OMRON欧姆龙限位开关
欧姆龙 CJ1W-NC113 213 413 133 233 433 位置控制单元 说明书

CJ1W-NC113/213/413/133/233/433位置控制单元操作手册2003年2月修订ivv注意:欧姆龙制造的产品应根据有资格的操作者的正确程序并且仅使用本手册所描述的用途。
下面的约定用来标明在此手册中的警惕的种类。
要时刻注意有这些信息的地方。
如果不注意这些警惕会导致人和财产的伤害。
! 标明是紧急的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致死亡和严重的伤害。
! 标明是潜在的危险状态,如果不避免将会导致轻或中等伤害或者损害财产。
欧姆龙产品参考所有的欧姆龙的产品在本手册都是大写。
“Unit”这个单词在指欧姆龙的产品时也要大写,而不管它是否出现在产品的合适的名字里。
缩写“Ch,”在一些展示和欧姆龙产品出现意为“字”,表示此意时在文档中也缩写为“Wd”。
“PLC”这个缩写意思为可编程控制器。
然而,“PC” 在一些可编程设备展示时意思也为可编程控制器。
视觉教具出现在手册左栏的下面的标题用来帮助你查找不同种类的信息。
表明对于有效的和方便的操作产品尤为有影响的。
1,2,3... 1.表明一种或者另一种的列表,比如程序,校验列表等。
OMRON, 2001保留的所有的权利。
未经欧姆龙公司的许可,不得以任何形式(机械的,电子的,影印的或其它)和手段(复制,存于检索系统或传递)使用本出版物的任何内容。
未经许可不可使用 在这里的信息。
此外,欧姆龙一直努力提高它的高质量产品,本手册包含的信息如果没有注释将遭受改变。
在准备本手册时已经考虑了任何预防。
虽然如此,欧姆龙对于过失或疏忽不负任何责任。
任何使用本出版物包含的信息所导致的伤害也不负任何责任。
危险警告注意注vi预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii 1针对的对象. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv2主要预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv3安全预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiv4操作环境预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvi5应用预防措施. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvii6和EC指令兼容. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xix第1章介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1-1特点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21-2系统配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41-3基本操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51-4功能列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81-5说明书. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101-6已有型号的比较. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131-7控制系统原则. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14第2章基本步骤. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17第3章安装和连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3-1术语和功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .223-2区域分配. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233-3安装. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .243-4外部输入/输出电路. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .273-5连线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .373-6不同类型电机驱动器的连接实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .463-7未使用轴的连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .573-8伺服继电器单元. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58第4章数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 4-1总体结构. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .624-2数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .644-3公共参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .674-4轴参数区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .714-5操作存储器区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .904-6操作数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .934-7存储器操作数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .964-8区数据区域. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99第5章传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 5-1传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1025-2用写数据位写数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1095-3用读数据位读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1155-4用IOWR写数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1205-5用IORD读数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .126vii5-6保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .130 5-7用CX-Position进行数据传送 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132第6章定义原点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133 6-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134 6-2原点搜索过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135 6-3原点搜索需要的数据设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136 6-4原点搜索操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138 6-5原点搜索时间图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153 6-6当前位置预置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .158 6-7原点返回. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159 6-8Z相边缘. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161第7章直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 7-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164 7-2直接操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-3为直接操作设置数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165 7-4对直接操作的操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .167 7-5直接操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .169 7-6加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .171 7-7样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .174第8章存储操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177 8-1概要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .178 8-2存储操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-3为存储操作设定数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182 8-4定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184 8-5完成码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191 8-6线性插补. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .196 8-7传送定位序列. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .199 8-8存储操作时序图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .202 8-9加速/减速. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205 8-10样本程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .208第9章其他操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211 9-1点动. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213 9-2示教. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215 9-3中断进给. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217 9-4强迫中断. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220 9-5减速停止. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222 9-6Override. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .227 9-7偏差计数器复位输出和原点调整命令输出. . . . . . . . . . . . . . . . . . . . . . . . . . . . .230 9-8间隙补偿. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234 9-9软件限位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236 9-10停止功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239viii第10章程序实例. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241 10-1 程序例子的操作过程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24210-2存储器操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24410-3直接操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26010-4轴线性差值法. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26710-5使用极限输入来进行原点搜索. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27310-6在脉冲输出中使用Override来改变速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27510-7传送和保存数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .278第11章故障表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 11-1故障检修表格. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28611-2介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29311-3LED错误指示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29511-4读错误代码. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29711-5错误代码列表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29811-6释放脉冲输出禁止和在发生错误后复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31311-7在CPU中的错误显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31611-8用CX-Position读错误信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .316第12章维护和检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317 12-1检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-2常规检测. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31812-3预防处理. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31912-4替换PCU的步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .319附录A性能特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .321B估计对于加速/减速的时间和脉冲. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .329C公共参数区 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .331D错误码列表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .333E参数代码表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .337ix关于此手册:本手册描述了CJ1W-NC113/NC133/NC213/NC233/NC413/NC433定位控制单元的操作方法,包含下面讲述的几个部分。
OMRON-D2FC-F-7N(10M)

OMRON-D2FC-F-7N(10M)
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-D2FC-F-7N(10M)。
欧姆龙接近开关E2E-X4MD1

欧姆龙接近开关E2E-X4MD1简介欧姆龙接近开关E2E-X4MD1是一种非接触式传感器,用于检测物体是否接近开关,通常用于自动化控制系统。
该开关采用磁感应原理工作,可以识别铁质和非铁质材料。
E2E-X4MD1是欧姆龙公司生产的一款具有高可靠性和长寿命的接近开关,广泛应用于工业自动化和机器人控制系统。
构成E2E-X4MD1接近开关由四个主要部分组成:1.感应面:用于检测物体是否接近开关,通常为金属材料。
2.感应元件:用于转换感应面的信号为电信号,通常为磁敏元件。
3.电路板:用于处理并放大电信号,通常为数字电路。
4.脚座:用于连接电源和控制器,通常为插头或接线端子。
工作原理E2E-X4MD1接近开关采用磁感应原理工作。
当感应面靠近磁敏元件时,感应面产生的磁场会影响磁敏元件的磁场,从而引起感应元件中感应电动势的变化。
感应元件将变化的电信号输出到电路板上,经过电路板的处理和放大,然后输出到控制器上。
技术参数E2E-X4MD1接近开关的技术参数如下:•检测距离:4mm•接头类型:M12插座•工作电压范围:10~30VDC•感应物体:铁质或非铁质材料•最大开关频率:1000Hz•最大开关电流:200mA•最大负载电压:30VDC•工作温度范围:-25℃~70℃•保护等级:IP67应用场景E2E-X4MD1接近开关广泛应用于以下领域:1.工业自动化控制系统:可用于自动控制输送带或流水线的开关,以检测物体的位置和传送状态。
2.机器人控制系统:可用于检测机器人的位置和操作状态,以调整机器人的动作和速度。
3.食品加工和制药行业:可用于检测食品或药品的位置和状态,以保证产品质量和安全性。
4.包装行业:可用于自动控制包装机械,以准确地控制包装材料和产品的位置和数量。
总结E2E-X4MD1接近开关是欧姆龙公司生产的一款高可靠性和长寿命的非接触式传感器,采用磁感应原理工作,可以检测铁质和非铁质材料的位置和状态。
该接近开关广泛应用于工业自动化和机器人控制系统,以及食品加工、制药和包装行业。
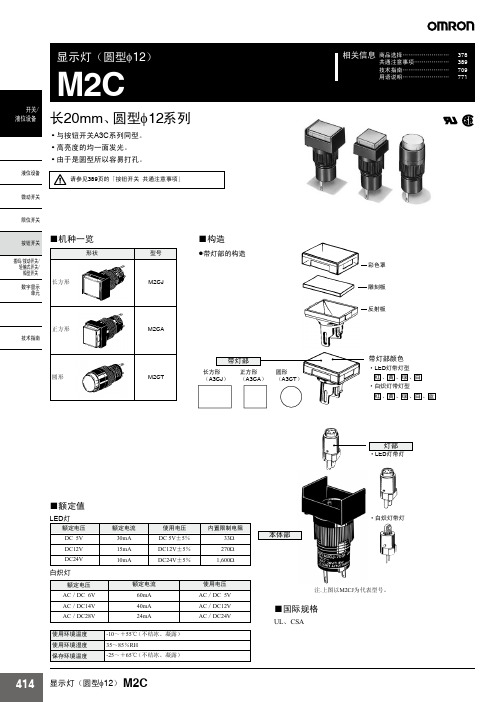
欧姆龙OMRON 显示灯 按钮开关 M2C
5.5f0.1
●请参见412页A3C的「■请正确使用」。
19.5ҹϞ
19.5ҹϞ
注.安装面板厚度应为1.0~3.2mm。
φ12
+0.2 0
19ҹϞ
φ12
+0.2 0
19ҹϞ
19ҹϞ 19ҹϞ
■参见414页…额定值 ■参见当前页…外形尺寸
显示灯(圆型f12) M2C 419
绿
A16-5DG A16-12DG A16-24DG
操作部颜色 红 黄 绿 白 蓝
A3CJ-500R A3CJ-500Y A3CJ-500G A3CJ-500W A3CJ-500A
A3CA-500R A3CA-500Y A3CA-500G A3CA-500W A3CA-500A
A3CT-500R A3CT-500Y A3CT-500G A3CT-500W A3CT-500A
A3CT-500R A3CT-500Y A3CT-500GY A3CT-500W
䰤ԡᓔ݇
ᣝ䪂ᓔ݇
ᢼⷕᢼࡼᓔ݇ 䕏㾺ᓣᓔ݇ 㠍ൟᓔ݇
᭄ᄫᰒ冫 ऩܗ
●灯部 LED
发光色 额定电压
DC 5V DC12V DC24V
红
A16-5DR A16-12DR A16-24DR
黄
A16-5DY A16-12DY A16-24DY
■单品订购型号…… 操作部·带灯部·本体部请分别订购。请组合使用无成套组合订购型号的机种。
另外,请利用在库管理的维护零件。 ●订购方法…请按下列型号。
带灯部
长方形 正方形 圆形
灯部
LED
白炽灯
本体部
长方形 正方形 圆形
带灯部
灯部(LED)
欧姆龙 DeviceNet 安全系统 配置手册

编号: Z905-CN5-02 DeivceNet Safety系统配置手册编号:Z905-CN5-02200608S01DeviceNet 安全系统配置手册编号:Z905-CN5-02DeviceNet 安全系统配置手册2006年8月修订注意:欧姆龙制造的产品由具有一定资格的人员按适当步骤使用,并只能按本手册描述的功能使用。
下列约定用于指明本手册中几类注意事项,必须按照这些要求作,否则可能引起严重的人身伤害或产品损坏。
指示潜在的危险情况,如果不能避免,将导致轻度或中度伤害,或可能导致严重的伤害甚至死亡。
另外,会造成财产损失。
指示没有特别标记情况下的一般禁止。
指示没有特别标记情况下的一般强制行为。
欧姆龙产品附注在本手册中所有欧姆龙产品都以大写字母表示。
当字“单元”表示欧姆龙产品时,它也以大写字母表示,不管它是否以产品的正式名称出现。
缩写“PLC”表示可编程序控制器。
直观标题列在本手册左侧的下列标题是帮助读者确定各种不同类型的信息。
注意事项指出为了避免动作失败,误操作或非预期的操作结果的重要操作信息。
注意指出对有效而方便地运用产品特别重要地信息。
1,2,3…指出一种或另一种地列举说明,如步骤、检查表等等。
商标和版权DeviceNet和DeviceNet安全产品是ODVA的注册商标。
在本手册中的其他产品名称和公司名称是商标或他们自己公司的注册商标。
© OMRON, 2005版权所有,事先未经欧姆龙公司书面许可,本出版物地任何部分都不可用任何形式或用任何方式(机械的、电子的、照相的、录制的)或其他方式进行复制,存入检索系统或传送。
对使用这里所包含的资料不负特许责任。
然而,因为欧姆龙公司不断努力改进其高质量的产品,所以本手册中所含有的信息可随时改变而不另行通知。
在编写本手册时注意了一切可能的注意事项,然而,欧姆龙公司对于可能的错误或遗漏不承担责任。
对于使用本出版物中所包含的信息导致的损害也不承担责任。
欧姆龙 MY 微型功率继电器 说明书

CSM_MY_DS_C_7_1微型功率继电器MY通用继电器最畅销的MY新增了回路检查用带闭锁摆杆型系列•无铅,更环保。
•取得VDE 标准(德国)认证。
•通过对AC/DC 线圈胶带颜色的改变,大大提高了AC/DC 规格的识别性。
•新增便于检查回路的带闭锁摆杆型MY(S)。
请参见“继电器共通注意事项”。
型号结构注1.表中的型号为UL/CSA 认证产品。
产品带有认证标记。
(高接触可靠型、塑料密封型、闭锁型、密闭型除外)2.表中带*的型号为新版本型号。
3.插座端子的标准型、线圈浪涌吸收用二极管型、线圈浪涌吸收用CR 回路型与PYF-E/PYFS (2极/4极)的组合符合“EC 适合宣言”。
产品带有“CE 标记”。
4.斜线部分无相应型号。
― 线部分产品的制作详情,请向经销商咨询。
关于插座端子型和插座的组合,请参见第33页上的“■选装件”中的z 连接插座、固定支架选型表。
微型功率继电器 MY2种类注1.关于订货生产规格的交货期,请向经销商咨询。
2.关于上述线圈规格以外的线圈电压型号,请向经销商咨询。
3.上述型号、规格为MY 新版本的对象产品。
4.除MY2(N)-CR 型号的上述电压规格以外,继电器高度为53mm 以下。
使用固定支架时,请参照33页进行选定。
额定规格/性能■ 额定规格z 操作线圈(标准型)注1.额定电流、线圈电阻值指的是线圈温度为+23°C 时的值。
公差为AC 额定电流+15%、−20%、DC 线圈电阻±15%。
2.AC 线圈电阻、电感的值为参考值。
(60Hz 时)3.动作特性指的是线圈温度为+23°C 时的值。
4.最大容许电压指的是环境温度为+23°C 时的值。
*1.各产品均有差异,实效值在80%以下。
为了确保正常动作,请外加额定值80%以上的电压。
(线圈温度为+23°C 时)*2.各产品均有差异,实效值在AC30%以下、DC10%以上。
为确保正常复位,请将电压降至该值以下。
欧姆龙防爆接近开关
欧姆龙防爆行程开关
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
欧姆龙防爆行程开关。
OMRON-61f-g3
OMRON-61f-g3
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON-61f-g3。
OMRON PLC介绍
信息层ETN
实时工业以太网EIP 控制层CLK
CS1W-ETN21 CS1W-EIP21-IAP CS1W-CLK21
CS1D-IAP双CPU冗余控制器的结构
冗余CPU 单元 以太网冗余 冗余电 源单元
冗余单元
CPU底板
CS1D-IAP灵活的系统配置(1)
双CPU冗余系统
BC052-IAP
P-53
P-42
工业交换机
P-35 P-37 P-35 P-47 P-39 P-35 P-35 P-41 P-35 P-49 P-45 P-35 P-35 P-54 P-43 P-35
工 业 交 换 机
P-339
控制站1
P-321 P-321 P-336 P-338 P-337 P-340
控制站2
P-325
CPU CPU
故障
运行
备用
双机操作恢复
CPU CPU
CPU CPU
CS1D-IAP系统优势
冗余电源零切换时间
50%负荷 50%负荷 50%负荷 50%负荷
控制站3
P-321 P-327 P-321
P-331
P-335
P-332
P-322
P-334
P-333
控制站n
控制站5
控制站4
CS1D-IAP系统优势
CPU运行中 其他模块正常 运行
在线单元更换
在线完成单元更换与重启
单元更换
CS1D-IAP系统优势
冗余CPU热切换
运行中 备用 不停止系统即可更换 CPU 运行
高可靠性
DPL01-IAP EIP21-IAP CPU67H-XE-IAP PA207R-IAP
欧姆龙e32zt-200
欧姆龙e32zt-200
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
欧姆龙e32zt-200。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OMRON欧姆龙限位开关
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
OMRON欧姆龙限位开关。