CIRC指令
工业机器人操作与编程机器人运动指令课件

目 录
• 工业机器人概述 • 工业机器人操作基础 • 工业机器人编程基础 • 工业机器人运动指令详解 • 工业机器人操作与编程实例 • 工业机器人维护与保养
01
工业机器人概述
工业机器人的定义与分类
工业机器人的定义
工业机器人是一种自动化机器, 可以在各种工作环境中执行一系 列重复或复杂的任务。
06
工业机器人维护与保养
工业机器人日常维护保养
01
02
03
04
每日检查机器人各部件是否正 常,特别是运动部件是否有异
常声音或振动。
每日清理机器人的尘土和杂物 ,保持机器人的清洁。
每日检查机器人各线路是否松 动或断裂,特别是电源线和信
号线。
每日检查机器人各部件的紧固 螺丝是否松动,特别是运动部
件的螺丝。
其他常用运动指令介绍
直线插补指令
01
用于控制机器人在两个点之间进行直线插补运动,可实现沿直
线轨迹的匀速运动。
圆弧插补指令
02
用于控制机器人在两个点之间进行圆弧插补运动,可实现沿圆
弧轨迹的匀速运动。
螺旋插补指令
03
用于控制机器人在两个点之间进行螺旋插补运动,可实现沿螺
旋轨迹的匀速运动。
05
工业机器人操作与编程实 例
搬运机器人操作与编程实例
总结词:通过实际操作和编 程,掌握搬运机器人的基本
操作和运动指令。
详细描述
1. 介绍搬运机器人的基本结 构和功能。
2. 讲解搬运机器人的基本操 作,包括启动、停止、急停 等。
3. 通过实际编程案例,掌握 搬运机器人的运动指令,如 PTP、LIN、CIRC等。
点焊路径调试
1.焊点轨迹调试进行车身焊点轨迹调试需具备以下KUKA机器人的基础知识:➢具有KRC编程基础,对点焊指令和机器人移动指令有一定了解。
➢熟悉机器人三种动作模式,熟练掌握示教器的基本操作。
➢掌握四种坐标系之间的对应关系,特别是车身坐标系。
➢电阻焊的原理以及伺服焊枪基本技术参数。
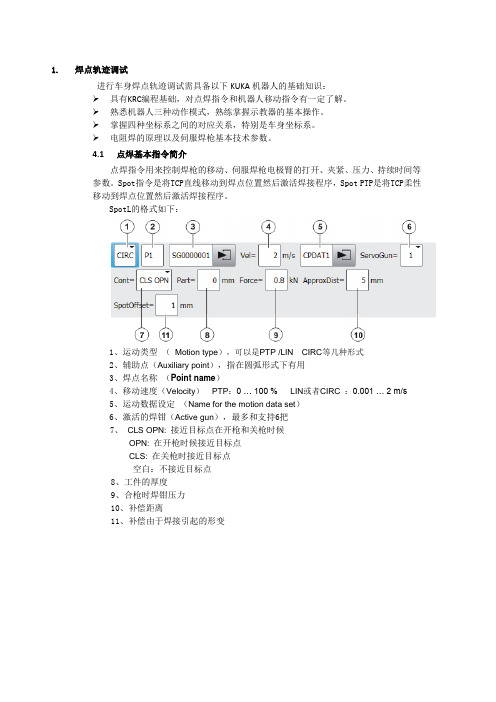
4.1点焊基本指令简介点焊指令用来控制焊枪的移动、伺服焊枪电极臂的打开、夹紧、压力、持续时间等参数。
Spot指令是将TCP直线移动到焊点位置然后激活焊接程序,Spot PTP是将TCP柔性移动到焊点位置然后激活焊接程序。
SpotL的格式如下:1、运动类型(Motion type),可以是PTP /LIN CIRC等几种形式2、辅助点(Auxiliary point),指在圆弧形式下有用3、焊点名称(Point name)4、移动速度(Velocity)PTP:0 … 100 %LIN或者CIRC :0.001 … 2 m/s5、运动数据设定(Name for the motion data set)6、激活的焊钳(Active gun),最多和支持6把7、CLS OPN: 接近目标点在开枪和关枪时候OPN: 在开枪时候接近目标点CLS: 在关枪时接近目标点空白:不接近目标点8、工件的厚度9、合枪时焊钳压力10、补偿距离11、补偿由于焊接引起的形变12、程序号选项13、调用的焊接程号示意图如下所示:图5.34 点焊示意图调试时候注意事项:1、要执行INT指令,否则在执行焊接指令时候会报轨迹未编程2、第一条运动指令必须为PTP3、编程时候要点击“选择”4、修改焊点名称时候,要将机器人移动到该焊点位置,否则焊点位置会被记录成修改名称的位置。
5、调试时候焊钳静臂要贴到工件上6、调试时候在T1模式下,T2验证时候要注意改成虚拟焊接模式(TEST模式)7、注意4轴和6轴数据,上下目标点机器人不要角度变化过大4.1焊点轨迹调试4.3.1调试流程焊点轨迹调试就是让机器人抓着焊枪从home点出发,依次焊完所有焊点后,再回到home点的整个调试过程。
KUKA机器人试题
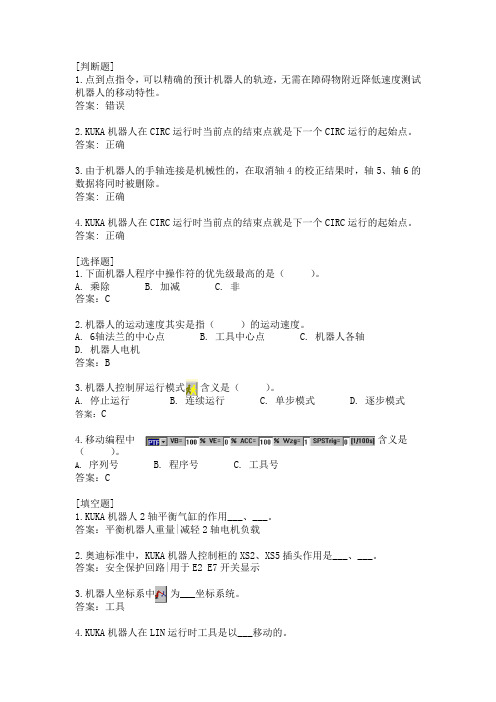
[判断题]1.点到点指令,可以精确的预计机器人的轨迹,无需在障碍物附近降低速度测试机器人的移动特性。
答案: 错误2.KUKA机器人在CIRC运行时当前点的结束点就是下一个CIRC运行的起始点。
答案: 正确3.由于机器人的手轴连接是机械性的,在取消轴4的校正结果时,轴5、轴6的数据将同时被删除。
答案: 正确4.KUKA机器人在CIRC运行时当前点的结束点就是下一个CIRC运行的起始点。
答案: 正确[选择题]1.下面机器人程序中操作符的优先级最高的是()。
A.乘除B. 加减C. 非答案:C2.机器人的运动速度其实是指()的运动速度。
A. 6轴法兰的中心点B. 工具中心点C. 机器人各轴D. 机器人电机答案:B3.机器人控制屏运行模式含义是()。
A. 停止运行B. 连续运行C. 单步模式D. 逐步模式答案:C4.移动编程中 Wzg含义是()。
A.序列号B. 程序号C. 工具号答案:C[填空题]1.KUKA机器人2轴平衡气缸的作用___、___。
答案:平衡机器人重量|减轻2轴电机负载2.奥迪标准中,KUKA机器人控制柜的XS2、XS5插头作用是___、___。
答案:安全保护回路|用于E2 E7开关显示3.机器人坐标系中为___坐标系统。
答案:工具4.KUKA机器人在LIN运行时工具是以___移动的。
答案: 沿着一条直线[简答题]1.VKR C2机器人控制柜中,KPS27产生27V为哪些设备提供电源?答案: 电机制动、机器人控制器PC、伺服控制器、外围设备、电池2.奥迪标准中,机器人控制柜的XS2、XS3、XS4、XS5插头作用是什么?答案: 1、XS2:S7控制柜向机器人内部的Interbus板、安全回路板供电;同时用于对S7控制柜系统的急停保护回路、安全门保护回路及E2钥匙开关的状态监控。
2、XS3:主要是向机器人本身带的外部工具的Interbus模块提供us1和us2电源。
3、XS4:用于Interbus光缆接入机器人电柜。
C10系统常用功能

C10系统常用功能1 工具坐标系设置2 用户坐标系设置3 速度参数设置4 区域监控5 码垛6 碰撞检测1 工具坐标系设置C10控制系统中,工具坐标系的设置是通过Tool() 命令实现的。
工具坐标系的意义是为机器人设置新的工具中心点(TCP)。
机器人的默认TCP点是六轴法兰盘的中心点,Tool()命令为机器人设置一个新的工具坐标系,通过该指令可以修改机器人的末端TCP点。
1.1 工具坐标系的示教首先,我们在示教器界面内新建一个程序,并加载,加载后点击新建,选择设置命令组,选择Tool。
点击确定后,点击变量,新建一个t0变量。
新建的t0变量,默认值全为0。
再点击确定,Tool(t0)建立完成。
这时,我们按下变量页面键,会出现下图选择工具手示教选项。
(这里要注意,如果加载的工程中不包含工具坐标系变量,这里的工具手示教选项是隐藏的。
因此我们要先新建工具坐标系变量。
)这里就是工具手示教的向导界面。
请注意选择要设置的工具坐标系变量。
这里我们选择的是test.t0,即test程序下的t0变量。
点击设置,选择4点XYZ1点XYZ:利用已知工具,来求解未知工具,需要将两个TCP对准同一点。
(该方法不常用)4点XYZ:求解一个未知工具相对默认TCP(6轴法兰盘中心点)的XYZ偏移量。
1点6D:求解工具的姿态,即工具坐标系的XYZ方向设置。
这里我们先应用4点XYZ 法,求出t0 的xyz,再用1点6D求出t0的abc。
选择4点XYZ后,点击向前运动机器人,使工具末端点,对准一个尖点P,示教第一点。
如上图所示。
点击示教。
点击向前,继续示教第二三四点。
使四个点,都对准尖点P。
示教时注意,应使四个点的姿态差异尽量大,太小的话,系统会提示报警:两个点距离太近。
四点示教完成后,点击向前,就计算出了t0的XYZ。
点击确定,保存后,继续点击设置,选择1点6D点击向前运动机器人,使希望得到工具手的Z方向和X方向分别对准世界坐标系的某一方向(在下拉框中选择)。
DIMS语言简明教程
DMIS语言简明教程本教程基于DMIS 4.0语言编写,简明地介绍了最常用的DMIS指令,希望本教程能对ARCO 用户利用DMIS语言编程时提供一些快速简便的指导。
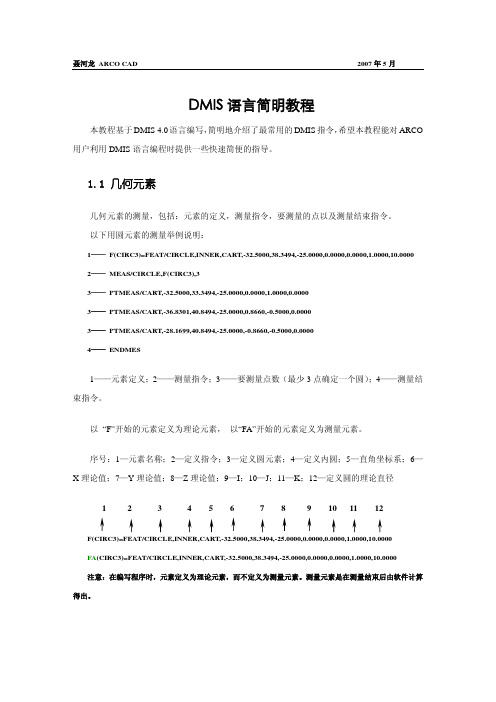
1.1 几何元素几何元素的测量,包括:元素的定义,测量指令,要测量的点以及测量结束指令。
以下用圆元素的测量举例说明:1—— F(CIRC3)=FEAT/CIRCLE,INNER,CART,-32.5000,38.3494,-25.0000,0.0000,0.0000,1.0000,10.0000 2—— MEAS/CIRCLE,F(CIRC3),33—— PTMEAS/CART,-32.5000,33.3494,-25.0000,0.0000,1.0000,0.00003—— PTMEAS/CART,-36.8301,40.8494,-25.0000,0.8660,-0.5000,0.00003—— PTMEAS/CART,-28.1699,40.8494,-25.0000,-0.8660,-0.5000,0.00004—— ENDMES1——元素定义;2——测量指令;3——要测量点数(最少3点确定一个圆);4——测量结束指令。
以 “F”开始的元素定义为理论元素,以“FA”开始的元素定义为测量元素。
序号:1—元素名称;2—定义指令;3—定义圆元素;4—定义内圆;5—直角坐标系;6—X理论值;7—Y理论值;8—Z理论值;9—I;10—J;11—K;12—定义圆的理论直径1 2 3 4 5 6 7 8 9 10 11 12F(CIRC3)=FEAT/CIRCLE,INNER,CART,-32.5000,38.3494,-25.0000,0.0000,0.0000,1.0000,10.0000FA(CIRC3)=FEAT/CIRCLE,INNER,CART,-32.5000,38.3494,-25.0000,0.0000,0.0000,1.0000,10.0000注意:在编写程序时,元素定义为理论元素,而不定义为测量元素。
运动控制指令介绍
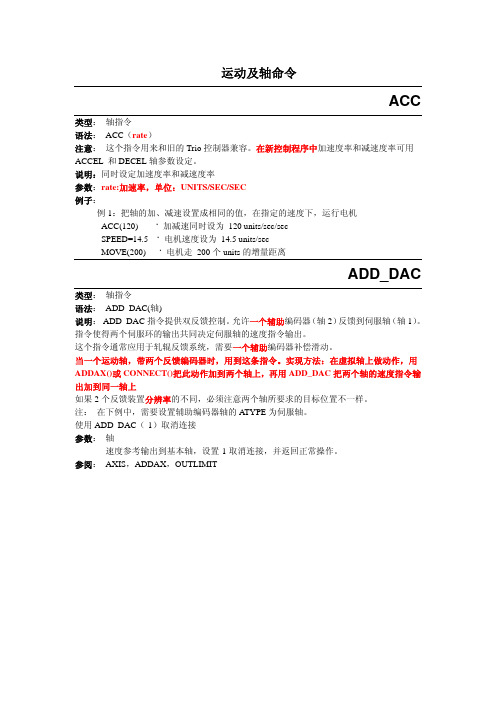
运动及轴命令ACC类型:轴指令语法: ACC(rate)注意:这个指令用来和旧的Trio控制器兼容。
在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:rate:加速率,单位:UNITS/SEC/SEC例子:例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机ACC(120) ‘ 加减速同时设为 120 units/sec/secSPEED=14.5 ‘ 电机速度设为 14.5 units/secMOVE(200) ‘ 电机走 200个units的增量距离ADD_DAC类型:轴指令语法: ADD_DAC(轴)说明: ADD_DAC指令提供双反馈控制。
允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。
指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。
这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。
当一个运动轴,带两个反馈编码器时,用到这条指令。
实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。
注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。
使用ADD_DAC(-1)取消连接参数:轴速度参考输出到基本轴,设置-1取消连接,并返回正常操作。
参阅: AXIS,ADDAX,OUTLIMIT例1:BASE(1)‘使两轴编码器在相同的线性距离反馈回相同的计数ENCODER_RATIO(counts_per_mm2, counts_per_mm1)UNITS AXIS(1) = counts_per_mm1UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上‘到现在,两轴已经准备就绪MOVE(1200)WAIT IDLEADDAX类型:运动控制指令语法: ADDAX(轴号)说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
PRESSCAD命令
Xd Yd
'CLS_ALL _qleader _dimcenter _dim
PRESSCAD快键命令
功能說明 自動生成3D開模組立圖 自動生成3D閉模組立圖 設置模具透明度 建立切割面,原始圖元不改變 2D滑塊轉換為3D實體 用於載入3D料帶繪制主介面 將“二維視圖”切換至“三維視圖” 將“三維視圖” 切換為“二維視圖” 轉換為“正面主視圖” 快速轉換為“三維實體填充” 查看三維側視圖 旋轉查看視圖 單開實體料帶 圖層全開(關尺寸層) 圖層全開(開尺寸層) 標注角度 图元位置调整(小数点位数) 零件的俯視圖加上數量標籤 自動穿線孔 將頁碼寫入圖框,方便按頁碼打印 自動串接 云形线炸开和串接,小線段串接成平滑的圓弧或長線段 弧变圆 控制程式 sv2.arx sv2.arx sv2.arx sv2.arx s2.arx sv2.arx sv2.arx sv2.arx sv2.arx lay_on.lsp lay_on.lsp
AUTOXY ALLDEL ALLP2ALL ATAG AP1 A2T3 A2T3C BOM Bend1 B(REC) BF BCS BCP BCE BCC BCA BCMA BCM BCMM BpolyColor BEDGE BOXS_DIM BU+零件名 BU+模板名+_2 B1 B2 B3 BP CP1 CHA CH CCP CX CX1 CN CHL CL CR CT1 CCT CCK
SCC
'PKOFF
Masksm Tag_note pot tdd_dim add_tdd_group
TextTagBom
tot_page_no Text2Excel _tolerance UK
UL UCCK Version Wed wd xy_dim Ld1 auto1_dim Ld2 ADD_HOLE_NO auto11_dim VER VSFACEHIGHLIGHT WID WD X1 X11 X2 X22 XXX X3 XD2 XZ XD YD YJVER YTBOM ZZZ
KUKA培训
KUKA机器人培训教程内容一安全二安装三操作使用四编程第一章安全一要求1, 在机器人工作区域安装围栏,确保工作时无人进入;2, 在安全围栏的安全门上安装一安全开关,必须与机器人的安全回路串联;3, 在围栏上清楚贴有”危险!请勿入内”的警示牌;4,机器人的操作和维修必须由受过合格培训的技术人员承担;二训练1,需安排一人负责监视,防止意外事故发生;2,负责监视的人员能很方便地控制机器人的急停按钮;3,训练时需挂上“操作中”的牌子;4,所有学习人员不能进入机器人移动区域;5,机器人控制器必需时刻有人控制,以防止意外;6,整个训练过程中要确保机器人是在手动“T1”模式,禁止置于自动模式;三联机1,检查所有安全设施和所有其他保护功能是否有效;2,确保所有安全设施和所有其他保护功能是否有效;3,开机前确认机器人工作区域内无人或障碍物;4,一旦机器人开启,确保所有设施工作人员都知道该资讯;5,确保机器人的路径和速度是否按要求正确无误;6,机器人在自动模式时,禁止任何人员进入安全围栏;四安全标志概述在机器人上以及在控制柜内外固定有功率铭牌、警告性提示和安全标记。
在机器人和控制柜之间的连接导线上,以及机器人内外和控制柜内外的电气及其它管线上带有标识牌、有的还带有位置标记。
所有这些铭牌、提示、标记和标识都是机器人系统中至关安全性能的部件。
它们必须在各个机器人及控制柜的整个使用寿命期间清楚可见地固定在指定位置上。
严禁去除、覆盖和涂抹功率铭牌警告性提示安全标记标识牌和线路标识或者以其它的方式妨碍它们的清晰可见度。
第二章安装一机器人和控制柜请你注意,机器人和其所属的控制皆有一个系列号,该号码在控制上柜里的制造商声明中。
如果不是这样的话,机器人有可能按照错误的机器参数运行。
其后果可能是系统遭到损坏!二搬运1,机器人1.0 出于站立安全性能方面的考虑,机器人在供货是处于所谓的搬运状态VKR125 VKR15每种型号的机器人搬运角度请参照机器人脚底的不干胶标签1.1 机器人只能按照下列方法搬运:VKR6 ~~ VKR125VKR6,VKR15 VKR30 ~~ VKR125 VKR125 2,控制柜控制柜必须直立地储放、搬运和安装置放!1.0 在使用搬运套具时,必须使其挂住控制柜的所有吊环!1.1 为了能用叉车或者升降搬运,在柜子下面装有插孔。
KUKA机器人编程手册[6]
KUKA机器人编程手册KUKA编程手册一、KUKA基本概念1.1 什么是KUKA?KUKA是由德国库卡公司(KUKAAG)生产的一系列工业,广泛应用于汽车、航空、电子、医疗、消费品等行业的生产和制造过程中。
KUKA具有高精度、高速度、高灵活性、高可靠性等特点,能够满足各种复杂和多变的工作需求。
1.2 KUKA的组成部分机械臂:机械臂是KUKA的主体部分,由若干个关节和连杆构成,能够在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或夹具,以适应不同的工作任务。
控制柜:控制柜是KUKA的核心部分,负责对机械臂进行电气和逻辑控制。
控制柜内部安装了操作系统、应用软件、驱动器、电源等模块,以及与外部设备通信的接口。
操作面板:操作面板是KUKA的交互部分,用于对进行设置、编程、调试和运行等操作。
操作面板上有显示屏、按键、旋钮等元件,以及与控制柜连接的数据线。
安全设备:安全设备是KUKA的保护部分,用于防止发生故障或异常情况时造成危害。
安全设备包括紧急停止按钮、安全门、安全光栅、碰撞检测等。
二、KUKA操作系统2.1 KUKA.ControlStudio2.2 KUKA.ControlStudio主要功能项目管理:项目管理模块用于创建和管理KUKA的项目文件,包括程序文件、数据文件、配置文件MODULE 模块名声明部分语句部分ENDMODULEVAR INT a;VAR REAL b;VAR BOOL c;VAR CHAR d;VAR STRING e;VAR ENUM {red, green, blue} f; VAR STRUCT {INT x; REAL y;} g; VAR ARRAY [1..10] OF INT h; VAR POINTER TO REAL i;a := 10;b := 3.14;c := TRUE;d := 'A';e := "Hello";f := red;g.x := 1;g.y := 2.0;h[1] := 100;i := ADR(b);a := a + 1;b := b * 2.0;c := NOT c;d := TO_CHAR(65);e := e + " World";f := TO_ENUM(1);g.x := g.x 1;g.y := g.y / 2.0;h[1] := h[1] * 10;i := DREF(i);PTP {X 100, Y 200, Z 300} C_PTP; -点对点运动到绝对坐标(100,200,300)LIN REL {X -50, Y -50, Z -50} C_DIS; -直线运动到相对坐标(-50,-50,-50)CIRC {KUKA编程手册一、概述KUKAControlStudio是一个基于Windows的软件平台,用于开发和执行程序。
KUKA机器人-3-专家界面、结构化编程、KRL运动编程
在大多数情况下, 工具的作业方向是 X 轴方向。转速是 指以角度 C 绕 X 轴 旋转的速度。回转 速度则是指绕其他 两个角度 (A 和 B) 回转的速度。
40
3.3 用 KRL 进行运动编程
运动参数的功能 5. 加速度 进行 PTP 运动时: $ACC_AXIS[x] ; x=1...8,针对每个轴 进行轨迹运动 LIN 或 CIRC: $ACC.CP = 2.0 ; [m/s] 轨迹加速度 $ACC.ORI1 = 150 ; [°/s] 回转加速度 $ACC.ORI2 = 200 ; [°/s] 转动加速度
35
3.3 用 KRL 进行运动编程
运行方式 CIRC CIRC 参数说明
36
3.3 用 KRL 进行运动编程
运行方式 CIRC 2. 示例 1)机器人运动到 DAT 文件中的一个位置;该位置已事先通过 联机表单示教给机器人,机器人运行一段对应 190°圆心角的 弧段。 CIRC XP3, XP4, CA 190
19
3.2 结构化编程
子程序
20
3.2 结构化编程
缩进:程序格式,让程序更有层次,方便阅读和理解
21
3.2 结构化编程
程序流程图
1)用于程序流程结构化的工具 2)程序流程更加易读 3)结构错误更加易于识别 4)同时生成程序的文献
程序流程图图标
22
3.2 结构化编程
编程流程
23
3.3 用 KRL 进行运动编程
第3章 专家界面、结构化编程 、KRL运动编程
3.1 专家界面 3.2 结构化编程 3.3 用 KRL 进行运动编程
1
3.1 专家界面
用户组
机器人控制器可向不同的用户组提供不同的功能。可以选择以下几个用户组: