导航板方案
导视牌安装施工方案
导视牌安装施工方案1. 引言导视牌是指用来引导和指示人们在建筑物内部或公共场所内找到目的地的标识牌,它对于提升用户体验、增强空间感知和方便大众导航非常重要。
导视牌安装施工方案就是指在建筑物内部或公共场所内安装导视牌的方案。
2. 施工前准备在进行导视牌安装施工之前,需要做一些准备工作,确保施工顺利进行。
2.1 环境评估首先需要对施工环境进行评估,包括确定导视牌安装位置、导视牌的设计和要传递的信息等。
还需要注意避免安装位置影响建筑物的结构和功能,确保安全和方便性。
2.2 材料准备根据导视牌的设计需求,准备相应的材料和工具,例如导视牌底座、导视牌面板、螺丝、电动螺丝刀等。
材料的选择应符合相关标准和规范,保证施工质量。
2.3 人员组织为了确保施工效率和质量,需要合理组织施工人员,确保每个环节都由专业人员负责。
3. 施工步骤导视牌安装施工主要包括位置确定、底座安装、面板安装和信息制作等步骤。
3.1 位置确定根据环境评估的结果,确定导视牌的安装位置。
位置的选择应考虑使用者的需求和方便性,并与建筑物的结构和功能相协调。
3.2 底座安装根据导视牌设计的要求,安装导视牌底座。
首先,使用电动螺丝刀在导视牌安装位置预先打好螺丝孔。
然后,将导视牌底座与建筑物固定,确保安装牢固。
3.3 面板安装根据导视牌设计的要求,安装导视牌面板。
将导视牌面板与导视牌底座连接,使用螺丝固定。
确保面板的安装平整牢固。
3.4 信息制作根据导视牌的功能和设计需求,制作并安装相应的信息内容。
信息内容应简明清晰,易于理解和识别。
可以采用喷绘、贴纸等方式制作信息内容,确保耐用性。
4. 安装质量控制为了确保导视牌安装的质量,需要进行相应的检测和控制。
4.1 安装位置检查在安装完成后,对导视牌的安装位置进行检查,确保位置精确、符合设计要求。
4.2 安装固定度检查对导视牌的底座和面板进行固定度检查,确保安装牢固、稳定。
4.3 信息内容检查对导视牌的信息内容进行检查,确保文字或图案清晰可辨,没有错误或遗漏。
单位网站 方案

单位网站方案一、方案背景随着互联网的发展和普及,越来越多的单位意识到拥有一套完善的单位网站对于提升企业形象、拓展市场、与客户交流等方面具有重要意义。
单位网站不仅可以有效地向外界展示单位的信息,还可以提供各种在线服务,方便用户获取需求。
本文将提出一套完善的单位网站方案,旨在帮助单位更好地建立和运营自己的网站。
二、方案内容1. 网站设计单位网站的设计是吸引用户的重要因素之一。
设计应该简洁、大方,布局合理,页面美观。
以下是建议的设计方案:•Logo和品牌色彩:根据单位的特点和定位,设计一个专属的Logo,并确定品牌色彩,以形成统一的视觉形象。
•导航栏设计:将网站内容按照主题分门别类,设计易于导航的顶部导航栏,方便用户快速定位所需信息。
•布局设计:结合各类内容,合理安排页面布局,并考虑页面的易用性和可访问性。
可以采用响应式设计,适配不同的终端设备。
2. 网站内容单位网站的内容对于用户获取信息至关重要。
以下是建议的网站内容方案:•单位简介:清晰地介绍单位的发展历程、规模、业务范围等基本信息,让用户对单位有一个整体的了解。
•产品或服务介绍:详细介绍单位提供的产品或服务,可以包括产品描述、特点、技术参数、价格等相关信息。
•新闻动态:及时发布单位的最新动态、新闻、活动等,让用户了解单位的最新情况。
•联系方式:提供联系方式,方便用户咨询合作事宜或提供反馈意见。
3. 网站功能单位网站的功能对于用户的便利性和互动性至关重要。
以下是建议的网站功能方案:•搜索功能:提供搜索框,方便用户快速查找相关信息。
•在线留言板:为用户提供一个留言的平台,方便用户反馈意见、提出问题或与单位进行互动。
•在线客服:通过在线聊天工具或留言系统,为用户提供在线咨询与解答服务。
•在线预约:为用户提供在线预约服务,方便用户预定产品或服务。
三、方案优势本单位网站方案的优势主要体现在以下几个方面:•塑造形象:通过网站设计和内容的精心策划,凸显单位的专业性、信誉度和可靠性,提升企业形象。
自动导引车AGV的种类及导航方案分析

DOI:10.19551/ki.issn1672-9129.2021.01.065自动导引车AGV 的种类及导航方案分析廖雯涓(广州市西克传感器有限公司㊀广东㊀510623)摘要:自动导引车近几年的应用日渐广泛,无论是在高度自动化的汽车行业还是原来主要依靠人力的物流行业都能见到AGV 的身影㊂本文主要针对AGV 的车型种类,导航方式以及安全方案进行简单地分析与介绍㊂关键词:导引车;AGV ;导航方案中图分类号:TP23;TP212.13㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-9129(2021)01-0066-02㊀㊀1㊀自动导引车的背景介绍自动导引运输车 AGV (Automated Guided Vehicle)是可根据预先规划的路径行走,可自主完成搬运任务的自动运输车㊂早在20世纪50年代第一台AGV 就已经诞生,由一辆牵引式拖拉机改造而成,并且带有车兜,可沿着仓库空中固定的运输线完成搬运的工作㊂后来因其是可充电的且无人驾驶的小车,并且可根据编程以及定位情况对路线进行改变以及扩展,被美国物料研究所定义为AGV㊂20世纪70年代,AGV 的导引技术是靠感应埋在地下的导线产生的电磁频率,其通过打开或关闭导线中的频率,可引导AGV 沿着预设的路径行驶㊂随着科技的发展,在20世纪80年代末,无线试导引技术被引入到AGV 系统中,通过激光和惯性导航大大提高了AGV 系统的灵活性和准确性,这使AGV 具有了更多样化的导引方式㊂从20世纪80年代末到现今,AGV 已成为生产物流系统中最大的专业分支之一,随着产业的发展,将会成为物流㊁智能生产中不可或缺的重要组成部分㊂1.1AGV㊂自动导引车的技术为全自动AGV 技术,优点在于几乎不需要人工干预,可独立完成某项搬运装卸工作,并且因实际的搬运任务有所不同,因此车型的种类也有着诸多不同的类型㊂另外导航的方式,路径规划复杂多变,可应用在几乎所有的搬运场合㊂1.2RGV㊂RGV 为有轨制导车辆(Rail Guided Vehicle)的英文缩写,与AGV 相比,RGV 其中的一大特点为导航方式的不同,RGV 主要应用在立体自动化仓库,可沿着预先铺设好的轨道移动㊂其优点在于可灵活穿梭于各种类高密度的立体仓库中,在灵活进行各种操作的同时,大大提高了仓库的整体存储量㊂1.3AGC㊂AGC 为简易型的AGV 技术,其全称为Auto-mated Guided Cart,这类的车型与AGV 相比更注重在路径以及流程的规划上,因AGC 通常只用来进行搬运的操作而不会刻意强调小车自身的自动装卸功能,在导航方面多会采用门槛较低的磁带导航方式㊂此外,一般的AGC 生产企业为了能更好的控制成本,更加倾向于选用简单的功能器件㊂1.4协作机器人㊂协作机器人原为可与人类在同一空间近距离互动工作的机器人,因大部分工业类机器人的设定都是在固定有限的区域内进行作业,不需要考虑与人类进行近距离互动,而对于写作机器人来说,在协作的同时确保与人类的配合以及保护人员安全也是协作机器人需要考虑的机能㊂现如今在AGV 导引车上搭载协作机器人也是一个较新的领域,其优点在于通过AGV 的移动,协作机器人可移动到不同的工作地点进行操作,而上方搭载的协作机器人在自动进行工作的同时也能更好地配合人类协同作业㊂2㊀自动导引车的车型介绍不同的自动导引车具有不同的功能,如搬运物料,服务上菜 按照功能划分,目前大部分AGV 可分为以下7类:潜伏式,背负式,叉车式,牵引式,重载式,服务类,特种类㊂2.1潜伏式AGV㊂潜伏式AGV 通常可自由穿梭在厂区的料架下方,并通过车身上的顶杆将料架勾起,并通过AGV 的移动可将料架搬运到指定位置㊂其车身高度普遍较低,因为需要在有限的高度,空间及缝隙中自由穿梭㊂另外潜伏式AGV 在空载时通过选择最近的路径返回,可有效地提升周转效率㊂2.2背负式AGV㊂背负式AGV 与潜伏式AGV 的区别在于,需要搬运的料架㊁托盘㊁料箱等货物可直接放置在车体上进行搬运㊂因此这类的车型也需要更加注意在行驶过程中对障碍物的探测,紧急制动以及防滑缓冲等㊂2.3重载式AGV㊂重载AGV 与背负式AGV 十分类似,但因其搬运的物品重量通常超过10吨,这也代表着AGV 的技术达到国际标准㊂这类的AGV 多应用与仓储㊁港口㊁制造㊁机场等场所㊂随着自动化物流水平提高,重载AGV 在有效地降低人员劳动强度的同时,可提高搬运效率缩短物流周期㊂2.4牵引式AGV㊂牵引式AGV 与潜伏式AGV 有着异曲同工之妙,其共同点在于车体本身无需承载货物的重量,而是通过引导牵引的方式将实现搬运物品的操作㊂牵引式AGV 利用车体尾端牵引棒的自动升降,可挂接或脱离料车,在通道中进行往返搬运的运动,用途广泛㊂㊃66㊃2.5叉车式AGV㊂叉车式AGV与先前的4类车型有着较大的不同点,前4类AGV更倾向于AGC可实现将货物进行点对点搬运的较为简易的操作㊂而叉车式AGV除了对物品进行搬运,还需对物品进行定位㊂叉车式AGV可运用于各种复杂路径中,货叉的举升高度可灵活且精确的定位,并实现对托盘的抓取㊂2.6服务类AGV㊂先前提到的5类AGV主要应用在工业生产环境,而服务类AGV则更贴近日常㊂这类的AGV多以服务人类或配合人员进行简单服务为主㊂例如上菜机器人,通过上方的视觉导航可识别天花板的地标,从而定位目标位置,当到达固定位置后由服务人员配合上菜,优点在繁忙时段可提高上菜效率㊂另外,服务类机器人在酒店中的应用也十分广泛,它可自动上下电梯并到达指定房间完成配送任务,大大提升了配送效率㊂3㊀自动导引车的导航方案关于自动导引车的导航方式无疑使AGV最核心的技术之一,通过采集AGV自身的数据和周围的环境可对车体自身定位以及进行路径规划㊂根据不同的应用,AGV的导航种类也十分不同㊂现今主要的导航方式可大致分为两种,一种为有轨导航,另一种为无轨导航㊂第一种有轨导航也可称为路径规划导航,这类的导航方式以磁条导航,荧光导航居多,车体可沿着在地面上预先铺设好的道路行驶,优点在于对导航算法的开发难度较低,缺点主要体现在需要预先铺设磁条,并且在后期需要持续的对路径进行维护㊂第二种无轨导航的种类较为丰富,基于不同的原理如轮廓导航㊁反光板导航㊁二维码导航㊁视觉导航㊁等等㊂这类导航方式在软件开发难度较大,但是灵活性更高,在实际应用场景中,无需对厂区进行路径规划,车体即可自由行驶,同时如行驶中遇到障碍物遮挡,亦可重新规划较近的路径完成搬运任务㊂3.1路径规划导航㊂路径规划导航的种类有很多,电磁导航㊁色带导航㊁惯性导航㊁磁导航 在诸多导航方式中,目前使用较多的为磁导航,因其操作难度相对较低,所以在中低端市场应用较广㊂潜伏式的AGC和进行简单搬运工作的AGV使用路径规划的导航方式较多,因其行驶路径较为固定,使用这种导航方式可节省导航算法的开发成本㊂但是在后期对路径的维护上则需多加注意,以磁导航举例,因磁条本身的承重能力有限,当有重物碾压时容易发生磨损㊁断裂等情况,因此需要适时进行维护㊂而目前的另一种路径规划导航方式荧光导航则可在一定程度上降低后期对路径的维护成本㊂因荧光导航的色带一般为较薄耐磨的材料,且因荧光涂料需要在紫光灯的照射下才有效㊂另外,磁导航的磁带因有厚度一般需要开槽进行镶嵌,而色带较薄可直接铺设在厂房内,更便于铺设和维护㊂3.2视觉导航㊂视觉导航属于无轨导航的一种,也是目前发展速度较快且较为成熟的一种导航方式㊂在AGV移动的过程中,通过安装在车体底部或者顶部的相机可快速读取标记,如:二维码㊂再确认车体当前位置的同时也可对下一次需要移动的位置做出判断㊂视觉导航无需人为铺设物理路径,因此更符合柔性化导航㊂其中二维码导航在视觉导航中则是运用相当广泛的其中一种导航方式,在无人仓库中将物品进行搬运及分类便是使用二维码导航方式,结合定位于导航一体㊂3.3激光导航㊂激光导航方式是目前工控类AGV使用最广泛的导航方式,因其能自主定位导航,智能信息交互,并且能实时更新当前地图,当遇到障碍物是能自主避障㊂在本章节中主要介绍基于轮廓参考的SLAM(Simultaneous Locali-zation and Mapping)同步定位与地图构建导航方式,以及基于反光板的激光高精度定位导航方式㊂(1)激光轮廓导航㊂基于环境轮廓的激光导航是目前业界主流的导航方案之一,通过扫描车体周围的环境轮廓,机器人可实时定位以及建立地图,从而完成自动导航的功能㊂其导航方式主要分为以下三步㊂第一步,自主建图㊂当AGV在厂区内行驶时,通过外部传感器(如:激光扫描仪)与内部传感器(如:编码器)获取的数据可进行电子地图的构建㊂第二步,路径规划㊂在电子地图中可设定起点以及终点,AGV根据既定的目标地点自主规划路径㊂最后一步为自主导航以及避障㊂AGV在行驶的过程中实时与存储的电子地图数据进行对比,从而计算出AGV的实时位置以及姿态,从而实现自主导航,同时通过外部传感器,在行驶路径上当遇到障碍物时,可实时避障㊂(2)基于反光板的激光导航㊂基于反光板的激光导航方式,通过在厂区内的墙面或料架上布设反光板,可准确定位AGV的绝对坐标以及角度㊂红线为激光扫描仪的激光束,AGV在行驶的过程中,可通过扫描布设在墙面的反光板可获取到当前AGV与发光板的距离㊁角度以及反射率的数据,从而进行精确的定位㊂配合预设的电子地图,AGV在行驶过程中可实时对自身进行定位,实现自主导航㊂4㊀自动导引车的相关认证自动导引车近几年在国内的发展速度较快,并且AGV 的出口项目数量也在逐步提升,而当涉及到出口时AGV都需要根据当地的规定完成相关的认证,如欧盟的CE认证,再比如国内目前针对AGV及机器人的CR认证㊂这些认证主要对AGV的安全防护上提出了部分要求,因为当自动导引车在行驶过程中会遇到与人员交互的场景,而这类认证主要也是为了保证人员安全㊂目前关于AGV的行业标准有很多,如国内目前的自动导引车(AGV)设计通则,EN1525-AGV行业安全标准(C-类指令)等等在这些标准中详细的描述了自动导引车在速度控制㊁控制系统㊁急停控制㊁人员检测等多方面需要满足的安全等级㊂5㊀总结本文旨在向读者全面介绍AGV的情况,在具体应用场景中,还需根据实际情况做相应的调整㊂现今AGV行业蓬勃发展,随着AGV的自动化程度提高,未来AGV与机器人技术进行结合,可有效提高整体生产效率以及工业自动化,助力中国制造2025及工业4.0㊂参考文献:[1]自动导航车(AGV)发展综述/ KXReader/Detail?TIMESTAMP= 637159870784080000&DBCODE=CJFQ&TABLEName= CJFD2010&FileName=JXZZ201001016&RESULT=1&SIGN= cM5YOEmR5W0sKMobLOFx5t8fFeU%3d作者简介:廖雯涓,广州市西克传感器有限公司㊂㊃76㊃。
占路交通疏导组织方案模板

占路交通疏导组织方案模板一、问题现状分析现在的城市越来越拥堵,尤其是高峰期,路上车流密集,尤其在一些施工或者临时占路的情况下,堵车现象就更严重了。
说到这个,你是不是也常常在路上傻傻地等待,眼看前面的车一辆接一辆地挪动,而自己却怎么也动不了。
那种焦急的心情,想必大家都有过。
对,没错,正是这种“等得花儿都谢了”的情境,正是因为路面出现了各种占道施工、车辆违停等问题,导致了交通的滞缓。
比如说,路面突然出现的道路封闭、施工区域,真是让人无从下手,指望着信号灯和交警的帮助,却感觉问题解决的速度慢得像老牛拉破车。
我们要分析一下,这种情况究竟给市民带来了多大的困扰——不仅上班迟到,吃饭时间也泡汤,路上耽误的时间,简直比给自己找麻烦还要麻烦。
你说,这堵车简直是把“时间都给榨干了”。
二、占路疏导的必要性所以呢,咱们得想个办法解决这个问题。
总不能让大家都在路上憋成“路怒症”患者吧。
交通疏导,这事儿不能拖,得尽早处理。
这不仅关乎到路面的通行效率,最重要的是关乎到每个人的日常生活。
早上匆匆忙忙去上班,突然得绕大圈去,绕得你眼睛都花了,还得一路心慌,生怕迟到。
那种感受,真的是又心累又头疼。
你说,要是能提前预判出这些占路的情况,合理规划出路面通行路线,问题也就迎刃而解了。
疏导的工作得从根本上解决掉这类路面突发占道的麻烦,而不单单是等到大家快撞到一起了才去想办法,那就晚了。
就好像你发现水管漏水了,得赶紧修,要不然水漫金山,后悔都来不及。
三、交通疏导的具体方案要想有效疏导交通,首先得制定一套合理的交通疏导方案。
这就像是打仗之前的谋划,得心中有数,才能不慌不忙。
第一步,得提前预测和摸清道路占路的情况。
像是施工计划、道路封闭、临时交通管制啥的,提前告知大家一声。
这样,大家就能心里有数,提前安排路线。
你看,就像咱们平常出门开车,导航一开始告诉你前方有施工,绕行或者注意减速,这样开起来心里才不会慌。
第二步,合理设置疏导路线,最好根据实时路况来进行动态调整。
美赛达产品规格说明书.doc

美赛达科技-专业GPS方案提供商规格说明书872F-MSDREV: 002编制:许赖玉标准化:宁双林审核:批准:修改记录目录1 应用范围 (4)2 产品描述 (4)3 产品详细规格及性能参数 (5)4 接口说明(PIN Description) (7)5 对导航软件的要求 (10)1应用范围本规格说明书适用于美赛达内置车载导航板872F-MSD。
本说明规定了美赛达内置车载导航板872F-MSD的规格及性能说明。
2产品描述通过内置存储Flash装入电子地图导航软件实现GPS卫星定位导航功能;三星S3C2451XH-40/53芯片方案,ARM926EJ核心,400MHz/533MHz主频;系统内存为128MB DDRII SDRAM;Flash支持SLC/MLC,初定为三星128MB SLC NAND FLASH;接口齐全,外围电路简单,与车载DVD完美结合,功能扩展潜力巨大;支持多种视频输出格式和分辨率,可输出RGB,S-VIDIO(即Y/C),CVBS及YPbPr视频,双声道CD立体音质输出,可直接与汽车DVD的AV(AUDIO AND VIDIO)端连接;RGB输出,分辨率为320×240、480×234、400×234、640×480和800×480等;CVBS,Y/C,YPbPr输出支持多种分辨率:320×240、480×234、400×234、640×480和800×480等;CVBS,Y/C,YPbPr输出模式是可选择PAL或NTSC输出,可在界面上调节亮度,对比度,色度,饱和度;视频输出模式以及触摸接口方式改动无需改动硬件;超强的自适应性:可在屏幕上直接调节显示大小及显示位置,在匹配不同厂家的屏或不同的地图时更显优势;内置SiRF STAR III GPS接收模块和内置SMA天线接口,采用2.0间距的32pin兼容接口实现与汽车DVD通讯,并支持0.5mm间距的12PIN FPC SD卡接接口支持双声道line out,支持声音输出有效信号控制;支持导航声音优先功能,即客户在观看DVD时如有导航提示,则自动播放导航语音; 可直接支持四线电阻式触摸,红外遥控操作,通过串口接口可完成触摸屏、按键、红外的操作;支持灵活的触摸屏操作,可方便与车载DVD整合共用一个触摸屏,可以通过硬件切换的方式(继电器或模拟开关)或者软件协议的方式(串口)实现触摸屏共用;支持MP3/MP4播放功能,支持图片浏览功能,支持文本文件阅读功能;支持USB host1.1信号兼容USB Device2.0;支持电子狗功能扩展或者TMC功能二选一;支持蓝牙、可以通过12pin FPC座接口跟蓝牙通讯;支持CMMB数字电视功能;CMMB数字电视CA采用SMD方式。
auv控制方案

9.1导航控制系统方案导航控制系统完成模拟器航行体的自游式发射控制,控制电机驱动器,对模拟器的水下速度进行控制、深度控制和航向控制,工作完毕后控制模拟器上浮,用于水面上的回收控制以及意外情形下的紧急上浮控制。
该系统具有遥控与自主控制功能,利用惯性导航系统实现组合导航与航位推算;可对舱内状态进行监测;可记录模拟器的位置、姿态、速度等数据信息;应急上浮功能;意外下沉时,系统自动发送声示位等待救援功能。
该模拟器导航控制系统的组成:包括船载控制终端和水下控制两部分,如图9.1.1所示。
其中,船载控制终端安装有433MHz遥控模块和综合显控软件,通过预编程的模式对模拟器的运动轨迹进行预设并下载到水下控制板,使模拟器按照预定轨迹行驶;水下控制板接收船载控制终端的控制指令,实现指令的解码和分发,其中推进指令通过串口发送到驱动功率放大板来控制推进电机;转舵指令通过送到舵机控制板继而控制水平舵和垂直舵的转动到预定的位置。
为防止意外下沉,船载控制终端装有USBL船载控制模块,与控制箱相连,水下航行体安装有USBL水下端,用于对模拟器航行体的水下位置的显示;安装深度传感器,测量并计算一定深度水体的深度值,通过控制算法进行定深控制。
按照功能模块化设计和有利于各类传感器进行数据测量与通信的原则,设计各个功能模块。
控制系统分为控制硬件设计和控制软件设计两部分;在模拟器机械结构设计的基础上,设计导航控制系统的硬件布局,以满足模拟器安装空间和内部结构布局的要求。
导航与控制系统的控制目标:实现模拟器位姿实时控制,包括长时间水下导航、深度和航行控制和回收。
图9.1.1 导航控制部分结构图9.1.1 控制系统采用PC104主控制+推进电机控制板+电机驱动模块+直流电机的模式。
通过电机控制板产生PWM(脉宽调制)信号,驱动电机驱动板,实现对电机的连续调速。
按照功能模块化设计和有利于各类传感器进行数据测量与通信的原则,设计各个功能模块。
汽车无盘DVD、GPS、RADIO产品简介

备注
Play 5s of each available frequency
100KHz/9KHz 3page,total 12 3page,total 12 直接调台 AUTO
通过天线电缆信号线,输出给信号放大器
HuaHong Automotive Co,LTD
4.2 USB/SD功能
序号
功能
1 Player/Pause
EC21A1520401
TDA7419
WM9715
3.3V
M16C30P
5V
TEF6606
TB2939HQ
FLC-BTMDC732
LEA-5S 瑞图/凯立德/灵图等
HuaHong Automotive Co,LTD
1.1 定义
电话免提系统是专为行车安全和舒适性而设计的。其功能主要是:自动辨识移动电话,不 需要电缆或电话托架便可与手机联机;使用者不需要触碰手机(双手保持在方向盘上)便可控 制手机,用语音指令控制接听或拨打电话。使用者可以通过车上的音响或蓝牙无线耳麦进行通 话。
HuaHong Automotive Co,LTD
二、效果图
2.1导航界面 2.2收音界面 2.3 SD视频播放界面 2.4 USB视频播放界面 2.5 板卡图
HuaHong Automotive Co,LTD
2.1导航界面
HuaHong Automotive Co,LTD
2.2 收音界面
HuaHong Automotive Co,LTD
7 Tele-Mute 8 Beep 9 AUXIN 10 触摸功能 11 外接照明控制 12 倒车后视系统 13 RCA
备注
(MOST FET) Treble, Bass, Fader, Balance, DSP, 初始音量 中国,英国,美国,日本,韩国 对比度,亮度,显示模式,外观 中文/英文 12/24小时
基于北斗导航定位的车辆监管服务方案
基于北斗导航定位的车辆监管服务建设方案一、建设目标建设面向北斗高精定位的位置监控算力服务平台;利用北斗高精定位芯片车载终端提供的亚米级实时位置数据,结合高精度地图对车辆进行实时精准定位服务,为管理者提供车辆车道级轨迹复现、车辆行为监测及统计分析服务。
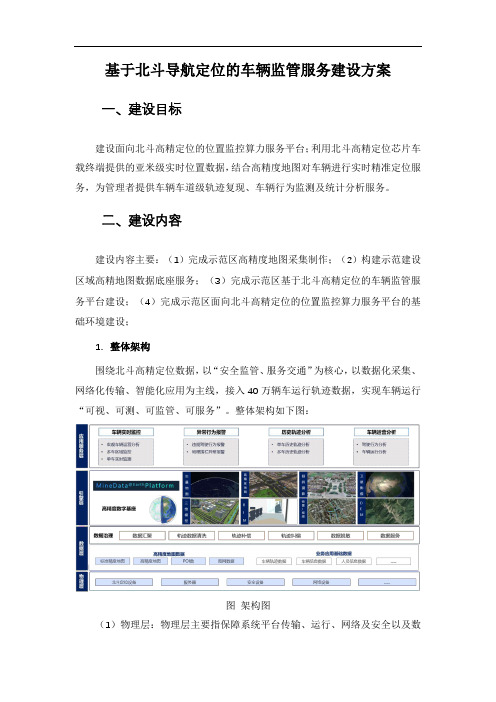
二、建设内容建设内容主要:(1)完成示范区高精度地图采集制作;(2)构建示范建设区域高精地图数据底座服务;(3)完成示范区基于北斗高精定位的车辆监管服务平台建设;(4)完成示范区面向北斗高精定位的位置监控算力服务平台的基础环境建设;1.整体架构围绕北斗高精定位数据,以“安全监管、服务交通”为核心,以数据化采集、网络化传输、智能化应用为主线,接入40万辆车运行轨迹数据,实现车辆运行“可视、可测、可监管、可服务”。
整体架构如下图:图架构图(1)物理层:物理层主要指保障系统平台传输、运行、网络及安全以及数据采集等方面的物理设备及环境。
(2)数据层:基于统一的标准规范,汇聚高精地图数据、标精地图数据、轨迹大数据,以及车辆、驾驶员相关有价值业务数据,进行坐标转换、数据融合、数据治理和格式转换以及数据存储等;(3) 引擎层:以支撑车辆监管服务场景为目标,提供丰富、实用、可扩展的时空计算、可视化、数据治理等一系列引擎工具;提供开放平台,高精度数字底图对外提供服务接口,构建高速公路高精度数字底图对外开放服务能力,实现高精度数字底图统一服务、统一开发、统一管理和统一运营支撑能力。
(4) 应用服务层:基于北斗高精定位数据进行车辆监管服务需求,提供车辆实时监控、异常行为报警、历史轨迹分析及车辆运营分析等应用服务。
2.高精度地图数据底座服务2.1数据服务(1)高精度地图针对本项目提供高精度地图服务,作为基于北斗定位的车辆监管服务平台的基础支撑,为车辆运行可视化监管监测提供高精度地图服务。
1)点云数据采集要求➢坐标:提供WGS84 坐标系数据或UTM 投影坐标系数据;➢范围:点云覆盖范围不能缺失,完全覆盖项目区域;➢时效:点云数据时效不超过项目确认一周,如果项目确认后,现场➢发生施工或其他导致现场情况变化的,需要现场变更后实施扫描或重新采集;➢轨迹:提供点云采集轨迹及相应工程对应范围矢量数据;➢精度:点云绝对精度≤ 50cm,相对精度≤20cm;➢密度:点云数据均匀分布➢强度:点云扫描物体反射强度清晰、明暗度准确反映要素形态、层次;➢厚度:拼接融合后点云厚度不超过1 厘米;➢噪点:提供点云为去噪后数据,不能存在过多噪点;2)采集内容采集内容包括路网(道路、路段、路口、车道中心线、道路中心线、渠化、隧道、桥梁、匝道、路面文字等)、交通标志(警告标志、禁令标志、指示标志、辅助标志等)、交通标线、交通设施、交通设备(电警、卡口、雷达、信号机、诱导屏等),至少包括40余类内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导航板方案
引言
导航板是一种用于辅助航行和定位的设备,广泛应用于船舶、飞机、汽车等交
通工具中。本文将介绍导航板的基本原理、常见的设计方案和应用场景。
基本原理
导航板的基本原理是通过接收和处理来自卫星或其他导航系统的信号,计算出
当前位置、速度和方向等相关信息。主要的导航系统包括全球定位系统(GPS)、
全球导航卫星系统(GNSS)和惯性导航系统(INS)等。
GPS
GPS是由美国国防部发起并维护的卫星导航系统,主要由一系列卫星和地面控
制站组成。导航板通过接收来自GPS卫星的信号,利用三角定位原理计算出接收
器与卫星的距离,并根据多个卫星的距离信息计算出接收器的位置。GPS提供的位
置信息具有很高的精度和可靠性,广泛应用于交通工具的导航和定位领域。
GNSS
GNSS是全球导航卫星系统的统称,包括GPS、欧洲伽利略卫星导航系统
(Galileo)、中国北斗卫星导航系统(Beidou)等。GNSS系统使用一组卫星和地
面控制站,通过接收和处理卫星信号,计算出接收器的位置、速度和方向等信息,
实现导航和定位功能。与GPS相比,GNSS系统具有更多的卫星资源,可以提供更
高的定位精度和更强的抗干扰能力。
INS
惯性导航系统(INS)是一种利用陀螺仪和加速度计等惯性传感器测量和计算
位置、速度和方向的导航技术。INS系统通过测量物体在空间中的加速度、角速度
和角加速度等参数,结合姿态解算和运动分析算法,计算出物体的位置和方向。
INS系统具有独立于外部信号的优势,可以在信号不可用或受干扰的环境下提供可
靠的导航解决方案。
设计方案
导航板的设计方案可以根据具体的应用场景和要求进行选择和优化。下面介绍
几种常见的设计方案。
单模式导航板
单模式导航板指的是仅使用一种导航系统进行位置计算和导航的设计方案。例
如,使用GPS系统作为唯一的导航系统进行定位和导航。单模式导航板的优点是
结构简单、成本低廉,适用于对定位精度和抗干扰能力要求不高的场景。
多模式导航板
多模式导航板采用多种导航系统进行位置计算和导航,以提供更高的定位精度
和更强的抗干扰能力。例如,同时使用GPS和INS系统进行定位和导航,通过融
合两个系统的输出结果来获得更准确的位置信息。多模式导航板的优点是精度高、
可靠性强,适用于对导航精度和可靠性要求较高的场景。
增强型导航板
增强型导航板是在传统导航板的基础上,增加了一些辅助功能和传感器,提供
更全面的导航和定位解决方案。例如,增加了气压计、磁力计和光学传感器等,可
以实现高度、方向和环境感知等功能。增强型导航板适用于对导航功能需求较高的
专业应用场景,如无人机、物流车辆等。
应用场景
导航板在交通工具、物流、航空航天等领域都有广泛的应用。下面列举几个典
型的应用场景。
船舶导航
导航板在船舶上用于辅助航行和定位。通过接收和处理GNSS信号,船舶可以
实时获得自身的位置、速度和航向等信息,提供导航和操纵的依据。导航板还可以
与雷达、自动驾驶系统等其他设备进行联动,实现自动导航和避碰功能。
飞行器导航
导航板在飞行器(如无人机、飞行器等)上起到关键的导航和定位作用。通过
接收和处理GNSS信号以及惯性传感器的输出,飞行器可以实时获得自身的位置、
高度、速度和姿态等信息,实现自动驾驶、航线规划和精确着陆等功能。
汽车导航
导航板在汽车上用于车载导航和定位。通过接收和处理GPS信号,导航板可以
提供车辆的当前位置、行驶速度和导航指引等信息。汽车导航系统还可以与地图数
据、实时交通信息等进行融合,提供最佳的行车路线和导航服务。
结论
导航板是现代交通工具中不可或缺的关键组件,通过接收和处理卫星信号和传
感器输出,实现高精度、可靠的导航和定位功能。设计方案可以根据具体的应用场
景和要求进行选择和优化,包括单模式导航板、多模式导航板和增强型导航板。导
航板在船舶、飞行器、汽车等领域都有广泛的应用,为交通运输和航空航天领域的
发展做出了重要贡献。