一种高精度自动调平工作台设计
剪叉式升降台安全规程

剪叉式升降台安全规程JB 5320—2000国家机械工业局2000—04—24批准2000—10—01实施前言本标准是对JB 5320.4—91《剪叉式升降台安全规程》的修订。
修订时对原标准进行了编辑性修改。
本标准与原标准相比,主要技术内容修改如下:1.增加了剪叉式升降台容易产生的危险;2.增加了结构安全系数等技术内容;3.增加了附录A。
本标准自实施之日起代替JB 5320.4—91。
本标准的附录A是提示的附录。
本标准由北京起重运输机械研究所提出并归口。
本标准负责起草单位:北京起重运输机械研究所。
本标准参加起草单位:太原·索斯沃斯升降台有限公司、江苏如皋装卸机械厂、山东济阳机械厂。
本标准主要起草人:王万永、谭俊龙。
1 范围本标准适用于升降部分的结构为剪叉式的各种升降台,即固定式升降台、移动式升降台、自行式升降台(直流电动机驱动、交流电动机驱动)、升降车。
本标准规定了剪叉式升降台的设计、制造、检验、使用与报废等方面的安全要求。
剪叉式升降台主要供登高作业和垂直输送物品。
在剪叉式升降台设计的升、降高度范围内任一高度均可使用。
2 引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。
本标准出版时,所示版本均为有效。
所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB/T 985一1988 气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸GB/T 986—1988 埋弧焊焊缝坡口的基本形式和尺寸GB/T 3323一1987 钢熔化焊对接接头射线照相和质量分级GB/T 3766—1983 液压系统通用技术条件GB/T 5117一1995 碳钢焊条GB/T 5118—1995 低合金钢焊条GB/T 5293—1985 碳素钢埋弧焊用焊剂GB/T 8110—1995 气体保护电弧焊用碳钢、低合金钢焊丝3 各种危险剪叉式升降台容易产生的危险如下:a)机械危险;b)电气危险;c)在设计时由于忽略了人类工效学产生的危险;d)由于能源失效、机械零件损坏或其他功能故障产生的危险;e)由于安全措施错误或不正确的定位产生的危险。
曲臂式高空作业车液压系统设计及研究
曲臂式高空作业车液压系统设计及研究蒙杨超;董自安;肖泽桦;王珂【摘要】The rapid development of hydraulic technology makes firm or stable the technical basis for developing aer-ial vehicles. By aerial overall design requirements, the completion of aerial main unit and its corresponding hydrau-lic system are designed. Crank aerial vehicles are made up the chassis, power systems, hydraulic systems, expanding the bridge device, steering device, turning device, luffing devices, telescopic device, leveling device, the job bucket swing devices and electronic control systems and other accessories. The actuator control system needs more control and needs more proportional control actuator characteristics, the system uses a form of control cartridge valve block built proportional flow control valve to achieve the requirements of the work unit coordinated control of multi-task-ing. As an independent driver of the vehicle, walking drive system design is one of the key technologies of the vehi-cle. In order to achieve remote speed performance running the system and achieve energy efficiency, stable perfor-mance, we use a variable displacement pump hydraulic closed loop control circuit in the form of a two-speed motor drive system as walking. In this paper, based on the design principle of the hydraulic system, a detailed discussion of the crank-propelled aerial work vehicle hydraulic system design approach is introduced, which provids a comprehen-sive design methodology and platform for the design of all types of aerial vehicles hydraulic system.%液压技术的快速发展给我国高空作业车的开发、研制奠定了技术基础。
基于经纬仪的自调平台海态水平度的测量
第37卷,增刊红外与激光工程2008年4月V ol.37SupplementInfrared and Laser EngineeringApr.2008收稿日期:2008-03-24作者简介:张忠武(),男,工程师,主要从事精密仪器设计与角度测试校准技术研究。
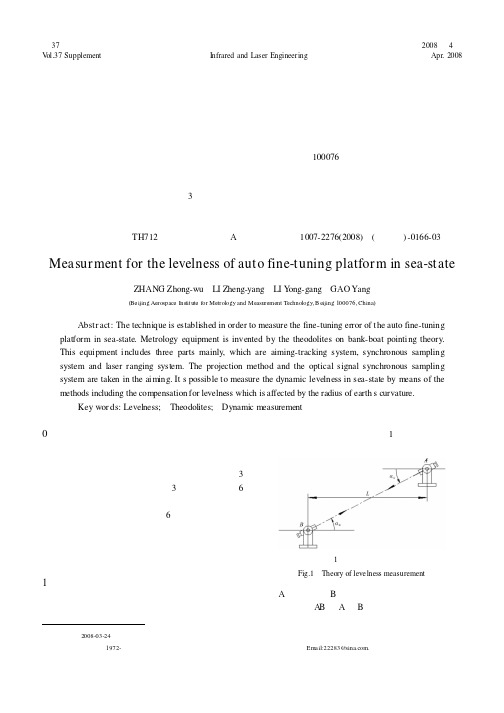
3@基于经纬仪的自调平台海态水平度的测量张忠武,李政阳,李永刚,高扬(北京航天计量测试技术研究所,北京100076)摘要:自调平台海态调平误差的测量采用岸、船经纬仪对瞄、内错角相等的原理,装置分成对瞄跟踪、同步采样和激光测距等3部分。
采取投射法对瞄、光同步采样、测距补偿地球曲率对水平度的影响等方法,使海上动态水平度的测量成为可能。
关键词:水平度;经纬仪;动态测量中图分类号:TH712文献标识码:A文章编号:1007-2276(2008)增(几何量)-0166-03Measurment for the levelness of auto fine-tuning platform in sea-stateZHANG Zhong-wu ,LI Zheng-yang ,LI Y ong-gang ,GAO Yang(Beijing Aerospace Ins tit ute for Metrology and Measurement Technology,B eijing 100076,China)Abstr act:The technique is established in order to measure the fine-tuning error of the auto fine-tuning platform in sea-state.Metrology equipment is invented by the theodolites on bank-boat pointing theory .This equipment includes three parts mainly ,which are aiming-tracking system,synchronous sampling system and laser ranging system.The projection method and the optical signal synchronous sampling system are taken in the aim ing.It ’s possible to measure the dynamic levelness in sea-state by m eans of the m ethods including the com pensation for levelness which is affected by the radius of earth ′s curvature.Key wor ds:Levelness;Theodolites;Dynamic m easurement0引言水平度是角度量的参数,海态水平度是动态角度量。
云梯车【精选文档】
一、云梯车概述云梯车作为现代城市消防中的必要装备,随着城市高层建筑的普及而逐步向大型化方向发展,对大型登高云梯车总体的设计,能够推动国产云梯车的设计技术水平登上新台阶。
云梯车作为一种灭火救人的特种设备,在现代城市消防中获得广泛应用。
产品己由最初的小型号、机械传动、简单的机电控制发展到现代的大举升高度、液压传动、智能化控制。
产品的系列、性能及功能日趋完善,型式和数量越来越多,举升高度越來越大,目前世界上最高的云梯车举升高度已达到112米。
在我国,受高层建筑起步晚及产品开发难度大等因素的影响,国内云梯车的开发大部分停留在50米以下的车型扩展。
目前,我国100万人口以上的城市基本按照消防规划装备了30〜50米的云梯车.随着高层建筑的普及和快速发展,50米以下的云梯车已经不能满足大中城市对云梯车更大型化的需求。
开发大型登高云梯车,对发展我国的大型登高类消防车,有着不可估量的社会意义和经济价值,能有效的打破国外垄断的现象。
二、云梯车特点云梯车主要是随着城市高层建筑的发展而发展起来的,其在现代城市消防中发挥着越来越重要的作用.究其原因,主要是云梯车本身具有诸多其他消防及特种设备无法比拟的优势,具有应用范围广、作业区域大、安全限位保护措施及应急操作系统完备、机动灵活、转场方便等特点。
1、应用范围广云梯车是集消防灭火、应急救援、高空喷洒、喷射和高空工程作业等功能于一身的综合型特种设备.工作平台上设置的救援用吊耳可用于担架或吊篮营救和转移已伤亡的人员。
广泛适用于城市、矿山、油田等高层建筑的消防、救援工作,是扑灭中高层建筑火灾、救护遇险人员、抢救财产的必要装备。
此外还可用于高空工程施工作业,如大型设备的外部检修,风力发电机组的安装维护等。
2、作业区域大云梯车的臂架采用混合臂式,通过不同的组合方式实现不同的起升髙度和幅度.可将消防灭火、抢险救灾的作业范围在垂直高度上扩展至78米,可在一定高度的高层建筑及一定深度的低洼地带进行救援和作业. ^3、完备的安全限位保护措施及应急操作系统为了切实保障消防作业的安全,保证人员的生命安全,且动作平稳、准确,登高平台消防车设置有诸多安全限位保护措施(见安全保护系统)及应急操作装置。
机械类毕业设计大全

机械类毕业设计大全D1.0t普通座式焊接变位机工装设计巷道式自动化立体车库升降部分设计巷道堆垛类自动化立体车库设计茶树修剪机的设计板材送进夹钳装置设计外圆磨床设计大模数蜗杆铣刀专用机床设计300×3型钢轧钢机设计高效二次风选粉机设计鼓形齿联轴器的设计5自由度焊接机器人总体及大臂与腰部设计薄板定尺机构的设计桥式起重机副起升机构设计液压潜孔钻机动力头回转机构设计JZ—I型校直机设计龙门起重机设计运送铝活塞铸造毛坯机械手设计DX型钢丝绳芯式带式输送机设计小汽车维修用液压升举装置双螺杆压缩机的设计稀油润滑液压系统设计2110型柴油机气缸盖加工工艺规程设计及夹具设计D180柴油机12孔攻丝机床及夹具设计乳化液泵的设计中单链型刮板输送机设计75米钻机的总体设计200米液压钻机变速箱的设计AWC机架现场扩孔机设计CA6110型铝活塞的机械加工工艺设计及夹具设计DZ60振动打桩锤的设计露天选采机液压系统设计R175型柴油机机体加工自动线上用多功能液压机械手T611镗床主轴箱传动设计及尾柱设计WY型滚动轴承压装机设计EQY-112-90 汽车变速箱后面孔系钻削组合机床设计双活塞液压浆体泵液力缸设计TMJ200型水果糖糖料拉白机设计回旋冲击钻具轴承结构及润滑方式设计螺杆压缩机系统装置设计小型钢坯步进式加热炉液压传动系统设计大直径桩基础工程成孔钻具I型钻具总体设计大流量安全阀的设计四杆中频数控淬火机床总体及上料机构设计回旋冲击钻具星形运动结构设计平面关节型机械手设计大排量斜盘式轴向柱塞泵设计XQB小型泥浆泵的结构设计Z32K型摇臂钻床变速箱的改进设计YTP26气腿式凿岩机机体工艺、夹具设计汽车变速器上盖钻孔组合机床设计数控铣床的主轴箱结构设计宠物垫生产线的部件机械设计大功率减速器液压加载试验台机械系统设计打印机压轮设计带式输送机摩擦轮调偏装置设计电站水轮机进水阀门液压系统控制设计多功能甘蔗中耕田管机改进设计EX1000高效二次风选粉机(传动及壳体部件)设计内充种气吸玉米免耕播种机的设计—镇压部分的设计立木地板加工机床成型机分度机构设计小型三辊卷板机设计叶型加工工装设计Z3050摇臂钻床预选阀体机械加工工艺规程及镗孔工装夹具设计液压泵上体阶梯孔的机床专用夹具计算机辅助设计研究(含Pro/E)凸轮机构的模糊优化设计滚动轴承设计与自动计算程序设计机械式四档变速器设计曲轴润滑油孔加工机床的设计钩尾框夹具设计绞肉机的设计移动式X光机总体及移转组件设计XTK7140数控立式铣镗床及控制系统设计XKA5032A/C数控立式升降台铣床自动换刀设计XK100立式数控铣床主轴部件设计ZXK-7532数控立式钻铣床主运动、进给系统及控制系统设计XK5040数控立式铣床及控制系统设计X6232C齿轮加工工艺及其齿轮夹具和刀具设计CK6132数控车床总体及进给驱动部件设计三面铣组合机床液压系统和控制系统设计铣边机组合机床设计铣削组合机床及其主轴组件设计组合镗床设计旁承上平面与下心盘上平面垂直距离检测装置的设计托森差速器的设计制冷系统综合试验台设计挠性转子固有不平衡、永久性弯曲研究和故障诊断知识库设计刨煤机截割部设计及滑靴设计刨煤机输送系统与滑架设计普通式双柱汽车举升机设计2BJM-2型免耕精播机设计气动通用上下料机械手的设计无模压力成形机设计三爪卡盘增力机构夹具设计压缩机箱体加工工艺及夹具设计机械手结构的总体方案设计壳体零件机械加工工艺及工艺装备设计台式数控龙门雕刻机工作台及Y轴传动部件设计单拐曲轴零件机械加工工艺及工艺装备设计驱动式滚筒运输机设计CA6140主轴加工工艺及夹具设计齿轮泵泵体工艺及加工Φ14、2-M8 孔夹具设计定尺机装置设计铁水浇包倾转机构的设计挖掘机工作装置液压系统设计半轴机械加工工艺及工装设计小区自动化立体车库设计ML280螺旋钻采煤机推进机构的设计组合机床动力滑台液压系统的设计GKZ高空作业车液压和电气控制系统设计高空作业车工作臂结构设计及有限元分析高空作业车转台的结构设计及分析液压钻机本体组合机床设计液压控制阀的理论研究与设计中型四柱式液压机及液压系统设计轴向柱塞泵设计CA6150车床主轴箱设计205t桥式起重机控制线路设计无轴承电机的结构设计C6136型车床经济型数控改造(横向)设计西门子802s数控车床的进给控制设计CNC3136A数控车床电气系统设计轮式装载机行走系统及装置设计基于工控机和PLC设计喷油泵实验台监控系统凸轮机构CAD系统开发闭风器的设计(机械毕业论文) PRO/e图纸啤酒桶清洗机设计GBW92外圆滚压装置设计立式加工中心主轴组件的结构设计铰链座制造工艺及夹具设计液压静力压桩机夹桩压桩机构设计YZY全液压静压桩机的电气控制系统总体设计梳棉机箱体加工工艺及组合机床设计基于电片机的家庭防盗报警器络筒机槽筒专用加工机床及夹具设计基于单片机一氧化碳报警器设计保持架机械加工工艺及夹具设计矿用提升机的设计隧道掘进机概况及管片受力的有限元分析板材弯曲成形有限元数值模拟分析(有限元毕业论文)基于单片机的交通灯自动控制器设计可伸缩带式输送机结构设计(机械设计毕业论文)基于单片机实现红外测温仪设计MG132/320-W型采煤机左牵引部机壳的加工工艺规程及数控编程MG250/591-WD型采煤机右摇臂壳体的加工工艺规程及数控编程+送料机械手设计及Solidworks运动仿真经济型数控系统研究与设计电机轴的失效分析和优化设计四点接触球轴承的设计现场典型工业设备的PLC控制系统设计数控机床复杂零件的加工过程设计PLC自动换刀电气控制的设计原棉水分测定仪的工作原理及硬件电路设计消防智能电动车设计与制作空调压缩机用无刷直流电动机进行设计及相应控制系统的设计汽车雨刷器的设计及硬件控制水果套袋机设计水位检测仪系统设计远程多路智能家用电器控制器设计智能导热系数测试仪测控系统的设计智能温度控制系统设计智能型配电控制柜设计基于射频技术的IC卡的研究基于Mastercam造出洗洁精瓶的零件模型设计TDA2003音频功率放大器的设计基于DDS芯片AD9850的正弦发生器设计火车摇枕磨耗板自动焊接机的电器控制系统设计CA6150数控车床主轴箱及传动系统系统的设计YZY400静力压桩机设计开发-大身结构有限元应力、强度分析行星减速器设计三维造型虚拟设计分析带轮的参数化设计龙门刨床的可控硅调速系统控制电路的设计铝合金仪表上盖与底座零件的数控加工工艺设计易拉式罐盖垫的自动上料机构的设计旋转罐装机的设计支撑掩护式液压支架总体方案及立柱设计飞机前起落架收放机构设计火车制动梁用异型材矫直机的设计矿用液压支架的设计自动涂胶机设计红外电子桩考系统的设计摩托车交流底盘测控系统设计YZY400全液压静力压桩机的横向行走及回转机构设计汽车信号灯控制系统设计三自由度圆柱坐标型工业机器人设计送料机械手设计及Solidworks运动仿真经济型数控系统研究与设计球磨机给矿控制系统设计1.光轴生产线专用气压搬运机械手设计2.机械毕业设计:转载锤式破碎机总体设计3.双齿辊破碎机设计4.机械毕业设计:混凝土搅拌机设计5.冲击器试验台液压系统设计6.ZMX粉碎机下机体支承面专用铣床设计7.14米高空作业车液压系统设计8.机械毕业设计: 机械手设计9.四自由度多用途气动机器人(机械手)结构设计及控制实现10.轿车变速箱设计(五档变速器设计)11.天然气电控发动机设计毕业设计12.TGSS-50型水平刮板输送机---机头段设计13.组合机床设计14.1G-160型旋耕灭茬机总体及侧边传动装置设计15.机械毕业设计:颚式破碎机设计16. 除雪机的转载部分结构设计17. 井下胶带输送集成控制18. 普通带式输送机的设计19. 泵吸式清淤系统设计20. 基于S7-300 PLC的带传动实验台远程控制系统的研究21. 基于Web的带传动实验台远程虚拟实验软件的研究22. 液压传动虚拟实验设计23.卷扬机设计24. 提升机驱动系统设计25. 双齿减速器设计26.5T重轮式装载机的装载机设计27.普通铣床数控化改造设计28.复摆颚式破碎机设计29.气流粉碎机设计与粒度控制30.低速载货汽车驱动桥设计31.压力机与垫板间夹紧机构设计32.FDP-15非开挖钻机设计33.J45-6.3型双动拉伸压力机及PLC控制系统设计34.机械毕业设计:MC型埋刮板输送机设计35.数控回转工作台设计36.机械毕业设计:冲压搬运机械手设计37.行走式小型液压起重机设计38.150T液压机设计39.机械毕业设计:机床上下料机械手设计40.矿用固定式带式输送机设计41.气门摇杆轴支座设计42.机械毕业设计:卸料器的设计及改进设计43.薄煤层采煤机总体方案设计及截割减速器设计44.BM—4010PD万达汽车后驱动桥设计45.普通CA6140车床的经济型数控化改造设计46.机械毕业设计:数控钻床横、纵两向进给系统的设计47.铣床的数控X-Y工作台设计48.机械毕业设计:液压绞车泵站设计49.膜片离合器设计50.400型水溶膜流研成型机设计51.自动售货机的PLC系统设计52. 机械毕业设计:圆盘剪切机设计53.Y—6.3S型液压机机械结构设计54.Φ2.4×11m球磨机总体及筒体设计55.立体车库内部机械结构优化设计56.液力传动变速箱设计与仿真设计57.数控车床系统XY工作台与控制系统设计58.矸石制浆材料工业生产线系统设计59.Ф2600筒辊磨滑履支承及密封装置设计60.C6140普通车床的数控化改造设计61.液压防溢板设计62.专用机床液压系统设计63.中煤层采煤机截割部设计64.车载机械自动调平机械系统设计65.四自由度的工业机器人设计66.J01型机械转向器设计67.电动观光汽车总体设计68.定梁数控龙门镗铣床溜板进给系统设计69.聚氯乙烯搅拌反应釜设计70.Santana2000轿车制动系统设计71.轿车机械式变速器设计72.XA5032普通立式铣床进行数控化改造(普通铣床数控化改造)73.普通车床的数控化改造74.组合钻床设计75.组合镗床设计76.凿岩机机头零件工艺规程及工艺装备设计77.CA6140车床尾座体的工艺规程以及设尾座体的两组专用夹具设计78.薄煤层采煤工作面电缆拖移系统79.掩护式液压支架设计80.综采工作面大型刮板输送机设计81.履带式半煤岩掘进机设计82.放顶煤开采液压支架设计83.矿车轮对装拆机设计84.装煤机设计85.矿车清车机86.薄煤层采煤机牵引部设计87.薄煤层采煤机截割部设计88.矿山机械实验室设备管理系统的建立89.瓦斯抽放液压钻机设计90.机械毕业设计:pc-φ800×800锤式破碎机设计91.双腔鄂式破碎机设计92.液压式测力装置设计93.卧式钢筋切断机设计94.工业机械手模型基于PLC的控制系统软硬件设计95.船舶辅助机械PLC控制系统设计96.板料折弯机液压系统设计97.柴油机P型喷油器设计98.螺旋管状面筋机总体及坯片导出装置设计99.数控多工位钻床设计100.柴油机供油角度自动提前器的结构特点与制造工艺设计101.机械毕业设计:数控钻床横、纵两向进给系统的设计论文下载含cad图纸102.机械毕业论文:经济型数控车床控制系统设计论文下载含cad图纸103.自动售货机设计104. 振动筛式花生收获机的设计105.给料装置传动系统设计106.工业机械手液压系统设计107.离心通风器设计108.R180柴油机曲轴工艺设计及夹具设计109.矩形型材端面坡口铣削机设计110.钢筋调直机的设计111.DTⅡ胶带输送机设计112.XK5025型数控立铣床自动换刀装置设计113.机械毕业设计:靠模攻丝组合机床设计114.机械毕业设计:搅拌器设计115.机械毕业设计:加工中心主传动系统(电主轴)设计116.CA6140普通车床的数控化改造设计117.机械毕业设计:DTII型固定式带式输送机设计118.气门摇臂轴支座的机械加工工艺及夹具设计119.离合器设计119.汽车ABS防抱死制动系统设计120.专用榫齿铣PLC电气控制系统设计121.随车提升机的设计122.468Q发动机缸体双面卧式钻床总体设计及左主轴箱设计123.PLC自动售货机设计124.CA6140车床拨叉A加工工艺及夹具设计125.CA6140车床拨叉C加工工艺及夹具设计126.自来水厂流量、水压远程采集系统设计127.汽车轮胎内压自动监测及便携式补气装置设计128.离心通风器设计论文129.阀堵工艺工装设计及CAD/CAM130.32/5T桥式起重机起升机构设计131.QAY50起重机设计132.CA6410车床拨叉831002加工工艺和夹具设计133.齿轮箱工艺钻2-φ20孔工装及专机设计134.齿轮箱工艺钻孔工装及专机设计135.送料机械手设计136.U型管式换热器设计137.CAK6150普通车床的数控化改造138.斜胶胎2号成型机四连杆式后压滚设计139.啤酒周转箱注射机液压系统设计140.轻型液压浅孔钻机设计141.中等压力润滑泵的设计142.炼钢厂滑动水口液压系统设计143.活塞工艺夹具设计144.农业机械毕业设计:水力驱动带状喷灌系统设计145.卧式加工中心自动换刀机械手设计146.固定式智能水泥包装机设计147.带式物料输送机设计148.潜孔钻气动冲击器设计149.液压绞车设计150.驱动小车设计151.机械毕业设计:起重梁设计152.单轨吊液压驱动葫芦设计153.单轨吊车液压泵站的设计154.单轨吊承载小车的设计155.轮式装载机工作装置设计156.CA6140杠杆加工工艺及夹具设计157.支承套零件的专用夹具设计158.推动架加工工艺规程设计159.铝线及CP送丝装置设计与典型零件数控加工160.数控龙门铣床立铣头部件设计161.输出轴工艺与工装设计162.气门摇臂轴支座加工工艺及夹具设计163.汽车空调器前缸盖数控加工工艺的制订及夹具设计164.机械毕业设计:塑料瓶理瓶机设计165.煤矿机械毕业设计:2×132/630-WD采煤机可调行走箱设计166.矿山毕业设计:300吨每小时煤粉带式输送机设计167.机械毕业设计:隔水管套内焊缝自动焊接装置设计168.机械毕业设计:HSG螺纹式连接液压缸结构设计169.毕业设计:HSG拉杆式液压缸结构设计170.大专机械毕业设计:自动采油系统地面提升绞车设计171.机械毕业设计:三坐标数控铣床设计172.机械毕业设计:物料传输颜色分拣系统设计173.毕业设计:4102机体主凸孔扩孔镗削加工夹具设计174.机械毕业设计:缸阀体的工艺分析及夹具设计175.机械毕业设计:凸轮轴零件工艺规程设计176.机械毕业设计:ZFG6600/17/32H型放顶煤液压支架设计177.机械毕业设计:绞盘机的减速机构设计178.机械毕业设计:CA6140下部刀架的工艺工装的设计179.大学机械毕业设计:机车凸轮轴工艺夹具设计180.机械毕业设计:汽车后桥壳体工艺夹具设计181.汽车毕业设计:奥迪A6自动变速器实验台电路设计182.机械毕业设计:轻型货车变速器设计183.机械毕业设计:三坐标数控铣床设计184.机械毕业设计:ZFG6600/17/32H型放顶煤液压支架设计185.本科机械毕业设计:CA6140开合螺母工艺工装设计186.机械毕业设计:汽车后桥壳体工艺夹具设计187.大学机械毕业设计:机车凸轮轴工艺夹具设计188.机械毕业设计:CA6140下部刀架的工艺工装的设计189.机械毕业设计:绞盘机的减速机构设计190.机械毕业设计:汽车变速器壳体工艺夹具设计191.机械毕业设计:CA6140方刀架工艺工装设计192.机械毕业设计:离心式水果榨汁机的机械设计193.机械毕业设计:铣床强力万能铣头设计194.机械毕业设计:果蔬原料去皮机的设计195.机械毕业设计:MG400-940采煤机摇臂减速箱设计196.机械毕业设计:活塞机械加工工艺规程及粗镗销孔夹具设计197.机械毕业设计:钢筋矫直切断机设计198.机械毕业设计:机械式钢筋钢管多功能加工机设计9.机械毕业设计:JTP-1.6×1.2矿用提升绞车主轴装置设计200.机械毕业设计:间歇式环保包装件成型设备设计201.煤矿机械毕业设计:大功率采煤机截割部的设计202.机械毕业设计:300/50KN单主梁龙门式起重机设计203.机械毕业设计:立式精锻机自动上料机械手大臂升降及回转机构设计204.机械毕业设计:立式浮动悬辊磨零部件优化设计205.机械毕业设计:智能机器狗结构设计206.机械毕业设计:车削中心机械部分设计207.机械毕业设计:圆锯床设计208.机械毕业设计:1吨单层全自动罐笼门设计209.机械毕业设计:NGW行星齿轮传动电动滚筒设计210.机械毕业设计:数控激光切割机设计211.机械毕业设计CTY8/6-PG 电机车的设计212.机械毕业设计:链驱动双层升降横移式立体车库设计。
工作台倾斜对角度测量的影响分析及应用

引用格式:戴雨辰, 沈小燕. 工作台倾斜对角度测量的影响分析及应用[J]. 中国测试,2023, 49(7): 9-15. DAI Yuchen, SHEN Xiaoyan. The analysis and application of influence of table tilt on angle measurement[J]. China Measurement & Test, 2023, 49(7): 9-15. DOI: 10.11857/j.issn.1674-5124.2022030130工作台倾斜对角度测量的影响分析及应用戴雨辰, 沈小燕(中国计量大学计量测试工程学院,浙江 杭州 310018)摘 要: 工作平台的倾斜会导致自准直仪在配合转台进行角度测量时产生测角误差,研究该倾斜引起的误差规律不仅对提高测角精度具有重要意义,还对实现测角仪器的标定具有参考价值。
论文首先基于三个状态参数(平面倾斜角θp 、反射面方位角θx 、反射面垂直度ϕ),通过齐次坐标变换推导建立转台配合自准直测角时由平台倾斜导致的误差数学模型;接着以模型中的θx 为自变量,在不同量级的θp 、ϕ的取值下仿真得到多组误差曲线,对比分析并总结该误差的分布规律;最后,基于该误差的特性提出一种自准直测角标定方法,分析表明,取反射面方位角θx = 90°时,该方法可实现每步大小为θp ·ϕ的角度改变量,是标定自准直仪的一种可行途径。
关键词: 计量学; 平台调倾; 测角误差; 自准直仪; 谐波分析中图分类号: TB922;TB9文献标志码: A文章编号: 1674–5124(2023)07–0009–07The analysis and application of influence of table tilt on angle measurementDAI Yuchen, SHEN Xiaoyan(College of Metrology and Measurement Engineering, China Jiliang University, Hangzhou 310018, China)Abstract : The tilt of worktable leads to a systematic angle error when autocollimator measures angles cooperating with a turntable. The research on this error not only is meaningful for improving the angle measurement accuracy, but also has referential value for realizing the calibration of angle measurement instruments. Firstly, based on the three state parameters (table tilt angle θp , mirror azimuth θx and mirror perpendicularity ϕ) and the principle of homogeneous coordinate transformation, this paper derives the mathematical model of the error caused by table tilt angle when the turntable measuring angles cooperating with an autocollimator Secondly, regarding θx as the independent variable, some groups of error curves are simulated with the different magnitudes of θp and ϕ. Comparison analysis and conclusion for the regularity of this curves are done. Finally, a method for angle calibration of autocollimator based on the nature of the error is proposed. The analysis indicates that this method realizes an angle variation θp ·ϕ each step when θx = 90°,which may be a feasibility way to calibrate autocollimator.Keywords : metrology; table tilt adjustment; angle measurement error; autocollimator; harmonic analysis收稿日期: 2022-03-21;收到修改稿日期: 2022-04-15基金项目: 国家自然科学基金面上项目(51875543);浙江省属高校基本科研业务费专项资金资助(2020YW03)作者简介: 戴雨辰(1996-),男,浙江台州市人,硕士研究生,专业方向为几何量测量。
端面磨床的使用及调整【超实用】
端面磨床是高精度端面加工设备,有着高强度机械构造和稳定的精度。
应用领域:液压气动元件、液压马达部件、汽车转向泵零部件、制冷压缩机零部件、油泵油嘴零部件、发动机零部件、高精密轴承、密封件、活塞环、量刃具、模具、仪表、硬质合金刀片、陶瓷阀芯、磁性材料等产品的双面研磨加工。
一、磨削区的选择所谓磨削区是指磨削工件的区域,也就是磨削工件的位置。
任何磨床都有它的磨削区,所以要根据所磨工件的技术要求来选定。
M8102磨削区尤为重要。
因为该机床来用轴向错位双侧面磨削。
外侧面与内侧面的线速度悬殊很大,为此,给使用者增加了一定的难度。
磨削区的选择,实际上就是砂轮在什么形状下工作的问题。
这是保证工件获得较好尺寸及粗糙度的关键。
根据机床生产厂家设计时的调整要求,应当上下磨头相互平行,上下修整器各自垂直于砂轮主轴。
存料台、中心工作台、接料台亦与砂轮主轴法兰盘相互平行。
此时用修整器修出的砂轮就是相互平行的。
整个的砂轮宽度就是工件的磨削区。
在这种状态下,加工出来的产品似乎是良好的,但实际上往往会出现以下问题。
1、由于上下砂轮的整个磨削面相互平行,整个砂轮的侧面宽度都是工件的磨削区。
由于没有引导角,因此进料就发生困难。
工件在进入磨削区时,是依靠无声链的机械传动推进的。
这就是说,工件在阻力很大的困难条件下被强行推入磨削区的。
这就出现了工件的振动,工件被顶起,且当工件接触砂轮时,工件下侧面没有受到磨削而上面边缘被上砂轮磨去数倍以上的磨削量,当工件进入磨区并被磨去整个磨削量后,工件上侧面边缘即因进料时被告削去一块成为缺陷。
2、因为整个砂轮区域皆为磨削区,当工件在出口时还仍然处于磨削状态。
此时由于上砂轮位于内边缘下砂轮位于外边缘,下砂轮外边缘的线速度比下砂轮内边缘的线速度高得多,这样,就造成工件两侧面粗糙度不一样,下侧面粗糙度高,上侧面粗糙度低。
3、还因为工件从进入砂轮到离开砂轮,都处于磨削状态,所磨出来的工件,尽管看上去磨削纹路呈螺旋状较为整齐,实际上磨纹很深,粗糙度较差。
国内外圆度
国内外圆度 /圆柱度仪对比介绍国内外的圆度/ 圆柱度仪生产厂家包括英国泰勒霍布森,德国马尔、日本三丰、德国霍梅尔、中国广州威尔信精密技术有限公司、中国中原量仪厂、中国上海研润光机科技有限公司以及洛阳轴研科技股份有限公司等。
上述厂家均有自己的圆度 /圆柱度仪系列产品,一些厂家的型号比较丰富,有针对小型精密工件的小型仪器,针对大型工件的重载仪器。
圆度/圆柱度仪的关键技术包括:主轴、立柱、横臂、采样系统、工作台、测头、测杆和评定软件。
下面对不同厂家仪器的上述参数进行列表对比。
主轴精度:主轴回转精度是圆度 /圆柱度仪最重要的一项技术指标,各个生产厂家均采用了高精密气浮静压轴承结构。
主轴精度包括两项技术指标,径向跳动和轴向窜动。
径向跳动是测量回转体零件圆周方向误差,如圆度、圆柱度、径向跳动等的重要保证,轴向窜动是测量面上误差,如平面度,的重要保证指标。
在查阅的资料中,仪器厂家均给出了主轴的径向误差,多数厂家没有给出轴向窜动的误差值。
厂家Talyor Hobson 日本三丰德国马尔中原量仪厂德国霍梅尔广州威尔信上海研润主轴精度径向轴向最高精度+/-(0.02 μm+0.0003μm/mm )+/-(0.02 μm+0.0003μm/mm )最低精度+/-(0.025 μm +0.00025μm/mm )0.025 μm径向轴向最高精度(0.02+3.8H/10000) mμ, H 为可测高度(0.02+3.8R/10000)mμ, R 为可测半径最低精度(0.07+6H/10000)μm,H为可测高度(0.02+6R/10000)mμ,R 为可测半径无数据 -径向最高精度(0.07+6H/1000 )μm最低精度0.5~0.10 μm径向±0.025 μm径向最高精度±0.0125 μm最低精度±0.035 μm径向最高精度±0.025 μm最低精度±0.035 μm立柱( Z 轴):立柱( Z 轴)技术指标是包括可测高度、立柱直线度、与主轴的平行度。
一种质量质心测量系统设计
关键词 : 静平衡 质量 质心 误 差分析 中 图分 类 号 : 6 . U4 7 4 文 献标 识码 : A
文 章编 号 : 6 2 7 1 2 1 ) 5 a-O 1 -0 1 7 -3 9 ( O 2 0 ( ) 0 2 4 将试 件 绕X 转 动9 , 轴 0。 使试 件O 轴 和 装 Z
随 着 现 代 飞 行 器 速 度 更 快 、 动 能 力 增 装 装 夹 机构 , 会 影 响 系 统 的测 量 精 度 , 机 不 更 强 的 发 展 趋 势 , 航 空 武 器 系 统 抗 过 载 以 便 于 满 足 不 同 被 测 件 的 测 量 要 求 。 对 能 力 的要 求也 在 不 断 提 高 。 大 过载 下 , 在 很 小 的 静 不 平衡 量都 可 能 使 航 空 武 器 的 稳 定
径 向质 心 测 量值 为 , 8 。 径 向质 心 测 10 时 鲫 在 。 。 8 ( ) 量 值 为 1 , O 和 1 0 时 的 总 质量 均 为 i
W, 则有 :
=
式中w为试 件 质量 , 、 、 w w,w 分别 为 1 , 2 3 点 处 传 感 器 的 实 测 值( 图 1 。 ,三 如 )
各 点 的 分 质 量 测 出后 , 据 力 和 力矩 根
(
W
. H: 一 )
() 5
平衡 原 理 在 平 面 o y 对 O x 内 X取 矩 , 件 在 试
o 平 面 内 的径 向 质心y 为 : xy
1
:
W
( . I Ⅵ H一 ) I H
( 6 ) 、一
求。
W
( ̄ 一 H: wH- )
( 4 ) 、’
式 中 , 分 别为 试 件 在9 。 态 时 l 0状 , 2 点处 传 感 器 的 实 测 值 。 两 为 了尽 量 消 除 传 感 器 定 位 不准 ( H. 即 、
微位移机构的现状及趋势
微位移机构的现状及趋势程颖【摘要】微位移机构是精密机械和精密仪器的关键部件之一。
介绍了一些典型的微位移机构的结构、原理、特点和应用, 并对这些机构进行了比较。
关键词: 微位移机构; 扭轮摩擦传动; 直线电机; 弹性变形; 柔性铰链; 压电陶瓷【 Abstract】The micro-motion mechanism is one of key components of precision machinery and precision instrument.Introducesstructure,principle,characteristics and applications of some typical the micro-motion mechanisms.The comparison among these mechanisms are carried out.Keywords: Micro- motion mechanism; Torsion wheel friction transmission; Linear motor ; Elastic deformation; Flexible hinge; Piezoelectric ceramic当前随着科学技术的迅速发展, 尤其是在微电子技术、宇航、材料、生物工程等学科的发展, 对精密机械和精密仪器的精度及灵敏度要求越来越高。
例如, 在材料学科中, 科学家们为了探测材料表面的原子结构, 甚至将其原子结构做重新排列, 对于相应的操作精度要求达到了亚纳米级。
[1]1 机械传动式微位移机构机械传动式微位移机构是一种最古老的机构, 在精密机械和仪器中应用很广, 其结构形式较多, 主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。
但因机构中存在机械间隙、摩擦磨损以及爬行现象等, 所以运动灵敏度和精度都很难达到高精度, 所以该机构只适宜于中等精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种高精度自动调平工作台设计
作者:罗振元田育民马小辉
来源:《现代电子技术》2010年第05期
摘要:介绍一种高精度自动调平工作台。
该工作台由电子水准器、控制系统、伺服电机等构成,用于工作台的水平检测。
执行机构选用伺服电机,控制系统以ARM微处理器作为核心。
通过构建的“三点法”调平控制模型,实现对工作台面的高精度自动调平。
给出自动调平的控制数学模型、硬件构成和控制方法,在实际应用中已取得较好的效果。
关键词:调平;电机;电子水准器;ARM
中图分类号:TP29文献标识码:A
文章编号:1004-373X(2010)05-107-03
Design of Working Platform with High Precision Automatic Self Leveling
LUO Zhenyuan1,TIAN Yumin2,MA Xiaohui2
(1.Xi′an University of Arts and Science,Xi′an,710054,China;2.Xi′an Research Institute of Surveying and Mapping,Xi′an,710054,China)
Abstract:The working platform with a high precision automatic self leveling is introduced.This platform consists of electronic water leveler,control system and servo motors.The gradient is applied to ascertain whether the working platform′s surface is horizontal or not.The servo motor is used.The control system based on ARM adopts the ″three-point″ leveling principle model to achieve automatic leveling of the high precision.The mathematical model,hardware and control method of self leveling are given,good results are gained
Keywords:leveling;motor;electronic water level;ARM
0 引言
在现代国防与民用技术中,常常需要把某些设备精确地调整到水平位置,以提高系统的工作性能,达到某一指标要求。
如利用测绘仪器进行工程测量时,常常需要对测绘仪器进行调平对中。
测绘仪器调平时,通过水准器检测仪器的水平状态,采用“三点法”,依靠人工作业完成,这种方法耗时长,调平精度差。
本文设计了一种高精度、低成本的自动调平工作台。
该工作台的控制系统采用精密电子水准器作为水平传感器检测工作台面的水平状态,采用PWM输出信号控制调平电机,对工作台面进行调平,并利用ARM微处理器进行闭环控制,实现工作台面的自动调平。
1 系统的工作原理
自动调平工作台具有A,B,C三个调整脚,平台台面可在三个调整脚上平动,如图1所示。
将平台投影在水平面上,A,B,C点构成等边三角形。
如将A调整脚的高低位置固定,调整B调整脚,使AB边处于水平状态;调整C调整脚,使AC边处于水平状态;当AB,BC,CA为刚性连接,AB,AC 为两条直线水平时,则平台处于水平状态。
图1 自动调平工作台示意图
1.1 水平检测
本系统采用高灵敏度电子水准器作为水平检测传感器。
该电子水准器基于差动电容原理,依据其输出电容值的大小测量平台倾斜度。
当电子水准器处于水平位置时,其输出差动电容值为零,检测的水平精度可达2″。
将电子水准器作为水平传感器按图1所示的方向安装于平台上,即可对平台进行实时检测。
水平传感器的输出含有A-C和A-B两个方向的信号。
Ⅰ号水平传感器输出值为正时,表明A位置高于C位置;Ⅰ号水平传感器输出值为负时,表明A位置低于C位置。
同理,Ⅱ号水平传感器为正时,表明A位置高于B位置;为负时,表明A位置低于B位置。
若ⅠⅡ号水平传感器的输出都为0,则可认为平台已处于水平状态。
1.2 控制数学模型
数学模型主要是得到水平倾角θ1,θ2与各调整脚位移之间的函数关系,如图2所示。
当某一瞬时平台位置为AB′C′,平台调平时台面位置为ABC时,Ⅰ号水平传感器输出倾角值为
θ1,Ⅱ号水平传感器输出倾角值为θ2。
为了简化工程运算,在θ1,θ2较小时,根据几何关系可
知,B,C调整脚的位移为:
(1)
图2 数字模型
在水平传感器精度、平台加工精度一定的情况下,平台水平误差的大小与水平传感器的位置有一定关系,“三点法”调平的水平误差可根据水平传感器检测的倾角θ1,θ2合成为:
θ=θ21+θ22-
(2)
式中:α为两个水平传感器之间的夹角。
如果θ1,θ2的检测精度为±δ,则“三点法”调平的水平误差为:
-
(3)
1.3 水平调节
调整脚的执行机构采用PWM模式驱动的直流伺服电机。
直流电机选择用Maxon的产品,并配合减速箱,以满足调平驱动力和精度的要求。
电机控制采用PID控制。
模拟PID控制系统原理如图3所示。
图3中,r(t)是给定值;y(t)是系统的实际输出值;p(t)为反馈值;u(t)是PID控制器的输出量,也是被控对象的输入量;e(t)=r(t)-u(t)为给定值与反馈值构成的控制偏差。
模拟PID控制器的控制规律为:
〗+u0
(4)
式中为比例系数为积分常数为微分常数;u0为控制常量的初始值。
由于计算机控制是一种采样控制,必须对模拟控制模型进行离散化处理。
以T作为采样周期,k作为采样序号,则离散采样时间KT对应着连续时间t,用求和的形式代替积分,用增量的形式代替微分,即可得到离散的PID控制模型为:
-ek-1)〗+u0
(5)
式中:k为采样序号,k=0,1,2,…;uk为第k次采样时刻计算机的输出值;ek为第k次采样时刻输入的偏差值;ek-1为第k-1次采样时刻输入的偏差值。
图3 控制系统原理图
2 硬件设计
本系统由两个电子水准器、电容数字转换器AD7745[6]、基于ARM7内核的LPC2131微控制器[7]、功率放大器、直流电机组成,如图4所示。
两个电子水准器检测工作平台的水平状态,以电容输出值的不同表示台面的水平程度。
电容数字转换器AD7745将电子水准器的量测电容以差分形式作为输入,转换成数字信号。
LPC2131微控制器采集AD7745输出的数字信号,通过特定的算法处理,利用自带的PWM信号输出控制L298N的输出电压,从而驱动电机运转,达到自动调平的设计目的。
图4 系统硬件结构图
3 软件设计
如图5所示,系统软件包括LPC2131和AD7745初始化、电子水准器的数据采集、控制模型的数据处理和电机控制信号的输出四个部分。
根据离散化思想,把调平过程分解为若干个追踪周期。
每一个追踪周期包括数据采集、数据处理和输出控制。
每经过一个追踪周期,平台向水平平面靠近一些,逐渐逼近水平,即每经过一个追踪周期,平台平面与水平面的夹角逐渐变小,直至趋近于零。
数据采集:以I2C标准接口采集经电容数字转换器AD7745转换后的电子水准器输出电容值。
数据处理:对采集的数据进行转换和处理,判断应调整直流电机Ⅰ还是直流电机Ⅱ;是向上调整还是向下调整,并对调整范围给出量化数据。
输出控制:根据数据处理结果,编程控制LPC2131的PWM相关寄存器,控制电机运转。
图5 软件流程图
4 结语
(1) 由于采用电容数字转换器AD7745的分辨率可达4 aF,并内置有温度传感器,使得电子水准器的检测精度可达2″。
(2) 由于构建的控制模型合理,在选用带减速机构的Maxon高精度伺服电机配合下,保证了自动调平工作的安平精度在5″以内。
参考文献
[1]金钰,胡祐德,李向春.伺服系统设计指导[M].北京:北京理工大学出版社,2000.
[2]李铁才,杜坤梅.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2000.
[3]程鹏.自动控制原理[M].北京:高等教育出版社,2003.
[4]包松,鲍可进,余景华.基于单片机PID算法的直流电机测控系统[J].微机发
展,2003,13(8):72-74.
[5]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[6]郭强,谢康,姜海明,等.电容数字转换器AD7745的工作原理和应用[J].现代电子技
术,2008,31(14):170-172.
[7]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005.
[8]Andrew N Sloss,Dominic Symes,Chris Wright.ARM嵌入式系统开发:软件设计与优化[M].沈建华,译.北京:北京航空航天大学出版社,2005.
[9]张大明.单片微机控制应用技术[M].北京:机械工业出版社,2006.
[10]海心,赵华.机电转动控制[M].北京:高等教育出版社,2007.。