基于GPS的数据采集处理系统设计
智能货物追踪管理系统的设计与实现

智能货物追踪管理系统的设计与实现在现代物流产业中,货物追踪管理是一项非常重要的任务。
不仅可以提高货物配送效率,减少货损和破损,还可以优化物流成本、提升用户满意度等。
而随着信息技术的迅速发展,智能货物追踪管理系统(以下简称智能货追系统)也逐渐受到广泛关注。
本文旨在探讨智能货追系统的设计与实现。
一、系统需求分析在设计智能货追系统之前,需要详细分析系统的需求。
针对不同的需求,我们可以将智能货追系统的功能分为以下几个方面:1. 货物追踪与监控:系统需要能够实时追踪货物的位置、状态等信息,可采用GPS定位等技术实现。
2. 数据管理与统计分析:系统需要能够对所追踪到的货物信息进行管理、分析和统计,以便制定相关的物流策略。
3. 预警与异常处理:系统应具备预警机制,能够及时发现和处理货物出现的异常情况,预警内容可以包括货物损坏、交通拥堵等等。
4. 环节协调与优化:系统需要能够协调和优化各个环节之间的关系,包括运输、配送、收货等多个环节,以提高物流效率。
二、系统模块设计在确定系统需求后,我们可以进一步将整个系统拆分成多个模块,便于更好地实现和管理。
以下是四个核心模块的详细介绍:1. 货物追踪与监控模块:该模块主要负责货物的实时定位和状态监控,实现数据采集和监控数据分析。
可以结合GPS、RFID等技术实现。
2. 数据管理与统计分析模块:该模块主要负责货物和车辆的信息管理,记录各个环节的数据并提供统计分析报告。
可以采用数据仓库等技术进行管理和分析。
3. 预警与异常处理模块:该模块用于处理货物运输过程中出现的异常情况,如异常停车、脱离路线等,以及货物损坏、被盗等情况的预警。
4. 环节协调与优化模块:该模块主要用于协调和优化物流过程,如针对拥堵路线的智能调度、优化配送路径、快速响应用户需求等。
三、系统实现与运作流程在系统设计完成后,需要实现和部署。
系统实现需要根据模块进行具体的开发实现,如定位技术、数据管理技术、预警技术等。
NMEA-0183GPS定位信息显示系统方案设计

中文摘要GPS定位系统在人们的日常生活中已被广泛使用,已然成为人们生活中的重要组成部分。
因其具有定位精度高、价格低廉、适用性强等特点,在许多领域都占有主导地位。
本次设计将介绍一种简易GPS卫星定位显示系统,GPS模块采用ublox 公司旗下的NEO-6M模块,同时主控MCU采用51单片机STC89C52,显示屏幕采用常见的LCD-12864液晶屏,通过对单片机串口接收到的GPS数据包进行解析并显示在12864液晶上,实现实时地理位置信息的采集与显示。
同时采用电池供电以实现体积小巧、携带方便。
关键词:GPS定位;STC89C52 NEO-6M;LCD-12864;第一章绪论1.1 课题背景及意义GPS全球卫星导航系统在军事,商用,民用上都具有广阔的领域,现在应用GPS 的产品已经随处可见,比如常见的汽车导航仪,GPS测距测亩仪,GPS定位追踪搜救系统等等,虽然这些功能都比较强大,但差不多都是应用在特定的领域,结合其他的功能模块一起设计使用的,而且仪器价格高,而且对于需要简单定位功能来说没有必要那么复杂。
所以在这种情况下,本次设计的定位显示系统满基本的GPS的定位系统的需求。
1.2 课题研究的目标和任务本次设计的主要任务是通过单片机与GPS模块进行通信,解析出NEMA-0183语句并提取需要的经纬度、时间日期在12864液晶上进行显示。
在此次设计过程中,主要熟悉所选用的GPS接收模块的性能指标,接收并解析它所输出的数据包,用C语言编写相关单片机控制和解析程序,并在液晶显示器成功的显示相关的信息。
第二章 GPS定位信息显示系统方案设计2.1 全球GPS卫星导航系统系统简介GPS卫星到现在为止已经设计了三代,第一代为实验卫星,一共发射了11颗卫星,设计的寿命是5年,现在已经停止工作了。
第二代称之为工作卫星,一共发射了28颗,寿命是7.5年,从1989年开始发射到1994年上半年发射完成。
第三代卫星尚在设计中计划20颗,用来取代第二代提高并改善卫星定位系统。
VBOX汽车整车性能测试系统
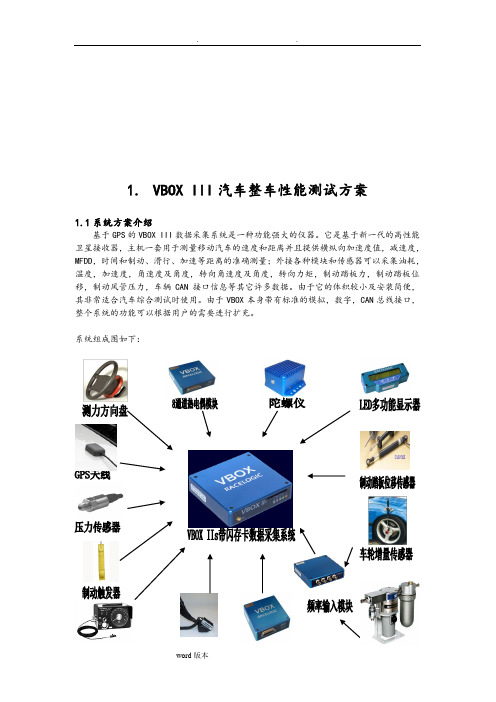
1.VBOX III汽车整车性能测试方案1.1 系统方案介绍基于GPS的VBOX III数据采集系统是一种功能强大的仪器。
它是基于新一代的高性能卫星接收器,主机一套用于测量移动汽车的速度和距离并且提供横纵向加速度值,减速度,MFDD,时间和制动、滑行、加速等距离的准确测量;外接各种模块和传感器可以采集油耗,温度,加速度,角速度及角度,转向角速度及角度,转向力矩,制动踏板力,制动踏板位移,制动风管压力,车辆CAN接口信息等其它许多数据。
由于它的体积较小及安装简便,其非常适合汽车综合测试时使用。
由于VBOX本身带有标准的模拟,数字,CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。
系统组成图如下:以上第二——十九项为可选项1.3特点:•全套测量系统体积极小,安装简便迅速•能完成国家标准要求的汽车动力性,经济性,操纵稳定性,制动性能等实验•在线显示4个测量参数•各种测量或采集到的参数可以实时显示•可根据要求设定各种不同的试验条件进行试验•制动触发形式多样,使试验更加方便•WINDOWS操作界面的设定和分析软件,使用方便•高精度、高可靠性,高耐振、抗冲击性能确保测试质量•用GPS非接触式速度和距离测量•现场即时打印功能,打印各个测量或采集到的参数,实现现场数据阅读•大容量紧凑式闪存卡(CF卡)即时存储数据,以便后处理•可扩展连接其他各种传感器•绘制轨迹图,圈数定时1.4 可进行的试验:•滑行试验•油耗试验•爬陡坡试验•最高车速试验•加速性能试验•制动性能试验•操纵稳定性试验•最小稳定车速试验•最小转弯直径测量实验•制动踏板力测量实验•制动踏板行程测量实验•制动管路压力测量实验•汽车防抱制动系统性能实验•温度测量实验•里程,速度表校验等其它试验1.5 可满足的国家标准:GB/T 12545 - 1990 汽车燃料消耗量GB/T 12547 - 1990 最低稳定车速GB/T 12536 - 1990 汽车滑行试验GB/T 12543 - 1990 汽车加速性能GB/T 12539 - 1990 汽车爬坡性能GB/T 12544 - 1990 汽车最高车速GB/T 12676 - 1999 汽车制动系统性能GB/T 6323 - 94 汽车操纵稳定性试验方法GB/T 12540 - 90 汽车最小转弯直径测定方法GB/T 13594 - 92 汽车防抱制动系统性能要求和试验方法1.6 应用实例图片:VBOX II在测试世界(芬兰)的应用:2. 关于Racelogic 公司VBOX产品概述GPS 技术在1995年就已经面世但是知道最近才足够精确用于车辆测试(见GPS的概述)。
基于GPS、GIS、GSM技术的监控系统的设计和实现

随着计算机科学技术 的发展 , 位置” “ 信息 的 需求变得更加重 要 (0 , P ( 8 %) G S 全球 卫星定位系
统)GS 电子地理信息系统) G M 全球数字移动 、I ( 、S ( 系统 ) 技术之间的联系越来越紧密 , 这种“G 技术 3”
显示系统等。它既可以方便地安装于车辆 、 船舶等 移动 目标之上, 也可 以安装到重要的 固定点上( 如
14系统 工作原 理 .
测、 紧急报警服务等诸多领域 , 并显示 出巨大的技
术、 经济 、 社会效益。随着应用的深入 和集成技术
将任何装有监控终端的监控 目标的动态位置(
的发展 , 它将更大地影响到人们的生活。
精度 、 纬度、 高度)时间、 、 状态等信息和温度 、 流量 、 压力等环境信息 , 实时地通过 G M移动通信网络 S 传至监控中心 , 而后在具有强大地理信 息处理 、 查
我们基于短信 文本传输 协议开 发。传感 器信 息、
CS , 信息都基 于此协议并通过 G M模块发送到监 P S 控 中心 。 该 O M板 的数据通信接 口为通用 的 R 22 E S3 , 非常方便嵌入式终端 的前期开发。可使用 A T命 模块及接 1电路 、 : 3 显示 及键盘模块 、 多种传感
端、 监控 中心 软件 的设 计和实现 。 关键词 :G S GS S 监控 系统 P I G M 中图分类号 :P 7 T 23
Dein a d I lme tt n o u e vs n a d Co to ytm s d o S, S, M s n mp e n a o fS p r ii n n rlS se Ba e n GP GI GS g i o
维普资讯
第3 4卷(o6 第 2期 2o )
港口高精度GPS应用系统-PDS
YARDMAP开发工具
Smart Yardmap Developing Tools(SYDT)工具软件是为了更好更快 地生成Yardmap而专门开发的,它是基于本公司自主知识产权的地理 信息系统(GIS)平台开发而成。 它具有以下特点: 图形显示界面,可任意放大缩小显示界面。任何对Yardmap的修改都 可通过图形化的方式立即显现出来。 为Yardmap的场地测量、数据库文件生成、修改、维护度身订制 提供交错检查工具,对每个Block,Stack,Lane的平行性以及交错进 行检查,保证每个集装箱的位置不会有重叠部分。 升级换代方便。可充分利用原有的数据。 维护方便,成本低。由于大部分工作由软件完成,用户只需提供有限 的信息就可由软件自动完成剩余的工作,成本低廉。 减少场地测量的成本。本软件在设计中充分考虑场地特点,用最少 的测点来生成YARDMAP ,从而减少测点数量,节省测量时间和费用
系统结构图
工作过程
在没有安装AGSS系统的轮胎吊上,司机操 作时需要时刻注意黄色基准线,以免轮胎 吊偏离轨道而撞车或撞箱。由于轮胎吊高 20多米,且场地上堆满集装箱,司机驾驶 室下还有吊具,因此司机精神必须高度集 中,稍不留神,就会发生事故。 安装AGSS后,系统会根据基准线,通过 高精度GPS数据和编码器数据,自动计算实 际运行轨迹与基线的偏移量,并将偏差数 据发给到PLC控制轮胎吊的变频电机进行纠 偏。为了确保系统的安全性,AGSS系统在 保证自动纠偏的同时也可以进行手动纠 偏,且轮胎吊偏离基准线超过警戒值时通 过声音和指示灯提醒司机注意。
图2-2-1监控中心站系统构成
如图2-2-1所示,电台资料通 过专网RDS将GPS数据传回道监控 中心,软件系统能以YARD MAP为 数字地图基础,在地理信息系统 平台GIS上显示出来。同时,监 控中心也可将调度系统通过RDS 将系统传送给车载终端。 调度中心系统以GIS为应用软件 平台,在此平台上建立车辆定位 管理、通信管理、调度管理三个 软件模块。 车辆定位管理模块以YARDMAP为 背景,显示车辆位置、运行轨 迹、事件报告等信息。 系统的信息数据流如图2-2-2 所示:
GPS单点定位算法及实现
GPS单点定位算法及实现GPS单点定位算法是通过接收来自卫星的信号,通过计算接收信号到达时间差以及接收信号强度等信息,确定自身的位置坐标。
常见的GPS单点定位算法包括最小二乘法定位算法、加权最小二乘法定位算法、无拓扑算法等。
最小二乘法定位算法是一种基本的GPS定位算法,通过最小化测量误差的平方和,求得位置坐标最优解。
该算法假设接收器没有任何误差,并且卫星几何结构是已知的。
具体实现步骤如下:1.收集卫星信息:获取可见卫星的位置和信号强度信息。
2.数据预处理:对接收信号进行滤波和数据处理,例如去除离群点、噪声滤除等。
3.卫星定位计算:根据接收器和可见卫星之间的距离和相对几何关系,计算每颗卫星与接收器之间的距离。
4.平面定位计算:根据卫星位置和距离信息,使用最小二乘法求取接收器的经度和纬度。
5.高度定位计算:根据卫星位置和距离信息,使用最小二乘法或其他方法求取接收器的高度。
加权最小二乘法定位算法在最小二乘法定位算法的基础上加入对测量数据的加权处理,以提高定位精度。
加权最小二乘法定位算法的实现步骤与最小二乘法定位算法类似,只是在卫星定位计算和平面定位计算中,对每个测量值进行加权处理。
无拓扑算法是一种基于统计的定位算法,不需要事先知道接收器和卫星的几何关系,而是通过分析多个卫星的信息来确定接收器的位置。
其实现步骤如下:1.收集卫星信息:获取可见卫星的位置和信号强度信息。
2.数据预处理:对接收信号进行滤波和数据处理,例如去除离群点、噪声滤除等。
3.卫星选择:选择可见卫星中信号强度最强的几颗卫星。
4.定位计算:根据已选择的卫星信息,使用统计模型或其他算法计算接收器的位置。
1.数据采集与处理:获取和处理接收信号、卫星信息和测量数据,对数据进行有效的滤波和预处理。
2.算法选择与优化:根据定位精度和计算效率的要求,选择合适的算法,并进行算法优化和参数调整。
3.数据处理与结果可视化:对定位结果进行处理和分析,可通过地图等方式可视化结果,以便用户更直观地了解定位情况。
基于PDA和GPS实时坐标转换系统的设计与实现
Absr c :I r e o me tt e n e s o h ie—d vn n t e s a wi t a t n o d r t e h e d f te p l i r i g O h e t GPS, £e r l t e h } eai l v
一
的检查 。如果精度不够 , 造成返工, 给测量工作带 来 不便 。 对 此 , 用 H 29 C型 P A 作 为 测 量 数 据 选 P40 D 的实时 自动记 录 和处 理 的平 台 , 用 C N T开发 采 #E 了基 于 P A的数据 采集 和转 换参 数 计算 系统 , D 实
P A o tw r f e lt o r i a et n fr t n h sb e e eo e .T i p p rit d c s D s f a eo a i c o d n t a somai a e n d v lp d hs a e r u e r me r o n o h a i r cp e o e lt t e b sc p n i l ft e r a i o r i ae t n fr ai n s se b s d o DA a d G S i h me c d n t r s m t y tm a e n P n P . a o o
基于PC104的GPS数据接收的软件实现
P C 1 0 4是嵌入式 P C的一种机械 电气标准, 为嵌入式应用 提供了标准 的系统平台, 为设计应用系统的工程师提供 了功能 强大、 可靠性高 、 接 口标准 、 使用方便 的系统组件 。 G P S在移动 目标的 自动导航和控制 中都有所应用 。本文 阐述利用 P C 1 0 4 平 台采 集 G P S数据 , 获取移 动 目标 的位置信息 的实现方法。 通 常情况下 P C1 0 4的软件设计开发环境是基于 DO S操 作系统的, 利用 C语言进行 软件 编程 来实现。 随着主 C P U板、 C F存储卡等性 能的大幅提高 , 根据数据处理对硬件 的要求不 同, 可 以选 择 W I N 2 0 0 0系 统 代 替 一 直 习 惯 用 的 DO S系 统 , 从 而 利用 C # . N E T开发环境下 C # 语言编程实现 , 降低开发难度 , 拓 宽实现路径 。而且大部分参考文献和 网络文章都采用从 串 口一次性读 入NME A 0 1 8 3 数据 , 每一条 N ME A 0 1 8 3 语句都 是 以“ ¥ ” 开始 的, 在处理缓存数据时一般是通过搜寻 A S C H码 ” ¥ ’ t
2 G P S数 据采集
采集 GP S数据地理信息完成定位信息 的获取,实现位置 实 时和事后的精确告知。 通过 G P S接收机接收 G P S原始数据 信 息, 对原始数据进行 处理后存储并转发。 GP S定位信息接 收 系统主要 由 G P S接 收天线 、 变频器 、 信 号通道 、 微处理器 、 存储 器 以及 电源等部分组成 。 利用 R S 一 2 3 2串口将地理位置信 息和 速度信息等从 GP S 接收机传送到 P C 1 0 4计算机 中进行信 息提 取处理 , 再利用 RS 一 4 2 2串口传送至接收设备 的 R S . 4 2 2 端 口。 对G P S 进行信息提取必须首先 明确其帧结构 , 然后才能根 据其结构完成对各定位信息的提取。本文使用 的 G P S接收机 采用 N ME A 0 1 8 3 通信协议, 此协议是为了在不同的G P S 导航设 备 中建立统一的 R T C M 标准( G P S差分协议) 。 N ME A 0 1 8 3 语句 以A S C I I 格式输 出, 传输速率可 自定义, 缺省波特率为 4 . 8 k b p s 。 下面 以采 集 G P S 数据 中经度 和纬 度为例 阐述 说 明对 N ME A0 1 8 3数据 的读取和处理方式 : 2 . 1数 据提 取 的实 现 GP S 接收机作为数据终端设备利用接 口与 P C 1 0 4计算机 通讯 串 口相连 。 通过对通讯 串 口的编程可 实现 GP S信号 的接 收 。GP S 信 号有 二进 制 和 AS C I I两种 。本文 用 后一 种 即 N ME A0 1 8 3格式 。 NME A0 1 8 3 格式 以“ ¥ ” 开始 , 以“ \n ” 结束 , 对 于本 文所 使用 的 G AR MI N1 5 G P S接 收机板 ,其 发送到 P C1 0 4计算机 的数据主要 由帧头 、 帧尾和帧 内数据组成, 根据
智慧城管-无线数据采集系统设计方案
智慧城管无线数据采集系统设计方案XXX有限公司20XX年XX月XX日目录一系统概述 (3)二功能设计 (3)2.1 问题上报 (3)2.2 我的任务 (4)2.3 自行处置 (4)2.4 专项普查 (4)2.5 地图浏览 (4)2.6 案件查询 (4)2.7 轨迹查询 (5)2.8 系统设置 (5)2.9 系统帮助 (6)2.10 打卡下班 (6)一系统概述在无线数据采集系统是为城市管理巡查员对现场信息进行快速采集与传送而研发的专用工具。
城市管理巡查员使用相应功能的信息采集器在所划分的区域内巡查,将城市部件和城市事件的相关信息报送到监督指挥中心,同时接受监督指挥中心和领导的工作派遣与调度。
无线数据采集子系统分为终端应用系统和服务器端应用支撑系统。
终端应用系统实现了对城市部件、事件所发生问题的各种现场信息,通过电话、表单、现场照片、录音和地理信息快速定位等多种采集手段,经无线网络将所采集到的多媒体信息实时传送到受理平台。
服务器端应用支撑系统由无线信息服务系统、数据同步服务系统,地理编码查询系统,数据协同管理和交换系统、安全管理系统等子系统组成。
实现了终端的应用系统和后台的政务信息平台之间的各种数据交换与管理。
二功能设计2.1问题上报主要是巡查员在本功能栏目中将所发现的问题进行详细的描述,根据问题的大类、小类等进行选择,同时将事发位置根据 GPS 定位在地图上进行标识,便于处理部门能够快速准确的到事发地处理。
同时还可以对问题进行拍照和录音,使得问题描述更加准确可信。
①应具有问题上报功能,上报部件或事件类型、部件标识码、位置坐标和图像等信息。
应具有图像压缩功能。
具有上报问题及其所在位置的文字描述、语音信息功能。
②应具有离线操作方式,在网络不正常情况下能暂存上报信息,待网络正常后自动上报。
2.2我的任务任务管理里面主要是监督指挥中心所下发的核实、核查任务,巡查员可以在该部分的功能栏中查看自己所需要处理的问题,以及上报问题的处理状态。
GPS车载导航系统的设计
GPS车载导航系统的设计施文灶;王平【摘要】GPS车载导航系统融合了车辆、交通、计算机、通信、系统科学等领域的相关技术,逐渐成为交通导航的重要工具。
本设计以处理器为S3C6410A的开发板作为开发平台,采用Linux作为嵌入式操作系统,选用GPS模块GR-87采集GPS数据,对GPS车载导航系统的方案进行论证,介绍了GPS数据的获取、电子地图的生成和显示。
以福建师范大学校园为实测环境,实现实时定位、动态路径规划等功能。
%GPS car navigation system which combined relatedifleds such as vehicles, transportation, computer, communication and systems science has gradually become an important tool for trafifc navigation. The design uses development board based on S3C6410A pro-cessor as a development platform, adopts Linux as an embedded operating system, selects GPS module GR-87 to collect GPS data. It dem-onstrated the design program for GPS car navigation system, GPS data acquisition, generation and display of the electronic map. This design uses Fujian Normal University as the measured environment, and achieves the function of real-time positioning and dynamic path planing.【期刊名称】《软件》【年(卷),期】2014(000)004【总页数】5页(P32-36)【关键词】GPS;导航;Linux;电子地图【作者】施文灶;王平【作者单位】福建师范大学光电与信息工程学院,福建福州 350117;福建师范大学光电与信息工程学院,福建福州 350117【正文语种】中文【中图分类】TP24本文著录格式:[1]施文灶,王平. GPS车载导航系统的设计[J].软件,2014,35(4):32-361.1 系统功能目前关于GPS/GIS的研究已成为一个热点主题,并得到迅猛的发展,地图数据公司崛起,导航软件推陈出新,往嵌入式发展的趋势已经很明显[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于GPS的数据采集处理系统设计
作者:马兰, 袁卫
来源:《现代电子技术》2010年第15期
摘要:根据GPS定位系统的试验定位数据多、数据刷新速率快、试验周期长等特点,设计利用TI公司的MSP430低功耗单片机实现自动对GPS定位系统的定位数据进行采集、筛选、存储和计算,并将采集的数据通过串口转USB接口传送至计算机显示,以提高工作效率,并为评定
其定位性能提供依据。
关键词:GPS; 单片机; 计算机; 数据采集
中图分类号:P228.4文献标识码:A
文章编号:1004-373X(2010)15-0171-02
Design of Data Acquisition System Based on GPS
MA Lan1,YUAN Wei2
(1. Beijing Municipal Administration School, Beijing 102600, China; 2. Xidian University, Xi’an 710071, China)
Abstract: According to GPS characteristics of more location data,faster data refresh rate and longer testing period, a circuit that uses MSP430 microcontroller to automatically achieve data acquisition, selection, storage and computation is designed. The collected data is sent to computer through the common serial interface via USB interface. A basis is provided for the assessment of its positioning performance.
Keywords: GPS; MCU; computer; data acquisition
0 引言
GPS(Global Positioning System,全球卫星定位系统)以其高精度、全天候、全天时的特点,在定位、导航、测距、授时遥感等领域广泛应用,并得到了快速的发展[1]。
设计一种基于嵌入式系统的GPS定位数据采集系统,根据GPS信号接收原理和嵌入式技术,该设计完成了基于单片机和计算机实现GPS数据的采集,并以良好的人机界面显示出系统所处的经纬度、海拔高度、X,Y坐标以及日期等信息[2],该系统已应用于某外场的车载定位试验中,代替了以前人工记录定位数据的烦琐,提高了效率。
1 系统描述
本设计利用TI的低功耗MSP430F149单片机的双串行接口,一路将GPS接收模块接收的定位信息数据传送至单片机,由单片机对GPS定位信息中需要的信息进行采集、解析,最后将需要的信息发送至外接的液晶显示其经、纬度、海拔高度和时间;同时将解析的数据经外部的串口转USB接口电路传送至计算机,计算机将接收到的经纬度坐标通过坐标变换转换成本地的高斯平面坐标,并一同将经纬度、海拔高度、高斯平面坐标值等显示给用户,其整体系统框图如图1
所示。
图1 GPS定位系统数据采集处理系统框图
2 GPS数据格式类型及定位信息提取
GPS模块上电后,会每隔一定的时间返回一定格式的数据,其数据格式为:“$信息类
型,x,x,x,x,x,x,x,x,x,x,x,x,x”,每帧的起始字符都是“$”,接着是信息类型,后面是定位参数,以逗号分隔开[3-4]。
一帧完整的数据格式如下所示:
以上帧数据表示的意义:其中信息类型GPRMC表示为推荐最小定位表示当前时间为时分55秒;A表示有效定位;4546.40891表示纬度表示北纬;12639.65641
表示经度;E表示东经表示速率,其单位为节(海里/h);328.42表示航向,指的是偏离正北的角度;170809表示日期等,具体参数见文献[3]。
除了GPRMC信息类型外,还有GPGGA信息类型,它里面包括GPS定位信息,其中海拔参数即在此信息类型内,其他的信息类型可参考文献[5]。
设计中数据信息提取、解析是通过TI公司的低功耗单片机MSP430F149完成,其方法首先通过搜寻ASCII码“$”来判断是否是一帧数据的开始,然后通过接收到的五个字符来判断当前所接收到的信息类型,对帧的信息类型识别正确后,通过搜寻的“,”的个数来确定GPS模块当前所接收到的是哪个定位参数,从中提取出需要的定位信息[6]。
本设计中仅解析GPRMC和GPGGA
的信息中的经、纬度、海拔高度、时间信息等。
3 GPS数据采集处理系统硬件系统设计
3.1 MSP430F149单片机与GPS模块接口电路
MSP430F149单片机是TI公司推出的一款16位的单片机,其具有集成度高、外围设备丰富、超低功耗等优点[7]。
本设计中利用MSP430F149单片机实现将GPS模块中的定位信息通过串行接口采集单片机内完成对定位信息的提取、解析,从中选择需要的信息,这里所需要的信息仅包括经、纬度、海拔高度、时间信息等。
GPS模块采用瑞士u-blox公司的NEO-5Q主芯片,此芯片为多功能独立型GPS模组,以ROM为基础架构,采用u-blox最新的KickStart微弱信号攫取技术,能确保在任何可接收到信号的位置及任何天线尺寸都能够有最佳的初始定位性能,并进行快速定位。
并且其外部有
UART,USB,SPI,I2C等多种接口,可方便地与单片机或ARM等微控制器实现无缝连接,电路简单,其具体电路如图2所示。
图2 单片机与GPS模块硬件电路
3.2 串口转换USB接口电路
利用单片机完成定位信息的采集、解析、选择,获得需要的信息一路经12864液晶显示,另一路信息传送至计算机显示。
为解决现今许多计算机无串口的问题,在设计中利用PL2302芯片实现将USB接口虚拟一个串口,来完成数据信息的传输。
PL2302用于实现USB和标准RS 232串行端口之间的转换,其完全遵从协议,满足速度传输要求,其硬件电路如图3所示。
图3 串口转USB硬件电路
4 GPS数据采集处理系统软件系统设计
该设计的软件系统主要完成接收MSP430F149单片机通过虚拟USB接口传送来的包括经、纬度、海拔高度、时间信息定位参数信息,并在计算机内部完成将经纬度坐标转换成本地的高斯平面坐标。
数据记录处理软件主要完成数据格式的解析、采样速率设定、原始数据及计算结果显示和打包存储为txt文本文件和数据处理等功能。
系统采用标准图形化用户界面以及详细的联机帮助功能,汉化界面,简单直观,操作方便。
各功能模块可根据实际需要进行灵活配置和管理,能够进行多任务操作,实时数据监视、历史数据查询、计算结果显示和打印互不影响。
这些工作均由上位机软件来完成,编程语言采用。
其中采集到的数据分别在
“X”,“Y”,“H”、“经度”和“纬度”显示,“计算结果”显示处理后的数据,此外还有端口选择、采用速率设置及数据计算周期设置,以便使用更加方便、灵活。
运行结果如图4所示。
图4 GPS定位系统试验数据采集系统人机交互界面5 结语
该设计利用TI公司的MSP430F149单片机实现对GPS定位信息的采集、提取。
系统已应用在外场车载定位系统试验中,该系统可在全天候工作,定位精度高,自主定位精度优于10 m,若采用差分定位,精度可达厘米级和毫米级[10],并具有功耗低等优点,满足外场试验要求。
参考文献
[1] 路勇, 熊华钢, 杨东凯,等.多通道GPS原始数据采集系统设计与实现[J].数据采集与处理,2009,24(5):699-702.
[2]陈玲玲,刘凤昆.基于嵌入微处器的GPS定位系统[J].吉林化工学院学报,2009,26(3):43-45.
[3]黄凌.基于单片机的GPS信息处理系统[J].现代电子技术,2007,30(21):60-61.
[4]向前勇,王章瑞,许方华,等.GPS导航数据的提取和坐标转换[J].仪器仪表用
户,2009,16(4):70-71.
[5]李立早.基于MSComm控件的GPS接收机数据终端接口设计[J].现代电子技
术,2006,29(20):97-98.
[6]周建郑.GPS定位原理与技术[M].郑州:黄河水利出版社,2005.
[7]秦龙.MSP430单片机常用模块与综合系统实例精讲[M].北京:电子工业出版社,2007.
[8]龚建伟,熊光明串口通信编程实践[M].北京:电子工业出版社,2007.
[9]侯俊杰.深入浅出MFC[M].2版.武汉:华中科技大学出版社,2001.
[10]袁林,曹杰.利用实现GPS全球定位系统定位数据的提取[J].现代电子技
术,2004,27(24):105-106.。