三轴伺服移动平台控制系统的设计毕业论文
基于FX3U和触摸屏的三轴伺服控制系统设计

基于FX3U和触摸屏的三轴伺服控制系统设计
张航
【期刊名称】《现代机械》
【年(卷),期】2018(000)004
【摘要】以实际广泛应用的伺服控制系统为研究对象,利用了三菱FK3U系列PLC 内置的三轴伺服定位控制功能,通过连接MR-J3系列通用交流伺服驱动器和WEINVIEW MT8000系列人机界面,设计出一款经济实用的三轴伺服控制系统.分析了系统硬件组成及接线过程,并进行了系统软件设计和触摸屏监控界面编辑设计.经实际测试表明:系统性能稳定,定位精度高.设计方案精简实用,在实际生产中具有广泛的应用价值.
【总页数】4页(P27-30)
【作者】张航
【作者单位】广东石油化工学院机电工程学院,广东茂名525000
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于EtherCAT网络的三轴伺服控制系统设计 [J], 李志洲;郑民欣;王锦锦;郑安平
2.基于可编程多轴控制器(PMAC)三轴转台伺服控制系统设计 [J], 黄卫权;刘文佳
3.基于FX2N-20GM和FX3U的三轴伺服控制系统设计 [J], 岳东海;葛永康
4.基于三菱FX3U系列PLC的伺服控制系统设计 [J], 廖广益;崔静
5.基于三菱PLC的四轴伺服控制系统设计 [J], 陈骥;余和青;姜贻樟;刘文波;张铂
因版权原因,仅展示原文概要,查看原文内容请购买。
平面XY伺服控制系统的设计结题论文
机电系统综合设计报告平面XY——伺服数字控制的设计院系名称:机械与储运工程学院专业班级:机械设计制造及其自动化班学生姓名:学号:同组学生姓名:学号:指导教师:完成日期年月日摘要本课程设计要求通过计算机编程语言实现对伺服电机的控制,以此巩固和加强有关机电一体化知识的理解。
报告详细阐述了GT运动控制器的硬件,软件环境。
GT运动控制器的控制原理,运用VB 6.0实现数控技术中逐点比较法的插补原理,图像的二值化原理,图像轮廓提取的四邻域法原理,以及这些原理在本课程设计中的具体应用和实现方法。
介绍本小组制作的伺服电机控制系统的界面及原理,让读者在一定程度上了解数控技术,图像处理技术以及其他一些相关的知识内容。
关键词:GT运动控制器;VB 6.0;插补原理;二值化;四邻域法目录摘要 (I)第1章设计目的及要求 (1)1.1 设计目的 (1)1.2 设计要求 (1)第2章设计的软硬件环境 (2)2.1 设计系统的硬件环境 (2)2.2 设计系统的软件环境 (2)第3章设计原理 (3)3.1 电机驱动使能及驱动 (3)3.1.1 运动控制卡的初始化 (3)3.1.2 专用输入信号参数的设置 (3)3.1.3 运动控制轴的初始化 (3)3.2 单轴运动 (4)3.3 多轴运动 (5)3.4 插补算法 (6)3.4.1 直线插补算法 (6)3.4.2 圆弧插补算法 (7)3.4.3 椭圆插补算法 (9)3.5 图形轮廓提取 (10)3.6 图像数据处理 (11)第4章设计方案及具体实施 (12)4.1 总体设计方案 (12)4.2 控制轴的复位及限位判断 (13)4.3 几何图形加工的程序实现 (14)4.3.1 直线加工的程序实现 (14)4.3.2 圆弧加工的程序实现 (15)4.3.3 椭圆加工的程序实现 (15)4.4 图形轮廓加工的程序实现 (16)4.4.1 电机位置的调整 (17)4.4.2 图像的二值化处理 (17)4.4.3 图像的轮廓提取 (17)4.4.4 图像数据处理及轮廓加工 (18)第5章设计结果与不足 (19)第6章设计总结 (20)附录A 课程设计日志 (21)附录B 设计成果(加工出的插补曲线图,图像轮廓图) (22)第1章设计目的及要求1.1 设计目的本课程设计要求以GT系列运动控制器为核心,以计算机高级语言为控制手段,通过计算机与运动控制器相互通信,对其进行初始化,运动过程的控制来实现运动控制器两轴和笔架的运动,并绘制简单的几何图形如:直线,圆,椭圆等,绘制计算机处理后的图形。
多轴运动实验平台的控制系统研究

引言随着工业技术的进一步发展,多轴运动控制技术已应用于大部分工业领域,如机器人、数控机床等。
多轴运动控制系统的优劣将直接决定被控设备的性能。
目前,大部分多轴运动控制系统均采用专用的计算机加多单片机-多控制回路的封闭式并行结构。
此类控制方法为整体控制,难以实现在同步运动时的高精度控制。
为此,本控制系统采用PC 机和单片机运动控制器,形成一种分布式、开放式的控制方法。
此控制方法可使控制系统的多轴控制指令集合在一个中断周期内完成,以实现多轴的高精度同步控制。
同时,上位机和下位机控制程序可以用高级语言实现分块独立开发,有效缩短了开发周期。
1结构简介该多轴运动实验平台由横向X 轴、纵向Y 轴和Z 轴组成。
横向X 轴由步进电机(X )控制,纵向Y 轴由步进电机(Y )控制,Z 轴由工作台上的步进电机控制。
按照图1所示,建立一个伺服平台运动的坐标系。
该坐标系以观测点作为坐标原点,以控制伺服平台旋转的3个轴作为坐标轴。
伺服平台的三个轴的旋转运动是利用三个步进电机进行控制。
假设需要使工作台达到某个位置,通过计算可以得出其在坐标系中对应的投影位置与3个轴的夹角,从而通过控制X 、Y 、Z 三个轴的步进电机,使工作台移动到目标位置。
2控制系统设计本控制系统分上位机(PC )和下位机(单片机控制系统)两部分。
上位机和下位机之间将通过485总线进行数据传输,主要完成人机交互等功能。
上位机主要用来设定运动路径、显示运动状态、日常报表和故障显示等功能。
下位机主要用来接受上位机的指令,按照上位机设定的路径控制运动设备,使得运动设备按照预定的轨迹运转。
下位机主要由几个模块组成:扩展数据存储、按键处理、脉冲发生器、I/O 开关量、液晶显示等。
下位机将按照上位机的指令,独立实现对多轴运动设备的同步设置和数据采集等。
本系统的控制方式,如图2所示[1]。
2.1步进电机驱动电路的设计本控制系统选用两相四线混合式步进电机,通过切换通电顺序改变步进电机的旋转方向,实现步进电机的正转和反转的控制。
基于PLC控制的三轴机械手系统设计

基于PLC控制的三轴机械手系统设计本文介绍三轴机械手系统设计的背景和目的,并概述了PLC控制的重要性。
三轴机械手是一种常见的工业自动化设备,可用于实现对物体的抓取与放置。
三轴机械手系统设计的目的是提高生产效率、减少人工操作,并保证操作的准确性和稳定性。
PLC(可编程逻辑控制器)是一种数字化电子设备,广泛应用于工业自动化控制系统中。
与传统的电气控制系统相比,PLC具有编程灵活、易于维护和扩展的优势,能够实现复杂的自动控制功能。
本文将详细介绍基于PLC控制的三轴机械手系统的设计,包括硬件设计、软件编程和系统调试等内容。
通过PLC的编程控制,将实现对三轴机械手的协同运动和精确控制,提高生产效率和产品质量。
引用的内容请核实来源三轴机械手系统是由机械臂、执行机构和传感器等组成部分构成的。
以下是对这些组成部分的描述:机械臂机械臂是机械手系统的核心组件,用于执行各种动作和操作。
它一般包括多个可活动的关节,通过电动机驱动实现运动。
机械臂的结构和尺寸可以根据具体需求进行设计,以适应不同的应用场景。
执行机构执行机构是机械臂的末端装置,用于实现抓取、放置或其他动作。
它通常包括夹爪、吸盘或其他特定工具,可以根据需要进行更换。
执行机构的设计需要考虑到操作的稳定性、精度和安全性。
传感器传感器是机械手系统中重要的反馈设备,用于感知环境和检测目标物体。
常用的传感器包括力传感器、位置传感器和视觉传感器等。
这些传感器可以提供实时数据,帮助机械手系统做出准确的动作控制。
以上是基于PLC控制的三轴机械手系统的整体结构描述。
这个系统结构的设计可以根据具体应用的需求进行进一步的优化和调整。
本文将介绍基于PLC(可编程逻辑控制器)的控制系统设计。
该设计包括输入输出设备的选型、控制逻辑的设计和编程等内容。
输入输出设备选型在设计基于PLC控制的三轴机械手系统时,首先需要选择适合的输入输出设备。
这些设备包括传感器、执行器和人机界面。
传感器选型传感器用于检测系统的状态和环境条件。
《皮肤3D打印三维移动平台搭建与温度控制系统设计》范文

《皮肤3D打印三维移动平台搭建与温度控制系统设计》篇一一、引言在当代科技高速发展的背景下,皮肤3D打印技术成为了医疗与生物技术领域中的热门研究课题。
三维移动平台与温度控制系统的设计对于提高皮肤3D打印的效率、精确度和效果具有关键作用。
本文将重点阐述皮肤3D打印的三维移动平台搭建与温度控制系统设计的方法与实施,旨在为相关领域的研究提供理论依据和参考方案。
二、皮肤3D打印技术概述皮肤3D打印技术通过利用生物材料、生物细胞或其它具有再生潜力的生物基材料,进行体外建模与构建,以达到皮肤再生的目的。
这种技术以其高效、精准的特点在烧伤治疗、创伤修复、先天性皮肤疾病等医学领域有着广阔的应用前景。
三、三维移动平台的搭建1. 平台结构设计与选材三维移动平台是皮肤3D打印过程中的关键设备之一,其设计应考虑精确度、稳定性及可操作性。
通常采用高精度的机械结构,如铝合金框架,搭配高精度的导轨和滑块,确保打印过程中的稳定性和精确性。
2. 运动控制系统的设计运动控制系统是实现三维移动平台精确运动的核心。
该系统应采用先进的控制算法和传感器技术,确保在X、Y、Z三个方向上的精确运动和定位。
此外,应考虑系统的闭环控制,确保运动过程中能够及时纠正误差,保证打印精度。
四、温度控制系统的设计1. 温度控制系统的组成温度控制系统是皮肤3D打印过程中的另一个重要组成部分,它能够确保打印过程中生物材料在适宜的温度下进行反应和固化。
该系统主要由温度传感器、加热元件和控制器组成。
2. 温度控制策略的制定针对不同的生物材料和打印需求,应制定相应的温度控制策略。
通过精确控制加热元件的功率和温度传感器的反馈信号,实现温度的精确控制。
同时,应考虑温度的稳定性和均匀性,确保打印过程中温度不会出现大幅度的波动或温差过大的情况。
五、系统集成与测试在完成三维移动平台和温度控制系统的设计和选材后,需要进行系统集成和测试。
系统集成应确保各部分之间的协调性和兼容性,测试过程中应重点关注系统的运行稳定性、精确度和打印效果。
毕业设计论文:基于PLC的xy轴交流伺服运动控制装置

毕业设计(论文)基于PLC的xy轴交流伺服运动控制装置THE XY AXIS AC SERVO MOTION CONTROL DEVICE BASED ON THE PLC学生姓名学院名称机电工程学院专业名称机械设计制造及其自动化指导教师年月日徐州工程学院学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日徐州工程学院学位论文版权协议书本人完全了解徐州工程学院关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归徐州工程学院所拥有。
徐州工程学院有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
徐州工程学院可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要传统的运动控制系统由于其封闭式的结构、控制软件的兼容性差、容错性和可靠性差、缺少网络功能等缺陷,已不能满足现代运动控制的要求。
现代运动控制技术是计算机技术、传感技术、电力电子技术和机械工程技术等的继承和综合应用,用于机械传动的自动化和智能化的创建,对机械传动的运动位置、运动轨迹和各种运动参数进行实时的控制和管理。
本设计的主要工作是对机电一体化教学设备的控制系统的设计,该设计以对加工中心的设计方法及步骤为主线展开设计,包括控制系统总体设计,系统软件、硬件的选择,系统的调试等内容。
设计硬件如下:信息处理和控制由PLC系统完成;驱动元件为国内自行设计、自主开发、自有工厂制造的全数字式MR-J3-10A交流伺服驱动器;执行机构是HF-KP13交流伺服电机;机械本体为一个两维的X-Y工作平台,是工业应用中最典型的控制对象之一;反馈检测元件为编码器。
三轴机械手控制系统设计
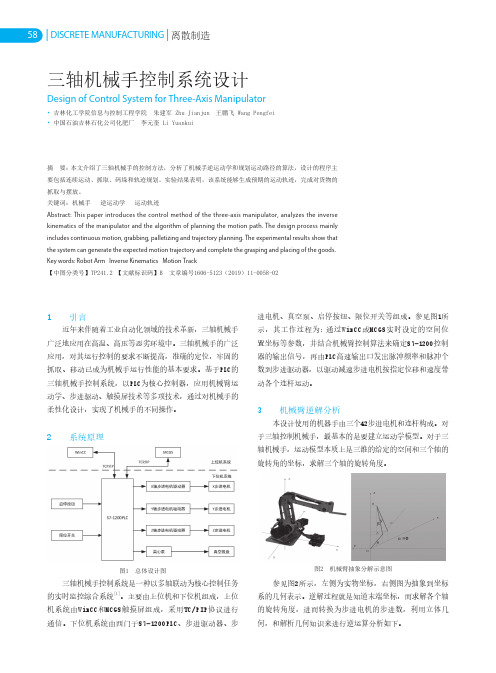
58│DISCRETE MANUFACTURING│离散制造三轴机械手控制系统设计Design of Control System for Three-Axis Manipulator• 吉林化工学院信息与控制工程学院 朱建军 Zhu Jianjun 王鹏飞 Wang Pengfei• 中国石油吉林石化公司化肥厂 李元奎 Li Yuankui摘 要:本文介绍了三轴机械手的控制方法,分析了机械手逆运动学和规划运动路径的算法,设计的程序主要包括连续运动、抓取、码垛和轨迹规划。
实验结果表明,该系统能够生成预期的运动轨迹,完成对货物的抓取与摆放。
关键词:机械手 逆运动学 运动轨迹Abstract: This paper introduces the control method of the three-axis manipulator, analyzes the inverse kinematics of the manipulator and the algorithm of planning the motion path. The design process mainly includes continuous motion, grabbing, palletizing and trajectory planning. The experimental results show that the system can generate the expected motion trajectory and complete the grasping and placing of the goods.Key words: Robot Arm Inverse Kinematics Motion Track【中图分类号】TP241.2 【文献标识码】B 文章编号1606-5123(2019)11-0058-021 引言近年来伴随着工业自动化领域的技术革新,三轴机械手广泛地应用在高温、高压等恶劣环境中。
数控车床伺服进给系统结构设计毕业论文

摘要数控机床作为机电一体化的典型产品,在机械制造业中发挥着巨大的作用,很好的解决了现代机械制造中结构复杂,精密,批量小,多变零件的加工问题,且能稳定产品的加工质量,大幅度提高生产效率。
本论文主要对数控机床伺服进给系统的机械部分这一课题进行探讨,文中详细描述了数控机床伺服进给系统的设计方法,包括传动系统总体设计,滚珠丝杠副的选择,伺服电动机的选择,精度和刚度验算。
同时运用软件Solidworks做出伺服进给系统的零部件,以及将各个零部件进行装配,二维工程图出图。
关键词:数控机床;伺服电动机;伺服进给系统;滚珠丝杠副AbstractNC machine tools as typical electromechanical products, plays an enormous role in machinery manufacturing, it solutes the problems of modern machinery manufacturing complex, precision, small batches,changeable parts processing, also it can be able to stable quality of products, increase productivity greatly. In this paper, it mainly explore to the topic of mechanical parts of NC machine tools’ servo feed system, This article describes the designing method of the NC machine tools’ servo feed system , including designing the transmission system, choosing Ball Screws, servo motor, checking the accuracy and rigidity. Make out parts of NC machine tools’ servo feed system and assemble the parts with solidworks. Export 2D engineering drawing and make the animations of feed system, produce three-dimensional cutaway views of Ball Screws and Rolling Guides.Key word: NC machine;Servo motor; Servo feed system; Ball Screws目录摘要 (I)Abstract (II)1 绪论 (1)1.1 数控机床的概念 (1)1.2 数控机床的组成分类及特点 (1)1.2.1 数控机床的组成 (1)1.2.2 数控机床的分类 (1)1.2.3 数控机床的特点 (2)1.3 数控系统的发展简史及国外发展现状 (2)1.4 我国数控系统的发展现状及趋势 (3)1.4.1 数控技术状况 (3)1.4.2 数控系统的发展趋势 (4)1.5 伺服系统的特点 (4)1.6 本课题的研究内容和方法 (6)1.7 本章小结 (7)2 进给系统的总体方案设计 (7)2.1 机床的主要性能 (8)2.2 进给系统的精度要求 (8)2.3 进给传动控制伺服系统的选择 (8)2.4 进给系统的传动要求及传动类型的选择 (9)2.4.1 进给系统的传动要求 (9)2.4.2 传动类型的选择 (9)2.5 电机与丝杠联接方式的选择 (10)2.6 进给传动方案设计 (11)3 数控车床伺服进给系统X轴选型 (12)3.1 滚珠丝杆机构的计算选型 (13)3.1.2 精度等级选定 (14)3.1.3 导程的计算和选定 (15)3.1.4 丝杆支承方式选定 (15)3.1.5 丝杆外径选定及校核 (15)3.1.6 计算最大轴向载荷 (16)3.1.7 轴向允许载荷计算 (16)3.1.8 丝杠允许转速计算及校核 (17)3.1.9 寿命计算及校核 (19)3.2 电机的选型 (19)3.2.1 转速的计算 (19)3.2.2 驱动扭矩计算 (20)3.2.3 计算角加速度 (21)3.2.4 电机所需的加速扭矩 (21)3.2.5 计算各种运动状态下点检所需要的驱动扭矩 (21)3.2.6 电机转动惯量要求 (22)3.3 滚珠丝杠副的支承的设计 (22)3.4 同步齿轮带传动的设计 (24)3.5 导轨的选择 (25)4 数控车床伺服进给系统Z轴选型 (26)4.1 滚珠丝杆机构的计算选型 (26)4.1.1载荷的确定 (27)4.1.2 精度等级选定 (27)4.1.3 导程的计算和选定 (28)4.1.4 丝杆支承方式选定 (29)4.1.5 丝杆外径选定及校核 (29)4.1.6 计算最大轴向载荷 (29)4.1.7 轴向允许载荷计算 (30)4.1.8 丝杠允许转速计算及校核 (31)4.1.9 寿命计算及校核 (33)4.2 电机的选型 (33)4.2.1 转速的计算 (33)4.2.2 驱动扭矩计算 (34)4.2.3 计算角加速度 (35)4.2.4 电机所需的加速扭矩 (35)4.2.5 计算各种运动状态下点检所需要的驱动扭矩 (35)4.2.6 电机转动惯量要求 (36)4.3 滚珠丝杠副的支承的设计 (37)4.4 联轴器传动的设计 (39)4.5 导轨的选择 (39)5 伺服进给系统的结构设计 (40)5.1 solidworks实体设计的特征功能及其在本次设计中的应用405.2 伺服进给系统主要零件的设计及装配 (41)5.2.1 导轨的设计 (41)5.2.2 Z轴丝杠螺母的设计 (45)5.2.3 添加轴承 (46)5.2.4 添加紧固件 (46)5.2.5 X轴滑块的设计 (47)5.2.6 丝杠的设计 (47)5.3 伺服进给系统零件的装配 (48)5.4 伺服进给系统的装配图 (49)结论 (51)致谢 (52)参考文献 (53)附录A (54)附录B (69)1 绪论1.1 数控机床的概念数控机床是综合应用计算机、自动控制、自动检测及精密机械等高新技术的产物,是技术密集度及自动化程度很高的典型机电一体化加工设备。