大变形接触条件下接触方式对收敛的影响-株洲时代新材料科技股份
接触问题及其解决方法
接触问题及其解决方法综述•本技术手册提供了在Marc和Mentat中使用接触经常遇到的问题的解决方法。
•MARC用直接约束法处理接触问题,在整个过程中跟踪运动接触体的轨迹,当发生接触时,使用边界条件直接约束运动体——两者的运动约束转化成了节点自由度的约束和节点力的约束。
如果程序能够预测出什么时候发生约束,这种方法非常准确。
在Marc中通过CONTACT选项执行这个程序。
因为不需要预先知道那里发生接触,所以在本程序中不用提前指定参考单元,可以模拟复杂的接触。
•Marc中接触的详细用法见《程序输入手册》“接触”一章。
•Marc中接触的详细求解过程见《理论手册》(卷A)中的附录。
•下面对接触的用法分别做一下解释:接触分析的设置•在接触分析中最常见的问题怎样解决?下面的介绍可能对你有所帮助:a. 增加LOADCASE中的载荷步数。
b. 确保在JOBS的INITIAL LOADS中包括固定边界条件。
c. 接触分析允许两个或多个接触体之间发生任意大的相对变形。
在一些分析中的变形不可避免地会超出几何线性分析中小变形的设定范围(最大旋转角度的正切值约定于角度本身,使用弧度值)。
如果是这种情况,激活LARGE DISP参数。
d. 线-线之间的接触会出现数值问题,导致收敛困难。
如果他们落入接触区域的容限之内,Marc的接触算法将会设置接触的节点。
容限缺省值设置为定义的所有接触体的最小单元边长的1/20。
在有些情况下,这个值太大了,尤其是线-线接触。
线-线网格不是拓扑相等的,可能一个或另外一个网格上的多数节点落入接触区域容限内,人为设置接触应力。
在接触区域容限设置时推荐使用偏离系数。
而且下降的接触区域容限推荐使用系数5或10。
接触体使用解析选项,接触的线或面使用nurbs曲线或coons曲面,很可能消除这个问题。
一种特殊情况是接触表面上的网格是连续的。
即一个网格上的节点和其他网格上的节点一致。
在这种情况下,因为所有的节点都是一致的,不应该设置人为应力。
ansys收敛问题

1.一般首先是改变初值,尝试不同的初始化,事实上好像初始化很关键,对于收敛~2.Ansys的收敛最基础的是网格的质量,这个靠经验3.首先查找网格问题,如果问题复杂比如与模型、边界、初始条件都有关系。
4.边界条件、网格质量5.有时初始条件和边界条件严重影响收敛性,曾经作过一个计算反反复复,通过修改网格,重新定义初始条件,包括具体的选择的模型,还有老师经常用的方法就是看看哪个因素不收敛,然后寻找和它有关的条件,改变相应参数。
就收敛了6.A.检查是否哪里设定有误.B.从算至发散前几步,看presure分布,看不出来的话,再算几步,看看问题大概出在那个区域,连地方都知道的话,应该不难想出问题所在.C.网格,配合第二点作修正,或是认命点,就重建个更漂亮的,或是更粗略的来除错...D.再找不出来的话,我会换个solver...7.我解决的办法是设几个监测点,比如参数变化较大的地方,若这些地方的参数变化很小,就可以认为是收敛了,尽管此时残值曲线还没有降下来。
8.记得好像调节松弛因子也能影响收敛,不过代价是收敛速度。
9.网格有一定的影响,最主要的还是初始和边界条件载荷步、载荷子步均是对所施加荷载的一种描述方式。
在施加荷载的时候需要对载荷步、载荷子步进行定义。
载荷步仅仅是为了获得解答的载荷配置,它的作用是在给定时间间隔内的一组荷载。
在线性静态或稳态分析中,可以使用不同的载荷步、施加不同的载荷组合。
在瞬态分析中,多个载荷步载荷历程曲线的不同区段来描述荷载随时间的变化情况。
在有一些分析中需要用到载荷子步。
载荷子步是正在求解的载荷步中的时间点,是对载荷步描述的进一步细化。
在所有的静态和瞬态分析中,ANSYS通过指定分析中载荷步结束的时间来定义载荷步。
这样,在瞬态分析或其他有关速率的静态分析中,时间具有实际意义;在于速率无关的分析中,时间是作为识别载荷步以及载荷子步的“计数器”来跟踪载荷步,并无实际意义。
时间步则一般在非线性问题或瞬态动力学问题求解中使用,是每一次迭代求解的步长,设置过大则容易不收敛。
ANSYS_高级接触问题
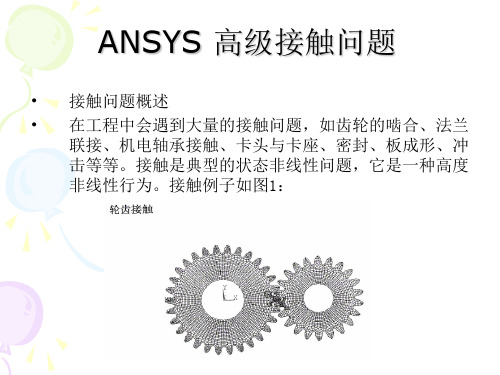
图3-3
• 例:Seal.dat (图3-3) • Step 5. 建立接触面单元 • 设置接触单元属性、选择可变形体表面节点,并在可 变形体上建立接触单元(过程与在可变形体上建立目标单 元相同) Main Menu > Preprocessor > Modeling > Create > Elements > Surf/Contact > Surf to Surf (ESURF) • 这些接触单元与基体有同样的阶数(低阶或高阶)。 • 注意,在壳或梁单元上建立目标单元或接触单元时, 可以选择要在梁或壳单元的顶层还是底层建立单元。
· 接触分析中自动时间步的其它注意事项:
• 与所有其它非线性分析一样,对接触问题,时间步长是非 常有力的提高收敛性的工具。 • 采用足够小的时间步长以获得收敛。 • 对于冲击瞬态分析,必须使用足够数量的计算步以描 述表面间的动量转移。 • 对于路径相关现象(如接触摩擦),相对较小的最大 时间步长对计算精度是必须的。
ANSYS 高级接触问题
• • 接触问题概述 在工程中会遇到大量的接触问题,如齿轮的啮合、法兰 联接、机电轴承接触、卡头与卡座、密封、板成形、冲 击等等。接触是典型的状态非线性问题,它是一种高度 非线性行为。接触例子如图1:
ANSYS 高级接触问题
• 分析中常常需要确定两个或多个相互接触物体的 位移、接触区域的大小和接触面上的应力分布。 • 接触分析存在两大难点: • 在求解之前,你不知道接触区域的范围;表面之 间是接触还是分开是未知的;表面之间突然接触 或突然不接触会导致系统刚度的突然变化。 • 大多数接触问题需要计算摩擦。摩擦是与路径有 关的现象,摩擦响应还可能是杂乱的,使问题求 解难以收敛。
§3 自动时间步、控制
再接触条件对重整产品收率的影响

该1 Mt / a 催化 重整 装置 是 以初 馏 点 ~1 6 0℃
的石 脑油 为原 料 , 采用 成 熟 的 国产超 低 压 连 续 重
一
1 8一
第4 3 卷 第4 期
罗 妍. 再接触条件对重整产品收率的影 响
表 2 重整产品各组分产率( 对重整进料 ) T a b l e 2 Y i e l d s o f c o m p o n e n t s ( f e e d ) W。 %
用工程消耗 、 设备投资的影响。得出的结论为 : 虽然降低再接触温度及提高再接触 压力使装置 的投 资增 加 , 但对增 加液体产 品收率及氢气纯度效果十分显著 , 尤其是对一些规模中等且后部又没有 对重整氢 中可液化组 分进行有效 回收过程的装置 , 经济效益十分明显。
关键词 : 重整装置
系 电话 : O 3 7 9— 6 4 8 8 5 5 9 2 , E - ma i l : l u o y a n . 1 p e c @s i n o p e c . c o n。 r
以某 炼油 厂 中 的连 续 重整 装 置 的 原 料 、 反 应 条件 、 反应 产物 为基 准进行 比ห้องสมุดไป่ตู้ 。
摘要 : 重整装置中设置再接触部分 的目的是使重整氢 和重整生成油在一定的温度 和压力 下接触建立新 的气液 平衡 。以某套连续重整装置为例 , 通过提高再接触压力及 3种改 变再接触温 度 的方式 , 即: 不设置 氨冷冻 系统 、 设
置氨冷冻 系统和采用系统管网的冷冻水 , 对 比不同的再接触 温度及压力对重整氢 纯度 、 收率 、 重整生成油 收率及公
作车 用汽 油 的调和组 分 , 也 可经 芳烃抽 提 制取苯 、
Abaqus-Explicit-接触问题

1. Abaqus/Explicit 中的接触形式双击Interactions,出现接触形式定义。
分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。
1. 通用接触 General contact通用接触用于为多组件,并具有复杂拓扑关系的模型建模。
General contact algorithm• The contact domain spans multiple bodies (both rigid and deformable)•Default domain is defined automatically via an all-inclusive element-based surface• The method is geared toward models with multiple components and complex topology。
• Greater ease in defining contact model2. Surface-to-Surface contactContact pair algorithm• Requires user-specified pairing of individual surfaces• Often results in more efficient analyses since contact surfaces are limited in scope3. 自接触(Self-contact)自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。
如弹簧的压缩变形,橡胶条的压缩。
•容易使用•“自动接触”•节省生成模型的时间•通用接触算法一般比双面接触算法快机械约束形式•运动依从Kinematic contact method(只有接触对形式可用,General contact不可用)默认的运动接触公式达到的计算精度与接触条件相一致。
接触分析

ANSYS有三种类型的接触单元:点对点:最终位置事先知道;只能用于低次单元点对面:接触区域未知,并且允许大滑动;面对面:接触区域未知,并且允许大滑动(相对点对面接触有几个优点)。
接触分析属于高度非线性分析,需要较多的计算资源,这对网格划分以及接触面的选择提出了较高要求。
ansys可完成的接触分析主要有三类:点点,点面,面面接触分析;接触分析主要分为两类:刚体—柔体接触以及柔体—柔体接触。
其中,金属成型分析是典型的刚体柔体接触,一般的接触的问题均为柔体——柔体接触。
★分析的难点在于:1.接触面的识别和选择;2.摩擦模型的选择。
ansys接触分析是通过建立一层接触单元覆盖在接触面之上点点接触一般较少使用,它适用于:预先知道接触位置,且相对滑动忽略,转动量很小,即使是几何非线性分析。
一些过盈装配问题可以采用点点接触代替面面接触;点面接触不需要知道确切接触位置,也不必保持网格一致,允许较大的变形和相对滑动。
这种接触推荐采用contact48而不是26来计算;面面接触是最为常见也是适用范围较广的接触类型:★几个原则(asymmetric contact):接触单元不能渗入目标面,但是目标(面上的)单元可以渗入接触面。
目标面总是刚性的,接触面总是柔性的。
平面或者凹面为目标面;网格细致的为接触面,网格粗糙的为目标面(目标面可以被渗入);The softer surface should be the contact surface and the stiffer surface should be the target surface.高阶单元为接触面,低阶为目标面;However, for 3-D node-to-surface contact, 低阶单元为接触面,高阶为目标面;面积大的是目标面。
In the case of 3-D internal beam-to-beam contact modeled by CONTA176 (a beam or pipe sliding inside another hollow beam or pipe),内部的为接触面,外部为目标面;However, when the inner beam is much stiffer than the outer beam, the inner beam can be the target surface.若不能很好的区分接触面和目标面(When there are several contact pairs involved in the model, and the graphical picking of contact and target surfaces is difficult, you can just define the symmetric contact pairs and, by setting KEYOPT(8) = 2)可采用对称接触分析(Symmetric Contact),即通过设置KEYPOINT(8)=2 实现。
大变形问题有限元分析
所以,从方法上说,弹塑性问题有限元方法包含了大 变形问题有限元和接触问题有限元两类问题的所有特点。
2020/4/5
18
第18页/共26页
大变形分析中的载荷处理 (1/4)
载荷目前还没有考虑
TL法的载荷项: V uT b uT b dV 0 S uT te tedS0 uT P P
v j xi
旋转率
11
第11页/共26页
大变形分析中的本构关系(5/5)
三种本构关系间的关系
对于实际的大变形问题,上述三种本构关系并不等价。可以证明,弹性 材料是一种特殊的次弹性材料,超弹性材料是一种特殊的弹性材料。
次
弹
性 材
弹性 超弹性 材料 材料
料
实际材料所遵守的本构关系,只有通过实验测试才能得以确定。
虚功方程:
t 时刻:
t T St ut T bt dV 0 ut T tt dS0 ut T Pt 0
V
S
e
t t 时刻:
V
S tt T
tt
tt
u
T
tt
b
dV 0
S
u t dS tt T tt
2020/4/5
12
第12页/共26页
大变形问题有限元方程的建立 (1/6)
与塑性力学有限元方法的异同
相似:都采用增量方法,都不显含时间。 区别:塑性力学的本构关系随加载变化,而大变形问题的构型随加载变化。
导致分析方法、应力应变描述、本构关系、控制方程的变化。
TL?UL? 本节讨论
构型对应 客观性描述 构型相关,本节讨论 。。。
接触与大变形问题的光滑有限元分析
接触与大变形问题的光滑有限元分析
范亚杰;李燕;李中潘;陈荟键;冯志强
【期刊名称】《应用数学和力学》
【年(卷),期】2024(45)2
【摘要】橡胶材料因具有良好的抗震、吸能作用,在实际工程中应用广泛.然而橡胶超弹性材料的碰撞属于强非线性问题,分析橡胶材料的接触碰撞和大变形问题对于提高装置的缓冲性能具有重要意义.光滑有限元法(smoothed finite element method,S-FEM)是一种弱形式的数值计算方法,相比于传统的有限元方法,光滑有限元法对网格的质量要求不高,允许单元在计算过程中发生较大的变形,且光滑域的构造比较灵活,在不增加自由度的前提下,可以达到较高的精度.在光滑有限元法的基础上,采用双势方法进行接触计算,以充分利用光滑有限元法计算大变形问题的优点和双势方法求解接触力的优势.通过与有限元软件MSC.Marc的数值结果对比,验证了该算法的准确性和能量守恒性,并且分析了摩擦因数对碰撞体的影响.
【总页数】17页(P127-143)
【作者】范亚杰;李燕;李中潘;陈荟键;冯志强
【作者单位】西南交通大学力学与航空航天学院
【正文语种】中文
【中图分类】O343.3
【相关文献】
1.大扰动下一维接触过程的光滑性
2.二维弹性大变形接触问题的实用有限元分析
3.大变形曲梁接触问题有限元分析
4.光滑圆柱与粗糙板的弹塑性接触的有限元分析
5.考虑基体变形的结合面连续光滑接触刚度模型
因版权原因,仅展示原文概要,查看原文内容请购买。
橡胶结构有限元分析收敛问题的对策
需要进行迭代,而是在方程里直接求出接触力(接触压力):瓦=n
Feontaet。从而,拉格朗日乘子法不需要定义人为的接触刚度去 满足接触面间不可穿透的条件,可以直接实现穿透为零的真实接 触条件,这是罚函数法所不可能实现的。
4.4载荷步与载荷子步
4.4.1载荷步
关于载荷步的设置,小的载荷步增量比大的载荷步增量更 有利于计算的收敛。实践证明,在进行橡胶之类材料大变形分析 中,采用合理的多载荷步将载荷逐步加载到结构上,其收敛速度
有限元模型根据yx密封圈孔轴密封沟槽边界条件以及ansys的功yx封圈的有限元模型简化为平面对称模型yx密封圈截能面结构及尺寸参照国家标准jbzq42651997轴用yx形密封7圈进行建模按公称内径为d300mm的轴用yx密封圈建模2mooneyrivlin材料模型yx橡胶密封圈采用的是tpu聚氨酯材料工程上主要是以连续介质力学为基础橡胶材料被认为是超弹性近似不可压缩体弹性模量取为78mpa泊松比为05不可压缩材料
万方数据
266
夏Y-ql等:橡胶结构有限元分析收敛问题的对策
第7期
CONTAl71或TARGEl69一CONTAl72来模拟Yx密封圈对轴和 沟槽的非线性接触行为,橡胶单元采用不带中间节点的平面 PLANEl82或带中间节点的平面PLANEl83超弹性单元来模拟, 分别采用高阶单元和低阶单元进行计算,以验证不同单元的收敛 性(ANSYS较早的版本采用HPPER56,HPPER74等超弹性单 元),设置单元关键字KEYOPT(3)=2来模拟平面应变(Plane strain)问题,使用U—P单元公式计算超弹性问题。轴圆柱面接触 线和密封沟槽界限划分为刚性目标单元TARGEl69,密封圈与之 产生接触的边线划分为接触单元CONTAl71或CONTAl72 (CONTAl71单元与PLANEl82单元对应使用,CONTAl72单元
非线性-接触分析
接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS 使用的接触单元和使用它们的过程,下面分类详述。
点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大变形条件下接触设置对计算结果的影响
李晓[1],卜继玲[2],黄友剑
[1]
(1.
株洲时代新材料科技股份有限公司, 湖南 株洲 412007
2.
西南交通大学机械工程学院,四川 成都 610031
)
摘要
: 本文结合具体产品分析,对大变形条件下的复杂接触状态情况、讨论了不同接触设置对计算
收敛的影响以及计算结果精度的影响。最后通过把仿真计算结果与试验结果相比较,验证了接触设
置的合理性。
关键词
:接触;刚度;有限元分析
Abstract:In this paper, product-specific analysis of large deformation of the complex under
the conditions of contact state, discussed the calculation of different contact condition
settings, as well as the impact of convergence and calculation accuracy. After comparing the
analyzed results with the testing results, the reasonability of the setting is verified.
Key Word:Contact; Stiffness; FEA analysis
1 前言
在有限元仿真分析中,不仅有简单的单个零件结构的力学性能分析,还会遇到很多对组装产品
结构的性能进行仿真分析。组装产品大多是由至少两个以上的零部件组成,这样各个零部件之间有
很多的接触面,在有限元分析前处理时,就需要对实际接触的面定义接触。众所周知,接触问题是
目前有限元分析问题中的一个难点问题,比如接触收敛问题以及计算结果精度是很难控制的,特别
是涉及大变形情况下的接触分析。本文以具体组装产品为例,利用Abaqus软件求解器,讨论不同接
触设置对收敛的影响以及计算结果精度比较。
2 产品结构简介
本产品是用于汽车悬挂上的一种装置,产品由吊杆头、吊杆、吊杆缸筒、封口端盖以及三橡胶
弹簧组成,其结构几何模型平面图见图1,产品的三维模型图见图2。
图1 仿真分析产品结构平面示意图
图2 仿真分析产品三维模型图
3 有限元模型处理与计算
本文的分析计算主要是仿真计算吊杆在受拉与受压两种情况下,产品的刚度性能。从图1与
图2可以看出,两边吊杆在受拉或受压时,三橡胶弹簧会沿着外套移动,这样就会存在橡胶弹簧
的外表面与外套的接触;橡胶弹簧的上、下两面以及橡胶弹簧的内孔壁面与吊杆相接触;橡胶弹
簧受挤压而变形引起的自接触。对此大变形条件下的复杂接触状态,要求合理的接触对设置才能
得到良好的计算收敛性以及满足计算精度。
3.1 材料本构模型及参数
产品结构中吊杆、吊杆头及外套等采用金属材料Q235A制作,橡胶弹簧和关节采用天然橡胶制
作。由于橡胶属于具有超弹性、黏弹性特质的材料,本文采用Mooney—Rivlin本构模型模拟胶料属
性,其应变能函数W的本构模型[2]为:
ji
jiijRIICW)3()3(210,
(3-1)
本文分析时采用的胶料硬度为65 shore A,计算时取Mooney-Rivlin模型的参数分别是:C10
值为0.43;C01值为0.09;D1值为0.001[1]。
本文中金属部分材料计算弹性模量取为210GPa,泊松比取0.3,屈服极限为235 MPa。
3.2 计算模型
本文主要是讨论接触设置对计算收敛性以及计算精度的影响,因此本文算例不考虑吊杆头部分,
只考虑三橡胶弹簧、外套、吊杆圆柱部分,这样就可以用轴对称模型来模拟几何结构,大大减少了
计算工作量,同时也方便了接触对描述。仿真分析受拉情况,不用考虑中间的橡胶弹簧,且上下橡
胶弹簧受力特点一样,故只建一半模型;本文以分析计算产品受拉刚度为例来讨论接触问题。
3.3 接触设置对计算收敛的影响
从图1可以看出,产品受拉情况下,仿真分析边界条件共存在有4个接触对,分别是橡胶弹簧
上、下两面与吊杆和外套的接触;橡胶弹簧的内、外侧面与吊杆的外表面和外套的内表面的接触。
受拉情况的载荷条件是两边吊杆沿轴向拉伸6mm,在此受载情况下,橡胶弹簧的两侧面相对吊杆和
外套有很大的滑移,同时橡胶弹簧受挤压会产生很大的变形。
接触设置条件1:橡胶弹簧上下两端面用绑定(Tie)接触方式,两侧面选择小滑移(Small sliding),
接触方式,接触属性用(Penalty)公式,其他全用默认设置。仿真结果表明,这种设置的收敛性很
差,计算收敛状况如图3所示。
图3 接触设置条件1计算收敛状态示意图
图4 接触设置条件2接触方式示意图
接触设置条件2:橡胶弹簧上下两端面用绑定(Tie)接触方式,两侧面选择有限滑移(Finite sliding)
接触方式,在接触控制(Contact Controls)选项里修改(Specify slide distance)这一项的值,本
文计算此值设为2;选择接触属性用(Penalty)公式,法向约束力方法选择(Augment Lagrange
(Standard)),勾上(Allow separation after contact)[3]。接触设置条件2各属性参数见图4。在
此接触设置情况下的仿真分析结果表明,相比接触条件1,有更好的计算收敛性,如图5所示。
图5 接触设置条件2收敛状态示意图
考虑到橡胶弹簧的上、下两面与吊杆和外套之间可能存在相对位移,因此进一步设置接触设置
条件3:用小滑移(Small sliding)及(Penalty)接触属性,其他接触设置与接触设置条件2一样。
此时的仿真分析表明,其收敛性比接触设置条件2稍差,但在本文所加载荷条件下仍能完全收敛。
3.4 接触设置对计算结果精度的影响
有限元仿真分析的目标是分析结果的准确程度,因此将接触设置条件2和3的分析结果与试验
结果进行对比,寻求最佳的接触边界条件设置。接触设置条件2、接触设置条件3的刚度计算结果与
试验结果比较见下图6,从图6可以看出,接触设置3的计算结果与试验结果最接近,证明此接触设
置最合理。因为(Tie)接触设置计算时,两接触面上各节点之间就没有相对滑动,所以会造成计算
刚度比(Penalty)接触计算刚度、试验测试刚度要大。、
载荷—位移曲线
0
500
1000
1500
2000
2500
3000
0123456
加载变形量(mm)
载
荷
值
(
N
)
试验数据
接触条件3
接触条件2
图6 不同接触条件计算刚度曲线与试验刚度曲线比较图
4 结束语
本文以具有的大变形、多接触特点的产品为例,通过相同载荷、不同接触方式下的仿真计算结
果比较,可以得到以下结论。
利用Abaqus求解器处理大变形仿真分析是可行的,在模型正确与所用材料参数及设置准确的基
础上,可以得到很高的计算精度。
对大变形情况下的接触分析,使用有限滑移比小滑移能得到更好的计算收敛性。对接触状况复
杂的分析,可以通过合理的设置接触控制参数得到好的计算收敛性。
根据实际情况选择合理的接触约束方式才能使计算结果精度更高,比如只要接触面之间有很小
的滑移,用(Tie)接触约束方式比滑移接触方式的计算误差会更大。
参考文献
[1] 杨挺青,罗文波. 黏弹性理论与应用. 科学出版社.
[2] 成大仙. 《机械设计手册》. 化学工业出版社.
[3] Abaqus Analysis Users’s Manual.