第七章 运动参量的测量
计量学基础——几何量计量
标准。它是单值量具,以其两端面之间的距离复现 长度量值。常用的量块是矩形平行六面体。
量块的主要用途是常被用作计量器具的标准。高 等级的量块可用来检定低等级的量块,低等级的量 块还可以直接作为精密的量具使用。
19
第三节 几何量计量的传递和校准
一、 长度计量
如便携式光纤干涉测量仪、便携式大量程三 维测量系统等,往往用于解决现场大尺寸的测量 问题。
36
第四节 几何量计量的发展
一、 测量尺寸继续向着两个极端发展
4、测试方式向多样化发展 4)虚拟仪器
虚拟仪器是虚拟现实技术在精密测试领域的应用, 国内已有深入的研究。一种是将多种数字化的测试仪器 虚拟成一台以计算机为硬件支撑的数字式的智能化测试 仪器;另一种是研究虚拟制造中的虚拟测量,如虚拟量 块、虚拟螺纹量规、虚拟坐标测量机等。
1、量块 量块的等和级 按制造准确度分可分为0级,1级,2级,3级,4
级共5个级别; 按量块的测量准确度分可分为1等,2等,3等,4
等,5等,6等共6个等级。
20
第三节 几何量计量的传递和校准
一、 长度计量
1、量块 量块的性能
1)稳定性,即量块的实际长度随时间变化的程度。 2)耐磨性,量块在工作中经常与其他物体有接触, 所以要求计量面要有足够的耐磨性。 3)研合性,量块与量块经互相推合或贴合而形成一 体的性能。
2
第一节 几何量计量的基本名称与概念
一、 几何量的概念
几何量表征物体的大小、长短、形状和位置,其 基本参量是长度和角度,除此之外,还必须加入一些 工程参量,如:圆度、锥度、粗糙度、渐开线、螺旋 线等。
几何量计量的单位有:长度单位为“米”,单位 符号为“m”,是SI的七个基本单位之一。角度单位 有两个,即平面角单位为“弧度”,单位符号为 “rad”;立体角单位为“球面度”,单位符号为 “sr”。
运动量测量技术共65页文档

运动量测量技术
36、“不可能”这个字(法语是一个字 ),只 在愚人 的字典 中找得 到。--拿 破仑。 37、不要生气要争气,不要看破要突 破,不 要嫉妒 要欣赏 ,不要 托延要 积极, 不要心 动要行 动。 38、勤奋,机会,乐观是成功的三要 素。(注 意:传 统观念 认为勤 奋和机 会是成 功的要 素,但 是经过 统计学 和成功 人士的 分析得 出,乐 观是成 功的第 三要素 。
39、没有不老的誓言,没有不变的承 诺,踏 上旅途 ,义无 反顾。 40、对时间的价值没有没有深切认识 的人, 决不会 坚韧勤 勉。
1、最灵繁的人也看不见自己的背脊气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
海洋测绘-第7章 水深测量及水下地形测量-PPT精选文档
监控器
外部监 测和显 示系统
后处理 GPS 导航监控器
操作和检 测单元
实时数据处理工作站 数据存储
声速断面 Transceiver
数据存储 数据存储 和处理
绘图仪
罗经
声纳影像记录 姿态传感器 换能器 图2.1SimradEM950/1000多波束声纳系统组成单元 打印机
波束的发射、接收流程及其工作模式 多波束换能器基元的物理结构是压电陶瓷,其作 用在于实现声能和电能之间的相互转化。换能器也正 是利用这点实现波束的发射和接收。 多波束发射的不至一个波束,而是形成一个具有一定 扇面开角的多个波束,发射角由发射模式参数决定。
多波束波束的几何构成
波束在海底投射点位置的计算需要船位、潮位、船 姿、声速剖面、波束到达角和往返程时间等参数。计 算过程包括如下四个步骤: 姿态改正。 船体坐标系下波束投射点位置的计算。 波束投射点地理坐标的计算。 波束投射点高程的计算。
为便于波束投射点船体坐标的计算,现作如下假设: 换能器处于一个平均深度,静、动吃水仅对深度有 影响,而对平面坐标没有影响。 波束的往、返程声线重合。 对于高频发射系统,换能器航向变化影响可以忽略。
高分辨率测深侧扫声纳
高分辨率测深侧扫声纳简称为HRBSSS声纳 (High Resolution Bathymetric Sidescan Sonar)。 HRBSSS声纳分辨率高、体积小、重量轻、功耗低以 及声纳阵沿载体的长轴安装,特别适用于AUV、 HUV、ROV、拖体和船上,在离海底比较近的高度 上航行,获得高分辨率的地形地貌图。 声纳阵包括左舷和右舷两个声纳阵,自主开发的 声纳软件包括水上数字信号处理软件、水上服务器软 件、声纳驱动软件和水下主控软件,以及用于调试测 试的终端调试测试软件、终端调试测试软件和声纳仿 真软件。
第七章 测量误差基本概念1
二、测量误差定义及表达 测量误差:测量结果与被测量的真值之间的差。 即测量误差=测量结果-被测量的真值 真值:被测量的真值是指一个量在被观测瞬 间的条件下,被测的量本身所具有的真实大小, 真值是客观存在的,但在一般情况下又是未知的, 这是因为客观世界的一切物体都处于不断运动之 中,测量也不可能完全没有误差,因此也就无法 求得瞬息变化的被测的量的真值。所以量的真值 仅是一个理想的概念,在实际运用中的真值是指 以下几种情况:理论真值、约定真值。
例如,下列两组测定结果:
x1- : + 0.11 -0.72 +0.24 + 0.51 x -0.14 0.00 +0.30 -0.21 =0.28 N1=8 d1 x2- : +0.18 +0.26 -0.25 -0.37 x +0.32 -0.28 + 0.31 -0.27 N2=8
2=0.28 d
相对误差能反映出误差在真实值中所占比
例,这对于比较在各种情况下测定结果的准确
度更为方便。绝对误差和相对误差都有正负, 正值表示测定值比真实值偏高,负值表示测定 值比真实值偏低。
二、精密度与偏差
精密度是几次平行测定结果之间相互接近的 程度,它反映了测定结果再现性的好坏,其大小 决定于随机误差的大小。精密度可以用偏差、平
均偏差或相对偏差来衡量。
偏差定义为:
d
越差。
def
xi x
偏差越大,精密度就越低,测定结果的再现性就
平均偏差定义为:
N 相对平均偏差定义:
085400电子信息-仪器仪表工程
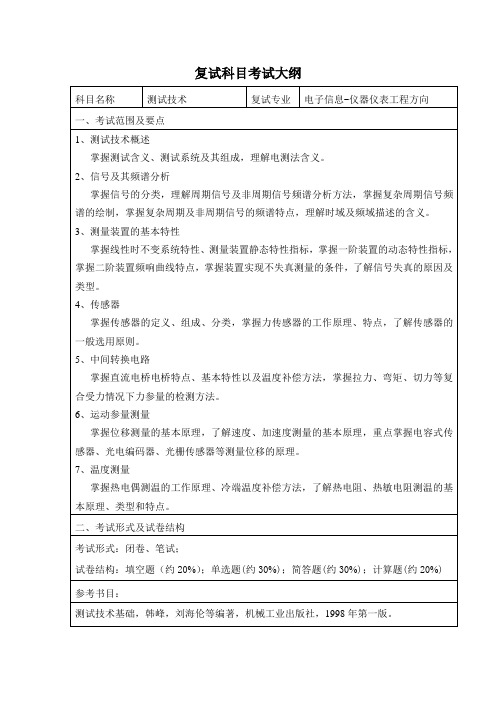
掌握位移测量的基本原理,了解速度、加速度测量的基本原理,重点掌握电容式传感器、光电编码器、光栅传感器等测量位移的原理。
7、温度测量
掌握热电偶测温的工作原理、冷端温度补偿方法,了解热电阻、热敏电阻测温的基本原理、类型和特点。
二、考试形式及试卷结构
考试形式:闭卷、笔试;
试卷结构:填空题(约20%);单选题(约30%);简答题(约30%);计算题(约20%)
参考书目:
测试技术基础,韩峰,刘海伦等编著,机械工业出版社,1998量装置静态特性指标,掌握一阶装置的动态特性指标,掌握二阶装置频响曲线特点,掌握装置实现不失真测量的条件,了解信号失真的原因及类型。
4、传感器
掌握传感器的定义、组成、分类,掌握力传感器的工作原理、特点,了解传感器的一般选用原则。
5、中间转换电路
掌握直流电桥电桥特点、基本特性以及温度补偿方法,掌握拉力、弯矩、切力等复合受力情况下力参量的检测方法。
复试科目考试大纲
科目名称
测试技术
复试专业
电子信息-仪器仪表工程方向
一、考试范围及要点
1、测试技术概述
掌握测试含义、测试系统及其组成,理解电测法含义。
2、信号及其频谱分析
掌握信号的分类,理解周期信号及非周期信号频谱分析方法,掌握复杂周期信号频谱的绘制,掌握复杂周期及非周期信号的频谱特点,理解时域及频域描述的含义。
第四章 运动参数测量
光源
x1
光通路
x2
光电器件
测量电路
对光量的调制方法: X1——被测量直接引起光源光量的变化 X2——被测量在光传播过程中调制光量 光电传感器的物理基础是光电效应。
山东大学模具工程技术研究中心 10
光电效应分两大类型:外光电效应和内光电效应
外光电效应
光照
金属 金属氧化物
内光电效应
床身1-1截面的应力分布曲线
山东大学模具工程技术研究中心
28
相似理论
结构强度与刚度的模型试验在试验研究中是常遇到的。如设计一台新型或 大型机器时,都要通过模型试验来确定其最佳方案;有时由于研究问题的 特殊性而在实际机器上无法进行直接试验也需要通过模型试验来解决。
模型试验包括模型设计、如何测量数值和怎样将测得数据推算到实物上去 等三个问题。 模型设计包括模型材料的选择,几何尺寸的决定加载方法和试验程序的安 排等。
等强度梁:
在一般测量中应使用标定方法确定应变和位移之间的数量 关系,而不直接使用上式。
山东大学模具工程技术研究中心 6
用应变片测大位移 θ角不能太小,θ角越小对楔块的导向性要求也就 越高。
山东大学模具工程技术研究中心
7
(三) 差动变压器式
组成原理:用三个绕线组和可移动铁芯组成,初级线圈1接通交流电源,因 互感效应在磁极线圈2、3产生电动势,两者反接。
4
测量电路:电桥特点: (1)结构简单
(2)速度不能太快
(3)接触电阻不稳定容易引起误差
山东大学模具工程技术研究中心
5
(二) 应变片式位移传感器
原理:用一弹性元件把位移量转换成应变量,然后用应变片、应变仪
测量运动ppt课件
目录
• 测量运动概述 • 测量运动的方法与技术 • 测量运动的误差分析 • 测量运动的实践操作 • 测量运动的案例分析 • 测量运动的未来发展与展望
01
测量运动概述
定义与分类
定义
测量运动是指通过特定的测量方 法和技术,对物体的位置、速度 、加速度等运动参数进行测量的 过程。
分类
。
间接测量
通过测量时间、速度等 参数,利用公式计算距
离。
激光测距
利用激光测距仪测量两 点间的距离,精度高、
速度快。
GPS定位
通过GPS卫星定位系统 ,测量物体在地球上的
位置。
角度测量
01
02
03
04
直尺法
使用直尺或量角器测量角度。
三角函数法
利用三角函数关系,通过已知ห้องสมุดไป่ตู้边长和角度计算其他角度。
全站仪
案例四:位移与位置测量的应用
总结词
分析位移与位置测量的方法和应用场景
详细描述
讨论位移与位置测量的基本概念和关系。介绍位移与位置测量在导航、地理信息系统等领域的应用, 如GPS定位、地图绘制等。
06
测量运动的未来发展与展 望
新技术与新方法的探索
人工智能与机器学习在测量运动中的应用
01
利用人工智能和机器学习技术,实现自动化、高精度的运动测
使用全站仪测量角度和距离, 精度高、功能强大。
电子罗盘
利用电子罗盘测量方向角,常 用于导航和定向。
速度与加速度测量
计时法
通过测量物体运动的时间和距 离,计算速度和加速度。
频闪仪
利用频闪仪记录物体运动过程 中的位置和时间,计算速度和 加速度。
第七章 力、力矩和压力的
§2 力的测量
一、力的测量方法
1、利用动力效应测力 动力效应使物体产生加速度,测定了物体的质量及 所获得的加速度大小就测定了力值。 2、利用静力效应测力 静力效应是物体产生变形,通过测量物体的变形量 或用与内部应力相对应参量的物理效应来确定力值。 如:测量变形用差动变压器、激光干涉等方法 利用与力有关的物理效应:压电效应、压磁效应等
§4 压力的测量
一、压力的量值传递系统 见表7-5 二、压力的测量方法 1、液压式测压法 如:液体式压力计 2、弹性变形测压法 如:膜盒压力计 3、负荷测压法 如:活塞式压力计 4、电学量测压法 如:将压力转换成电阻、电容、电感等。 各类型的压力表见表7-6
三、压力测量装置
1、液体式压力计 U形管式、单管式、倾斜微压计等 液体有:水银、蒸馏水、乙醇等 2、弹性式压力计 弹性元件有:弹簧管、膜盒、膜片、波纹管等 如图7-29 特点:结构简单、价格低、能适应恶劣环境; 频率响应低。
二、力的测量装置 1、压阻应变式测力仪
它由弹性体、应变片、测量电路等构成。图7-2 弹性体的工作原理如图7-3 典型柱式弹性体的结构如图7-4 改变结构的目的是提高灵敏度;获取均匀的应变 区以减少应变片端部及接线端的影响;增强抗测向负载 能力;对负荷有良好的导向作用。 除柱式外还有其它几种典型弹性体结构,如图7-5 测量电路由电桥等组成。见表7-1
第七章 力、力矩和压力的测量
§1 概述
一、力——物质之间的相互作用。 单位:牛顿(N) 动力效应:力改变物体的运动状态或使物体产生加速度 静力效应:力使物体产生变形,在材料中产生变形。 二、力矩——力和力臂的乘积。 单位:牛顿米(N•m) 转矩:使机械零部件转动的力矩。 扭矩:使……………发生扭曲变形的力矩(转矩)。
运动的描述与测量
运动的描述与测量运动是生活中不可或缺的一部分,我们常常参与各种类型的运动,如跑步、游泳、篮球等。
运动的描述与测量是了解和衡量运动活动的关键步骤。
本文将介绍运动的描述和测量的主要内容,以及一些常用的测量方法。
1. 运动的描述运动的描述是指对运动的基本信息进行详细描述。
包括运动的类型、目的、场地、规则等。
下面以跑步为例进行描述。
跑步是一种常见的有氧运动,人们通过快速地移动双脚,以身体前倾的姿势在地面上推进自己的身体。
跑步可以在室内或室外进行,跑步的目的主要包括锻炼身体、增强心肺功能、减肥和享受户外自然环境。
跑步的规则一般没有严格限制,参与者可以自由选择距离和速度。
2. 运动的测量运动的测量是指对运动过程中的一些关键指标进行测量和记录。
常用的测量参数包括时间、距离、速度、心率等。
以下是一些常见运动的测量方法。
a) 跑步距离的测量:有多种方法来测量跑步的距离。
最简单的方法是使用计步器或者计步手机应用程序来计算步数,然后根据平均步幅来估算距离。
较为精确的方法是使用GPS手表或手机应用程序来测量跑步的实际距离。
b) 跳绳时间的测量:跳绳是一种简单有效的有氧运动。
跳绳时间可以通过使用秒表或者手机上的计时功能来进行测量。
c) 心率的测量:心率是判断运动强度的一个重要指标。
可以使用心率监测器或者智能手环来实时测量心率。
一些跑步机和健身设备也可以测量心率。
d) 游泳速度的测量:游泳速度通常通过计时整个游泳过程所需要的时间来测量。
可以使用手表或计时器进行计时。
3. 运动数据记录与分析运动数据的记录和分析对于了解运动的效果和进步非常重要。
现代科技提供了各种工具来记录和分析运动数据。
以下是一些常见的运动数据记录与分析工具。
a) 运动APP:使用手机应用程序可以记录和分析跑步、游泳等运动的数据。
这些应用程序可以帮助记录跑步距离、速度、耗时等参数,并生成图表和报告。
b) 运动手表:运动手表配备了GPS和心率监测器等功能,可以准确记录跑步、骑行等运动的数据。
第七章-运动和力-PPT
36
考点聚焦
归类示例
第8课时┃归类示例
归类示例
类型一、力的合成
例 1 把一个质量是0.5 kg的篮球竖直向上抛出,假定运
动过程中空气对它的阻力恒为0.5 N,则篮球在竖直上升和降落
过程中所受力的合力分别是(g取10 N/kg)( B )
A.5.5 N,5 N
B.5.5 N,4.5 N
C.4.5 N,5.5 N
考点聚焦
归类示例
图7-4
21
第7课时┃归类示例
解析
(1)弹簧测力计只能在弹性限度内使用,弹簧的伸长量
与所受拉力成正比。(2)甲、乙在受力相同时,甲的伸长量大,所以
用甲制作的测力计较精确,而乙伸长量小,即可以在弹性限度内加更
大的力,所以用乙制作的测力计量程大。(3)在探究伸长量和弹簧原
长的关系时,注意控制变量法的应用。
几个力__平__衡____,这时物体处于平衡状态。
31
考点聚焦
归类示例
第8课时┃考点聚焦
2.二力平衡
匀速直线运动 同一
同一直线
相等
静止状态 相反
[注意] 物体处于平衡状态可能是受到平衡力的作用,也可能
是因为没有受到力的作用。
32
考点聚焦
归类示例
第8课时┃考点聚焦 考点3 惯性
33
考点聚焦
归类示例
的伸长量才跟它受到的拉力成正比,如果超出弹性限度,它
就要损坏。
(2)弹簧的伸长量不是弹簧的长度。图 7-1 甲中弹簧不受力的作用(不计自身重力),弹
簧原长为 L0,图乙是受到力的作用时的情 景,弹簧的现长为 L1,L0 和 L1 是在不同情
况下的弹簧的长度,ΔL 则为弹簧的伸长