步进电机选型的计算示例
步进电机选型自动计算

步进电机选型自动计算步进电机是一种将电脉冲信号转换为机械转动的电机,广泛应用于各种自动化设备中。
选用适合的步进电机对于设备的正常运行至关重要,因此在进行步进电机选型时需要考虑多个因素,并进行自动计算以达到最佳的选择。
在选型过程中,需要考虑以下几个主要因素:1.动态特性:步进电机的动态特性决定了其响应速度和精度。
通过计算步进电机的转速、加速度和定位精度等参数来确定其动态特性。
2.负载特性:需要了解所需驱动的负载特性,如负载惯性、负载转矩等,以确定选择的步进电机是否能够满足负载的要求。
3.环境条件:步进电机的工作环境条件对其选择也有一定影响,例如工作温度、湿度、防护等级等。
需要根据实际环境条件选择合适的步进电机。
4.驱动方式:根据实际应用需求选择恰当的驱动方式,常见的驱动方式有全步进和半步进。
全步进具有更高的转矩,但定位精度相对较低;半步进转矩较小,但定位精度较高。
需要根据实际需求选择合适的驱动方式。
5.参数计算:可以通过计算一些关键参数来确定步进电机的规格,例如转速、转矩、加速度等。
根据具体的使用要求可以选择合适的步进电机。
在进行步进电机选型的计算过程中,可以通过以下步骤进行:第一步:确定负载要求根据实际应用需求确定负载的转矩和速度要求,并结合机械结构计算负载惯性。
第二步:计算转矩根据负载转矩和传动系数,计算步进电机所需输出转矩。
同时考虑保险系数,以确保步进电机真正能够满足负载要求。
第三步:计算加速度根据实际应用的速度要求和负载惯性,计算步进电机所需的加速度。
第四步:选择驱动方式和分辨率根据步进电机的使用要求和自动化系统的需求,选择合适的驱动方式和分辨率。
第五步:选择步进电机规格根据以上计算结果,选择合适的步进电机规格,包括步距角、减速比、电流等。
第六步:验证选型结果通过仿真或实际测试验证选型结果的合理性。
如果需要,可以进行多次迭代,调整参数和选型结果,直到满足要求。
总结起来,步进电机选型的自动计算过程可以分为负载要求确定、转矩和加速度计算、驱动方式和分辨率选择、步进电机规格选择以及选型结果验证等步骤。
伺服电机步进电机选型中转动惯量计算折算公式
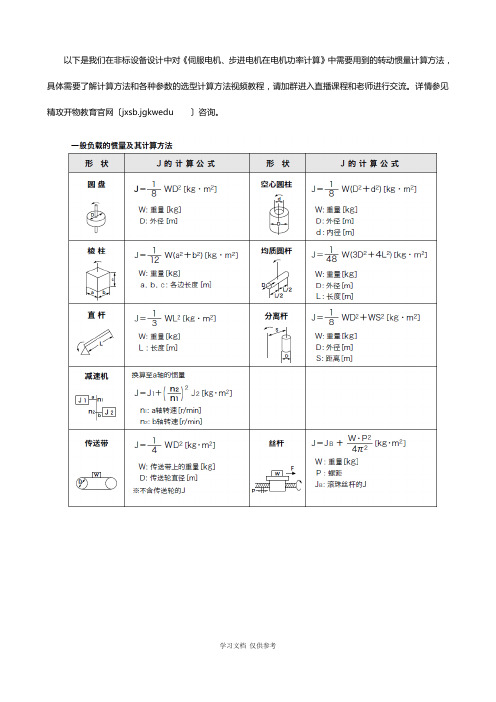
以下是我们在非标设备设计中对《伺服电机、步进电机在电机功率计算》中需要用到的转动惯量计算方法,具体需要了解计算方法和各种参数的选型计算方法视频教程,请加群进入直播课程和老师进行交流。
详情参见精攻开物教育官网〔jxsb.jgkwedu 〕咨询。
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD Jπ)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm);L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:DML2iJsJ =(kgf ·cm ·s 2) J s –丝杠转动惯量(kgf ·cm ·s 2);i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量g w22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf ·cm ·s 2)v -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J i J J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·cm ·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·cm·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
伺服电机步进电机选型中转动惯量计算折算公式

以下是我们在非标设备设计中对《伺服电机、步进电机在电机功率计算》中需要用到的转动惯量计算方法,具体需要了解计算方法和各种参数的选型计算方法视频教程,请加群进入直播课程和老师进行交流。
详情参见精攻开物教育官网(jxsb.jgkwedu.)咨询。
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD Jπ)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm);L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:2iJsJ =(kgf ·cm ·s 2)–丝杠转动惯量(kgf ·cm ·s 2);DMLi-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量gw22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf ·cm ·s 2)v -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J i J J S tJ 1-齿轮z 1及其轴的转动惯量;J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s-丝杠转动惯量(kgf ·cm ·s 2);s-丝杠螺距,(cm);w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·cm ·s 2)R-齿轮分度圆半径(cm);w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·cm ·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
步进电机选型步骤X(精)

步进电机选型步骤
1垂直提升物体时:
-D 24 + (m D 负载惯量: JL (kg.cm2= (π/32ρL (D14
12 /4
负载力矩 : TL (N.m= (WD1/2×10-2
m ---质量 (kg
W---重量(N
ρ---滚轮材料比重 (kg/cm3
-3(kg/cm 3
-3(kg/cm 3 铝合金ρ=2.69×10
钢铁ρ=7.86×10
(转换:1kgf=9.8N
2水平移动物体时:
负载惯量 : JL (kg.cm2= J1+ (Z1/Z2 2 {J2+J3+m (P/2π 2}负载力矩 : T L
-2
(N.m= (Z1/Z2 {[μ(W+f P]/(2πη}×10
m --质量 (kg; W--重量(N --杆固定力 (N
2
-惯量(kgcm 2;Z
2
-齿数 1
-惯量(kgcm 2;Z
1
-齿数
导杆
J
3
-惯量(kgcm 2;P-螺距(cm
3 脉冲频率 f =(N/60?(360/θ
S
θS--步距角(度 N--转速(rpm
10-2+TL 4 驱动力矩 T =Ta+TL=(JM+JL(π/180θS[(f0
-f1/t]×
T--驱动力矩
Ta--加速力矩
J M --电机转子惯量
J L --负载惯量
T
f1f0
注意:选型时还要看 1/启动点 A 是否在启动矩频曲线以下,2/工作点 B 是否在运转矩频曲线以下.
如果能同时满足以上两点,该电机可用.。
步进电机(计算) PPT

3.某数控机床的进给伺服系统中,已知齿轮分度圆直径 d1=64mm,d2=80mm,齿轮宽度B=20mm,丝杠直径 d3=40mm,长度l=1500mm,工作台质量m=150kg。在某一 时刻,齿轮转速n1=500r/min,n2=400r/min,工作台移动速 度v=2m/min,试求此系统转换到电动机轴上的等效转动惯量。
初选步进电机型号,根据其工作方式,初定步距角 i=Z1/Z2= t / 360 θ: 步进电机步距角, (o)/脉冲 t : 滚珠丝杆导程,mm δ: 脉冲当量,mm/脉冲
上一页下一页
2)步进电机选择步骤
② 计算惯量 设传动系统如右图所示:
伺服系统总惯量JG为 JG=Jm+Jleq
式中:Jm ——步进电机转子转动惯量 Jleq —— 换算到电机轴上的等效负载转动惯量
上一页 下一页
4.步进电机的选择
1)步进电机选择原则:
① 步矩角与机械系统相匹配,以得到系统所需的
= t/360 i
② 保证电机输出转矩,大于负载所需转矩
③ 能与机械系统的负载惯量相匹配 为使电机具有良好的起动性能及较快的响应速度
推荐 Jleq/Jm<=4 式中 Jleq为系统等效负载转动惯量
解:脉冲当量
δ 丝 杠 导 程步 距 角 θ传 动 比 i = 360o
δ 3 6 0 o 0 .0 0 53 6 0
3
i=
=
= 0 .6=
导 程 θ 40 .7 5
5
所以,减速器传动比为 3:5。
返回
2、如图示,一台五相十拍运行的步进电动机,通过一对减 速齿轮,滚珠丝杠副带动工作台移动。齿轮1的齿数选定为 Z1=27,步进电动机转子转子齿数Zr=48,并设定步进电动 机每走一步,工作台移动5μm。当丝杠导程t=4mm,时, 试求齿轮2的齿数Z2。
旋转工作台步进电机选型算法流程

旋转工作台步进电机选型算法流程典型数据:第一组:转台最大转速nmax=9转/秒转台半径R0=100毫米转台质量Mass=1公斤转台定位精度Error=0.4度工件处半径R=90毫米工件个数n=2个工件质量M=0.1公斤转台外部阻力矩Tr=0.1牛顿米计算结果:转速较高,不能采用减速器。
步进电机转速=540 rpm电机力矩= 7.78 Nm雷赛步进电机型号:86HS85雷赛驱动器型号:M880,MD882,ME872 雷赛电源型号:PS806第二组:转台最大转速nmax=1转/秒转台半径R0=200毫米转台质量Mass=10公斤转台定位精度Error=0.2度工件处半径R=180毫米工件个数n = 4个工件质量M = 0.5公斤转台外部阻力矩Tr = 10牛顿米计算结果:采用1级同步带减速即可。
减速比 i = 8.3电机转速 = 500 rpm电机力矩= 7.62 Nm雷赛步进电机型号:86HS85雷赛驱动器型号:M880,MD882,ME872 雷赛电源型号:PS806第三组:转台最大转速nmax=0.1转/秒转台半径R0=200毫米转台质量Mass=10公斤转台定位精度Error=0.2度工件处半径R=180毫米工件个数n = 4个工件质量M = 0.5公斤转台外部阻力矩Tr = 10牛顿米计算结果:请采用2级同步带减速。
减速比 i = 83.3电机转速 = 500 rpm电机力矩= 0.4 Nm雷赛步进电机型号:57HS06雷赛驱动器型号:M535,MD556,ME432 雷赛电源型号:PS405,SPS487第四组:转台最大转速nmax=0.5转/秒转台半径R0=500毫米转台质量Mass=30公斤转台定位精度Error=0.02度工件处半径R=480毫米工件个数n = 4个工件质量M = 3公斤转台外部阻力矩Tr = 20牛顿米计算结果:选用齿轮减速器,减速比 i =20 电机转速 = 600 rpm电机力矩= 31.28 Nm雷赛步进电机型号:130HS45雷赛驱动器型号:MD2278雷赛电源型号:200V变压器第五组:转台最大转速nmax=0.005转/秒转台半径R0=500毫米转台质量Mass=30公斤转台定位精度Error=0.02度工件处半径R=480毫米工件个数n = 4个工件质量M = 3公斤转台外部阻力矩Tr = 20牛顿米计算结果:选用齿轮减速器,减速比 i =1000 电机转速 = 300 rpm电机力矩= 0.09 Nm雷赛步进电机型号:42HS02雷赛驱动器型号:M415B,ME432雷赛电源型号:PS405,SPS407。
步进电机选型设计计算综述
电机的分类永磁式(PM ,Permanent Magnent ):永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好,输出力矩大,体积小。
一般为两相,步距角为7.5°或15°.反应式(VR ,Variable Relucance):定子上有多相励磁绕组,转子由软磁材料制成,利用磁导的变化产生转矩。
特点是结构简单,成本低,一般为三相,步距角小,一般为1.5°。
但动态性能差,噪声和振动大,发热大,效率差,可靠性难保证,但输出转矩大。
混合式(HB ,HS ,Hybrid stepping ):混合了反应式和永磁式的优点,其定子上有多相绕组,转子上采用永磁材料。
转子和定子上均有多个小齿以提高步距精度。
其特点是输出力矩大、动态性能好,步矩角小,但结构复杂,成本相对较高。
一般为两相和五相。
目前,最受欢迎的是两相混合式步进电机,约占97%以上的市场份额。
其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本(固定)步距角为1.8°,配上半步驱动器后,步距角可达到0.9°。
配上细分驱动器后其步距角可细分达到256倍,0.007°。
由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
相数电机的相数是指电机内部的线圈组数。
产生不同对极N 、S 磁场的激磁线圈对数。
目前常用的有二相、三相、四相、五相步进电机。
N 相步进电机有N 个绕组,这N 个绕组要均匀地镶嵌在定子上,因此定子的磁极数必定是相数N 的整数倍。
N一般二相电机的步距角为0.9°/1.8°,三相的为0.75°/1.5°五相的为0.36°0.72°。
在没有细分驱动时,主要靠选择不同的相数的步进电机来满足自己步距角的要示。
如果使用细分驱动器,则相数变得没有意义,只要在驱动器上改变细分数,就可以改进步驱角。
步进电机的选择计算
步进电机的选择计算
摘要: 选择步进电机时,首先要保证步进电机的输出功率大于负载所需
的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机
的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过
程中,各种频率下的负载力矩必 ...
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特
性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各
种频率下的负载力矩必须在矩频特性曲线的范围内。 一般地说最大静力矩
Mjmax 大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到系统所需的
脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝
杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分
辨率,不改变其精度。精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频
率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连
续工作频率能满足机床快速移动的需要。
依据电机在一定驱动速度的条件下,其所带的负载转矩、负载惯量(转动
惯量)和必需的加速转矩,来计算所选择步进电机的输出转矩。
步进电机选型计算
1.步进电机的最大速度为600-1200 rpm。交流伺服电机的额定速度通常为3000 rpm,最
大速度为5000 rpm。机械传动系统应根据该参数进行设计。
2.选择电机定位精度。确定机械传动比后,可以根据控制系统的定位精度选择步进电机
的步进角和驱动器的细分水平。通常,所选电动机的步距角等于系统定位精度的1/2或更小。
注意:细分级别大于1/4时,不能保证步距角的精度。伺服编码器的分辨率选择:分辨率比
定位精度高一个数量级。
3.电机转矩选择步进电机的动态转矩很难确定,我们通常首先确定电机的静态转矩。静
态转矩的选择基于电动机的工作负荷,可分为惯性负荷和摩擦负荷。直接启动(通常从低速
启动)时,应考虑两个负载。在加速起动时应主要考虑惯性载荷,而在恒速运行中应考虑摩
擦载荷。通常,静力矩应为摩擦载荷的2-3倍。一旦选择了静态转矩,就可以确定电动机的
机架和长度(几何尺寸)。单位:kgm2
当负载质量转换成电机输出轴上的惯性矩时,常见的传动机构和公式如下:
步进电机选择的计算方法
加速度计算
为了精确定位控制系统,对象必须具有加速和减速过程,如右图所示。
给定加速时间和最大速度Vmax,可以获得电动机的角加速度
步进电机选择的计算方法
步进电机选择的计算方法
电机转矩计算
扭矩计算公式如下:
哪里?
H是驱动系统的效率。外力转换成系统TL;
步进电机计算与选型
第1章 步进电机计算与选型步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
我司主要机械设计中运动部件的动力源主要是步进电机。
因此着重介绍步进电机的计算与选型。
1.1 步进电机基本术语保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
保持转矩越大则电机带负载能力越强。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机重要的参数之一。
比如,当人们说2N.m 的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电机。
步进电机的细分技术实质上是一种电子阻尼技术(请参考有关文献),其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。
比如对于步进角为1.8度的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45度,电机的精度能否达到或接近0.45度,还取决于细分驱动器的细分电流控制精度等其它因素。
不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
运行矩频特性是电机在某种测试条件下测得运行中输出力矩与频率关系的曲线 。
实用公式:转速(r/s )=脉冲频率 /(电机每转整步数*细分数)mP s r V e ⨯=360)/(θ V :电机转速(R/S );P :脉冲频率(Hz );θe :电机固有步距角;m :细分数(整步为1,半步为21.2 电机计算与选型方法选择电机一般应遵循以下步骤:1. 电机最大速度选择步进电机最大速度一般在600~1200 rpm 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机选型的计算示例
步进电机是一种将电脉冲转化为机械角度的装置,广泛应用于工业自
动化领域。
选型步进电机时,需要考虑以下几个方面的因素:
1.载荷特性:首先需要确定所需驱动的载荷特性,包括转动惯量、负
载扭矩和转速等。
这些参数会决定步进电机的尺寸大小、型号和驱动电流等。
2.加速度和减速度:根据需要的加速度和减速度来选择步进电机。
通
常情况下,较大的转动惯量需要更大的电机和更高的驱动电流,以实现较
快的加速和减速。
3.驱动方式:根据具体应用的要求来选择驱动方式,主要有全步进驱
动和微步进驱动两种。
全步进驱动具有较大的转动角度,而微步进驱动可
以实现更精细的位置调整。
4.电磁噪声:步进电机在工作时会产生电磁噪声,需要考虑噪声水平
是否符合所需应用的要求。
下面以一个实际应用的计算示例来说明步进电机的选型过程。
假设需要选型的应用为驱动一个转动惯量为0.5 kg·m²的载荷,要
求达到最大转速为300 RPM,加速度为5000 RPM/s,减速度为8000
RPM/s。
根据这些参数,我们可以按照以下步骤进行步进电机的选型计算:
1. 确定负载扭矩:载荷的转动惯量可以根据实际情况或者相关设计
手册得到。
假设转动惯量为0.5 kg·m²,可根据公式T=Jα 计算所需的
平均扭矩。
其中,T为负载扭矩,J为转动惯量,α为加速度。
根据给定
的加速度为5000 RPM/s,可得到平均扭矩
T=Jα=0.5kg·m²×5000RPM/s=2500 N·m。
2.确定最大扭矩:最大扭矩一般是平均扭矩的2-3倍,以确保电机在加速和减速时能够提供足够的动力。
假设最大扭矩为平均扭矩的2倍,即最大扭矩为5000N·m。
3.确定转速范围:根据要求的最大转速为300RPM,可以根据实际情况选择合适的步进电机型号。
一般来说,步进电机的最大转速会在数据手册中给出。
4.确定驱动电流:驱动电流的大小与所需的扭矩和转速有关。
可以根据公式I=3T/2N计算所需的平均驱动电流。
其中,I为驱动电流,T为平均扭矩,N为步进电机的转速。
假设步进电机的最大转速为3000RPM,可得到平均驱动电流I=3T/2N=3×2500N·m/2×3000RPM=2.5A。
5.根据以上计算结果,可以查找步进电机的数据手册,选择合适的型号。
手册中会给出电机的技术规格和性能参数,如外形尺寸、额定电流、步距角等。
需要注意的是,以上计算仅提供一个初步选型的参考,实际选型还需要考虑其他因素,如成本、可靠性、噪声等。
具体的选型过程还需根据实际应用的需求和限制来进行。