机械设计课后习题第5章作业知识分享
机械设计第五章训练题.docx
第五章5-1选择题与填空题1.若螺纹的直径和螺旋副的摩擦系数一定,则拧紧螺母时的效率取决于螺纹的________ OA.螺距和牙形角B.升角和头数C.导程和牙形斜角D.螺距和升角2.采用普通螺栓连接的突缘联轴器,在传递扭矩时,_______ oA.螺栓的横截面受剪切B.螺栓与螺栓孔配合面受挤压C.螺栓同时受挤压和剪切D.螺栓受拉伸和扭转作用3. ________________________________________________ 螺旋副的自锁条件是=4.在常用的螺纹联接中,自锁性能最好的螺纹是()。
A、三角形螺纹B、梯形螺纹C、锯齿形螺纹D、矩形螺纹5.相同公称尺寸的三角形细牙螺纹和粗牙螺纹相比,因细牙螺纹的螺距小,故细牙螺纹_______ -A.自锁性好,强度低B.自锁性好,强度高C.自锁性差,强度高D.自锁性差,强度低6.三角螺纹的牙型角a= _____ ,适用于_________ ;而梯形螺纹的牙型角a=_____ ,适用于_________ o7.在下列三种具有相同公称直径和螺距,并采用相同材料配对的螺旋副中,传动效率最高的是一。
A.单线矩形螺旋副B.单线梯形螺旋副C.双线矩形螺旋副&当两个被联接件之一太厚,不易制成通孔,且联接不需要经常拆卸时,往往采用__________ 。
A.螺栓联接B.螺钉联接C.双头螺柱联接D.紧定螺钉联接9.受轴向工作载荷F的紧螺栓联接,螺栓所受的总拉力F2等于____________ 和 _____________之和。
10.按防松的原理不同,螺纹联接分为_________ 、___________ 和___________ o11.螺纹联接防松的实质是_______________________ O12.螺纹联接防松的根本问题在于()。
A、增加螺纹联接的轴向力B、增加螺纹联接的横向力C、防止螺纹副的相对转动D、增加螺纹联接的刚度13.普通螺栓受横向工作在荷时,主要靠来承担横向载荷。
西北工业大学机械原理课后答案第5章

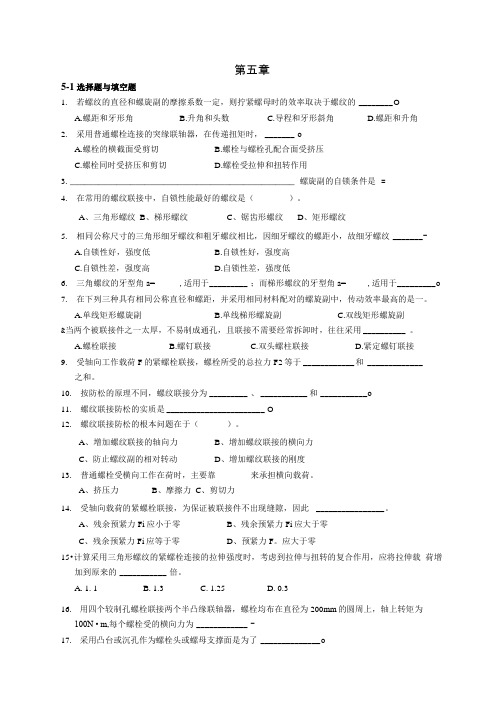
第五章 机械的效率和自锁题5-5解: (1)根据己知条件,摩擦圆半径 m r f v 002.001.02.0=⨯==ρ ︒==53.8arctan f φ 计算可得图5-5所示位置︒=67.45α ︒=33.14β (2)考虑摩擦时,运动副中的反力如图5-5所示。
(3)构件1的平衡条件为:()ρα2sin 211+=AB R l F M()[]ρα2sin 2321+==AB R R l M构件3的平衡条件为:034323=++R R 按上式作力多边形如图5-5所示,有()()φβφ--︒=+︒90sin 90sin 323F F R(4)()()()φραφβφφβcos 2sin cos cos 90sin 1233++=--︒=AB R l M F F ()αβs i n c o s 130AB l M F = (5)机械效率:()()91.09889.09688.007553.09214.007153.0cos cos 2sin cos sin 303=⨯⨯⨯=++==φβραφβαηAB AB l l F FF R 12F R 41图5-5F F R 21F R43题5-2解: (1)根据己知条件,摩擦圆半径 22vf d =ρ 11a r c t a n f =φ 22a r c t a n f =φ 作出各运动副中的总反力的方位如图5-2所示。
(2)以推杆为研究对象的平衡方程式如下:∑=0xF 0cos cos sin 232132112=''-'+φφφR RR F F F ∑=0yF0sin sin cos 232132112=''-'--φφφR RR F F G F ∑=0CM()0c o s c o s s i n c o s 2s i n 1122232232112=⋅⋅-⋅''+⋅''+++θφφφφe F d F l F d Gl b F R R R R(3)以凸轮为研究对象的平衡方程式如下:h F M R ⋅=12 ()11cos tan sin cos φφθθρe r e h +++=(4)联立以上方程解得()[]21tan cos 21tan sin cos φθφθθρle e r e G M -+++=θc o s 0Ge M = ()()120tan sin cos tan cos 21cos φθθρφθθηe r e c l e e M M +++-==讨论:由于效率计算公式可知,φ1,φ2减小,L 增大,则效率增大,由于θ是变化的,瞬时效率也是变化的。
机械设计第5章

7、 其它螺纹 主要用于金属薄板的连接
三、螺纹联接的基本类型:分松联接和紧联接
1)螺栓联接
受拉螺栓联接(普通螺栓联接) 受剪螺栓联接(铰制孔用螺栓联接)
2)双头螺柱联接
3)螺钉联接
4)紧定螺钉联接
螺栓、螺柱、螺钉、螺母等称为螺纹联接件。在机械制造中常 用螺纹联接件的结构型式和尺寸都已经标准化,设计时可以根据有 关标准选用。
第二篇
联接
引言
联接
由于使用、结构、制造、装配、运输等方面的原因,机器中很 多零件需要彼此联接。 机械零件之间的联接分为:
静联接: 被联接件之间相互完全固定。
动联接: 被联接件之间能产生一定的相对运动。例如:运动副。
本课程介绍的联接主要是静联接。
联接的类型:
可拆联接
联接
过盈联接
不可拆联接
螺纹联接
键联接、花键联接、销联接
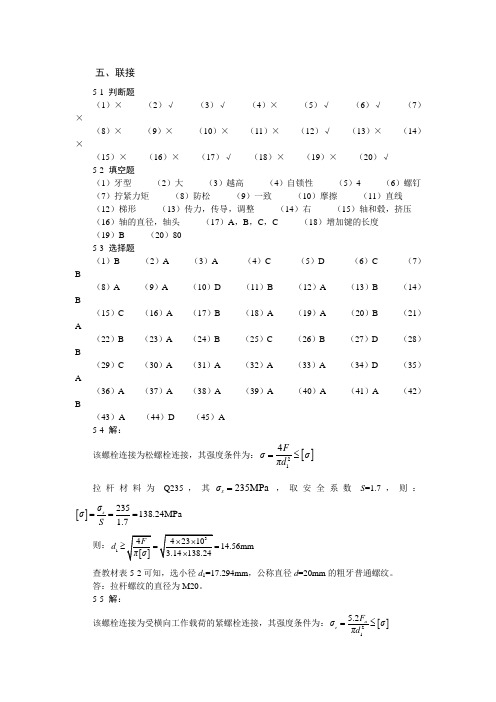
T1 T2
Ft
d2 2
F '•
F ' tan(y
1
D13
d
3 0
3
D12
d
2 0
v )
d2 2
升角:y
arctan nP
d2
当量摩擦角:v 自锁条件:y v
arctan
cos
效率:=
tany
tany
v
5)
因此, T
T1
T2
1 2
d2 d
tan(y
v)
2
3d
•
D13 D12
d
3 0
§2 拧紧和防松
❖ 预备知识:
1)
螺纹力矩:
T1
Ft
d2 2
F ' tan(y
机械设计基础第五章答案
五、联接5-1 判断题(1)× (2)√ (3)√ (4)× (5)√ (6)√ (7)×(8)× (9)× (10)× (11)× (12)√ (13)× (14)×(15)× (16)× (17)√ (18)× (19)× (20)√ 5-2 填空题(1)牙型 (2)大 (3)越高 (4)自锁性 (5)4 (6)螺钉 (7)拧紧力矩 (8)防松 (9)一致 (10)摩擦 (11)直线 (12)梯形 (13)传力,传导,调整 (14)右 (15)轴和毂,挤压 (16)轴的直径,轴头 (17)A ,B ,C ,C (18)增加键的长度 (19)B (20)80 5-3 选择题(1)B (2)A (3)A (4)C (5)D (6)C (7)B(8)A (9)A (10)D (11)B (12)A (13)B (14)B(15)C (16)A (17)B (18)A (19)A (20)B (21)A(22)B (23)A (24)B (25)C (26)B (27)D (28)B(29)C (30)A (31)A (32)A (33)A (34)D (35)A(36)A (37)A (38)A (39)A (40)A (41)A (42)B(43)A (44)D (45)A 5-4 解:该螺栓连接为松螺栓连接,其强度条件为:[]214Fσσπd =≤ 拉杆材料为Q235,其235M P s σ=,取安全系数S =1.7,则:[]235138.24MPa 1.7s σσS === 则:114.56mm d = 查教材表5-2可知,选小径d 1=17.294mm ,公称直径d =20mm 的粗牙普通螺纹。
答:拉杆螺纹的直径为M20。
5-5 解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2ae F σσπd =≤0Ra CF F F zmf=≥,查教材表5-2可知,M16的螺栓的小径d 1=13.835mm 。
机械设计第五章

机械设计第五章1. 引言机械设计是现代工程领域中非常重要的一门学科。
它主要研究物体在外力作用下的形态和结构变化规律,以及如何选择和设计合适的构件以达到设计目标。
在机械设计的过程中,第五章是一个重要的环节。
本文将重点讨论机械设计第五章的内容,包括材料的选择、连接装置的设计、摩擦和润滑等方面。
2. 材料的选择在机械设计中,材料的选择是一个至关重要的环节。
合适的材料可以提供所需的强度、刚度、耐磨性等特性,从而保证机械系统的正常运行。
在第五章中,我们需要了解不同材料的性质和特点,以便选择合适的材料。
常见的机械材料包括钢、铝合金、塑料等。
钢具有较高的强度和刚度,适用于承受大力和重载的场合。
铝合金则具有较低的密度和良好的加工性能,适用于减少结构重量的要求。
塑料则具有良好的耐腐蚀性和绝缘性,适用于一些特殊环境下的使用。
在选择材料时,需要考虑机械系统的工作环境、受力情况和预算等因素。
通过综合考虑各种因素,选择合适的材料可以提高机械系统的性能和使用寿命。
3. 连接装置的设计连接装置在机械设计中起着关键作用。
它是将不同构件连接在一起,使机械系统能够正常工作的重要组成部分。
在第五章中,我们需要了解不同类型的连接装置以及它们的特点和应用。
常见的连接装置包括螺栓连接、焊接、铆接等。
螺栓连接适用于需要拆卸和调整的场合,它有着可靠的连接性能和方便的操作性。
焊接是通过熔化材料使构件相互连接的方法,它可以提供较高的强度和刚度,适用于需要承受大力的场合。
铆接则是通过将铆钉锤击到构件上使其连接的方法,它可以提供较高的连接强度和疲劳寿命,适用于需要承受振动和冲击的场合。
在设计连接装置时,需要考虑连接性能、安全性和方便性等因素。
合理选择连接装置可以提高机械系统的可靠性和使用寿命。
4. 摩擦和润滑摩擦和润滑是机械设计中一个重要的考虑因素。
摩擦会导致能量损耗和磨损,而润滑可以减小摩擦和磨损,从而提高机械系统的效率和使用寿命。
在第五章中,我们需要了解不同材料之间的摩擦特性和如何选择合适的润滑材料。
机械原理第五章习题答案
第五章 机械的效率与自锁习题5-6取长度比例尺mm m l 005.0=μ,力比例尺mmN F 20=μ。
由题可知: 摩擦圆半径mm r f v 1101.0=⨯==ρ,移动副的摩擦角053.815.0arctan arctan ===f ϕ 作有摩擦时的力矢量图可得N l M F l I I R 15.2725698.1420000112=⨯==μ,I R I R F F 3223=,N l F F F I 48.25320674.12=⨯==μ 作无摩擦的力矢量图可得N l M F l II II R 6.2795308.1420000112=⨯==μ,II R II R F F 3223=,N l F F F II 86.27020543.13=⨯==μ 效率%58.9386.27048.253===I II F F η习题5-8解:运输带的工作功率为w Fv N r 66002.15500=⨯==由于各环节是串联,总效率为平带传动效率、两对齿轮传动效率和运输带传动效率之积,因此有822.092.097.095.023221=⨯⨯==ηηηη 电机所需功率为w N N r d 8029822.06600===η因此该机械选择8kw 的电机即可。
习题5-9解:从电机到A 、B 间齿轮是串联,因此其间传动效率为892.092.097.031=⨯==ηηηs锥齿轮处需要的功率为kw P P N B BA A s 505.897.015.018.0511=⎪⎭⎫ ⎝⎛+=+=ηηηη 则电机的功率为 kw N N s s d 53.9892.0505.8===η该机械选择10kw 的电机即可。
习题5-11解:1)正行程时,对于滑块2,在三个力作用下保持平衡,因此有04212=++R R s F F F根据三解形正弦定理,有()[]()()ϕαϕαϕα-=⇒-=-sin 2cos 2sin 1212s R R s F F F F ()[]()()ϕαϕαϕα-=⇒-=--cos 2sin 2180sin 21210F F F F R R 由上两式可得()ϕα-=ctg F F s由于正行程时,力F 为驱动力,在无摩擦状态下,理想驱动力αctg F F s =0 所以效率为()αϕαηF F -==tan 0自锁条件为:ϕαη≤⇒≤02)反行程时,构件2同样三力作用下平衡,如图所示()[]()()ϕαϕαϕα+=⇒+=+sin 2cos 2sin 1212s R R s F F F F ()[]()()ϕαϕαϕα+=⇒+=+-cos 2sin 2180sin 21210F F F F R R 由上两式可得()ϕα+=ctg F F s由于反行程时,s F 为驱动力,而F 为阻力,在无摩擦状态下,理想阻力αctg F F s =0 所以效率为()ϕααη+==F F tan 0自锁条件为:0900≥+⇒≤ϕαη,而ϕα-<090时不自锁。
机械设计作业第5答案之欧阳家百创编
第五章螺纹联接和螺旋传动欧阳家百(2021.03.07)一、选择题5—1 螺纹升角ψ增大,则联接的自锁性C,传动的效率A;牙型角增大,则联接的自锁性A,传动的效率C。
A、提高B、不变C、降低5—2在常用的螺旋传动中,传动效率最高的螺纹是 D 。
A、三角形螺纹B、梯形螺纹C、锯齿形螺纹D、矩形螺纹5—3 当两个被联接件之一太厚,不宜制成通孔,且需要经常装拆时,往往采用 A 。
A、双头螺柱联接B、螺栓联接C、螺钉联接D、紧定螺钉联接5—4螺纹联接防松的根本问题在于C。
A、增加螺纹联接的轴向力B、增加螺纹联接的横向力C、防止螺纹副的相对转动D、增加螺纹联接的刚度5—5对顶螺母为A防松,开口销为B防松,串联钢丝为B防松。
A、摩擦B、机械C、不可拆5—6在铰制孔用螺栓联接中,螺栓杆与孔的配合为B。
A、间隙配合B、过渡配合C、过盈配合5—7在承受横向工作载荷或旋转力矩的普通紧螺栓联接中,螺栓杆C作用。
A、受剪切应力B、受拉应力C、受扭转切应力和拉应力D、既可能只受切应力又可能只受拉应力5—8受横向工作载荷的普通紧螺栓联接中,依靠A来承载。
A、接合面间的摩擦力B、螺栓的剪切和挤压C、螺栓的剪切和被联接件的挤压5—9受横向工作载荷的普通紧螺栓联接中,螺栓所受的载荷为B;受横向工作载荷的铰制孔螺栓联接中,螺栓所受的载荷为A;受轴向工作载荷的普通松螺栓联接中,螺栓所受的载荷是A;受轴向工作载荷的普通紧螺栓联接中,螺栓所受的载荷是D。
A、工作载荷B、预紧力C、工作载荷+预紧力D、工作载荷+残余预紧力E、残余预紧力5—10受轴向工作载荷的普通紧螺栓联接。
假设螺栓的刚度C b与被联接件的刚度C m相等,联接的预紧力为F0,要求受载后接合面不分离,当工作载荷F等于预紧力F0时,则D。
A、联接件分离,联接失效B、被联接件即将分离,联接不可靠C、联接可靠,但不能再继续加载D、联接可靠,只要螺栓强度足够,工作载荷F还可增加到接近预紧力的两倍5—11重要的螺栓联接直径不宜小于M12,这是因为C。
机械原理习题及答案:第5章--连杆
B
31 1
2
32
θ
B1 1 1 4
A
12
ω
B2
2
21
2
C
(b)
5-12 如图为开槽机上用的急回机构。原动件 BC 匀速转动,已知 a = 80mm , b = 200mm ,
l AD = 100mm , l DF = 400mm 。
(1) 确定滑块 F 的上、下极限位置; (2) 确定机构的极位夹角; (3) 欲使极位夹角增大,杆长 BC 应当如何调整?
5-21 设计一个偏心曲柄滑块机构。已知滑块两极限位置之间的距离 C1C 2 =50 ㎜,导路的偏 距 e=20 ㎜,机构的行程速比系数 K=1.5。试确定曲柄和连杆的长度 l AB , l BC 。
B A C2 C1
题图 5-21 解:行程速比系数 K=1.5,则机构的极位夹角为
e
θ = 180°
C B A D
5-10 图中的四杆闭运动链中,已知 a = 150mm , b = 500mm , c = 300mm , d = 400mm 。欲设计一个铰链四杆机构,机构的输入运动为单向连续转动,确定在下列 情况下,应取哪一个构件为机架?①输出运动为往复摆动;②输出运动也为单向连续转动。
解:① 当输出运动为往复摆动时,机构应为曲柄摇杆机构,此时应取四杆中最短杆的相邻 杆,即 b 或 d 作为机架。 ② 当输出运动也为单向连续转动时, 机构应为双曲柄机构, 此时应取四杆中的最短杆, 即 a 作为机架。 5-11 在图 a、b 中, (1) 说明如何从一个曲柄摇杆机构演化为图 a 的曲柄滑块机构、再演化为图 b 的摆 动导杆机构; (2) 确定构件 AB 为曲柄的条件; (3) 当图 a 为偏置曲柄滑块机构,而图 b 为摆动导杆机构时,画出构件 3 的极限位
杨可桢《机械设计基础》(第6版)复习笔记及课后习题详解(含考研真题)-第5~9章【圣才出品】
11 / 93
图 5-2-8
解:取其中一组作分析,齿轮 3、4 为中心轮,齿轮 2 为行星轮,构件 1 为行星架。这
里行星轮 2 是惰轮,因此它的齿数 z2 与传动比大小无关,可自由选取。可得
i3H4
n3 n4
nH nH
z4 z3
由图 5-2-8 可知 n4=0。又十字架 1 回转时挖叉却始终保持一定的方向,有 n3=0,则
二、定轴轮系及其传动比(见表 5-1-2) 表 5-1-2 定轴轮系及其传动比
1 / 93
三、周转轮系及其传动比(见表 5-1-3)
表 5-1-3 周转轮系及其传动比
2 / 93
四、复合轮系及其传动比 1.传动比求解思路 (1)区分基本周转轮系和定轴轮系; (2)根据各基本轮系之间的关系,联立方程式求解。
8 / 93
图 5-2-5
解:由题意可得
i1H3
n1H n3H
n1 nH n3 nH
z3 z1
又因为 n3=0,故
i1H
n1 nH
1 i1H3
1
z3 z1
4
当手柄转过 90°时,转盘 H 转过的角度为 90°/4=22.5°,方向与手柄方向相同。
5-5 在图 5-2-6 所示手动葫芦中,S 为手动链轮,H 为起重链轮。已知 z1=12,z2 =28,z2′=14,z3=54,求传动比 iSH。
齿数应满足条件 z4=z3,且与 z2 无关。
2.找基本周转轮系的一般方法 (1)先找出行星轮,即找出那些几何轴线绕另一个齿轮的几何轴线转动的齿轮; (2)再找行星架,支持行星轮运动的构件就是行星架; (3)最后找中心轮,几何轴线与行星架的回转轴线相重合,且直接与行星轮相啮合的 定轴齿轮就是中心轮。 (4)区分出各个基本周转轮系以后,剩下的就是定轴轮系。
机械制造装备设计课后习题答案 第三版 机械工业出版社
第五章课后习题答案1机床夹具的作用是什么?有哪些要求?作用:1、保证加工精度2、提高生产率3、扩大机床的使用范围4、减轻工人的劳动程度,保证生产安全5、降低成本要求:1、保证加工精度2、夹具的总体方案应与生产纲领相适应3、安全、方便、减轻劳动强度4、排屑顺畅5、夹具应有良好的刚度、强度、结构工艺性1.机床夹具的组成部分有哪些?1、定位元件及定位装置用于确定工件正确位置的元件或装置2、夹紧元件及夹紧装置用于固定工件已获得的正确位置的元件或装置3、导向及对刀元件用于确定工件与刀具的相互位置的元件4、动力装置5、夹具体用于将各元件、装置连接在一块,并通过它将整个夹具安装在机床上6、其它元件及装置3.何为六点定位原理?何谓定位的正常情况和非正常情况?它们各包括哪些方面?六点定位原理:采用六个按一定规则布置的约束点,限制工件的六个自由度使工件实现完全定位。
正常情况:根据加工表面的位置尺寸要求,需要限制的自由度均已被限制,称定位的正常情况。
正常情况分为:a完全定位六个自由度全部被限制b不完全定位少于六个自由度被限制非正常情况:根据加工表面的位置尺寸要求,需要限制的自由度没有完全被限制,或某个自由度被两个或两个以上的约束重负限制,称为非正常情况非正常情况分为:a.欠定位需要限制的自由度没有完全被限制b.过定位某个自由度被两个或两个以上的约束重负限制4、确定夹具的定位方案时,要考虑哪些方面的要求?在多个表面参与定位时:限制自由度最多的定位面——第一定位基准面或主基准面限制自由度较多的定位面——第二定位基准面或导向基准限制一个自由度的定位面——第三定位基准面或定程基准5、何谓定位误差?定位误差是由哪些因素引起的?定位误差:指工序基准在加工方向上的最大位置变动量所引起的加工误差,它是加工误差的一部分产生定位误差的原因:1、基准不重合带来的定位误差2、间隙引起的定位误差3、与夹具有关的因素产生的定位误差6、夹紧和定位的区别?对夹紧装置的基本要求有哪些?定位是确定工件在机床上或夹具中占有正确位置的过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
此文档仅供收集于网络,如有侵权请联系网站删除 只供学习与交流 第5章作业 5-l 眼镜用小螺钉(Ml x 0.25)与其他尺寸螺钉(例如M8 x 1.25)相比,为什么更易发生自动松脱现象(§纹中径=螺纹大径-O.65 x螺距)?
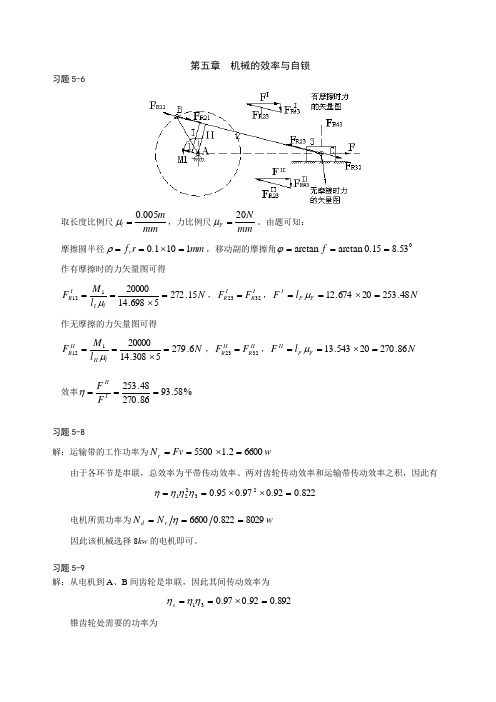
答:因为螺纹升角:2tan(0.65)ttddt 而眼镜用小螺钉的螺纹升角比其他尺寸螺钉大,自锁性差,所以更易发生自动松脱现象。 5-2 当作用在转动副中轴颈上的外力为一单力,并分别作用在其摩擦圆之内、之外或相切时,轴颈将作种运动?当作用在转动副中轴颈上的外力为一力偶矩时,也会发生自锁吗? 答:当作用在转动副中轴颈上的外力为一单力,并分别作用在其摩擦圆之内发生自锁,轴不能运动;作用在其摩擦圆之外或相切时,轴颈将转动。当作用在转动副中轴颈上的外力为一力偶矩时,不会发生自锁。 5-3 自锁机械根本不能运动,对吗?试举2,-3个利用自锁的实例。 答:不对,因为自锁机械对应于一定的外力条件和方向才自锁。 5-4 通过对串联机组及并联机组的效率计算,对设计机械传动系统有何重要启示? 答:应尽可能的提高串联机组中任意机构,减少的效率串联机组中机构的数目。在并联机组部分着重提高传递功率大的传动路线的效率。 5-5 图示曲柄滑块机构中,曲柄1在驱动力矩M1作用下等速转动。设已知各转动副的轴颈半径r=10mm,当量摩擦系数fv=0.1,移动副中的滑块摩擦系数f=0.15,lAB=100 mm,lBC=350 mm。各构件的质量和转动惯量略而不计。当M1=20 N.m时,试求机构在图示位置所能克服的有效阻力F3及机械效率。
解:(1)根据已知条件fvr=0.1ⅹ10=1mm φ=arctanf=8.53º 计算可得图示位置α=45.67º, β=14.33º (2)考虑摩擦时,运动副中反力如图(a)所示 (3)构件1的平衡条件为:FR21(lABsinα+2ρ)=M1 FR21=FR23=M1/[(lABsinα+2ρ)] 构件3的平衡条件为:FR23+FR43+f3=0
作力的多边形图(b)有:233sin(90)sin(90)RFF (4)2313coscos93.64%cos()(sin2)cos()RABFMFl (5)机械效率:330cossincos270.38(sin2)cos()ABABFlNFl
5-6图示为一带式运输机, 由电动机1经平带传动及一个两级齿轮减速器带动运输带8。设已知运输带8所需的曳引力F=5 500 N,运送速度v=1.2 m/s。平带传动(包括轴承)的效率η1=0.95,每对齿轮(包括其轴承)的效率η2=0.97,运输带8的机械效率η3=0.92(包括其支承和联轴器)。试求该系统的总效率η及电动机所需的功率。 此文档仅供收集于网络,如有侵权请联系网站删除 只供学习与交流 解:该系统的总效率为:η=η1.η22.η3=0.95ⅹ0.972ⅹ0.92=0.822 电机所需功率:N=Pv/η=5500ⅹ1.2ⅹ10-3/0.822=8.029kW 5-7如图所示,电动机通过v带传动及圆锥、圆柱齿轮传动带动工作机A及B。设每对齿轮的效率可η1=0.97(包括轴承的效率在内),带传动的效率η3=0.92,工作机A、B的功率分别为PA=5 kW、PB=1kW,效率分别为ηA=0.8、ηB=0.5,试求电动机所需的功率。
解::输入功率 PA`=PA/(ηAη12η2)=7.22kW PB`=PB/(ηBη12η2)=2.31kW 电机所需功率 P电=PA`+PB`=9.53kW 5-8图(a)示为一焊接用的楔形夹具。利用这个夹具把两块要焊接的工件1及1’预先夹妥,以便焊接。图中2为夹具体,3为楔块。试确定其自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)。
解一:根据反行程时η`≤0的条件确定 反行程时(楔块3退出)取楔块3为脱离体,其受工件1, 1`和夹具2作用的总反力FR13和以及支持力P。各力方向如图(a)(b)所示,根据楔块3的平衡条件,作矢量三角形如图(c).由正弦定理可得FR23=Pcosφ/sin(α-2φ) , φ=0,FR230=P/sinα
于是此机构反行程的效率为`23023sin2cossinRRFF 令 η`≤0, 可得自锁条件为α≤2φ 解二:根据反行程生产阻力小于或等于零的条件来确定 根据楔块3的力多边形图(c)由正弦定理可得P=FR23sin(α-2φ)/cosφ 若滑块不自动松脱,则应使P≤0,即得自锁条件为α≤2φ 解三:根据运动副的自锁条件确定。由于工件被夹紧后P力就被撤消,故楔块3受力如图(b)楔块3就如同受到FR23(此时为驱动力)作用而沿水平面移动的滑块。故只要作用在此文档仅供收集于网络,如有侵权请联系网站删除 只供学习与交流 摩擦角φ内,楔块3即发生自锁。即α-φ≤φ因此可得自锁条件为α≤2φ
图b为一颚式破碎机,在破碎矿石时要求矿石不致被向上挤出,试问α角应满足什么条件?经分析可得出什么结论?
解:设矿石的重量为Q,矿石与鄂板间的摩擦系数为f,则摩擦角为:φ=arctanf (b) 矿石有向上挤出趋势时,其受力如图(b)所示,由力平衡条件知: 2FRsin(α/2-φ)-Q=0 FR=Q/[2FRsin(α/2-φ)] η`=FR0/FR=sin(α/2-φ)/sin(α/2) 当η`≤0时,即α/2-φ≤0矿石将不被挤出,即自锁条件为α≤2φ 5-9图示为一超越离合器,当星轮1沿顺时针方向转动时,滚柱2将被楔紧在楔形间隙中,从而带动外圈3也沿顺时针方向转动。设已知摩擦系数f=0.08,R=50 mm,h=40 mm。为保证机构能正常工作,试确定滚柱直径d的合适范围。 提示:在解此题时,要用到上题的结论。(答:9.424 mm
解:解 如图所示,过滚柱2与外圈3的接触线的公切面.将形成夹角α的楔形面。由题的结论知。凡具有楔形面或楔形块的机构其楔紧不松脱条件为: α≤2g,。 此时 α=arcos[(h+d/2)/(R一+d/2)] 此文档仅供收集于网络,如有侵权请联系网站删除 只供学习与交流 φ==arctanf=arctan0.08=4º34`26`` 由此可得 d≥2(Rcos2φ一h)/(1+cos2φ)=9.42 mm 为了保证机构能正常工作,滚柱的最大直径不得超过R-h,即d≤R-h=10 mm,故滚柱直径的取值范围为9.42~10mm。
5-10对于图4—3所示斜面机构以及图4—5所示的螺旋机构,当其反行程自锁时,其正行程的效率一定为η≤1/2,试问这是不是一个普遍规律?试分析图示斜面机构当其处于临界自锁时的情况,由此可得出什么重要的结论(设f=0.2)?
解:(1)不是普遍规律。 (2)图(c)反行程的自锁条件:在反行程根据滑块的力平衡条件,作力的多边形图,由此得: G=Fcos(β-α+φ)/sin(α-φ) G0=Fcos(β-α)/sinα η’=G0/G=cos(β-α)sin(α-φ)/[sinαcos(β-α+φ)]
令η’≤0,得α≤φ=arctanf=11.3º时滑块自锁。α=φ=11.31º时,滑块临界自锁。 正行程的效率:因滑块的正行程的效率与反行程的运动方向相反,摩擦力要反向,固由式①中φ反号,即可得正行程时驱动力F与生产阻力G的关系为 F=Gsin(α+φ)/cos(β-α-φ) F0=Gsinα/cos(β-α) 则正行程的效率 η=F0/F=sinαcos(β-α-φ)/[cos(β-α)sin(α+φ)] ② 滑块反行程临界自锁时.其正行程的效率 此文档仅供收集于网络,如有侵权请联系网站删除 只供学习与交流 sin11.31cos(4511.3111.31)0.5667sin(11.3111.31)cos(4511.31)
结沦:由式②可知,β加大η提高.所以自锁机构的效率η≤1/2未必成立,它随驱动力的方向在变化,合理地安排工作行程驱动力的方向,可提高机械效率。
5-11在图5—9所示的偏心夹具中,设已知夹具中心高H=100 mm,偏心盘外径D=120 mm,偏心距e=15mm,轴颈摩擦圆半径ρ=5mm,摩擦系数f=0.15。求所能夹持的工件的最大、最小厚度hmax和hmin。
(答:hmin=25 mm,hmax=36.49 mm。) 解: 要偏心夹具发行程自锁。总反力FR23应穿过摩擦圆,即应满足条件 s—s1≤ρ (1) 由直角三角形△ABC及△OAE有: sl=AC=(DsinΦ)/2 (2) s=OE=esin(δ-Φ) (3) 由式(2)(3)得: 0≤esin(δ-Φ)(DsinΦ)/2≤ρ (4) Φ=arctanf=8.53º 将(4)式代入(1)式得:0≤sin(δ-Φ) ≤0.9267 (5) δ≤76.4564º cosδ=(H-h-D/2)/e=(40-h)/15 (6) 将(5)式代入(6)式得:25mm≤h≤36.49mm 即:hmin=25mm, hmax=36.49mm 5-12图示为一提升装置,6为被提升的重物,设各接触面间的摩擦系数为f(不计铰链中的摩擦),为了能可靠提起重物,试确定连杆2(3、4)杆长的取值范围。