第八章凸轮机构及其设计新
机械设计与实践教案 项目2 凸轮机构设计 (教案)
项目2 凸轮机构设计1.教学目标(1)了解凸轮机构的分类及应用;(2)了解推杆常用运动规律的选择原则;(3)掌握在确定凸轮机构的基本尺寸时应考虑的主要问题;(4)能根据选定的凸轮类型和推杆运动规律设计凸轮的轮廓曲线。
2.教学重点和难点(1)推杆常用运动规律特点及选择原则;(2)盘形凸轮机构凸轮轮廓曲线的设计;(3)凸轮基圆半径与压力角及自锁的关系。
难点:“反转法原理”与压力角的概念。
3.讲授方法多媒体课件4.讲授时数8学时任务一凸轮机构的应用【任务导入】凸轮机构是由凸轮、从动件、机架以及附属装置组成的一种高副机构。
其中凸轮是一个具有曲线轮廓的构件,通常作连续的等速转动、摆动或移动。
从动件在凸轮轮廓的控制下,按预定的运动规律作往复移动或摆动。
受奥拓汽车零部件制造有限公司委托带领学员分析汽车内燃机凸轮机构的工作过程。
【任务分析】在各种机器中,为了实现各种复杂的运动要求,广泛地使用着凸轮机构,汽车机构也不例外,如图2.1是汽车内燃机凸轮机构的工作简图。
【力学知识】平面汇交力系的简化与平衡方程按照力系中各力的作用线是否在同一平面内,可将力系分为平面力系和空间力系。
若各力作用线都在同一平面内并汇交于一点,则此力系称为平面汇交力系。
按照由特殊到一般的认识规律,我们先研究平面汇交力系的简化与平衡规律。
设刚体上作用有一个平面汇交力系F 1、F 2、…、F n ,各力汇交于A 点(图2.2a )。
根据力的可传性,可将这些力沿其作用线移到A 点,从而得到一个平面共点力系(图2.2b )。
故平面汇交力系可简化为平面共点力系。
连续应用力的平行四边形法则,可将平面共点力系合成为一个力。
在图2.3b 中,先合成力F 1与F 2(图中未画出力平行四边形),可得力F R1,即 F R1=F 1+ F 2;再将F R1与F 3合成为力F R2,即F R2=F R1+ F 3;依此类推,最后可得F R =F 1+ F 2+…+ F n =∑F i (2-1)式中 F R 即是该力系的合力。
凸轮机构及其设计26576687

三角函数运动规律
摆线运动规律(正弦加速度)
推程: [0, ]
从 动 件 的 运 动 规 律
2 h h 2 s R R sin sin( ) 2
h h 2 sin( ) 2 h h 2 v cos( ) 2 2h 2 a sin( ) 2 s
[0, ]
0, s 0, v 0, a 0
边界条件为
, s h, v 0, a 0
10 3 15 4 6 5 s h( 3 4 5 ) 30 2 60 3 30 4 v h ( 3 4 5 ) 60 180 120 a h 2 ( 3 4 2 5 3 )
概 述
偏置直动从动件 盘形凸轮机构 对心直动从动件 盘形凸轮机构
三、凸轮机构的基本名词术语
基圆 (r0)、推程、回程、行程(h) 推程运动角(Φ)、回程运动角(Φ’) 远休止角(Φs)、近休止角(Φ’s) 凸轮转角、从动件的位移
概 述
三、凸轮机构的基本名词术语
基圆 (r0)、推程、回程、行程(h) 推程运动角(Φ)、回程运动角(Φ’) 远休止角(Φs)、近休止角(Φ’s) 凸轮转角、从动件的位移
等加速等减速运动规律
回程:
[0, / 2]
作等减速运动
从 动 件 的 运 动 规 律
2h 2 s h 2 4 h v 2 2 4 h a 2
2h 2 ( ) 2 4h v 2 ( ) 2 4h a 2 s
, s 0
多项式类的运动规律
机械原理第章凸轮机构及其设计共61页

谢谢!
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
机械原理第章凸轮机构及其设计
Hale Waihona Puke 6、露凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
21、要知道对好事的称颂过于夸大,也会招来人们的反感轻蔑和嫉妒。——培根 22、业精于勤,荒于嬉;行成于思,毁于随。——韩愈
23、一切节省,归根到底都归结为时间的节省。——马克思 24、意志命运往往背道而驰,决心到最后会全部推倒。——莎士比亚
机械原理第八版答案与解析
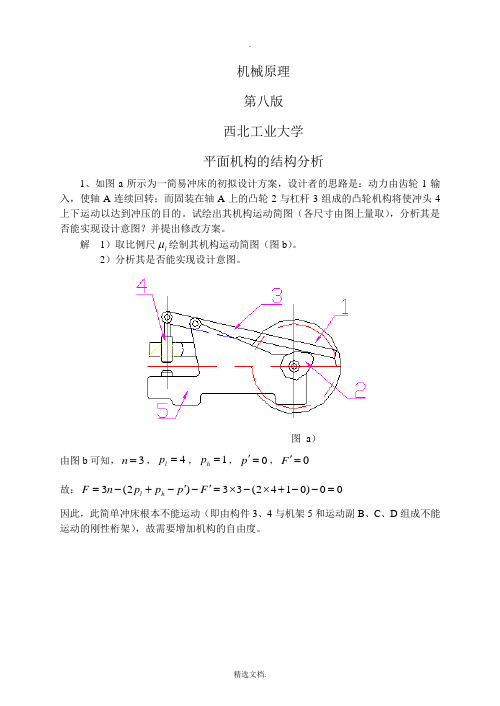
机械原理 第八版 西北工业大学 平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
凸轮机构原理

凸轮机构原理凸轮机构是一种常见的机械传动装置,它通过凸轮的旋转运动将其上连接的零件带动实现特定的运动规律。
在本文中,将介绍凸轮机构的原理及其应用。
一、凸轮机构的基本原理凸轮机构由凸轮、从动件和驱动件组成。
其中,凸轮是核心部件,它通常形状为圆柱体,其轴线与从动件轴线平行。
凸轮的外表面通常具有不规则的形状,以满足特定的运动要求。
从动件与凸轮接触并被驱动进行运动,驱动从动件的力来自于驱动件。
凸轮机构的工作原理是基于凸轮的旋转运动。
当凸轮旋转时,凸轮上的形状会与从动件进行接触,从而产生驱动力。
凸轮的形状决定了从动件的运动规律,可以实现直线运动、转动运动或复杂的轨迹运动等。
在凸轮机构中,凸轮的运动通常是以连续的方式完成的。
当凸轮旋转一周后,以不同速度和运动规律运动的从动件会回到初始位置,从而实现特定的往复或连续运动。
在某些凸轮机构中,凸轮的速度和角度可以通过其他传动装置进行调节,以实现调整从动件的运动规律。
二、凸轮机构的应用凸轮机构广泛应用于各种机械设备中,其中最常见的是内燃机的气门控制系统。
在内燃机中,凸轮机构负责控制气门的开关,以实现燃烧室的进气和排气。
凸轮机构通过凸轮和气门杆的连接,将凸轮的旋转运动转换为气门的上下运动,从而实现气门的开启和关闭。
不同类型内燃机根据其工作原理和要求,凸轮机构的设计和形状也会有所不同。
此外,凸轮机构还应用于机床、自动化生产线、纺织机械等领域。
在机床中,凸轮机构可以用于驱动工作台、进给机构和切削工具等,以实现工件的加工和加工过程的自动化。
在自动化生产线中,凸轮机构可以配合其他传动装置,如链条、齿轮等,实现物料的输送和组装。
而在纺织机械领域,凸轮机构则常用于纺纱机、织布机等的驱动系统,以实现纱线的拉伸和布匹的运动。
凸轮机构的应用范围非常广泛,其原理简单可靠,具有良好的可控性和稳定性。
通过根据具体的运动要求设计凸轮的形状和相关的传动装置,可以实现各种复杂的运动规律,为机械运动的控制和操作提供了有效的解决方案。
凸轮机构的设计和计算
第四章 凸轮机构及其设计
§4-1 凸轮机构的应用和分类
一、应用: 当从动件的位移、速度、加速度必须严格按照
预定规律变化时,常用凸轮机构。
4h 2 所以 a0 t 2 2 v 2h
从动件在匀加速上升过程中的运动方程
2h 2 S h ( ) 2 4h v 2 ( ) 4 h 2 a 2
3、加速度按余弦运动规律变化
f ( x1 , y1 , ) ( x1 x) 2 ( y1 y) 2 rT2 0
dx dy f ( x1 , y1 , ) 2( x1 x) 2( y1 y ) 0 d d
联立求解x1和y1,即得滚子从动件盘形凸轮的实际廓线参数方程:
rT
rT
C
rT rT B ' O
A
'
'
滚子半径rT必须小于理论轮廓曲线外凸部分的 最曲率半径ρ min,设计时, rT 0.8 min
反转法
1
2 3
O r0
4
5
6 7 8
1、尖底直动从动件盘形凸轮 机构凸轮轮廓设计: 已知 0 , e, S , 转向
B1 C1
3 2
B0 (C0)
60°
C9 B9 C8
90°
B8 B7 C6
e K O B2 C 2 r0 C3 B3 C4
180°
C7
30°
C5 B5
机械原理习题参考答案
习题参考答案第二章机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
4351 2解答:原机构自由度F=3⨯3- 2 ⨯4-1 = 0,结构均可:1为滚子;2为摆杆;3为滑块;4为滑杆;5为齿轮及凸轮;6为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b)解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:① 当未刹车时,F=3⨯6-2 ⨯8=2② 在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG 和车轮接触成为一体,位置保持不变,可看作为机架。
③ 完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG 、HIJ 和车轮接触成为一体,位置保持不变,可看作为机架。
机械原理第八版答案与解析
机械原理第八版答案与解析Prepared on 22 November 2020机械原理第八版 西北工业大学平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a )由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度 3-3解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F 4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p (其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
凸轮机构及其设计
第三章凸轮机构及其设计§3-1 概述1 凸轮机构的基本组成及应用特点组成:凸轮、从动件、机架运动特征:主动件(凸轮)作匀角速回转,或作匀速直线运动,从动件能实现各种复杂的预期运动规律。
尖底直动从动件盘形凸轮机构、尖底摆动从动件盘形凸轮机构滚子直动从动件盘形凸轮机构、滚子摆动从动件盘形凸轮机构圆柱凸轮机构、移动凸轮机构、平底直动从动件盘形凸轮机构端面圆柱凸轮机构、内燃机配气凸轮机构优点:(1)从动件易于实现各种复杂的预期运动规律。
(2)结构简单、紧凑。
(3)便于设计。
缺点:(1)高副机构,点或线接触,压强大、易磨损,传力小。
(2)加工制造比低副机构困难。
应用:主要用于自动机械、自动控制中(如轻纺、印刷机械)。
2 凸轮机构的分类1.按凸轮形状分:盘型、移动、圆柱2.按从动件运动副元素分:尖底、滚子、平底、球面(P197)3.按从动件运动形式分:直动、摆动4.按从动件与凸轮维持接触的形式分:力封闭、形封闭3 凸轮机构的工作循环与运动学设计参数§3-2凸轮机构基本运动参数设计一.有关名词行程-从动件最大位移h。
推程-S↑的过程。
回程-S↓的过程。
推程运动角-从动件上升h,对应凸轮转过的角度。
远休止角-从动件停留在最远位置,对应凸轮转过的角度。
回程运动角-从动件下降h,对应凸轮转过的角度。
近休止角-从动件停留在低远位置,对应凸轮转过的角度。
一个运动循环凸轮:转过2π,从动件:升→停→降→停基圆-以理论廓线最小向径r0作的圆。
尖底从动件:理论廓线即是实际廓线。
滚子从动件:以理论廓线上任意点为圆心,作一系列滚子圆,其内包络线为实际廓线。
从动件位移线图——从动件位移S与凸轮转角 (或时间t)之间的对应关系曲线。
从动件速度线图——位移对时间的一次导数加速度线图——位移对时间的二次导数 统称从动件运动线图 度量基准(在理论廓线上)1)从动件位移S :推程、回程均从最低位置度量。
2)凸轮转角δ:从行程开始对应的向径度量(以O 为圆心,O 至行程起始点为半径作弧与导路中心线相交得P 点,∠POX=δ)。
凸轮机构
机械基础一轮复习资料(凸轮机构)【复习要求】1.了解凸轮机构的分类、应用及特点;2.了解凸轮轮廊曲线的画法,熟悉常用位移曲线的画法;3.掌握基圆半径、行程、压力角等基本参数的概念及它们对工作的影响;4.掌握凸轮从动件的常用运动规律及其特点和应用。
【知识网络】【知识精讲】一、凸轮机构的基本概念1.凸轮:具有控制从动件运动规律的曲线轮廓的构件。
2.凸轮机构:由凸轮、从动件和机架组成的传动机构,该机构中凸轮作主动件并作等速转动(往复移动)。
3.基圆(基圆半径):以凸轮回转中心为圆心,以凸轮理论廓线的最小回转半径为半径所作的圆称为基圆。
该圆的半径称为基圆半径,用r0表示。
4.凸轮理论廓线:凸轮从动件的参考点(尖端或滚子中心或平底中点)在凸轮平面内的运动轨迹。
5.凸轮实际廓线:直接与从动件接触的凸轮廓线。
6.位移及行程:凸轮转过一个角度,从动件对应移动的距离,称为从动件的位移S。
在凸轮一转中,从动件所能达到的最大位移称为行程,用符号h表示。
7.压力角(α):凸轮理论廓线上某点的法线方向(即从动件的受力方向)和从动件运动速度方向之间所夹的锐角。
8.S—δ曲线:表达从动件位移S与凸轮转角δ关系的曲线。
9.转角(运动角)δ:凸轮转过的角度。
二、凸轮机构的应用特点1.高副机构易磨损,结构简单、紧凑,传动力较小。
2.能严格实现从动件的运动要求,从动件的运动规律可任意拟定。
3.可高速起动,但高速凸轮精确设计困难。
4.加工方便容易,广泛用于自动化机械中。
三、凸轮机构的分类(见表)四、凸轮机构从动件的常用运动规律及工作特点、应用场合(见表)五、凸轮机构有关参数对工作的影响(见表)为使运动不“失真”r T<ρmin一般取r T<0.8ρmin【边缘知识】一、运动角二、理论轮廓线与实际轮廓线的关系尖顶接触的理论轮廓线与实际轮廓线重合;平底接触两曲线接近;滚子接触两曲线为法向等距曲线(此两曲线只有在休止角区域内才是相似曲线)。