控制输入约束下非线性系统输出反馈容错控制
状态反馈控制的主要特性及发展1
武汉理工大学研究生课程论文课程名称:现代控制工程学生姓名:宋*课程教师:谭耀刚学号:************日期:2010年1月状态反馈控制的主要特性及发展姓名:宋雄班级:机电1004班学号:104972101293 摘要:状态反馈是指系统的状态变量通过比例环节传送到输入端去的反馈方式。
状态反馈是体现现代控制理论特色的一种控制方式。
状态变量能够全面地反映系统的内部特性,因此状态反馈比传统的输出反馈能更有效地改善系统的性能。
但是状态变量往往不能从系统外部直接测量得到,这就使得状态反馈的技术实现往往比输出反馈复杂。
本文首先介绍了状态反馈控制系统的主要特性——可控性和可观性,并且对这两种性能进行了举例说明;还介绍了引入状态反馈对系统的可控性和可观性的影响;另外也说明了如何利用状态反馈来任意配置极点。
其次,本文主要介绍的是状态反馈控制的发展,有容错控制,带全维状态观测器的状态反馈系统,这两种都是对可控性和可观性的深入的发掘和拓展。
关键词:状态反馈可控性和可观性极点配置全维状态观测器容错控制引言随着科技的不断发展,在硬件方面的发展逐步走向饱和,或者很难得到进步和延伸。
但是软件方面的发展却逐步地得到社会的重视。
一套好的设备,唯有配备合适的软件才能将它的功效尽可能大的释放出来。
对于机械方面而言,软件就是指其控制系统。
系统的状态变量通过比例环节传送到输入端去的反馈方式。
状态反馈是体现现代控制理论特色的一种控制方式。
状态变量能够全面地反映系统的内部特性,因此状态反馈比传统的输出反馈能更有效地改善系统的性能。
但是状态变量往往不能从系统外部直接测量得到,这就使得状态反馈的技术实现往往比输出反馈复杂。
状态反馈也不影响系统的能控性,但可能改变系统的能观测性。
只要原系统是能控的,则一定可以通过适当选取反馈增益矩阵K用状态反馈来任意移置闭环系统的极点(见极点配置)。
对于传统的输出反馈,如果不引入附加的补偿装置,这一点不是总能作到的。
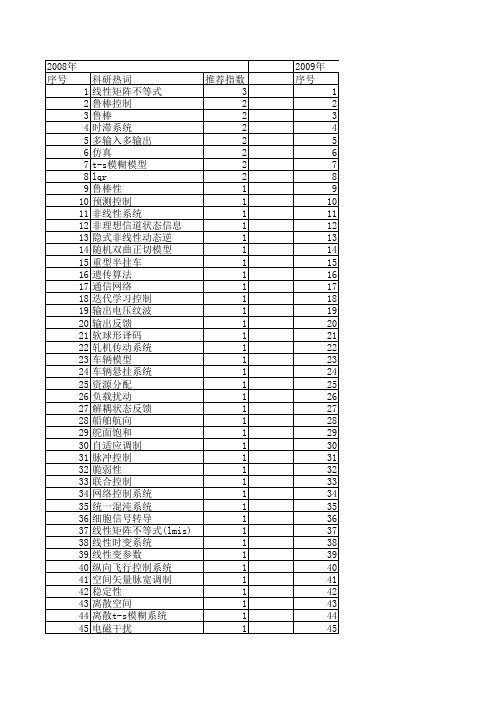
【系统仿真学报】_状态反馈_期刊发文热词逐年推荐_20140723
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91
推荐指数 3 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45
混合悬浮 油气弹簧 汽车悬架 永磁同步电机 柔索并联机器人 条件数 有限反馈 有记忆状态反馈控制器 有色观测噪声 最小均方误差 最大转矩比电流控制 最优跟踪控制 时滞模糊奇异摄动 数据融合 描述系统变换 振动二阶线性系统 指数稳定 悬浮控制系统 大型射电望远镜 多输入多输出 多用户 多时滞混沌系统 复用 复合控制 反馈 反步积分 参数化 前馈控制 切换面 分集 分数阶 分布式状态融合 冗余驱动 内置式永磁同步电机 信噪比 保性能控制 伺服系统 主动控制 不确定 vtol直升机 td.scdma t-s模型 pi~λ d~μ 控制器 kalman滤波 duffing系统 arneodo系统
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
反馈控制的基本原理
反馈控制的基本原理1.引言1.1 概述概述反馈控制是现代控制理论中的一个重要概念,它在各个领域都有广泛的应用。
从最简单的家用电器到复杂的工业自动化系统,都离不开反馈控制的支持。
反馈控制通过采集被控对象的输出信息,并将其与期望的输出进行比较,然后作出相应调整,以实现所需的控制目标。
在日常生活中,我们也常常使用反馈控制的原理。
比如,当我们开车时,会根据速度表上的速度和路况的变化,来调整油门和刹车的力度,以保持车辆稳定行驶。
这就是一个简单的反馈控制系统,由车速作为输入,驱动力作为输出。
反馈控制系统由被控对象、传感器、执行器和控制器等几个基本组成部分构成。
被控对象是系统中需要被控制的实际物理过程或设备,例如温度、速度、位置等。
传感器用于检测被控对象的状态或输出信息,并将其转化为电信号。
执行器根据控制信号进行相应的动作,改变被控对象的状态。
控制器是反馈控制系统的核心部分,它根据传感器反馈的信息和期望的输出信息之间的差异,计算出控制信号,使被控对象的输出逼近期望的输出。
反馈控制的基本原理是通过对被控对象的状态进行监测,并根据监测到的信息进行调整,使被控对象的输出接近期望的输出。
在控制过程中,控制器会不断地与被控对象进行交互,并进行参数调整,以实现系统的稳定性和性能要求。
通过不断地反馈和调整,反馈控制系统可以对被控对象的状态进行精确控制,从而实现预定的控制目标。
本文将详细介绍反馈控制的概念、基本组成和基本原理。
同时,还将讨论反馈控制在各个领域的实际应用,以及展望反馈控制的未来发展。
反馈控制是现代控制理论中的基础概念之一,对于提高系统的稳定性、精确性和鲁棒性具有重要意义。
深入了解反馈控制的基本原理,有助于我们更好地理解和应用控制技术,推动科技的发展和进步。
1.2 文章结构本文主要围绕反馈控制的基本原理展开讨论。
文章由引言、正文和结论三个部分构成。
在引言部分,我将对整篇文章进行概述,介绍反馈控制的基本概念以及文章的目的。
1_自动控制概论
u ce n IR 0.1n 30 0.5
解出:n=1497转/分
1500
n)
当通过负反馈构成闭环系统后,随着负载的 增加,转速下降很少,说明闭环后,系统的 负载能力和跟踪精度得到极大的提高。
扰动
F (s)
输入 偏差 输出
R( s )
30
E
I If
ur
+ u _ 1 + _
u
电动机
u2
测速机
当系统闭环后,则空载时测得: n=1500转/分
u2 = 6V
u =150V
u1 ur u2 6.1 6 0.1V
150 K K2 1500 0.1
若加载后,I=30A,问此时n=? 6 u2 6 u1 ur u2 6.1 n 1500 n 1500 而 6
特征:输入信号为预知的随时间变化函数 典型系统:热处理炉控制系统、程序控制机床、灌装生产线、 自动生产流水线。
1.2.3 按使用的数学方法分类
连续系统/离散系统
连续系统 系统传递的信号为时间的连续函数,用 微分方程描述。 离散系统 信号传递中至少有一处信号是脉冲序列 或数字编码。用差分方程描述。
51
1.2.1按控制方式分类
基本控制方式
1. 开环控制 2. 闭环控制 3. 复合控制
例1-1 水箱的水位控制系统
控制要求:水箱的水位保持一定的高度 控制原理:若水位比要求的水位高,则操纵控制阀,使其开 度减小;若水位比要求的水位低,则使控制阀开 度增大
控制要求:水箱的水位 保持一定的高度 工作原理: 实际水位下降,浮子下 移,通过杠杆机构使控 制阀开度增大
一类短时延网络化控制系统的故障检测与容错控制
s fiin o dt nfray poi tbl f h e s r alr. er sac lou e b e e se u ce t n i o s m tt sa i t o es n o i e Th ee rhas sdo s r rs tm c i o c i y t f u v y
)
() 1
【( = (() yt g f ) )
其中: ( ∈R 为系统状态 , ( 6R 为系统输入, ( ∈R 为系统输出, ( ∈R 为待检故障,厂 ・、 x, ) vt ) f ) f ) ( ) g・ ( 为定义在致密集上的非线性连续函数 。 )
I() c () 七= 七
其中: =P , =P , ( = 4 )
、
P
出 , ( 通过数学变换可 以表示为 ( :D ( 巨 , ) ) j )
巨为常 矩阵,【1 足 ()() I 记 . 数 0】 T < , 为 ,满
则系统 的全 局模 型 为:
a d i u p te r r t e e tt e f u to h y tm . i l t n i s d t e f e v l i ft e n t o t u ro o d t c a l ft e s se S mu a i S u e o v r y t ai t o h s h o i h d y
将式() 2离散化,考虑系统中存在的网络诱导时延因素,可以得到网络化控制系统的离散的模型:
R : ( iM: N … ()s T E / z 七 s A D , iM F I) HN
+ ) 七 + 一 ( )() ( ) =4 () ( ) 七 + )( () 3
o e s se mo e t n e t i a a tr , n h n a f z y sae o s r e s d sg e . e ft y tm d l h u c r n p r mee s a d t e u z tt b e v rwa e i n d As t h wi a h s n o al r y o c L f u t o e a t o to e r s s d a d f z y c n r l ra d f z y o s r e e s rf i e ma e u a l t l r n n r l h o y wa e n z o tol n z b e v r u - c t u u e u C — e i t o s we e a p id o t e e e t a It e e p o e t a e s se c n si it i O d sg me h d r p l .T h f c . l h s r v h tt y tm a t l man a n a n e h l
简述自动控制系统基本控制方式。
简述自动控制系统基本控制方式。
自动控制系统是一种使用一定的处理能力和控制手段,实现对实现输入状态与输出状态的调节和控制的系统。
自动控制系统有许多基本的控制方式,如定点控制、反馈控制、比例控制、积分控制、微分控制以及模糊控制等。
定点控制主要实现输出与设定值的追踪,通常采用比较控制的方式,利用反馈控制循环调整输出,以达到目标值的精确追踪。
反馈控制是指利用系统的反馈信号对输出进行闭环控制,以达到保持系统输出稳定的目的。
比例控制是基于反馈控制的基础上,根据反馈信号的增量,按照一定的比例参数,调节输出量,以达到输出稳定的目的。
积分控制是基于反馈控制的基础上,以输出稳定为前提,系统利用积分运算,改变输出,以达到定点控制的目的。
微分控制是基于反馈控制的基础,以达到输出稳定为前提,利用反馈信号的微分,改变输出,以达到相应变化的快慢为目标。
模糊控制是一种特殊的控制方式,它利用人类经验积累的模糊知识,建立模糊控制规则,使自动控制系统以和人类大致相同的控制方式进行处理,同时也可以提高控制系统的容错能力。
- 1 -。
基于输出反馈控制系统的鲁棒容错控制设计
Rob tFa l— T o e a nt o sgn Ba e n us u t lr ntCo r lDe i s d o Out utFe d c nt o s e p e ba k Co r lSy t m
QIJ n,S u HEN n — r Do g i ,CHEN —j n,W ANG n — l g Yi u Lig i n
r s lsde e u t mons r t ha hem e h s ago d o s a tt e an o r a a lt t a e t tt t od ha o r bu tf ul olr tc ntolc p biiy.
Ke r s F u t t l r n o t o ;Ou p tf e b c y wo d : a l— o e a tc n r l t u e d a k;Ro u t b s ;Ti — d l y s s e ;Un e t i me ea y tm c ran
( c o l f I f r to n o to gie rn S h o n o ma ina d C nr lEn ne i g,Lio ig Un v riyo toe m & Ch mia c n lg o a nn ie st f Per lu e c lTeh oo y,
实际控制系统中有一系列的执行器和传感器 , 这些执行器或传感器的失效可能会导致严重的后果 。控 制系统在一些执行器或传感器发生故障时, 利用余下的部件仍能保持渐近稳定 , 即系统具有完整性。完整 性是容错控制研究的一个重要方面。近年来, 关于完整性设计方面的成果很多 , 但大多采用状态反馈控制方 法, 例如文献 [ ] 1 采用带有时滞项的状态反馈控制律 , 设计时滞线性系统 的鲁棒容错控制器。但实际系统的 状态往往不是全部可 以测得 , 因此, 用状态反馈控制的方法在应用上受到 限制 。由于系统中参数不确定 】 性的广泛存在以及传感器 、 执行器发生故障的不可避免性, 必须同时考虑这些因素对系统控制带来的影响, 鲁棒容错控 制 问题 的研究 具有 实际 意义 。时滞 是实 际 系统 中经常 出 现 的 , 因此 , 不确 定 时滞 系 统 【是 更 接 3 近于实 际系统 的模 型 J 。总之 以参 数不确 定性时滞 系统为对 象 , 采用 带有 时滞项 的输 出反馈 控制律 [ , 6 针 ] 对执行器故障 、 传感器故障和两类故障同时存在的情况 , 探讨 了参数不确定 时滞系统的鲁棒容错控制问题。 仿真效果 良 , 好 从而说明该方法不仅具有理论意义 , 也有实际意义。
容错与冗余技术
容错与冗余技术容错控制的研究虽然面临着空前的挑战,但近些年来,相关研究领域,如鲁棒控制理论,模糊控制,神经网络控制研究的不断深入和发展,也给容错控制的研究带来了良好的机遇,提供了充分的条件。
而计算机控制技术、人工智能等技术的飞速发展,使得容错控制技术在实际工程中应用的可能性变得越来越大。
1.1 容错概念的提出提高系统的可靠性一般有两种办法:1、采用缜密的设计和质量控制方法来尽量减少故障出现的概率。
2、以冗余资源为代价来换取可靠性。
利用前一种方法来提高系统的可靠性是有限的,要想进一步的提高必须采用容错技术。
容错控制技术在国外发展的比较早,是由冯·诺依曼提出的。
随着八十年代微型计算机的迅速发展和广泛应用,容错技术也得到了飞速的发展,容错技术被应用到各个环境中。
我国的容错技术现在发展的也很迅速,一些重要的工作场合如航天、电厂等现在都采用了容错技术。
所谓容错:就是容许错误,是指设备的一个或多个关键部分法生故障时,能够自动地进行检测与诊断,并采取相应措施,保证设备维持其规定功能,或牺牲性能来保证设备在可接受范围内继续工作。
错误一般分为两类:第一类是先天性的固有错,如元器件生产过程中造成的错、线路与程序在设计过程中产生的错。
这一类的错误需对其拆除、更换或修正,是不能容忍的。
第二类的错后天性的错,它是由于设备在运行中产生了缺陷所导致的故障。
这种故障有瞬时性、间歇性和永久性的区别。
容错技术是提高系统可靠性的重要途径。
常采用的容错方法有硬件容错、软件容错、信息容错和时间容错。
1.1.1 智能容错的定义智能容错IFT(Intelligent Fault-Tolerance):就是设备在运行过程中一个或多个关键部件发生故障或即将发生故障之前,利用人工智能理论和方法,通过采取有效措施,对故障自动进行补偿、抑制、消除、修复,以保证设备继续安全、高效、可靠运行,或以牺牲性能损失为代价,保证设备在规定的时间内完成其预定功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第43卷增刊 2011年7月 南京航空航天大学学报
Journal of Nanjing University of Aeronautics&Astronautics Vo1.43 No.S
Ju1.2011
控制输入约束下非线性系统输出反馈容错控制 张登峰 谢德晓。 王 宏 王执铨 (1.南京理工大学机械工程学院,南京,210094; 2.曼彻斯特大学控制系统中心,曼彻斯特,M60 1QD; 3.中电集团第28研究所,南京,210007; 4.南京理工大学自动化学院,南京,210094)
摘要:针对一类非线性系统的执行器增益故障,在考虑控制输入幅值约束下,研究了故障系统的主动容错控制策 略。利用静态输出反馈控制策略,基于Lyapunov理论和线性矩阵不等式技术给出了重构容错控制器的递推设计 方法,确保故障闭环系统在满足给定控制输入幅值约束下的鲁棒稳定性,并具有与无故障正常系统接近的其他 优化控制性能。仿真算例表明了本文容错设计策略的有效性。 关键词:自动控制技术;主动容错控制;静态输出反馈;控制输入约束;非线性系统 中图分类号:TP273;TP13 文献标识码:A 文章编号:1005—2615(2o11)S.0045—05
output—Feedback Fault Tolerant Control for Nonlinear Systems with Control Input Constrains
Zhang Dengfeng ,Xie Dexiao。,Wang Hong ,Wang Zhiquan (1.School of Mechanical Engineering,Nanjing University of Science&Technology,Nanjing,210016,China; 2.Control Systems Centre,University of Manchester,Manchester,M6O 1QD,UK; 3.28th Research Institute,CETC,Nanjing,210007,China; 4.School of Automation,Nanjing University of Science&Technology,Nanjing,210016,China)
Abstract:The active fault tolerant control is investigated for a class of nonlinear systems with actuator faults and magnitude constraint in the control input.The abrupt faults in the gain matrix of actuators are modeled to be the constant type.Based on the Lyapunov theory and linear matrix inequality tech— nique,the iterative design method for reconfigurable fault tolerant controller is proposed by using static output feedback strategy,such that the corresponding closed—loop system is robust stable with the given magnitude constraints in the control input.Meanwhile,other control performances,such as disturbance rejection and quadratic cost function,are optimized to approach the performance in normal case as soon as possible.The simulation results of numerical example indicate the validity of the proposed fault toler— ant control strategy. Key words:automatic control technology;active fault tolerant control;static output feedback;control input constraint;nonlinear systems
随着现代复杂控制系统对可靠性要求日益提 高,容错控制(FTC)得到了广泛深入的研究 。]。其 中主动容错控制充分利用故障检测与诊断(FDD) 单元获得的故障信息,有针对性地进行故障容错设 计,通常可获得比被动容错更优的控制性能 s一3。因 此,基于FDD的主动容错控制近年来取得了丰硕
基金项目:国家自然科学基金(60804O27)资助项目;南京理工大学自主科研计划(NUST2010ZYTS012)资助项目。 收稿日期:2011—01—05;修订日期:2011—03—05 通迅作者:张登峰,男,副教授,E—mail..myfeidfzhang@yahoo.com.ca。 46 南京航空航天大学学报 第43卷 的成果[7 ]。但是,许多主动容错控制集中于使故障 后系统稳定或具有接近于正常系统的一些“软”控 制性能方面[5 ,对实际容错还需要满足的一 些“硬”约束条件,如常见的在正常控制和被动容 错中已有较多研究成果[12-141的执行器饱和特性约 束等,较少明确讨论[15-17]。此外,相对于状态反馈和 动态输出反馈,实际工程更易于实现的静态输出反 馈容错控制研究更少。鉴于此,本文针对执行器增 益非时变故障,研究了一类非线性系统在控制输入 约束下,基于静态输出反馈的主动容错控制策略, 利用多目标满意优化思想和线性矩阵不等式 (LMI)技术给出了一种递推容错控制器设计方法。 仿真算例说明了本文设计方法的有效性。
1 问题描述 考虑如下一类非线性模型系统 f (f)一Ax(t)+Bu0)+g(x,f)+Dw(f) I (f): (£)
(1) 式中: (£)∈R 、 ( )∈R 、U(£)∈R 分别为系统的 状态、可测输出和控制输入向量。’.’(£)∈R 为未知 的有界外扰,g( ,f)∈R”为描述系统非线性动态 的连续函数,且满足llg(x, )I I≤I IMx(f)l I,ME R畎 为已知定常矩阵。A, ,c,D为适维常矩阵, 且C行满秩。 假设1式(1)表示的系统发生故障前后是输 出反馈可稳的,初始状态 (0)和容错控制器切换时 的起始状态X(t,)在系统的吸引域内,且满足 (£,) ∈ (G)[1 ,其中 Q={ (f)∈R”:lG (£)I≤ ;i一1,2,…,r) (2) 式中:G 为一适维矩阵G的第i个行向量, >O为 给定标量。 假设2执行器I/O动态具有线性和对称幅值 饱和特性,且故障前后的饱和界不变[1引。 假设3假定FTC系统中FDD单元的性能满 足要求,控制器切换过程迅速,不破坏系统的稳定 性。 本文考虑执行器可能的常值型增益故障,在矩 阵 和输入U(£)问引入矩阵变量,(£)一diag{f , ,。,…,,r}∈ 且,(f)≠0加以描述,其中 ∈ :一If,, ],i一1,2,…,r, 和 分别为已知 故障上下界[10-11]。从而静态输出反馈控制器口(£)一 6y( )=GCx(t)作用下的故障闭环系统为
f (t)=Ax(t)+Bf(t)Gy(£)+g(x,£)+Dw(t)一 _{ AFcX( )+g(x, )+Dw( ) 【 (f)一Cx(£)
(3) 式中:AFc:A+Bf(t)GC,Bf(t)≠0。 考虑控制输入幅值“硬”约束 I砧f( )j≤ ==:1,2,…,,. (4) 式中:U (f)为第i个控制输入分量,O<a <oo为已 知上界。为便于研究,以常见的两类“软”约束性能 为例,输出对外扰的抑制性能为
l yT(t)y(t)dt 日( )一 d—Ww—(t—)w一
(t)dt
<p (5)
式中:O< <oo为有限的评估时间区间,O<fl<oo 为给定标量;二次型保成本性能为
.,=I Y (t)Ry(t)dt< 。一min (6) 其中R=R >0为给定加权矩阵,O< <oO为标 量。 至此,本文研究目标:对式(1)表示的系统,假 定有正常优化控制器G ,使无故障闭环系统稳定且 优化控制性能式(式(4~6))。当执行器发生故障 ,(t)≠,时,设计主动重构容错控制器G,,保证闭 环系统满足以下性能要求: (1)闭环系统鲁棒内稳定。 (2)控制输入信号lI(f)的幅值满足约束条件 式(4)。 (3)闭环系统外扰抑制性能条件式(5)和保成 本性能条件式(6)等趋于正常系统的最优性能。
2主动容错策略 为便于设计分析,先给出一种正常控制下无容 错鲁棒满意优化控制器的设计。然后给出主动容错 控制设计方法。 2.1无故障多目标优化控制 定理1对无故障系统式(1),给定性能指标参 数 和ai,若存在矩阵z、Q—Q >O、非奇异阵 和 标量 >O,使优化问题 min trace( 。) (7) Q,Z,w, S.t. WC===CQ (8)
『-一J (o ]<0 (9) Lx(O) 一Q J
[ C—TZ Tj-]<。 ㈣ L ZC 一 J