全转动副三自由度并联机器人设计说明书
并联机器人设计论文设计

并联机器人设计论文摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。
这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
尖键词:三自由度并联机构;并联机器人;设计;1 •课题国外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的硏究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授Hunt,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt 之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta并联机器人,在Delta 机构的支链中采用平行四边形机构约束动平台的3个转动自由度° Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在Tricept并联机床上采用的构型是由Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个副驱动支链并由导向装置约束动平台。
Tsai通过自由度分析提取支链的运动学特征'系统硏究了并联机构的综合问题,特别硏究了一类实现三自由度平动的并联机构。
delta机器人结构设计说明书

摘要随着机器人技术的快速发展,并联机械手的应用领域越来越广,已成为当今机器人领域新的研究热点。
针对并联机械手机构比传统串联机械手更复杂的问题,本文以一种轻型高速的三自由度Delta并联机械手为例,在完成其运动学的基础上,对并联机械手进行了建模以及装配。
首先,本文介绍了三自由度并联机械手机构的工作原理,并对其进行了运动学分析。
其中,对机构的自由度进行的计算,采用几何法求得了其运动学正解以及其运动学逆解。
其次,对机构进行了速度模型及雅克比矩阵的分析。
实现了solidworks对机构的零部件与装配图三维建模。
最后,通过个零部件的配合,实现了三自由度并联机械手的装配。
关键词:并联机械手;三自由度;3D建模ABSTRACTWith the rapid development of robot technology, parallel manipulator used more and more widely, has become the hot spot in the field of new robots today. In view of the parallel manipulator mechanism more complex than the traditional serial manipulator problem, based on a lightweight high-speed three degree of freedom parallel manipulator as an example, the Delta at the completion of its kinematics, on the basis of the parallel manipulator has carried on the modeling and assembly.First, this paper introduces the working principle of three degrees of freedom parallel manipulator mechanism, and carries on the kinematics analysis. Among them, the institution of degree of freedom for the calculation of geometric method is used to obtain the positive kinematics solution and its inverse kinematics solution. Second, the institutions for the velocity model and the Jacobi matrix analysis. Implements the solidworks for spare parts and assembly drawing 3 d modeling of the organization. Finally, by a spare parts, implements the three degree of freedom parallel manipulator assembly.Keywords: Parallel manipulator;Three degrees of freedom;3D modeling目录摘要 (I)ABSTRACT (II)第1章引言 (1)1.1 课题背景 (1)1.2 课题目的及意义 (1)1.3 课题研究内容 (1)第2章并联机械手的概述 (3)2.1 关于并联机械手 (3)2.1.1 并联机械手的定义与特点 (3)2.1.2 并联机械手的研究现状 (4)2.2 并联机械手的工业应用 (6)2.3 本章小结 (6)第3章三自由度并联机械手的运动学分析 (7)3.1 机构简介 (7)3.2 自由度分析 (7)3.3 运动学分析 (8)3.3.1 运动学逆解 (9)3.3.2 运动学正解 (9)3.3.3 速度模型及雅克比矩阵 (11)3.4 本章小结 (12)第4章delta机器人的结构设计.. ..... ..... ..... ..... ..... (14)4.1 delta机器人的总体结构设计 (14)4.2 上顶板 (14)4.3 电机座设计 (15)4.4 电机选取 (16)4.5 减速器选择与设计 (17)4.6 轴承校核 (18)4.7 本章小结 (19)第5章并联机械手的建模与装配 (21)5.1 三维建模软件solidworks简介 (21)5.2 并联机械手的三维建模 (21)5.3 并联机械手零件实体造型 (21)5.4 并联机械手装配 (22)5.5本章小结 (24)总结.....................................................................................,. (25)参考文献 (26)致谢 (27)第1章引言1.1课题背景翻开整个人类的历史,就会发现这是一部不断认识世界、改造世界的发展历史,一部伴随生产工具不断提高的生产力进步史。
solidworks实例教程——三自由度并联机器人及其零件图工程图
solidworks实例教程——三自由度并联机器人及其零件图工程图
————————————————————————————————作者:————————————————————————————————日期:
三自由度并联机器人工程图
一、装配体工程图:
1)进入工Solidworks ,新建工程图
,
2)编辑图纸格式:自定义图纸大小420mm×297mm,绘制边框:矩形距离各边线为10mm。
3)从装配体创建工程图,选择创建主视图,剖视面A和B,局部放大视图C和D,并建立等轴测图。
整体图如下:
4)添加标注:
在剖视图A-A和局部放大视图上添加主要尺寸,以及配合尺寸,并添加重要平面的表面粗糙度,如下图所示:
5)生成材料明细表,并生成零件序号:
6)添加其余表面粗糙度符号,并添加技术要求,如下图:
二、BASE工程图
1)进入工Solidworks ,新建工程图
,图纸可调用已有图纸。
2)插入主视图,俯视图和左视图,并添加局部放大视图A。
如图:
3)在各个视图上使用智能尺寸添加尺寸:
4)添加一个剖面视图,使用样条曲线选择要剖切的部分,并设置剖切深度,形成的局部剖视图如下:
5)标注表面粗糙度,并注明其余表面粗糙度,再添加技术要求:
6)填写表格,完成的工程图如下:
三、球副底座零件工程图
1)新建工程图,并调入现有图纸,插入模型并选择球副底座零件图,然后生成如图的主视图,轴测图,以及全剖视图A-A:
2)添加尺寸标注,表面粗糙度标注,如图:
3)添加其余粗糙度符号,和技术要求,并填写表格:。
三自由Delta并联机器人运动学反解
∵a3a4,b3b4都在平面ɑ上且不平行 ∴ɑ//β
所知:驱动臂长度为Lb、从动臂长度为 La、ΔB1B2B3的外切圆半径为R,ΔP1P2P3 的 外 切 圆 半 径 为 r 、 O' 的 坐 标 为 (X,Y,Z);
所 求 : 三 个 伺 服 电 机 的 转 动 角 度 θi (i=1,2,3),θi为第i个伺服电机驱动臂对 基座平台的夹角。
Return
Back
Return
工作过程:伺服电机驱动主动臂转动,并 带动从动臂,进而实现动平台的三维平动。
➢ 动平台只能平动,不可旋转; ➢ 动平台为等边三角形,自由度为3;
a1 a2
b3 a3 a4 b4
b1 b2
设静平台为平面ɑ,动平台为平面β。 ∵a1a2// a3a4, a1a2 // ɑ
Lb sini
·E3'
Pi之间的距离为 :(x2x1)2 (y2 y1)2 (z2 z1)2
2tan θi
万
sinθi
1
2 tan 2 θi
能 代 换 式
2
1 tan 2 θi
cosθi
1
tan 2
2 θi
2
2tan 2 θi
Delta空间反解
上端的等边三角形为静平台,下端的等边三角形为
动平台,动静平台之间的每条支链主要有伺服电动机,
驱动臂(主动杆),从动臂(四个球铰副及四根连杆构成
的平行四边形)。
E1
B1
B3
E2 P2
B2
P1 P3
E3
Return
模型简化图
三维直角坐标系以静平台上三个电机安装处围成的等边 三角形ΔB1B2B3的外切圆圆心为坐标原点O,以垂直于线 段B1B3的方向为X轴正方向,垂直于B1B2的方向为Y轴正 方向,按照右手定则构建静态空间直角坐标系。同理, 以等边三角形ΔP1P2P3的外切圆圆心为坐标原点O',以 垂直于线段B1B3的方向为X'轴正方向,垂直于P1P2的方 向为Y'轴正方向,按照右手定则构建动态空间直角坐标 系。设静平台上的伺服电机安装处为Bi (i=1,2,3),平 行四边形的两个平行长杆等效为一个虚拟连杆,如图所 示 , 设 等 效 的 虚 拟 连 杆 的 顶 点 为 Ei(i=1,2,3) , Pi (i=1,2,3),模型图如图所示
三自由度自动送料机及其驱动单元设计说明书

毕业设计(论文)三自由度自动送料机及其驱动单元设计教学系: xxxxx指导教师: xxxxx专业班级: xxxxx学生姓名:xxxxx二零xx年六月毕业设计(论文)任务书毕业设计(论文)开题报告注:1. 开题报告应根据教师下发的毕业设计(论文)任务书,在教师的指导下由学生独立撰写,在毕业设计开始后三周内完成;2.设计的目的及意义至少800字,基本内容和技术方案至少400字;3.指导教师意见应从选题的理论或实际价值出发,阐述学生利用的知识、原理、建立的模型正确与否、学生的论证充分否、学生能否完成课题,达到预期的目标。
郑重声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
本人签名: xxxx 日期: xxxxx目录摘要 (1)ABSTRACT (2)1 绪论 (3)1.1 研究背景 (3)1.2 研究意义 (3)1.3 国内外现状 (4)1.4 设计内容 (5)2自动送料机的方案拟定 (6)2.1 研究技术问题 (6)2.2 总体方案确定 (6)2.3 原料的定位 (7)2.4 传动机构主要部件选择及规格 (7)2.4.1 同步带的选用 (7)2.4.2 丝杆螺母副的选用 (8)2.5 伺服电动机的选用 (11)2.5.1 步进电动机的参数及其选择 (11)2.5.2 步进电动机的计算与选型 (12)2.5.3 步矩角的选择 (12)T的计算 (12)2.5.4 步进电动机转轴上的总转动惯量eqT的计算 (13)2.5.5 步进电动机转轴上的等效负载转矩eq2.5.6 步进电动机的初选 (14)2.5.7 步进电动机的性能校核 (14)3 机械传动系统的设计及计算 (15)3.1 送料机整体结构重量的估算 (16)3.2 X轴传动设计 (16)3.3 Y轴传动设计 (17)3.3.1 滚珠丝杠的计算和选取 (17)3.2.3 同步带选择 (19)3.4 Z轴传动传动设计.......................... (20)4 步进电动机的选型 (21)4.1 X轴步进电机确定 (21)4.2 Y轴步进电机确定 (22)4.3 轴步进电机选择 (23)5 控制系统设计 (23)5.1 硬件系统设计 (23)5.2 PLC系统的选取 (25)5.2.1 PLC系统硬件的组成及选择 (25)5.3 系统硬件的连线 (26)5.4 PLC控制程序设计 (26)5.4.1 I/O接口分布: (26)5.4.2 工作程序 (26)5.4.3 PLC控制流程图 (26)5.4.4 PLC梯形图 (28)结论 (29)致谢 (30)参考文献 (31)附录 (32)摘要本设计就是为冲床设计自动送料机,所谓三自由度就是能在水平面上两个相互垂直的方向以及在垂直于水平面的方向上转,因此,可以根据加工的实际情况进行零件的定位调节,从而解决了传统送料机的局限性。
一类3自由度空间并联机器人机构的设计及分析
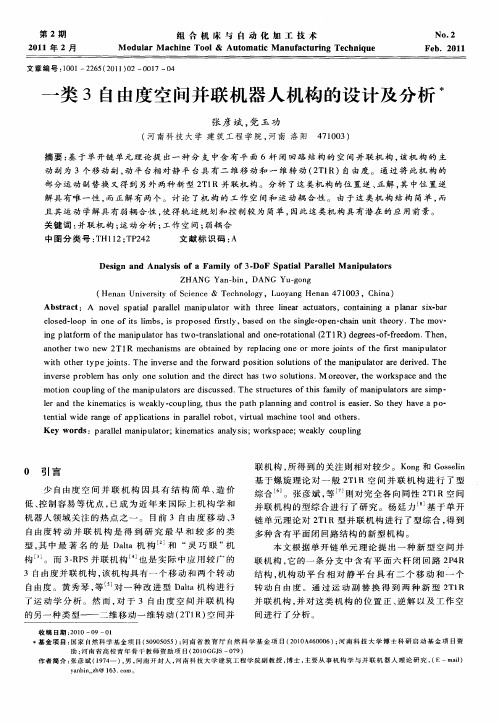
( n n Unv ri fS in e& T c n lg ,L o a g He a 7 0 3,C ia He a iest o ce c y e h oo y u y n n n4 1 0 hn )
Absr t A n v ls ta r l lm a pu ao ih hre i a a t a o s o a i a a sx b r tac : o e pailpaal ni lt r w t t e l e ne r c u t r ,c nti ng a pln r i・ a n
c o e l o i n t i b ,i pr po e is l l s d—o p n o e of i l s m s s o s d f ty,b s d o h i l pe ‘ h i ni t o y. r a e n t e snge o n c a n u t he r Th o ‘ e m v
De i n a n l ss o m iy o Do Sp ta r le a pu a o s sg nd A a y i fa Fa l f3- F a i lPa a llM ni l t r ZHANG n bn, DANG Ya — i Yu— o g gn
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- 1 - 河北工业大学城市学院 毕 业 论 文
作 者: 周** 学 号: ***** 系(专业): 机械系 专 业: 机械设计与制造及其自动化 题 目: 全转动副三自由度并联机器人
指导者: 李** 教授 (姓 名) (专业技术职务)
评阅者: (姓 名) (专业技术职务)
2015 年 6月 11 日 - 1 -
毕业设计(论文)中文摘要 题 目:全转动三自由度并联机器人 摘要: 本设计中,对全转动副三自由度并联机器人的结构进行了全新的设计,对以前关于此方面机器人设计成果仅仅作为一个参考,通过对机器人支链的全新设计成功使机器人完成解耦,并且不会出现奇点,该全转动副三自由度并联机器人由动平台和静平台组成,静平台为机架底端,而动平台则是由完全相同的三个支链组成,即,三个支链相互垂直,支链末端位于同一水平面上,三个支链末端组成动平台,并且所有的运动副均为转动副。该机构的重复定位精度:<+/-0.025mm(平动);动平台三个方向平动范围:>220mm,最打平动速度:>0.4m/s;最大负载:1.5kg(包括末端机械手)。在设计中,规划设计出了一套精致的机构方案使机器人结构紧凑并具有简单实用的功效,由于此机构具有高度的对称,所以可以承受各个方向的动载荷,机器人的运动是一个重点难点,本次设计在机构运动小巧灵活方面做出了很大的改进使其性能更加优越,因此对扩大并联机器人的应用领域具有现实意义。 本次毕业设计的基本顺序同本科期间进行的课程设计一样,均是先根据任务书提出方案,验证方案的可行性,方案通过则进行具体的结构设计并且对机构运动经过了正反解论证,选择了正确实用的设计路线。最后,采用绘图软件制作装配图,零件图,利用三维软件绘制三维模型并进行组装得到机器人三维模型。
关键词: 自由度 串并联 机器人 三自由度 河北工业大学城市学院2015届本科毕业论文
- 2 - 毕业设计(论文)外文摘要
Title All three rotational degrees of freedom parallel robot,Deputy.
Abstract: Designed a new mobile with three degrees of freedom decouple from the body of the robot, singularity does not occur, the parallel robot platform and static platforms distributed between the three branches of orthogonal connected, and all transmission Vice are the rotation pair. Repeat positioning accuracy of the agency :<+/- 0.025mm (translation); Moving platform, the scope of translation in three directions:> 220mm, the maximum translation speed:> 0.4m/s; maximum load:> 1.5Kg (including end manipulator). Institutions are given a set of sophisticated programs with simple and practical effect. As the high symmetry directions on the can withstand the amount of load. Compact and flexible movement in the body has made a lot of effort, but also has a smaller installation space, expanding the application field of parallel robots relevance.
Keywords: Parallel robot. Rotation pair. Translation. Mechanical machine design. 河北工业大学城市学院2015届本科毕业论文
- 3 - 目录 1 绪论 ........................................................................................................................ - 4 - 1.1 引言 .............................................................................................................. - 4 - 1.2 此次课题研究背景和意义 ........................................................................ - 4 - 1.3 串并联机器人的国内外研究现状、使用范围及发展趋势 ...................... - 5 - 1. 4 本次毕业设计主要完成工作 ..................................................................... - 6 - 1.4.1 基本内容 ............................................................................................ - 6 - 1.4.2 课题研究拟采用的手段和工作路线 ................................................ - 6 - 2 总体方案的设计 .................................................................................................... - 7 - 2.1 总体布局的设计 ....................................................................................... - 7 - 3 由基本参数选定标准件的型号 .......................................................................... - 10 - 3.1 减速机的选择 .......................................................................................... - 10 - 3.2 选择伺服电机并对其检验 ...................................................................... - 12 - 3.3 轴承的选择及校核 .................................................................................... - 15 - 3.4 联轴器的选择 .......................................................................................... - 17 - 4.1 支链尺寸的确定 ........................................................................................ - 19 - 4.2 对主动轴尺寸的确定及校核 .................................................................... - 20 - 4.3 对支链上转动副的设计 ............................................................................ - 22 - 4.4 支链末端设计 ............................................................................................ - 25 - 5 机构的整体布局设计及机架设计 ...................................................................... - 26 - 结 论 ...................................................................................................................... - 29 - 参考文献 .................................................................................................................... - 31 - 致谢 ............................................................................................................................ - 32 -