算法 ; 然后 , 建立 的系统 的实验平 台, 进行 了系统 振 动 的模态 分 析 , 有色 噪声 的振 动 特性 分 析 , 于 扫描 基 正弦信号的动态频响特性 分析 , 出了系统振动幅值 给 动态 特性 , 控制 器设 计 时参 数 的 选取 提 供 了参考 ; 为 最 后, 对挠性转动梁系统 , 利用所设计 的控制律进行了基 于加 速度 传感 器反 馈 的位 置设 定 点 的振 动控 制 和 转 动 过程 的振动控制 , 取得 了较好 的实验结果 , 振动被快速
基 金 项 目: 国家 自然 科 学 基 金 资助 ( 00 0 0 ; 家 自然 科 学 基 金 空 天 飞 6 44 2 ) 国
行器 重 大 研 究 计 划 资 助 ( 0 0 04) 广 东 省 自然 科 学 基 金 资 助 9551 ;
( 504 9 00 6 9 )
收稿 日 : 0 7 0 — 8 修改稿收到 日 : 0 —1 2 期 20 — 6 0 期 2 意 图
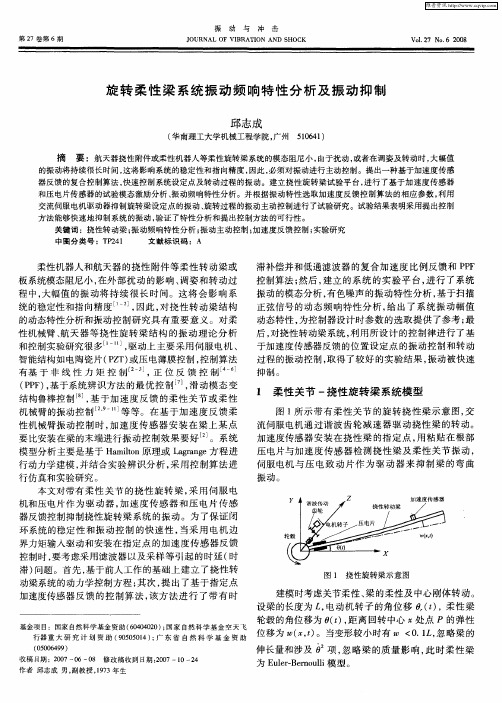
建模时考虑关节柔性 、 梁的柔性及 中心刚体转动 。 设梁 的长度 为 £ 电动机转子的角位移 () 柔性梁 , t, 轮毂的角位移为 0 t , () 距离 回转 中心 处点 P的弹性
位 移 为 ( £ 。当变形 较 小 时有 < . L 忽 略梁 的 ,) 0 1,
板 系统模 态 阻尼小 , 在外 部扰 动 的影 响 、 姿 和转 动 过 调
程中, 大幅值 的振 动将持续 很长时 问。这将会影 响系 统 的稳定 性 和指 向精 度 J 因此 , 挠 性 转 动 梁 结 构 , 对 的动态特 性分 析 和振 动控 制研 究 具 有 重要 意义 。对 柔 性机 械臂 、 天 器 等 挠 性 旋 转 梁 结 构 的 振 动 理 论 分 析 航 和控制实验研究很多¨ , 驱动上主要 采用伺服电机 、 智 能结 构如 电 陶瓷 片 ( Z ) 压 电薄 膜控 制 , PT 或 控制 算 法
基于输入成形的柔性航天器振动闭环抑制方法研究

) =∑A (一 ) it 0 6
J= 12 … , - ,, Ⅳ () 2
多脉 冲序 列 ( ) 用 于 系统 ( ) 其 中 A、f分 别 2作 1, , , 为第 个脉 冲的 幅值 和作用 时刻 , 最后 一个 脉 冲作 用 在 时间 t , 时 系统 残余振 动 的幅值为 :
G() s
() 1
其 中 为系统 自然振 动频率 , 为系统 阻尼 比。
附件的模态振动频率和阻尼 比设计输入程序器 , 以 难 从理论上保证对残余振动的抑制效果。 本文考虑上述影响 , 将输入成形和反馈控制相结
基金项 目:“ 十一五” 预研背景项 目( 100 0 ) 国家博士后科 学基金 13 2 12 , (0 74 06 ) 教育部创新 团队资助项 目(R D 2 ) 2 00 125 , I1 5 O 资助课题 收稿 日期 :2o O o 9一 2—1 3
的稳定度 和 精度 。在 过 去 的 几 十年 里 , 空 间柔 性 结 对
构的振 动主 动控 制 方法 研 究 主 要集 中在 反 馈 控 制改善 航天 器 的机 动 时 间 , 提高 系统性 能对参 数摄 动的鲁棒 性 。
像 自适应控制 、 J鲁棒控制[ 、 2 非线性控制 及复合控 1
种改 进型 的输入 成 形 器 , 应用 于 柔 性 机 械臂 的运 动 并
控制 。
受 的残余 振动, 中脉 冲序列称为输入成形器 (nu 其 I t p s pr , h e)脉冲序列 的作用时间和 幅值根据系统的模态 a 频 率和 阻尼 比得 到 。简单 的原 理示 意图见 图 1 。
摘 要 :针对柔性航天器姿态机动时柔性附件的振动抑制问题, 提出一种基于输入成形和反馈控制联合的主动振
智能结构振动控制方法的研究与应用

智能结构振动控制方法的研究与应用从古至今,人类一直在探索如何控制和减小结构振动的问题。
随着科技的发展和工程应用的深入,智能结构振动控制方法成为一个热门的研究领域。
智能材料和智能控制系统的引入,使得结构振动控制的效果得以极大地提升,为实现高性能、高安全性的工程结构打下了坚实的基础。
一、智能材料在结构振动控制中的应用智能材料是指具有感知、计算、决策和执行功能的材料,能够对外界环境做出响应并做出相应动作。
在结构振动控制中,智能材料被广泛应用于两个方面:传感和执行。
1. 传感传感是指通过对结构振动进行检测和测量,获取振动信号的过程。
智能材料通过其感知功能,可以将结构振动转化为电信号,进而实现对振动的实时监测和分析。
比如,智能传感器可以被灵活地集成到结构中的关键部位,以实时监测结构的振动状态和变形情况。
这些获得的振动信号可以被传输到控制系统中用于判断结构的健康状况和进行结构振动控制。
2. 执行执行是指通过对结构施加外界力和扭矩,对结构振动进行控制和调整的过程。
智能材料具有自适应性和可编程性的特点,可以在作用下改变其力学性能,从而可以对结构振动发挥积极的调节作用。
比如,智能材料可以在感知到结构振动后,自动调整其刚度或阻尼特性,以减小结构的振动响应。
另外,智能材料还可以通过对外界激励作出相应的形变,从而实现被动式和主动式的结构振动控制。
二、智能控制器系统在结构振动控制中的应用智能控制器系统是指采用智能算法和控制器设计的系统,在控制结构振动过程中发挥重要作用。
1. 智能算法智能算法是指基于人工智能和模糊控制理论设计的算法。
在结构振动控制中,智能算法可以根据传感器监测到的振动信号进行分析和处理,从而得到结构的振动特性和系统动力学模型。
在对结构进行振动控制时,智能算法可以根据系统模型和控制要求,自动地调整控制器的参数和输出信号,以实现对结构的优化控制。
2. 控制器设计控制器是智能控制器系统的核心部分,用于对结构振动进行有效的抑制和控制。
柔性机器人动力学建模与控制

柔性机器人动力学建模与控制引言:随着科技的不断进步和人工智能的不断发展,机器人已经在我们的生活中扮演越来越重要的角色。
传统的机器人主要由硬性材料组成,而柔性机器人则是一种新型的机器人,其主要特点是拥有柔软的身体结构和优良的运动灵活性。
柔性机器人的动力学建模和控制是该领域的研究热点之一。
本文将探讨柔性机器人动力学建模与控制的一些基本概念和方法。
一、柔性机器人的动力学建模柔性机器人由于其柔软的结构,其动力学建模相对于传统机器人要更加复杂。
动力学建模是指描述机器人运动的力学方程,包括力、力矩和质量等因素。
对于柔性机器人来说,不同部位的柔软程度和柔性材料的特性都需要考虑进去。
1. 刚体动力学模型柔性机器人在某些情况下可以近似为刚体,这时可以采用刚体动力学模型进行建模。
刚体动力学模型基于牛顿定律,将机器人的运动建模为质量、惯量和力矩之间的关系。
2. 弹性扭转动力学模型柔性机器人的主要特点之一是柔性材料的扭转弹性。
为了描述柔性机器人的扭转特性,可以采用连续杆模型来建模。
连续杆模型将柔性机器人的身体分割为多个小段,每个小段可以近似为刚体。
通过综合考虑每个小段的质量、刚度、扭转角度和扭转力矩,可以得到柔性机器人的整体动力学方程。
3. 有限元模型有限元模型是一种常用的柔性机器人动力学建模方法。
该方法将柔性机器人的结构离散化,将其划分为多个小单元,每个小单元可以看作是一个刚体。
通过求解有限元方程,可以得到柔性机器人的运动方程。
二、柔性机器人的控制方法柔性机器人的控制是指通过对机器人的运动进行控制和调节,以达到所需的运动目标。
对于柔性机器人来说,由于其柔软的结构,控制方法相对复杂。
1. 位置控制位置控制是柔性机器人最基本的控制方法之一。
通过对机器人的关节位置进行调节,可以实现机器人的运动。
对于柔性机器人来说,由于其柔软的结构,位置控制相对困难,需要考虑到机械振动和松弛现象的影响。
2. 力控制力控制是柔性机器人广泛应用的一种控制方法。
浅谈建筑结构振动控制

浅谈建筑结构振动控制摘要:文章从不同角度对结构振动控制进行了分类,介绍了其发展与现状,并对近年来控制理论在结构控制方而的新进展给以综述,最后对有待进一步研究的问题进行了探讨,以促进结构振动控制的研究。
关键词:结构振动控制;自主控制;上木工程结构abstract: this article from a different perspective on the structural vibration control classification, its development and status, and give summarized in the the structure controlling party and the new advances in control theory in recent years, last discussed the issue needs further study .to promote the study of the structural vibration control.key words: structural vibration control; self-control; engineering structures on wood中图分类号:c935 文献标识码:a 文章编号:2095-2104(2012)结构振动控制是一个应用领域广泛的工程问题。
所谓结构振动控制(以下称为结构控制)是指采用某种措施使结构在动力载荷作用下的响应不超过某一限量,以满足工程要求。
结构控制问题是一种多学科交叉的理论与工程问题,其结构类型繁多、控制目标不同、实现手段多样。
目前,国内外控制界对这类问题的研究十分重视,有大量的学术论文发表,其中不少新结果得到了实际工程应用。
本文旨在对当前结构控制的一此新进展加以综述,并对此有待进一步研究的问题给以归纳。
一、结构控制的特点、发展与现状(一)按控制对能量需求来划分从控制对外部能量需求的角度,结构控制可分为:被动结构控制、主动结构控制、混合结构控制、半主动结构控制。
海洋平台结构振动控制研究综述

析 、数值模拟 以及模型实验进行研究 。
同设置方式对平 台动力特性 的影响 。结果表 明, 设置组
主 动控 制装置主要有 主动质量阻尼器( M ) A D 、混合 合跨粘弹性耗 能斜撑 的J 2—2 Q平台结构可 以达 到 Z 0 MU 质量阻尼器( M ) H D 等。 如下 的冰振控 制效果 : 压冰力作 用下, 台结构 的位 挤 平
c n r lo fs r l to l1 n oc s so he p s i e c nto , ci e c nto nd s mia tv on r lt c n l y o to f0f ho e p a f r S a d f u e n t a sv o r l a tv o r la e . ci e c to e h o og . T
收 稿 日期 :2 1 02
D sg e in& D v lp n e eo me t设 计达到减 振 目的 。被 3 海 洋平 台结构 振 动控 制研 究状 况
动控 制构 造简单 ,造价低 廉 ,易 于维护 并且无需 外部
海洋 平 台安 置 于无遮蔽 的海 洋环境 里 ,长期遭 受 能源输 入等优点 而受到 了广泛 的研究 与应用 ,其技术 风 、波 浪 、水 流等 的影 响 ,在 恶劣条件 下 ,还 会遭 到 已非 常 成 熟 。被 动 控 制 主要 分 为 基 础 隔振 、耗 能减 地震 以及 坚冰 的作用 ,这些外 部荷载 引起 了海 洋平 台
. 具有 不确 定性 。平 台结构 受 到较 大外 部激励 ,可 能会 21 被 动控 制 被 动控制 无需 外加 能源 ,其 控制力 是控 制装 置随 产 生过大 的振 动响 应 ,影 响人 员安全 ,降低 平 台使用
性 能 ,甚 至导 致结 构疲劳 破坏 。 因此 ,利用 合适 的减
组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告

组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告一、研究背景柔性机械臂具有结构灵活、可冗余、质量轻等优点,在机器人领域中具有广泛应用前景。
然而,在实际应用过程中,柔性机械臂所带来的振动问题给控制系统带来了很大的挑战。
因此,研究柔性机械臂的动力学特性和振动抑制性能,对其优化设计和精确控制具有重要意义。
二、研究目的本文旨在:1. 深入探究柔性机械臂的动力学特性,分析和建立柔性机械臂的动力学模型。
2. 研究柔性机械臂的振动抑制性能,探究影响柔性机械臂振动的因素及其对振动抑制的影响。
3. 组合动力学与振动抑制分析,提出有效的柔性机械臂振动抑制方法并进行实验验证。
三、研究内容本文将围绕柔性机械臂的动力学特性和振动抑制性能展开研究工作,具体包括以下内容:1. 对柔性机械臂的动力学特性进行深入分析,在建立动力学模型的基础上模拟分析柔性机械臂的运动学和动力学特性。
2. 探究柔性机械臂振动的原因,包括结构刚度、质量分布等对柔性机械臂振动的影响,并对振动抑制技术进行综述。
3. 基于系统鲁棒控制的方法,提出柔性机械臂的振动抑制控制方法。
设计集中式控制器并验证其有效性。
4. 通过实验验证柔性机械臂的动力学特性和振动抑制性能,并与其他已有的方法进行比较,以评估所提出的方法的有效性和实用性。
四、研究意义本文研究的柔性机械臂动力学特性和振动抑制性能对提升柔性机械臂的精度和控制能力具有重要意义,具体有以下几点:1. 深入研究和掌握柔性机械臂的动力学特性和振动抑制技术,有助于优化柔性机械臂设计,提高其控制精度。
2. 所提出的柔性机械臂振动抑制控制方法,为柔性机械臂的实际应用提供了一种新的控制途径,具有重要的理论和实用价值。
3. 相关研究成果可以为机器人领域中的其他柔性结构的动力学分析和振动抑制技术提供有益借鉴和参考。
五、研究方法和技术路线本研究主要采用理论分析和实验验证相结合的方法,具体技术路线如下:1. 对柔性机械臂的动力学特性和振动抑制技术进行综述和分析,总结相关理论和方法。
振动控制-主动、半主动

振动控制-主动、半主动⽬录0.前⾔ (1)0.1 结构振动控制研究与应⽤概况 (1)1.结构振动主动控制、半主动控制 (2)2.结构振动控制分类 (3)3.各类控制系统构造及性能 (4)3.1 结构振动主动控制概述 (4)3.1.1 主动控制控制原理 (5)3.1.2 加⼒⽅式及加⼒位置 (7)3.1.3 控制装置 (8)3.2 结构振动半主动控制概述 (8)4.结构振动主动控制、半主动控制算法 (11)4.1 主动控制算法 (12)4.1.2 ⼏种算法的简单介绍 (13)4.2 半主动控制算法 (21)4.3 智能控制算法 (22)5.结构主动、半主动控制系统分析⽅法及设计⽅法 (24)5.1 主动控制系统的最优控制⼒设计与分析 (25)5.1.1 主动控制系统的最优控制⼒设计 (25)5.1.2 主动最优控制⼒和受控反应特征分析 (26)5.2 结构主动变阻尼和智能阻尼控制系统的最优控制⼒设计与分析 (30) 5.2.1半主动最优控制⼒设计 (31)5.2.2系统反应分析 (36)5.3 结构主动变刚度控制系统的最优控制⼒设计与分析 (37)5.3.1主动变刚度最优控制⼒设计 (37)5.3.2系统反应分析 (40)6.结构振动主动控制、半主动控制系统的⼯程应⽤ (41)6.1 AMD控制系统的⼯程应⽤ (41)6.2 结构主动变刚度控制系统的⼯程应⽤ (41)6.3 结构主动变阻尼控制系统的⼯程应⽤ (42)6.4 其他结构振动控制系统的⼯程应⽤ (42)7.研究展望 (43)7.1 结构振动主动控制、半主动控制的研究与发展⽅向 (43)7.2 结构振动控制的有待研究的问题 (43)8.结语 (43)参考⽂献 (44)主动控制、半主动控制综述0.前⾔0.1 结构振动控制研究与应⽤概况结构振动控制技术与传统的依靠结构⾃⾝强度、刚度和延性来抵抗地震作⽤的做法不同,通过在结构中安装各种控制装置,从⽽达到减⼩结构地震反应、保障结构地震安全的⽬的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
底层柔性结构振动控制研究综述
摘要:
文章对高层建筑底部大空间柔性结构的抗震性能进行了分析,高层上部结构与底部结构的侧向刚度差异较大,新型延性构件的出现给底部柔性结构的抗震研究提供了新的思路。
从技术上、材料上对这一问题进行研究,给出几种可行的方案,综合论述底层柔性结构今后的发展方向。
关键词:底层结构抗震延性支撑减震系统阻尼器
中图分类号: tu3 文献标识码: a 文章编号:
1 问题综述
随着城市建设的发展,城市中楼房的数量和密度日益增加。
大量住宅的建成,必然要有相应的社会性公用建筑与之配套,如商店、食堂、餐厅、托儿所、幼儿园、办公及水电设备用房等。
如果在高层建筑的底部不能形成空间用以解决部分上述用房,便需在规划上另行布置大量附属建筑。
由于城市规划要求、建筑使用功能和用地紧张等方面的原因对于临街的住宅和办公楼,一般均要求在底层设置商店、车库等底部大空间结构。
底层大空间建筑,其上部作为住宅、写字楼,下部作为商业用房,具有优越的使用功能,在实际工程中大量存在。
但是,底层大空间结构体系的底层侧向刚度远小于上部的侧向刚度,形成上刚下柔的底层柔性结构。
在水平地震作用下,底部变形集中,震害严重,甚至在底部倒塌。
同理,底层框架砖房由两种不同的承重及抗侧力体系构成:上部砖房为较刚性的砖
房,抗侧刚度大;底部为较柔性的框架,开间大,抗震墙少,抗侧刚度小,易成为变形集中的薄弱楼层。
《建筑抗震设计规范》依据震害经验及其结构特点,对底层框架砖房的总高度和总层数都作出了明确限制。
文献[1]对汶川地震中广元市底层框架结构房屋的震害进行了调查和分析,结果表明广元市21幢底层框架结构中有一半发生了中等以上的破坏,主要破坏部位为结构的薄弱底层和二层过渡层,由于设计未考虑框架梁能与上部墙体组合受力,致使底层框架梁尺寸偏大,结构出现了“强梁弱柱”现象。
2 提高结构延性技术
过去相当长时间内,抗震技术是沿用“硬抗”的途径,即采用加强结构、加粗构件断面、加多构件配筋等提高结构刚度等方法来抵抗地震,但新的延性构件的出现大大改进了传统的做法。
2.1 底层加设支撑
研究表明:底层支撑对底层薄弱层位移有良好的控制效果;底层支撑的存在使顶点位移在正、负两向有相近的值;底层支撑设置量存在一个较优的比例,按此比例设支撑后,层间位移分布较均匀,最大层间位移正、负两向总均值较小,顶点位移得到有效的控制,p-效应较小。
文中给出的该结构底层支撑的合理设计原理和方法可供抗震设计参考。
由于使用功能空间的限制,增设的支撑耗能能力有限,有时尚不能满足结构的抗震性能需求。
2.2 带暗支撑剪力墙
暗支撑是指在普通剪力墙配筋基础上,加配暗支撑纵筋和箍筋,
形成钢筋混凝土核芯柱,有x形、人字形和八字形。
地震时暗支撑作为第一道防线首先进入屈服,除其弹塑性变形可消耗能量外,更主要的是它有效地限制斜裂缝开展,使斜裂缝均匀分布,具有较好的抗震耗能能力。
在混凝土开裂前的弹性阶段,带暗支撑剪力墙结构的抗震性能与普通剪力墙结构基本相同;在混凝土开裂后的弹塑性阶段,带暗支撑剪力墙结构的结构抗力明显大于普通剪力墙结构的结构抗力,带暗支撑剪力墙结构模型的底层最大层间位移反应比普通剪力墙结构模型的底层最大层间位移反应显著减小。
但该方法只适用于剪力墙结构或框架-剪力墙结构。
2.3 钢管混凝土耗能低剪力墙
钢管混凝土耗能低剪力墙与普通整截面低剪力墙相比,抗震性能明显提高,其弹性刚度和极限承载力较普通剪力墙降低不多,但变形和耗能能力大大提高。
该耗能低剪力墙用于底层框剪砌体结构抗震时,能充分利用钢管混凝土柱的良好滞回性能,消耗地震能量,保护上部砌体结构不发生破坏或破坏较轻,同时底层也不发生过大的位移。
但该体系震后修复困难,且仅适用于框架-剪力墙结构或底层框剪砌体结构。
2.4 混凝土脊柱墙
为了提高框架结构的抗震性能,保证其薄弱层在强震作用下的安全性,文献[2]提出了一种利用混凝土脊柱墙加固已有结构的方法。
混凝土脊柱墙是在不破坏原结构墙体的前提下,采用钢筋混凝土对原结构每层中部的墙体进行加固,从而在结构整体中形成一条“脊
椎”,有效地保证结构整体和薄弱层的安全。
通过对一幢9层结构进行动力分析,分析结果表明该方法能够有效地提高结构的延性,从而改善结构整体的抗震性能。
3 减震控制技术
一些专家学者采用隔震、减震等新技术对底层柔性结构进行了一些研究。
3.1 液压质量调谐减震系统
液压质量调谐减震系统(hms)是由液压缸、导管、活塞及惯性质量等组成的一种减震装置。
它具有结构简单、造价低廉和安装方便等优点。
通过相关研究可以看出,hms系统可以有效地控制底层柔性结构柔性底层的地震反应,控制效果可达50%以上,同时上部结构的层间位移也得到了有效地控制,从而改善了底层柔性结构的整体抗震性能。
3.2 液压阻尼控制系统
液压阻尼控制系统是对液压质量调谐系统的一种改进,即取消了hms系统的惯性质量,变为液压阻尼系统(hds)。
当结构因地面运动而产生振动时,活塞及管路中的油液也随之振动,结构的一部分振动能量传给了液体,变为液体的动能及其阻尼耗能,从而减小了结构的振动。
文献[3-4]对液压阻尼控制系统进行了试验研究、时域和频域分析,分析结果表明该系统是通过改变原结构的动力特性达到控制结构地震反应的目的,由于对结构设置了附加阻尼,使结构的地震反应得到了有效地控制。
上述hms系统和hds系统均具有构造简单、造价低廉的特点,但是两者均需要一个与结构脱离的支撑体系,该支撑体系增加了建筑物的占地面积,使得结构造价增高,因此,hms和hds在实际工程中的应用受到限制。
3.3隔震技术
在底层柔性结构中应用以聚四氟乙烯为滑动材料的滑移支座[5],将其安装在底层剪力墙的顶端,当结构受到较小地面激励时,隔震体系表现出刚性特点;当地震动强度超过一定水平时,摩擦滑移层开始滑移,发挥隔震作用,这时即使地面激励再增大,传给上部结构的地震作用也不会随之增加。
经试验分析,滑移层的耗能及隔震使得原结构在地震作用下的受力状态得到改善,耗能能力提高,上部结构侧移量减小。
文献[6]提出了一种隔震柱体系来代替传统的底层框架柱,从而提高底层柔性结构的抗震性能或对既有结构进行抗震加固。
这种隔震柱体系基于摩擦摆原理,采用普通钢材,其设计方法与传统隔震结构类似。
文中通过一个实际工程计算,验证了该结构体系的可行性和有效性。
文献[7]采用钢管混凝土柱作为底层的耗能柱,用承重墙和橡胶隔震器来控制底层倒塌破坏的耗能-隔震柔性底层组合结构体系来提高底层柔性结构的抗震性能。
这种结构体系充分利用了钢管混凝土柱的良好耗能特性来吸收和耗散地震输入结构的能量,用隔震器承受一部分结构的重力荷载,避免底层变形过大造成的结构倒塌。
研究表明合理搭配底层钢管混凝土柱的刚度、橡胶隔震器的刚度与上层钢筋混凝土柱的刚度,减震效果显著,可以有效的减少结构的损伤。
3.4 摩擦型阻尼器
文献[8]采用摩擦阻尼器对美国加州的一栋底层柔性结构进行了加固分析。
该结构为两层,底层为框架薄弱层,二层为砌体结构。
文中对采用传统加固方法(加钢支撑)和采用摩擦型阻尼器的加固方法进行了对比,无论从用钢量,还是从减震效果上看,后者都明显优于前者。