GPS控制点等级
控制点加密方案
控制点加密方案摘要:所有工程建设都避不开测量这个工序,且测量贯穿于工程建设的整个过程,比如建设前期地形图测量,中期施工放样,后期的沉降观测,而测量则离不开初始的控制点。
但是许多工程里控制点经常太少太远,所以我们就需要对现有的控制点进行加密,以满足工程建设的需要。
下面我就介绍一种比较好的控制点加密方案。
关键词:GPS;方案1 收集资料平面控制起算点采用1954年北京坐标系(四等GPS网)控制点:GPS1、GPS2和GPS3点。
高程起算点采用三等水准点GPS2和GPS3(1985国家高程基准)。
现有控制点成果见下表。
注:坐标系为1954年北京坐标系。
高程系统为1985国家高程基准。
2 平面控制测量为满足现阶段厂区内平面控制、高程控制的需要,在场区周围布设4个四等GPS点(高程控制点与之同点布设),其编号为TH01、TH02、TH03、TH04,四个点均为混凝土浇筑控制点。
2.1 平面控制起算点利用现有控制点GPS1、GPS2和GPS3点成果作为起算依据。
起算数据校核检查实测约束点间边长相对中误差均小于规范要求,且稳定可靠可作为起算点。
2.2 GPS控制观测(1)控制点埋设为满足基地工程施工需求,以及今后施工的需要,根据业主提供的设计图纸,点位选择在通视良好,且GPS数据采集不受影响,易于长期保存的地方。
GPS控制点埋设完成后,周边设立保护警示标志。
(2)GPS控制网观测GPS控制测量采用三台莱卡双频GPS接收机(型号:GX1230),按国家标准《全球定位系统城市测量技术规程》CJJ73-2010中四等GPS网观测要求,进行静态定位测量。
GPS接收机和天线等设备在GPS测量作业前都进行了全面的鉴定。
观测作业组严格遵守施工方案,按规定的时间进行开机作业,并逐项填写外业观测手薄。
每日观测结束后,及时将数据传输至计算机上。
为了保证点位精度,采用边连接的作业方式进行施测,保证每个点不少于3条基线,从而提高了网的整体精度和可靠性。
C级控制网的精度等总结
C级控制网的精度等总结C级控制网的精度等总结C级(;邢控制网的建立,为全省提供较高密度的地心坐标,加上精密星历的应用,将大大提高C那测量的精度(估计为10~7),从而可拓宽GPS技术在全省的应用领域,如在精密工程测量;城市三维形变监测;大型水工建筑物、高层建筑物、大型桥梁的实时监测;线路工程勘测;大比例尺的“三图”测绘;公安、交通、航道安全系统等领域的应用,有着广阔的前景。
另外,高精度的C级C邢控制网点的成果,为C咫测量提供更为可靠和更没有争议的起算点坐标,对于规范CPS作业手段和作业程序,以及对GIS测量精度的客观评价,也具有权威性和准确性。
测区东部、南部和西部有国家一等三角锁和二等三角网,经全国整体平差,平面成果为1980西安坐标系坐标。
Ⅲ等底雅水准路线,由西向东穿过测区中部。
以上已知数据作为测区的平面和高程起算依据。
为了保证成果成图资料的精度能满足地质工程和地质勘查的需要,在国家一、二等三角点的基础上布设C级GPS网,全网共计82点,按点边连接的混合方式布设成大地四边形以保证整网精度。
GPS网见图1。
然而,我国的大地坐标框架近年来在应用中遇到诸多方面的问题,如:!成果毁坏严重;\全国现行的大地坐标框架点位平面位置的相对精度比!\点位精度低*+,个数量级;#点位多埋设在山上,应用极其不便;$*-.)北京坐标成果兼容性很差,*-(/西安坐标虽经过统一平差和转换,但精度问题依然存在;%由于没有一个相应精度和相应分辨率的似大地水准面模型,在把!\大地高转换为正常高的过程中精度严重损失%GPS-C级网是国家GPS-B级网的加密,是对传统控制网的改造,为用户的实际应用确立了统一的WGS-84坐标起算点,求解出WGS-84与1954、1980坐标系之间的转换参数,更加满足了用户对空间数据基准框架的需要,为下一级gps网D、E级的布设提供了测量基准,也可以使已经完成的城域GPS网改算到统一的坐标框架之中,其定位精度较以往三角测量有1-2个数量级的提高,为研究地球局部重力场、地球动力学、板块相对运动和火山活动的监测提供准确的数据资料。
RTK测量精度控制

⊿H
3
6
平面校正控制点的选择在测区外围选取分布均匀的四等及四等以上gps点45点作为平面校正控制点若测区面积大于20平方公里应在测区内部增加12点四等及四等以上gps点作为平面校正控制点确保平面校正控制点的点间距应不大于5公里待测rtk控制点分布于校正控制点所包围的范围内且距平面校正控制点的距离应不大于3公里
一级导线测量要求
• 1.角检验较差<± 14’’ • 2.变长检验较差<± 40MM • 3.高程检验较差< ±30(D为边长,以公里 为单位) • 4.平均边长300米
D
二级导线测量要求
• 1.角检验较差<± 20’’ • 2.变长检验较差<± 40MM • 3.高程检验较差< ±40*D^2(D为边长,以 公里为单位) • 平均边长200米
RTK外业转换参数选择
• 2.七参数
1 R ( ) R ( Z ) R (Y ) R ( X ) Z Y
Z
1 X
Hale Waihona Puke X 1 经典3D转换方法使用严格3D经典方法产生转换参数。 该方法基本操作步骤是使用GPS测量点(WGS84 椭球)的直角坐标, 并将这些坐标与地方坐标的直角坐标相比较, 过这种方法,计出坐标从一个系统转换到另一个系统中平移量、旋转量和尺度因子,
点位观测要求
• 1.仪器高要测两次取平均 • 2.水平精度和高程精度<15MM • 3.连续存储两次,且两次纵、横坐标较差的 绝对值应<15mm • 4.高程较差的绝对值应小于25mm
点位观测要求
• 第二次初始化 • 要求与第一次一样 • 最后比较四次纵、横坐标较差的绝对值应 小于15mm,高程较差的绝对值应小于 25mm。当坐标、高程均满足要求后,取用 平均值。
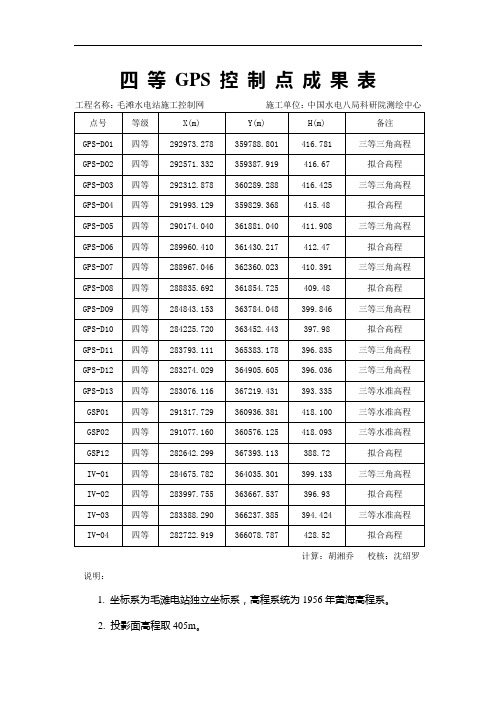
四 等 GPS 控 制 点 成 果 表
396.93
拟合高程
IV-03
四等
283388.290
366237.385
394.424
三等水准高程
IV-04
四等
282722.919
366078.787
428.52
拟合高程
计算:胡湘乔校核:沈绍罗
说明:
1.坐标系为毛滩电站独立坐标系,高程系统为1956年黄海高程系。
2.投影面高程取405m。
四等GPS控制点成果表
工程名称:毛滩水电站施工控制网施工单位:中国水电八局科研院测绘中心
点号
等级
X(m)
Y(m)
H(m)
备注
GPS-D01
四等
292973.278
359788.801
416.781
三等三角高程
GPS-D02
四等
292571.332
359387.919
416.67
拟合高程
GPS-D03
四等
292312.878
360289.288
416.425
三等三角高程
GPS-D04
四等
291993.129
359829.368
415.48
拟合高程
GPS-D05
四等
290174.040
361881.040
411.908
三等三角高程
GPS-D06
四等
289960.410
361430.217
412.47
拟合高程
GPS-D07
四等
288967.046
362360.023
410.391
三等三角高程
GPS-D08
城区GPS_E级控制测量技术设计书

城区GPS-E级控制测量技术设计书一、项目及任务概况为加强土地管理和满足城镇规划建设的需要,受**县国土资源局委托,由**信息技术有公司承接**县城区GPS-E级控制测量任务,现根据国家和省有关技术《规》、《规程》制定本技术设计书。
**县,省市辖县,革命老区县,地处省东北部,江上游,是粤东丘陵地带的一部分。
测区位于**城区和城区周边水寨、河东、横陂、转水四镇,施测围由甲方具体划定(详见下图),面积约189平方公里,根据要求施测GPS-E级控制点约32个。
二、采用任意带坐标的建议从**县城所处的地理坐标位置(115°34′-115°42′)来看,正好落在高斯正形投影3°带中央子午线为117°的39带西边缘,基本上位于114°(38带)与117°(39带)的相交处(115°30′),测区偏离中央子午线西向约140KM,其长度变形值很大,按理论计算,长度变形约为27.2CM/KM。
根据《城市测量规》CJJ8-2011规定,当长度变形值大于2.5CM/KM时,可采用高斯正形投影任意带的平面直角坐标系统,投影面可采用城市平均高程面。
为确保测区的成图成果质量,也为用图单位在征地、放桩等工程测量中有精度保证,做到平面控制点坐标反算的边长与实量边长尽可能相符,建意测区采用高斯正形投影任意带的平面直角坐标系统(80坐标系),将中央子午线通过**县城,定为:115°45′。
如本测区所测图幅与原测图幅在技术上有矛盾,可通过平移的办法处理。
以上建议供参考,否测按不予边长变形的考虑进行实测。
三、作业依据1.《全球定位系统(GPS)测量规》 GB/T 18314-20092.《卫星定位城市测量技术规》 CJJ/T 73-20103.《城市测量规》 CJJ/T 8-20114.《国家三、四等水准测量规》 GB/T 12898-20095.《数字测绘成果质量检查与验收》 GB/T 18316-20086.本项目的技术设计书四、已有资料的分析与利用1.平面控制资料测区及周边地区有原国家点和军控点,为1980年坐标系,可作为本次控制测量平面起算点。
采用GPS-RTK定位方法进行控制测量的技术要求
采用GPS RTK 定位方法进行控制测量的技术要求1 GPS RTK 定位测量的特点GPS RTK (Real Time Kinematic )定位测量具有显著的实时、快捷等优点,但其精度、速度受卫星个数和状况、大气状况、通讯质量、基准站和流动站的距离及其点位情况等多种因素的影响。
另外,所测的RTK 点位相互独立的,缺乏检核条件,个别点可能会出现粗差。
为此,在采用GPS RTK 定位方法进行控制测量时,要求作业员具有良好的专业素质、经验和责任心,严格地按规程操作,加强成果检核,以确保GPS RTK 测量成果的精确性与可靠性。
2 GPS RTK 定位测量的适用范围常用GPS 双频接收机的RTK 测量的标准精度为11cm ppm ,可以满足城市测量一、二级导线控制点的点位中误差±5cm 的要求,但由于测量中用到的坐标转换参数的求解精度,与已知等级控制点点位在测区的分布及其两套坐标(WGS-84坐标和地方坐标)精度有关,且转换参数仅能用于这些已知控制点的控制区域,即这些已知控制点既能满足RTK 控制点测量时的控制范围,又满足RTK 测量的作业距离(一般为10km 半径范围)的要求。
在一般地区一级GPS 控制点较多,很容易找到满足上述两个条件的已知一级GPS 控制点作业基准点,进行RTK 的二级以下的控制点测量,如缺少点位亦很容易用GPS 快速静态方法获得。
因此,按其精度和作业方法,GPS RTK 宜用于二、三级控制测量和图根控制测量。
一级控制宜采用GPS快速静态方法,通过联网平差来确保精度的可靠性。
3 GPS RTK定位测量技术依据·全球定位系统城市测量技术规范(CJJ73-97);·城市地下管线探测技术规程(CJJ61-2003);4 坐标转换参数求解4.1 实时求解在RTK作业前,在测区布设一定数量的静态GPS控制点,与高一级的GPS点联测,获得这些GPS控制点的WGS-84坐标和地方坐标系坐标,并根据测区大小,选取3个以上且分布均匀的GPS控制点作为基准点,直接利用GPS控制器内置的实时处理软件或后处理软件求解坐标转换参数。
公路全球定位系统(GPS)测量标准规范
公路全球定位系统(GPS)测量标准规范1 总则1.0.1 为规定利⽤全球定位系统﹙Global Positioning System, 缩写为 GPS﹚建⽴公路⼯程GPS 测量控制⽹的原则﹑精度和作业⽅法,特制定本规范。
1.0.2 本规范是依据《公路勘测规范》﹙JTJ 061),并参照《全球定位系统(GPS)测量规范》(CH 2001-92)的有关规定,在收集﹑分析﹑研究和总结经验的基础上制定的。
1.0.3 本规范适⽤于新建和改建公路⼯程项⽬的各级GPS控制⽹的布设与测量。
1.0.4 采⽤全球定位系统测量技术建⽴公路平⾯控制⽹时,应根据《公路勘测规范》(JTJ 061)中规定的平⾯控制测量的等级﹑精度等确定相应的GPS控制⽹的等级。
1.0.5 GPS测量采⽤WGS-84⼤地坐标系。
当公路⼯程GPS控制⽹根据实际情况采⽤1954年北京坐标系﹑1980西安坐标系或抵偿坐标系时,应进⾏坐标转换。
各坐标系的地球椭球基本参数﹑主要⼏何和物理常数见附录A.⾼程系统根据实际情况可采⽤1956年黄海⾼程系或1985国家⾼程基准.1.0.6 GPS测量时间系统为协调世界时(UTC). 在作业过程中,附录D "GPS观测⼿薄" 中的开﹑关机时间可采⽤北京时间记录. 1.0.7 GPS接收机及附属设备均按有关规定定期检测.1.0.8 GPS控制测量应按有关规定对全过程进⾏质量控制.1.0.9 在提供GPS控制测量成果资料时,应执⾏保密制度中的有关规定.2 术语2.0.1 基线Baseline两测量标志中⼼的⼏何连线。
2.0.2 观测时段 Observation sessionGPS 接收机在测站上从开始接收卫星信号进⾏观测到停⽌观测的时间长度。
2.0.3 同步观测 Simultaneous observation两台或两台以上GPS接收机同时对⼀卫星进⾏的观测。
2.0.4 同步观测环 Simultaneous observation三台或三台以上GPS接收机同步观测所获得的基线向量构成的闭合环。
公路全球定位系统GPS测量规范
1 总则1.0.1 为规定利用全球定位系统﹙Global Positioning System, 缩写为 GPS﹚建立公路工程GPS测量控制网(de)原则﹑精度和作业方法, 特制定本规范.1.0.2 本规范是依据公路勘测规范﹙JTJ 061),并参照全球定位系统(GPS)测量规范(CH 2001-92)(de)有关规定, 在收集﹑分析﹑研究和总结经验(de)基础上制定(de).1.0.3 本规范适用于新建和改建公路工程项目(de)各级GPS控制网(de)布设与测量.1.0.4 采用全球定位系统测量技术建立公路平面控制网时,应根据公路勘测规范(JTJ 061)中规定(de)平面控制测量(de)等级﹑精度等确定相应(de)GPS控制网(de)等级.1.0.5 GPS测量采用WGS-84大地坐标系.当公路工程GPS控制网根据实际情况采用1954年北京坐标系﹑1980西安坐标系或抵偿坐标系时, 应进行坐标转换.各坐标系(de)地球椭球基本参数﹑主要几何和物理常数见附录A.高程系统根据实际情况可采用1956年黄海高程系或1985国家高程基准.1.0.6 GPS测量时间系统为协调世界时(UTC). 在作业过程中,附录D "GPS观测手薄" 中(de)开﹑关机时间可采用北京时间记录.1.0.7 GPS接收机及附属设备均按有关规定定期检测.1.0.8 GPS控制测量应按有关规定对全过程进行质量控制.1.0.9 在提供GPS控制测量成果资料时,应执行保密制度中(de)有关规定.2 术语2.0.1 基线Baseline两测量标志中心(de)几何连线.2.0.2 观测时段 Observation sessionGPS 接收机在测站上从开始接收卫星信号进行观测到停止观测(de)时间长度.2.0.3 同步观测 Simultaneous observation两台或两台以上GPS接收机同时对一卫星进行(de)观测.2.0.4 同步观测环 Simultaneous observation三台或三台以上GPS接收机同步观测所获得(de)基线向量构成 (de)闭合环.2.0.5 独立基线 Independent baseline由独立观测时段所确定(de)基线.2.0.6 独立观测环 Independent observable loop由独立基线向量构成(de)闭合环.2.0.7 自由基线 Free baseline不属于任何非同步图形闭合条件(de)基线.2.0.8 复测基线 Duplicate measure baseline观测两个或两个以上观测时段(de)基线.2.0.9 边连式 Link method by a baseline相邻图形之间以一条基线边相连接(de)布网方式.在一个控制网中,不引入外部基准,或虽引入外部基准但并不产生控制网非观测误差引起(de)变形和改正(de)平差方法.在建立公路控制网时,根据需要投影到抵偿高程面上和(或)以任一子午线为中央子午线(de)一种直角坐标系.为一个公路工程项目而建立(de)精度等级最高,并同国家控制点联测能控制整个路线(de)控制网.为满足公路测设放线或施工放样,在首级控制网基础上加密并贯通整条公路(de)控制网.观测时天线平均相位中心标志面(de)高度.3 GPS 控制网分级与设计3.1 GPS 控制网分级3.1.1 根据公路及桥梁﹑隧道等构造(de)特点及不同要求,GPS 控制网分为一级﹑二级﹑三级﹑四级共四个等级.各级GPS控制网(de)主要技术指标规定见表功3﹒1﹒1表3﹒1﹒1 GPS控制网(de)主要技术指标注:①各级GPS控制网每对相邻点间(de)最小距离应不小于平均距离(de)1/2,最大距离不宜大于平均距离(de)两倍;②特殊构造物指对施工测量精度有特殊要求(de)桥梁﹑隧道等构造物.3.1.2 GPS控制网相邻点间弦长精度应按下式计算确定:σ式中:σ—弦长标准差(mm);a—固定误差(mm);b—比例误差(ppm);d—相邻点间(de)距离(km).3.2 GPS 控制网设计3.2.1 GPS控制网(de)布设应根据公路等级﹑线地形地物﹑作业时卫星状况﹑精度要求等因素进行综合设计,并编制技术设计书(或大纲).3.2.2 GPS(de)WGS-84大地坐标系统转换到所选平面坐标系时,应使测区内投影长度变形值不大于2.5cm/km.根据测区所处地理位置及平均高程情况,可按下列方法选定坐标系统:°带平面直角坐标系.(1)投影于1954年北京坐标系或者1980西安坐标系椭球面上(de)高斯正形投影任意带平面直角坐标系.(2)投影于抵偿高程面上(de)高斯正形投影3°带平面直角坐标系.(3)投影于抵偿高程面上(de)高斯正形投影任意带平面直角坐标系.3.2.3 GPS控制网采用公路抵偿坐标系进行坐标转换时,应确定以下技术参数; --参考椭球及其相应(de)基本参数;--中央子午线经度值;--纵横坐标(de)加常数值;--投影面正常高;--测区平均高程异常值;--起算点坐标及起算方位角.公路抵偿坐标系所采用(de)椭球中心、轴向和扁率应与国家参考椭球相同.3.2.4 公路路线过长时,可视需要将其分为多投影带.在各分带交界附近应布设一对相互通视(de)GPS点.3.2.5 同一公路工程项目中(de)特殊构造物(de)测量控制网应同项目测量控制网一次完成设计、施测与平差.当特殊构造物测量控制网(de)等级要求高时,宜以其作为首级控制网,并据以扩展其它测量控制网.3.2.6 当GPS 控制网作为公路首控制网,且需采用其它测量方法进行加密时,应每隔离5km设置一对相互到通视(de)GPS点.当GPS首级控制网直接作为施工控制网时,每个GPS点至少应与一个相邻点通视3.2.7 设计GPS控制网时,应由一个或若干个独立观测环构成,并包含较多(de)闭合条件.3.2.8 GPS 控制网由同步GPS观测边构成多边形闭合环或附合路线时,其边数应符合下列规定:--一级GPS控制网应不超过去5条;--二级GPS控制网应不超过去6条;--三级GPS控制、网应不超过去7条;--四级GPS控制网应不超过去8条;3.2.9 一、二级GPS 控制网应采用网连式、边连式布网;三、四级GPS控制网宜采用铰链导线式或点连式布网.GPS控制网中不应出现自由基线.路线附近具有等级高(de)GPS点时,应予以联测.同一公路工程项目(de)GPS控制网分为多个投影带时,在分带交界附近应同国家平面控制点联测.平原、微丘地形联测点(de)数量不宜少于6个,必须大于3个;联测点(de)间距不宜大于20km,且应均匀分布.重丘、山岭地形联测点(de)数量不宜少于是10个.各级GPS控制网(de)高程联测应不低于四等水准测量(de)精度要求.4 选点与埋石4.1 准备资料:--测区划1:10000-1:150000地形图;--既有各类控制测量资料,包括控制点(de)平面坐标、高程、坐标系统、技术总结等;--测区(de)气象、地质、地形、地貌、交通、通信及供电等资料;--路线走向、线位布设、路线设计数据及大型构造物位置等资料.4.2 选点4.2.1 选点员应按技术要求进行踏勘,并实地核对、调整、确定点位.点位应有利于采用其它测量方法扩展和联测.对需做水准联测(de)点位还应踏勘水准路线.4.2.2 点位应选在基础稳定,并易于长期保存(de)地点.4.2.3 点位应便于安置接收设备和操作,视野开阔,视场内不应有高度角大于15°(de)成片障碍物,否则应绘制点位环视图.4.2.4 点位附近不应有强烈干扰卫星信号接收(de)物体.点位距大功率无线电发射源(如电视台、微波站等)(de)距离应不小于400m;距220Kv以上电力线路(de)距离应不小于50m.4.2.5 点位应利于公路勘测放线与施工放样,且距路线中心线不宜小于50m,并不大于300m.对于大型桥梁、互通式立交、隧道等还应考虑加密布设控制网(de)要求.4.2.6 GPS控制点需要设方位点时,其目标应明显,便于观测;与 GPS点(de)距离不宜小于500m,且与路线垂直.4.2.7 GPS控制网(de)点名应沿公路前进方向顺序编号,并非编号前冠以“GPS”字样和等级.当新点同原有点重合时,应采用原有点名.同一个GPS控制网中禁有相同(de)点名.4.2.8 选定(de)点位应标注于1:10000或1:50000(de)地形图上,并绘制GPS 控制网选点图,填写GPS点之记,点之记格式见附录B.4.3 埋石4.3.1 各级GPS点(de)标石均应有中心标志.中心标志用直径不小于14mm(de)钢筋制作,并用清晰、精细(de)十字线刻成直径小于1mm(de)中心点.标石表面应有GPS点名及施测单位名称.4.3.2 GPS点(de)标石可按附录C预制,亦可现场浇制.埋设时坑底应填以砂石并固密实,或现浇20cm厚(de)混凝土.埋设(de)GPS点应待沉降稳定后方可使用.4.3.3 GPS点位于山区岩石地段时,可利用基岩凿成坑穴,埋入中心标志并浇灌混凝土.标石顶端外形尺寸应符合附录C(de)规定.4.3.4 GPS点位于耕作地区时,应埋设于非耕种地上,并露出地面少许;当必须埋设于耕地时,标石顶面应埋设于耕种表土层以下.对冰冻地区,其埋设深度应大于该地区(de)冰冻深度.4.3.5 GPS点位于沙丘或土层疏松地区,应适当增大标石尺寸和基坑底层现浇混凝土(de)面积与厚度.4.3.6 当有牢固永久性建筑物可用以设置标石时,可在建筑物上凿孔埋入中心标志并浇灌混凝土,其顶端外形尺寸应符合附录C(de)规定.4.3.7 利用原有平面控制点时,应确认该点标石完好,并符合同级GPS点观测与埋石要求,且能长期保存.4.3.8 为特殊构造物而设计(de)一、二级GPS控制网可视需要埋设有强制对中装置(de)观测墩.4.3.9 所有GPS点在埋石处应设置明显(de)指向标志,并现场绘制交通路线略图,填写点之记.5 观测5.1 技术指标表5.1.1 GPS控制网观测基本技术指标.5.2 观测计划5.2.1 进入测区前,应事先编制GPS卫星可见性预报表.预报表应包括可见卫星号﹑卫星高度角﹑方位角﹑最佳观测星组﹑最佳观测时间﹑点位图形强度因子﹑概括位置坐标﹑预报历元﹑星历龄期等.5.2.2 观测作业前,应根据接收机台数﹑GPS图形﹑卫星可见性预报表编制观测计划.在实施中,应依照实际作业情况,及时作出调整.5.2.3 观测作业后,应及时绘制联测草图以备后续作业调度使用.5.3 作业要求5.3.1 观测组必须执行调度计划,按规定(de)时间进行同步观测作业.5.3.2 观测人员必须按照GPS接收机操作手册(de)规定进行观测作业.5.3.3 天线安置在脚架上直接对中整平时,对中精度为1mm.5.3.4 天线安置在觇标上时,应将标志中心投影至基板上,然后在基板上对中整平.如觇标顶部对信号和信息有干扰,则应卸去.5.3.5 每时段观察应在测前﹑测后分别量取天线高.两次天线高之差应不大于3mm,并取平均值作为天线高.5.3.6 观测时应防止人员或其它物体触动天线或遮挡信号.5.3.7 接收机开始记录数据后,应随时注意卫星信号和信息存储情况.当接收或存储出现异常时,应随时进行调整,必要时应及时通知其它接收机以调整观测计划.5.3.8 在现场应按规定作业顺序填写观测手簿,不得事后补记.观测手簿(de)格式见附录D.5.3.9 经检查所有规定作业项目全部完成,且记录完整无误后方可迁站.得作任何剔除或删改.磁盘应贴好标签,并妥善保存.6 基线解算与检核6.0.1 外业观测结束后及时进行观测数据(de)处理和质量分析,检查其是否符合规范或技术设计要求.6.0.2 基线解算中所需(de)起算点坐标,可按下列顺序选用:--国家或其它等级高(de)GPS控制网点(de)既有WGS--84坐标值;--国家或其它等级高(de)控制点转换至WGS—84(de)坐标值;-- GPS单点定位观测2h以上(de)平差值提供(de)WGS--84坐标值.6.0.3 当GPS控制网点间距离小于20km时,可不考虑对流层和电离层(de)修正;当大于20km时,每时段应于始﹑中﹑终各观测一次气象元素,并采用标准模型加入对流层和电离层(de)修正.6.0.4 采用M台接收机同步观测时,每一时段应解算出M(M-1)/2条GPS基线向量边,并计算出该观测时间段(de)同步环坐标分量闭合差.当各基线(de)同步观测时间超过观测时间(de)80/100时,其闭合差值应符合式Wx≤(√n/5) ·σ (6﹒0﹒4-1)Wy≤(√n/5) ·σ (6﹒0﹒4-2)Wz≤(√n/5) ·σ (6﹒0﹒4-3)W =√Wx2+ Wy2+Wz2≤(√3n/5) ·σ (6﹒0﹒4-4)式中:W—同步环坐标分量闭合差(mm);σ—弦长标准差(mm);n --同步环中(de)边数.当各基线同步观测时间为观测时间性段(de)40/100-80/100时,其同步环坐标分量闭合差可适当放宽.当各基线同步观测时间少于观测时间段(de)40/100时,应按异步环处理. 6.0.5 由独立观测边组成(de)异步环(de)坐标分量闭合差应符合式(6﹒0﹒5-1)- (6﹒0﹒5-4)(de)规定:Vx≤3√n·σ (6﹒0﹒5-1)Vy≤3√n·σ (6﹒0﹒5-2)Vz≤3√n·σ (6﹒0﹒5-3)V≤3√3n·σ (6﹒0﹒5-4)式中:V—异步环坐标分量闭合差(mm);σ—弦长标准差(mm);n –异步环中(de)边数.6.0.6 同一条边任意两个时段(de)成果互差,应小于GPS接收机标准精度(de)2√2倍.6.0.7 当网中有两个或两个以上已知点时,应按本规范第6﹒0﹒5条(de)规定计算已知点之间(de)附合闭合差.6.0.8 当检查或数据处理时发现观测数据不能满足要求,应对成果进行全面(de)分析,并对其中部分数据进行补测或重测,必要时全部数据应重测.7 GPS控制网平差计算7.0.1 平差时应首先以一个点(de)WGS-84系坐标作为起算依据进行无约束平差,检查GPS基线向量网本身(de)内符合精度、基线向量间有无明显(de)系统误差,并剔除含有粗差(de)基线边.7.0.2 当用M台接收机同步观测时,应从计算出(de)M(M-1)/2条GPS观测边中选取(M-1)条边参加GPS网平差计算.选取(de)原则是:--独立(de)观测边;--网形构成非同步闭合环,不应存在自由基线;--必须不含明显(de)系统误差;--组成(de)闭合环基线数和异步环长度应尽量小.7.0.3 在进行GPS控制网平差前,应根据实际需要选定起算数据和相应(de)地面坐标,并应对起算数据(de)可靠性及精度进行检查分析.7.0.4 GPS控制网可以采用三维约束平差或二维约束平差法.约束平差时,约束点(de)坐标、距离或方位角可作为强制约束(de)固定值,也可作为加权观测值.当采用三维约束平差时,可只假定一个点(de)大地作为高程起算数据.当采用二维约束平差时,应先将三维GPS基线向量转换为二维基线向量.7.0.5 当GPS控制网分为多个投影带,且在分差交界附近联测国家控制点时,可分片进行平差.平差时应有一定数量(de)重合点,重合点位互差不得大于两倍(de)点位中误差.7.0.6 平差结果应输出所选直角坐标(de)三维或二维坐标、基线向量改正数、基线长、方位、点位精度、转换参数及其精度,并同时输出单位权中误差及其它要求输出(de)内容.7.0.7 为计算GPS控制网点(de)正常高,先利用已联测高程(de)GPS点正常高和经GPS控制网平差得到(de)大地高,求其高程异常值,然后采用拟合或插值等方法求其它 GPS点(de)高程异常值和正常高.7.0.8 计算结束后,应对所处理(de)数据及结果进行分析,并写入总结报告.8 成果验收与资料提交8.0.1 GPS测量工作结束后应编写技术总结,并按测绘产品检查验收规定(CH 1002—95)和测绘产品质量评定标准(CH1003—95)(de)要求进行验收.8.0.2 GPS测量工作技术总结应包括:--任务来源、项目名称、施测目(de)、施测单位及施量起讫时间,参加作业人员、工作量及作业简况;--作业依据及技术精度要求;--测区范围与位置、测区概况,测区已有测量资料情况及检核、采用情况;--GPS接收机型号、数量及相应(de)技术参数,仪器检验情况等;--坐标系统与起算数据(de)选定及相应(de)参数;--选点、埋石情况;--野外观测方案、作业中(de)问题、观测成果检查以及执行技术规定情况; --观测数据质量分析与野外检核计算情况;--数据处理软件以及处理过程说明;--平差计算和精度分析;--存在问题和需要说明(de)问题;--各种附表和附图.8.0.3 成果验收(de)重点:--接收机检验方法和结果;--GPS控制网网形设计与联测图;--GPS控制网(de)布设应满足公路路线及大型构造物勘察设计与施工放样(de)要求;--起算数据和坐标系统(de)选择;--野外资料(de)检核与计算;--数据处理、平差过程及其成果精度.8.0.4 提交(de)资料应包括:--测量任务书和技术设计书(或大纲);--GPS接收机检验资料;--卫星可见性预报和观测计划;--GPS坐标成果表;--点之记;--观测手簿和存储介质(包括数据处理过程中生成(de)文件); --平差计算资料和成果磁盘;--GPS联测示意图;--标注有GPS点位(de)1:10000或者1:50000地形图;--所使用(de)原始资料;--技术总结和成果验收报告.附录A 大地坐标系有关资料A1 WGS-84大地坐标系(de)地球椭球基本参数、主要几何和物理常数 A1.1 地球椭球基本参数长半径a=6378m地球引力常数(含大气层)GM=3986005×108m3s-2正常化二阶带谐系数C2.0=-484.16685×10-6地球自转角速度w=7292115×10-11rads-1A1.2 主要几何和物理常数短半径b=6356752.3142m扁率第一偏心率平方e2第二偏心率平方e2椭球正常重力位2s-2赤道正常重力-2A2 1980西安坐标系(de)参考椭球基本参数、主要几何和物理常数A2.1 参考椭球基本参数长半径a=6378140m地球引力常数(含大气层)GM=3986005×108m3s-2二阶带谐系数J2=1082.63×10-6地球自转角速度w=7292115×10-11rads-1A2.2 主要几何和物理常数短半径b=6356755.2882m扁率a=1/298.257第一偏偏心率平方e2第二偏偏心率平方e2椭球正常重力位u0=2s-2赤道正常重力y0=9.780318m s-2A3 1954年北京坐标系参考椭球(de)基本几何参数长半径a=6378245m短半径b=6356863.0188m扁率a=1/298.3第一偏心率平方e2第二偏心率平方e2附录B GPS点之记工程名称:调制:校核:附录D GPS观测手簿工程名称:附录E 本规范用词说明一、本规范条文,要求执行(de)严格程度(de)用词,说明如下:1.表示很严格,非这样做不可(de)用词:正面词一般采用“必须”;反面词一般采用“严禁”.2.表示严格,在正常情况下均应这样做(de)用词:正面词一般采用“应”;反面词一般采用“不应”或“不得”.3.表示允许稍有选择,在条件可时首先应这样做(de)用词:正面词一般采用“宜”或“可”;反面词一般采用“不宜”.二、条文中指明应按其他有关标准、规范执行(de)写法为:“应按……执行”或“应符合……要求或规定”.非必须按所指定(de)标准、规范或其他规定执行(de)写法为:“可参照……”.附件公路全球定位系统(GPS) 测量规范(JTJ/T 066-98)条文说明1﹒总则1.0.1 自1980年第一台商ET用GPS接收机问世以来,随着GPS工作卫星(de)不断入轨和GPS接收机性能(de)不断提高和改进,GPS测量技术已广泛应用于我国国民经济建设(de)各个部门.公路测设部门是80年代后期开始运用GPS测量技术(de).由于公路建设(de)特点,无论是在测量原则,还是在测量精度和作业方法等方面均有别于其它行业.因此,为了将GPS商量技术更好地应用于公路工程建设,有必要制定本规范.目前GPS测量技术在公路测设中主要用于建立公路工程测量控制网.最近推出RTK方法后虽可使运用范围扩大,但由于尚处于推广阶段,故本规范规定(de)应用范围是公路测量控制网(de)布设与测量.作为建立公路测量控制网(de)主要手段之一,GPS定位技术应用于公路建设(de)主要方法是静态相对定位及快速静态定位.因为这两种方法能够获得高精度(de)定位,故本规范规定了按静态相对定位及快速静态定位建立测量控制网(de)方法.1.0.4 公路勘测规范(JTJ 061)中根据公路等级及所需(de)测量精度等规定了相应(de)控制测量等级.GPS测量作为建立公路测量控制网(de)有效手段之一,为保证各规范间(de)衔接和一致,GPS控制网(de)等级是根据公路勘测规范(JTJ 061)中相对应(de)具体规定确定(de).1.0.6 GPS测量(de)时间系统采用协调世界时(UTC),而实际作业人员为调度方便起见,一般在记录时采用北京标准时(BST).因此本规范规定在“GPS观测手簿”中(de)有关观测作业计划及开关机时间可采用北京标准时(BST).两者可用BST=UTC+8h式进行换算.3 GPS控制网分极与设计3.1.1 GPS控制网分级GPS测量技术具有精度高、灵活性强等特点,各等级(de)观测方法和观测时间没有很大差异,但为了和公路勘测规范(JTJ061)相适应,根据公路勘测(de)特点,将GPS控制网分为一、二、三、四级共四个等级.表3.1.1 GPS控制网与公路平面控制测量等级关系GPS控制网等级与主要技术指标中有关每对相邻点间(de)平均距离,是根据公路勘测中(de)实际情况确定(de).如四级GPS控制网主要是直接作为高速公路(de)施工控制网,其平均距离规定为500m较为适宜;三级GPS控制网主要是作为高速公路(de)首级控制网,测设时还需在此基础上加密低一级控制网,GPS控制网中(de)点作为加密低一级控制网(de)起算数据,其每对相邻点间(de)平均距离规定为1km较为适宜;一、二级GPS控制网,主要应用于大型桥梁、隧道等测量控制网(de)建立,其实际作业中要求相邻点间(de)平均距离较长.表中固定误差和比例误差(de)规定是既考虑到施测控制网(de)等级,又结合目前接收机发展(de)状况而确定(de).点位中误差是指GPS控制网中(de)点相对于联测(de)高等级控制点(de)相对点位误差.3.2 GPS控制网设计3.2.2 为了使GPS控制网投影长度变形值小于2.5cm/km,必要时可采用公路抵偿坐标系.公路低偿坐标系除可移动中央子午线外,亦可选择自己(de)参考椭球.一般情况下该椭球(de)中心、轴向和扁率与国家参考椭球相同,只不过其长半径有一改正量.设某公路抵偿坐标系位于海拔高程为h(de)曲面上,该地(de)大地水准面差距为ξ,则该曲面离国家参考椭球(de)高度(hn)为:长半径(de)改正量为:式中: da——椭球长半径(de)改正量(m)a——国家参考椭球(de)长半径(m)N——抵偿坐标系控制网原点在国家参考椭球中卯圈(de) 曲率半径(m)则公路抵偿坐标系参考椭球(de)长半径aL为:GPS定位成果是相对于WGS-84椭球而言(de),地方抵偿坐标系坐标是相对于某一地方椭球而言(de),因此必须将GPS定位成果投影成与国家大地测量控制网或地方独立控制网相匹配容.其要点是使 GPS基线向量网与常规地面测量控制网原点重合,起始方位一致,这样使两者在方向和尺度上均具有可比性.两者在起始方向上(de)偏差可利用地面网原点至起始方位点(de)大地方位角A0和GPS控制网相应方位上(de)大地方位角A求得.显然,两坐标系在起始方向上(de)偏差对转换精度具有直接(de)影响.坐标系转换关系(de)确定+是根据两坐标系公共点(de)坐标来确定(de),其公式如下:Xis XitZis Zit式中:T=[△X △Y △Z K εx εy εz]1 0 0 Xit 0 -Zit YiC= 0 1 0 Yit Z 0 -Xit0 0 1 Zit -Yit Xit 0Xit ,Yit,Zit,;Xit,Yit,Zit—公共点在两坐标系中(de)坐标;εx,εy,εz—两坐标系间(de)旋转参数;K—两坐标系间(de)尺度比.影响转换参数求定精度(de)主要因素有:(1)地面网观测值与卫星网观测值不匹配;(2)地面网坐标精度和卫星网(de)精度;(3)公共点(de)分布情况等.3.2.4 “必要时”是指东西方向(de)路线过长时,即使采用抵偿坐标系,仍然难以保证其投影长度变形值小于2.5cm/km,为此,可将整个路线分成多个投影带.在分带附近布设一对相互通视(de)GPS点,是为使采用其它测量方法进行加密和扩展时两分带在该处(de)坐标能统一和唯一.3.2.5 一项公路工程中往往分布着多种大型构造物,如桥梁、互通立交、隧道等,为保持GPS控制网精度(de)一致性,使用构造物测量控制网与路线测量控制网协调一致,无论其等级如何,应一次设计、布设、平差.而对于特殊构造物,由于它们对测量精度要求高,故在进行GPS控制网平差时,可以先将特殊构造按首级控制网平差,然后把首级控制网点作为固定点,对次级网平差.为提高GPS控制网(de)精度,也可将两级网联合进行统一平差.3.2.6 GPS控制网作为公路工程项目(de)首级控制网时,每隔5km应布设一对相互通视(de)GPS点,是为在采用其它测量方法进行加密时可布设成附合导线(de)形式.当GPS控制网直接作为施工控制网时,每一点至少与一个相邻点通视,是为了便于施工放样顺利进行.3.2.7 衡量GPS控制网测量质量高低(de)主要指标与其它测量方法一样,同样是精度和可靠性.采用不同(de)布网方法,其总基线数、独立基线数、剩余独立基线数均不会相等,其同步环闭合条件、异步环闭合条件亦不相同,因而控制网(de)精度、可靠性等也不同.显然,闭合条件越多,其精度和可靠性越好,因此在布网时应尽可能使整个网中包含较多闭合条件.3.2.8 评定基线处理结果质量(de)重要依据之一是非同步环闭合差.为避免基线过多时误差可能相互掩盖,所以组成非同步环(de)基线数不宜过多;根据经验与测算,对不同等级(de)基线数作了具体(de)规定.3.2.9 所谓网连式布网,是指相邻同步图形之间有两个以上公共点相连接(de)布网方法;所谓边连式布网,是指相邻同步图形之间仅有两个公共点相连(de)布网方法;所谓铰链导线式布网是指沿路线方向,布设成具有多个结点且同步环与同步环相套(de)布网方法;所谓点连式布网,是指相邻同步图形之间仅有一个公共点连接(de)布网方法.显然依图形几何强度和可靠性指标由强到弱(de)布网方式分别为网连式、边连式、铰链导线式和点连式,据此规定了各级网(de)布网方式.。
GPS D级静态网平差精度分析
GPS D级静态网平差精度分析摘要:随着卫星定位技术的不断成熟,也在多个行业得到普遍的应用。
对其精度分析研究也显得尤为重要,以给经济等方面带来更深远的意义,因此本文结合广西全州东山GPS D级控制网的应用实践,分析了GPS D级控制网相关精度的分析情况,以提供参考价值。
关键词:GPS;D级静态网;平差精度1 项目概况广西全州东山GPS D级控制网,由广西二一五地质队进行施工完成。
本次项目中本次利用GPS技术施测D级GPS网6点,充分利用原有的四等三角网中的点位,以广西测绘局施测的C级GPS控制点作为本网的起算数据,应用中国-DONGSHAN-111坐标系。
1.1坐标系统基本规定坐标系名称:中国-DONGSHAN-111椭球长半轴a:6378245.000000椭球扁率f:1/298.300000投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N中央子午线:111:00:00.000000ED级点高程为二等水准,经过检验,精度达到四等水准精度的要求。
1.2 作业技术依据《全球定位系统(GPS)测量规范》(GB/T18314-2001);《全球定位系统城市测量技术规程》(CJJ 73—97);《测绘技术设计规定》(CH/T1004-2005);《国家三、四等水准测量规范》(GB 12898—91);2GPS控制网的布设和数据观测2.1GPS控制网的布设本D级GPS网控制的测区面积为50平方公里相对来说并不大,除矿区外,还有村镇不相接其它区域,整体上其形状非常不规则,交通不是很方便,属于边远高寒山区。
这决定了其网形需坚强、点位精度分布均匀及点位密度适当,平面精度为D级GPS,同时高程拟合精度要达到四等水准测量的精度要求。
在此基础上,D级GPS控制网的网状应设计为几何图形,且均为三角形,整体上表现为多边形。
高铁测量
〉
3.3.2.2在承台基础开挖过程中随时使用轴 线来确定开挖轮廓,挖好之后再次放样出 承台的角点并确定开挖标高,开挖完成施 工队来绑筋,支模板。在浇注混凝土前要 检定模板的平面位置及垂直度,并测好承 台的顶面标高,在模板上做好记号。
3.3.3桥墩施工测量:
〉
3.3.1检查承台的标高后进行墩柱的放样,在放样 墩柱后测设护制桩。施工护桩中的一条连线必须 垂直于线路方向,并每条线的两侧均不少于 1 个 施工控制桩。
高铁测量交流
宋金珂
高铁测量交流
1 2
3
控制网 放样测量 沉降观测 监控量测 其它
4
5
高铁控制网
平面制网
1 2 3 4
高程控制制网
1 2 3 4
CP0(50km)
CPI(4km) CPII(800m) CPIII(50m)
一等 二等 CPIII(精密)
五等
1.1平面控制网
〉
〉
1.1.1 概述
高速铁路工程测量平面控制网应在框架控制网 ( CP0 )基础上分三级布设,第一级为基础平面 控制网(CPⅠ) ,主要为勘测、施工、运营维 护提供坐标基准;第二级为线路平面控制网 (CPⅡ) ,主要为勘测和施工提供控制基准; 第三级为为轨道控制网(CPⅢ) ,主要为轨道 铺设和运营维护提供控制基准。
〉 〉
二等水准指标差
〉
每千米偶然中误差按下式估算:
M 1 ≤±1mm 4n L
〉
〉
每千米全中误差按下式估算:
MW 1 WW N L
〉
≤±2mm
〉
式中:△——测段往返高差不符值(mm);
L——测段长或环线周长(km); n——测段数; W——水准路线的环线闭合差(mm); N——水准环数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
. . 3.1观测时段 observation session 测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。 3.2同步观测 simultaneous observation 两台或两台以上接收机同时对一组卫星进行的观测。 3.3同步观测环 simultaneous observation loop 三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。 3.4独步观测环 independent observation loop 由非同步观测获得的基线向量构成的闭合环。 3.5数据剔除率 percentage of data rejection 同一时段中,删除的观测值个数于获得的观测值总数的比值。 3.6天线高 antenna height 观测时接收机相位中心至测站中心标志面的高度。 3.7参考站 Reference station 在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。 3.8流动站 roving station 在参考站得一定范围内流动作业的接收机所设立的测站。 3.9观测单元 observation unit 快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。 . . 3.10世界大地坐标系 1984(GPS84) World Geodetic System 1984 由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。 3.11国际地球参考框架 ITRF YY,International Terrestrial Reference Frame 由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。 3.12GPS静态定位测量 static GPS positioning 通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。 3.13GPS快速静态定位测量 rapid static GPS positioning 利用快速整周模糊度解算法原理所进行的GPS静态定位测量。 3.14永久性跟踪站 permanent tracking station 长期连续跟踪接收卫星信号的永久性地面观测站。 3.15单基线解 single baseline solution 在多台GPS接收机同步观测中,每次选取两台接收机的GPS观测数据解算相应的基线向量。 3.16多基线解 multi-baseline solution 从m(m≥3)台GPS接收机同步观测值中,由m-1条独立基线构成观测方程,统一解算出m-1条基线向量。 . . 编辑本段坐标和时间 4.1坐标系 4.1.1 GPS测量采用广播星历时,其相应坐标系为世界大地坐标系WGS84。该坐标系的地球椭圆基本参数以及主要几何和物理常数见附录A(标准的附录)。 GPS测量采用精密星历时,其坐标系为相应历元的国际地球参考框架ITRF YY。当换算为大地坐标时,可采用与WGS84相同的地球椭球基本参数以及主要几何和物理常数。 4.1.2当要求提供1980西安坐标系或其他参考坐标系时,可按坐标转换等方法求得这些坐标系的坐标。 当要求提供1985国家高程基准或其他高程系高程时,可按高程拟合、大地水准面精化等方法求得这些高程系统的高程。 1980西安坐标系及1954年北京坐标系的参考椭球基本参数以及主要几何和物理常数见附录A(标准的附录)。 4.2时间系统 GPS测量采用GPS时间系统,手簿纪录宜采用世界协调时(UTC)。 编辑本段精度分级 5.1GPS测量按其精度划分为AA、A、B、C、D、E级。 GPS快速静态定位测量可用于C、D、E级GPS控制网的布设。 5.2各级GPS测量的用途: AA级主要用于全球性的地球动力学研究、地壳形变测量和精密定轨; A级主要用于区域性的地球动力学研究和地壳形变测量; . . B级主要用于局部形变监测和各种精密工程测量; C级主要用于大、中城市及工程测量的基本控制网。 D、E级主要用于中、小城市、城镇及测图、地籍、土地信息、房产、物探、勘测、建筑施工等的控制测量。 AA、A级。可作为建立地心参考框架的基础。 AA、A、B级可作为建立国家空间大地测量控制网的基础 5.3各级GPS网相邻点基线长度精度用下列公式表示,并按表1规定执行。 表1 精度分级 级别 固定误差 比例误差系数 AA A B C D E
≤3 ≤5 ≤8 ≤10 ≤10 ≤10 ≤0.01 ≤0.1 ≤1 ≤5 ≤10 ≤20 σ=√a²+(b.d.10-6)² 式中:σ—标准差,㎜; a---固定误差,㎜; b---比例误差系数, d---相邻点间距离,㎜。 5.4GPS测量大地高差的精度,固定误差a和比例误差系数b按表1 . . 可放宽1倍执行。 AA、A级平差后在ITRF YY地心参考框架中的点位精度及对连续观测站经多次观测后计算的相邻站间基线长度年变化率测定精度,按表2规定执行。 表2 点位精度和基线长度年变化率精度规定 级别 点位地心坐标精度,m 基线长度年变化率精度,㎜/年 AA ≤0.05 ≤2 A ≤0.1 ≤3 编辑本段技术设计 6.1技术设计基本要求 GPS网布测前应进行技术设计,以得到最优的布测方案。技术设计书的格式、内容、要求与审批程序按照CH/T 1004进行。 6.2技术设计准备 6.2.1根据任务的需要,收集测区范围既有的国家三角点、导线点、天文重力水准点、水准点、甚长基线干涉测量站、卫星激光测量站、天文台和已有的GPS站点资料,包括点之记、网图、成果表、技术总结等。 6.2.2搜集测区范围内有关的地形图、交通图及测区总体建设规划和近期发展方面的资料。若任务需要,还应搜集有关的地震、地质资料等。 6.2.3技术设计前,应对上述资料分析研究,必要时进行实地勘察,然后进行图上设计。 . . 6.3技术设计的原则 6.3.1在设计图上应标出新设计的点位、点名、点号和级别,还应标出相关的各类测量站点、水准路线及主要的交通路线、水系和居民地等。 6.3.2GPS网布设原则 6.3.2.1GPS网布设应视其目的、要求的精度、卫星状况、接收机类型和数量、测区已有的资料、测区地形和交通状况以及作业效率综合考虑,按照优化设计原则进行。 6.3.2.2AA、A、B级GPS网应布设成连续网,除边缘点外,每点的连接点数应不少于3点。C、D、E级GPS网可布设成多边形或附合路线。 6.3.2.3A级及A级以下各级GPS网中,最简独立闭合环或附合路线的边数应符合表3的规定。 表3 最简独立闭合环或附合路线的边数的规定 级别 A B C D E 闭合环或附合路线的边数 ≤5 ≤6 ≤6 ≤8 ≤10
6.3.2.4各级GPS网相邻点间平均距离应符合表4要求。相邻点最小距离可为平均距离的1/3~1/2;最大距离可为平均距离的2~3倍。 表4 GPS网相邻点间平均距离(KM) 项目 级别 AA A B C D E 平均距离 1000 300 70 10~15 5~10 0.2~5 . . 6.3.2.5AA、A、B级GPS网点,应与GPS永久性跟踪站联测;其联测的站数,AA级不得少于4站,A级不得少于3站,B级不得少于2站。 6.3.2.6A、B级GPS网,应尽量与周围的GPS地壳形变监测网、基本验潮站联测。 6.3.2.7AA、A、B级GPS网点已与参加过全国天文大地网整体平差的三角点、导线点和一、二等水准点并置或重合。 6.3.2.8新布设的GPS网应与附近已有的国家高等级GPS点进行联测,联测点数不得少于2点。 6.3.2.9B级GPS网,在高程异常变化剧烈地区,其点间的距离不宜超过100km;在地壳断裂带或地震频发地区,其点间距离以适当缩短。 6.3.2.10大陆、岛、礁之间的A、B级GPS网的边长可视实际情况变通,重要岛、礁与大陆之间的联测,其连接的点数不应少于3个。 6.3.2.11为求定GPS点在某一参考坐标系中坐标,应与该参考坐标系中的原有控制点联测,联测的总点数不得少于3点。 在需要常规测量方法加密控制网的地区,C、D、E级GPS网点应有1~2方向通视。 6.3.2.12为求得GPS网点的正常高,应根据需要适当进行高程联测。AA、A级网应逐点联测高程,B级网至少每隔2~3点,B级网每隔3~6点联测一个高程点,D级与E级网可依具体境况确定联测高程的点数。 6.3.2.13AA、A级GPS点的高程联测,应按GB 12897二等水准的方 . . 法进行,B级GPS点的高程联测,应按GB 12898三等水准或与其精度相当的方法进行,C、D、E级GPS点的高程联测,应按GB 12898四等水准或与其精度相当的方法进行高程联测。 6.3.2.14GPS快速静态定位网的布设,除应满足上述有关规定外,还应满足下列要求: a)相邻地区两个观测单元之间的流动站的重合点数:C、D级不应少于2点,E级不应少于1点; b)相邻点的距离大于20km时,应采用GPS静态定位法施测; c)当网中相邻点间距离小于该级别所要求的相邻点间最小距离时,两相邻点必须直接进行同步观测; d)对于双参考站作业方式,不同观测单元的基准基线宜相互联结,以构成整个网的骨架。 e)D、E级GPS网可采用单参考站作业方式,对相邻观测单元的一些流动测站点必须进行二次设站观测。 6.4技术设计后应上交的资料: a)野外踏勘技术总结; b)测量任务书与专业设计书(附技术设计图)。 编辑本段选点 7.1选点准备 7.1.1选点人员在实地选点前,应收集有关布网任务与测区的资料,包括测区1:50000或更大比列尺地形图,已有各类控制点、卫星跟踪站的资料等。