基于VB的液压支架四连杆运动分析程序设计
后四连杆低位放顶煤液压支架毕业设计说明书
摘要纵观世界液压支架的发展历史,从1854年英国率先研制成功了液压支架到现在,液压支架的设计研发已经基本成熟。
液压支架是机械化采煤的重要设备之一,为此对它的设计研发有重大的意义。
本次设计,通过任务书的要求,设计适用于煤层厚度为5~12米满足底板和顶板要求的的低位放顶煤液压支架。
通过对现有低位放顶煤液压支架的分析,优势对比,设计出适合的结构形式,最后对立柱、顶梁、掩护梁和底座进行了强度校核计算。
关键字:低位放顶煤液压支架;立柱;顶梁;掩护梁;底座;放煤机构。
AbstractThroughout the development of hydraulic support world history, from 1854 developed the first successful English hydraulic support to the present, hydraulic support design and development has been basically mature. Mechanized coal mining hydraulic support is one of the important equipment, for its design and development of great significance.The design, through the mission statement of requirements, design suitable for seam thickness of 5 to 12 meters to meet the requirements of floor and roof caving hydraulic support low.Through the existing low-level caving hydraulic support analysis, advantages compared to design a suitable structure, the last of columns, roof beams, beam shield, the base for the strength check calculation.Keywords: Low caving hydraulic support; column; roof beams; shield beam; base; caving agency.目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 放顶煤综采法的优缺点 (1)1.2 放顶煤液压支架的发展历史 (1)1.3 放顶煤液压支架结构的基本特点 (2)1.4 放顶煤液压支架的分类 (2)1.5放顶煤液压支架使用条件和适用范围 (3)1.5.1 放顶煤液压支架使用条件 (3)1.5.2 放顶煤液压支架适用范围 (3)第2章支架的总体方案设计 (4)2.1设计任务 (4)2.2 支架结构方案设计 (4)2.2.1 中反四连杆放顶煤液压支架 (4)2.2.2 中正四连杆低位放顶煤液压支架 (5)2.2.3 中四连杆低位放顶煤液压支架 (6)第3章液压支架的整体结构尺寸设计 (9)3.1 液压支架设计的基本要求和基本参数 (9)3.1.1液压支架的设计目的 (9)3.1.2设计时对液压支架的基本要求 (9)3.2液压支架的参数确定 (10)3.2.1 支架高度 (10)3.2.2 支架的伸缩比 (11)3.2.3 支架间距的确定 (12)3.2.4 底座长度的确定 (12)3.3 顶梁长度的确定 (13)3.3.1 顶梁的长度计算 (13)3.3.2 顶梁宽度 (14)3.3.3 顶梁覆盖率 (14)3.4立柱位置的确定 (15)3.4.1 支架立柱数的确定 (15)3.4.2 支撑方式 (16)3.4.3 立柱间距 (16)3.4.4 立柱柱窝位置的确定 (16)第4章液压支架的部件结构设计 (17)4.1 顶梁 (17)4.2 立柱 (17)4.3 掩护梁 (17)4.4 四连杆机构 (18)4.4.1 四连杆机构的作用 (18)4.4.2 四连杆机构的几何特征 (18)4.4.3 用几何作图法来设计四连杆机构 (19)4.5 底座 (23)4.6 侧护板 (23)4.7 千斤顶 (24)4.7.1 推移千斤顶 (24)4.7.2 側推千斤顶 (24)4.7.3 前梁千斤顶 (24)4.7.4护帮千斤顶 (24)4.7.5 后推移输送机千斤顶 (25)4.8 放煤机构设计 (26)第5章液压支架受力分析 (27)5.1液压支架基本技术参数的确定 (27)5.1.1支护强度 (27)5.1.2初撑力 (27)5.1.3 移驾力和推溜力 (28)5.1.4 支柱及相关液压系统参数确定 (28)5.2 液压支架立柱强度验算 (31)5.2.1已知参数 (31)5.2.2油缸稳定性计算 (32)5.2.3活塞杆的强度计算 (33)5.2.4 缸体的强度验算 (37)5.2.5液压支架主要技术参数 (37)5.3 液压支架受力分析 (38)5.3.1支架整体受力分析 (40)5.3.2 前梁受力分析 (41)5.3.3 顶梁受力分析 (41)5.3.4 掩护梁受力分析 (43)5.3.5 支架底座受力分析 (44)第6章支架强度计算 (47)6.1强度条件 (47)6.2 液压支架的强度校核 (49)6.2.1前梁梁强度校核 (49)6.2.2顶梁强度校核 (53)6.2.3 底座的强度校核 (59)6.2.4掩护梁的强度校核 (65)结论 (72)致谢 (73)参考文献 (74)CONTENTSAbstract (II)The introduction chapter 1 (1)1.1The advantages and disadvantages of the caving fully mechanized method (1)1.2The development history of the caving hydraulic support (1)1.3The basic characteristics of the caving hydraulic support structure (2)1.4 The classification of the caving hydraulic support (2)1.5The caving hydraulic support use conditions and applicable scope (3)1.5.1 The caving hydraulic support conditions of use (3)1.5.2 The caving hydraulic support scope (3)Overall design of bracket of chapter 2 (4)2.1 Design task (4)2.2 Support structure design (4)2.2.1 In the four connecting rod caving hydraulic support (4)2.2.2 Chiang kai-shek four-bar low caving hydraulic support .. 52.2.3 In the four connecting rod caving hydraulic support low 6 Chapter 3, the overall structure size of the hydraulic support design (99)3.1 The basic requirement of the hydraulic support design and basic parameters (9)3.1.1 The design of hydraulic support (9)3.1.2 The design of hydraulic support basic requirements (9)3.2 The parameters of the hydraulic support (10)3.2.1 Bracket height (10)3.2.2 Stent expansion ratio ....................... 错误!未定义书签。
(翻译)运用全局优化法对液压支架中的四杆机构的分析解读

摘要本文讨论了对四杆机构的优化分析问题,优化问题的关键通常集中在非线性规划问题上。
本方法的目标是:在铰接力保持在规定范围之内的条件下,决定机构连接长度的最优值,缩小机构耦合连接处的任意点C的运动轨迹T与既定的轨迹P之间的偏差。
全局优化的方法使用目的在于找到全局最优解。
该过程使用了自适应网格加密算法。
该算法是基于对每一次迭代的可行节点的识别,每一次迭代定义了一个解集。
把远离当前最佳解决方案的节点从解集中删除。
该算法确定的是满足预定条件的最优解的区域,而不单纯是一个最佳点。
关键词液压支架,四杆机构,全局优化,铰链力,自适应网格细化1 介绍在一些设备中,四连杆机构是一种被广泛应用于各种设备中的驱动机构,它可以提供设备所需的复杂运动并提供可靠地支撑力、加速度以及拉力。
例如控制车辆转弯的装置或用来保证矿井工作环境安全的液压支架。
由于四杆机构是一种简单的机构,三维运动分析成为一项要求严格的工作。
我们必须确定需要完成指定的运动和受力转换的各链路长度之间的比例。
图一液压支架图一所示的液压支架(Grm 1992)是采矿业中一种用于保护作业环境的设备。
本研究的目的是对先导四杆机构进行优化设计,以确保液压支架以最少的横向位移误差完成所需动作。
横向位移必须是最小是为了防止支架与其他机器设备发生碰撞。
对液压支架的运动学分析建模可以参照同步运动的驱动机构FGDE和先导机构ABDE,其中先导机构ABDE决定了液压支架的动作。
同时,此机构上铰链所承受的载荷的大小很关键。
运用全局优化法对液压支架中的四杆机构的分析Prebil, S. Kragna and I. CiglariE到目前为止,对运动学的优化分析通常是与设计敏感性分析结合在一起的(Bla 1998 2000)。
由于转化性较差和数值的无效性,传统的梯度法应用起来很不方便。
更重要的是,我们可以推断机构铰接处的铰接力的影响比先导机构的公差影响更大。
为了克服上述方法的种种缺点,我们引入全局优化法。
基于VB的平面四杆机构计算机辅助设计
基于VB的平面四杆机构计算机辅助设计
张祁莉
【期刊名称】《机电一体化》
【年(卷),期】2008(14)6
【摘要】运用VB可视化编程语言,根据两连架杆对应的位置,设计平面四杆机构。
该软件界面友好,方便直观,可用于实际工程设计,又可运用到教学中,提高教学效果。
【总页数】2页(P56-57)
【关键词】连架杆;VB;封闭多边形
【作者】张祁莉
【作者单位】五邑大学机电工程系
【正文语种】中文
【中图分类】TH112.1;TP391.72
【相关文献】
1.基于VB和ADAMS的平面四杆机构连杆曲线的仿真与分析 [J], 段守勇;孙涛;丁泽
2.平面铰链四杆机构计算机辅助设计及组合程序 [J], 王文博;陈明艳
3.基于VB的平面四杆机构运动分析与仿真轨迹 [J], 谭兆;聂时君;贺丰炎;胡士发;贺宗宝
4.平面四杆机构的计算机辅助设计 [J], 桑应禹;左晓明
5.基于Access和VB的平面四杆机构轨迹综合的屏幕拟合法 [J], 武丽梅;刘连平
因版权原因,仅展示原文概要,查看原文内容请购买。
液压支架连杆机构的设计

D = - 2l6
(6)
E = l25 + l26 - l24
掩护梁端点的运动轨迹是一近似直线的双扭
线, 如图 2 所示。最高点A 和最低点B 的连线和轨 迹曲线的交点 C 是一关键点。 若能使 C 点略高于 A E 线的中点, 梁端距就不会超过规定的界限 (∆≤70 ~ 100mm ) , 即
y C = y E + 016 (y A - y E ) = 016yA + 014y E
(7)
3 连杆机构的设计
正确设计的液压支架连杆机
构, 当工作高度在最大值和最小值
规定的范围内变化时, 掩护梁的倾
角和后连杆的倾角都能满足要求,
掩护梁端距的变动量不超过 70~
100mm , 且支架的重量轻。支架各
E 点作相交直线, 求出 l1 和 l2 的范围 l1m ax , l1m in , l2max ,
l2m in, 如图 3 所示。 (4) 按式 (7) 确定 C 点的坐标, 如图 2 所示; (5) 参照同类型支架初取适当的 l3 和 Υ, 找出N
点与A 、C、E 点相应的 3 个位置, 并求出通过这 3 个位置的圆弧的中心和曲率半径, 即可求得 l4, l5, l6。
文章编号: 1003- 5923 (2001) 01- 0047- 02
液压支架连杆机构的设计
诸世敏
(湘潭工学院 机械工程系, 湖南 湘潭 411201)
摘 要: 对液压支架连杆机构各构件的几何关系及设计方法等进行了研究。指出支架连杆机构的设计应 使支架有较大的调高范围, 并有利于提高支撑力和支撑效率, 平面连杆机构的瞬心应尽量靠近顶梁平面, 以 减少支撑力的波动, 侧向力应指向采空区, 以增加支架的稳定性, 且支架的重量较轻。
给定位置设计四连杆机构的方法

给定位置设计四连杆机构的方法
设计四连杆机构的方法可以有多种,以下是其中一种常见的方法:
1. 定义机构的要求和运动轨迹:首先确定机构所需完成的任务和要求,例如运动的轨迹、速度、加速度等。
2. 确定关键点和固定点:根据所需运动轨迹,确定关键点和固定点。
关键点是机构中需要移动的点,固定点是机构中位置固定不动的点。
3. 选择连杆比例:根据机构的要求和运动轨迹,选择合适的连杆比例。
连杆比例是各连杆长度的比值,可以通过解析几何或者图解法确定。
4. 绘制初始示意图:根据选择的连杆比例和关键点,画出初始的机构示意图。
示意图可以是用平面图或者3D模型表示。
5. 进行运动分析:使用运动分析方法,如连杆运动分析、速度分析、加速度分析等,来分析机构的运动特性,确保机构满足要求。
6. 进行校核和优化:对机构的各部件进行校核和优化,确保满足强度、刚度、耐久性等方面的要求。
7. 进行机构仿真:使用计算机辅助设计软件进行机构的虚拟仿真,验证机构的运动性能和可行性。
8. 进行实物制造和测试:根据设计结果,进行实物制造和测试,检验机构的实际性能和可靠性。
以上是一个基本的设计过程,具体设计方法还会因应用领域和要求的不同而有所差异。
设计四连杆机构需要结合工程设计知识和实践经验,综合考虑运动学、动力学、材料力学等多个方面的问题。
四连杆机构运动分析
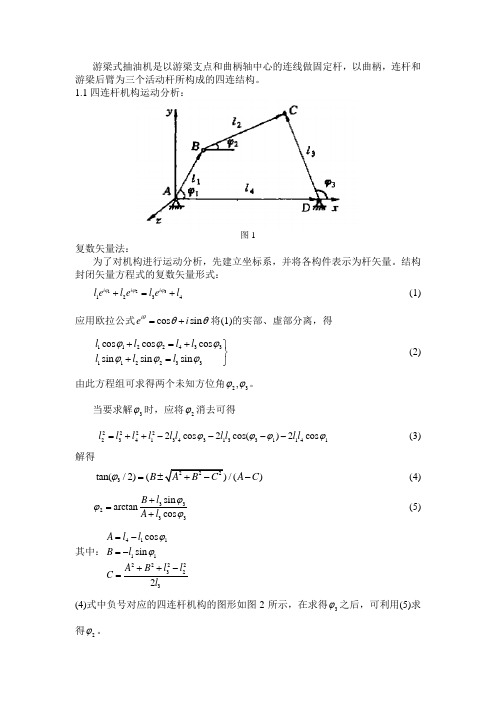
游梁式抽油机是以游梁支点和曲柄轴中心的连线做固定杆,以曲柄,连杆和游梁后臂为三个活动杆所构成的四连结构。
1.1四连杆机构运动分析:图1复数矢量法: 为了对机构进行运动分析,先建立坐标系,并将各构件表示为杆矢量。
结构封闭矢量方程式的复数矢量形式:3121234i i i l e l e l e l ϕϕϕ+=+ (1)应用欧拉公式cos sin i e i θθθ=+将(1)的实部、虚部分离,得1122433112233cos cos cos sin sin sin l l l l l l l ϕϕϕϕϕϕ+=+⎫⎬+=⎭(2)由此方程组可求得两个未知方位角23,ϕϕ。
当要求解3ϕ时,应将2ϕ消去可得2222234134313311412cos 2cos()2cos l l l l l l l l l l ϕϕϕϕ=++---- (3)解得2223tan(/2)()/()B A B C A C ϕ=+-- (4)33233sin arctancos B l A l ϕϕϕ+=+ (5)其中:411112222323cos sin 2A l l B l A B l l C l ϕϕ=-=-++-=(4)式中负号对应的四连杆机构的图形如图2所示,在求得3ϕ之后,可利用(5)求得2ϕ。
图2由于初始状态1ϕ有个初始角度,定义为01ϕ,因此,我们可以得到关于011t ϕϕω=+,ω是曲柄的角速度。
而通过图形3分析,我们得到OA 的角度0312πθϕϕ=--。
因此悬点E 的位移公式为||s OA θ=⨯,速度||ds d v OA dt dtθ==,加速度2222||dv d s d a OA dt dt dtθ===。
图3已知附录4给出四连杆各段尺寸,前臂AO=4315mm ,后臂BO=2495mm ,连杆BD=3675mm ,曲柄半径O ’D=R=950mm ,根据已知条件我们推出''||||||||OO O D OB BD +>+违背了抽油系统的四连结构基本原则。
第三章 四连杆之MATLAB程式
第三章四連桿之MATLAB程式第三章中之四連桿分析可以參考相關資料。
本節則針對四連桿之動作程式加以說明。
目前所設計之程式有f4bar.m、drawlinks.m、fb_angle_limits.m、drawlimits.m 等四個程式,茲分別說明如下:圖一、四連桿之關係位置及各桿名稱一、f4bar函數:f4bar函數之呼叫格式如下:function [values,form] = f4bar(r,theta1,theta2,td2,tdd2,sigma,driver)輸入變數:.r(1:4) = 各桿之長度,r(1)為固定桿,其餘分別為曲桿、結合桿及被動桿。
.theta1 = 第一桿之水平角,或為四連桿之架構角,以角度表示。
.theta2 = 驅動桿之水平夾角,以角度表示。
一般為曲桿角,但若為結合桿驅動,則為結合桿之水平夾角。
.td2 = 驅動桿(第二桿或第三桿)之角速度(rad/sec)。
.tdd2 = 驅動桿(第二桿或第三桿)之角加速度(rad/sec^2)。
.sigma = +1 or -1. 組合模式,負值表示閉合型,正值為分支型,但有時需視實際情況而定。
.driver = 0 (驅動桿為第二桿); 1 (驅動桿為第三桿)輸出變數:.form = 組合狀態,0 :表示無法組合;1:可以正確組合.values = 輸出矩陣,其大小為 4 X 7,各行之資料分配如下:其中第一行之連桿位置向量,屬於單桿的位置向量。
第二行為各桿之水平夾角,第三及第四行為各桿之角度速度及角加速度。
第五至七行則為P點與Q點之速度與加速度量,第五行為向量,第六行為絕對量,第七行為夾角。
值得一提的是第一行、三行、四行及五行之向量表示法屬於複數之型式。
故若要得到其絕對值僅需在MATLAB指令檔中,以abs()這一個函數指令即可求得,而以函數angle()則可求得其夾角,雖然第二行與第七行之輸出亦有相對應之夾角。
例一:為第二桿為驅動桿[val,form]=f4bar([3 2 4 2],0,60,10,0,-1,0)val = Columns 1 through 33 0 01 + 1.7321i 60 103.8682 - 1.0182i -14.7465.40781.8682 + 0.71389i 20.913 16.549 Columns 4 through 60 1 + 1.7321i 20 1.8682 + 0.71389i 2-127.58 173.21 - 100i 200-236.27 364.19 - 953.09i 1020.3 Column 76020.913-30-69.087form = 1 (表示可以組合)本例中,有框線者表示其為輸入值。
基于matlab的平面四连杆机构设计以及该机构的运动分析参考模板
基于matlab的平面四连杆机构设计以及该机构的运动仿真分析摘要四连杆机构因其结构方便灵活,能够传递动力并实现多种运动形式而被广泛应用于各个领域,因此对其进行运动分析具有重要的意义。
传统的分析方法主要应用几何综合法和解析综合法,几何综合法简单直观,但是精确度较低;解析法精确度较高,但是计算工作量大。
随着计算机辅助数值解法的发展,特别是MATLAB软件的引入,解析法已经得到了广泛的应用。
对于四连杆的运动分析,若应用MATLAB 则需要大量的编程,因此我们引入proe软件,我们不仅可以在此软件中建立实物图,而且还可以对其进行运动仿真并对其运动分析。
在设计四连杆时,我们利用解析综合法建立数学模型,再根据数学模型在MATLAB中编程可以求得其他杆件的长度。
针对范例中所求得的各连杆的长度,我们在proe软件中画出其三维图(如图4)并在proe软件中进行仿真分析得出CB,的角加速度的变化,从而得到CB,两接触处所受到的力是成周期性变化的,可以看出CB,两点处的疲劳断裂,我们提B,两点处极易疲劳断裂,针对C出了在设计四连杆中的一些建议。
关键字:解析法 MATLAB 软件 proe 软件 运动仿真建立用解析法设计平面四杆机构模型对于问题中所给出的连架杆AB 的三个位置与连架杆CD 的三个位置相对应,即三组对应位置为:332211,,,,,ψϕψϕψϕ,其中他们对应的值分别为: 52,45,82,90,112,135,为了便于写代数式,可作出AB 与CD 对应的关系,其图如下:图—2 AB 与CD 三个位置对应的关系通过上图我们可以通过建立平面直角坐标系并利用解析法来求解,其直角坐标系图如下:φααi θi φi图—3 平面机构直角坐标系通过建立直角坐标系OXY ,如上图所示,其中0α与0φ为AB 杆与CD 杆的初始角,各杆件的长度分别用矢量d c b a ,,,,表示,将各矢量分别在X 轴与Y 轴上投影的方程为⎩⎨⎧=++=+)sin(*)sin(*)sin(*)cos(*)cos(*)cos(*φθαφθαc b a c d b a在上述的方程中我们可以消除θ,从而可以得到α与φ之间的关系如下:)cos(2)cos(2)cos(2)(2222αφαφab ac cd b d c a +-=+-++ (1) 为便于化简以及matlab 编程我们可以令:⎪⎪⎪⎩⎪⎪⎪⎨⎧==-++=c d H a d H ac b d c a H 32222212 (2) 通过将(2)式代入(1)式中则可以化简得到如下等式: )cos()cos()cos(321αφαφH H H +-=+ (3)我们可以通过(3)式将两连架杆对应的位置带入(3)式中,我们可以得到如下方程:⎪⎩⎪⎨⎧+-=++-=++-=+)cos()cos()cos()cos()cos()cos()cos()cos()cos(333332123222211311121ϕψϕψϕψϕψϕψϕψH H H H H H H H H (4) 联立(4)方程组我们可以求得321,,H H H ,再根据(2)中的条件以及所给定的机架d 的长度,我们可以求出其它杆件的长度为:⎪⎪⎪⎩⎪⎪⎪⎨⎧-++===1222322acH d c a b H d c H d a (5)四连杆设计范例:在日常生活中,我们经常看到消防门总能自动关上,其实它是利用四连杆机构与弹簧组成的。
基于matlab的平面四杆机构运动分析_毕业论文
……………………. ………………. …………………毕业论文基于MATLAB的平面四杆机构运动分析院部机械与电子工程学院装订线……………….……. …………. …………. ………摘要 (I)Abstract (II)1 绪论 (1)2 平面四杆机构运动分析 (2)2.1 平面四杆机构简介 (2)2.2 平面四杆机构类型分析 (3)2.3 建立平面四杆机构的数学模型 (4)2.3.1 建立平面四杆机构的封闭矢量位置方程式 (4)2.3.2 运用矢量法和矩阵法求解封闭矢量方程式 (5)2.3.3 求解过程涉及的数学、物理计算方法 (6)3 基于MATLAB 的运动分析程序设计 (7)3.1 MATLAB简介 (7)3.2 程序设计流程 (8)3.3 编写程序的M文件 (10)3.3.1编写fun函数 (10)3.3.2编写主程序 (10)3.4 程序运行输出结果 (12)4 基于MATLAB的GUI分析系统设计 (15)4.1 GUI简介 (15)4.2 GUI界面设计 (15)4.3 GUI代码编写 (16)4.3.1 Edit Text代码编写 (16)4.3.2 Pop-up Menu代码编写 (16)4.4 GUI分析系统运行效果 (17)5 结论 (18)参考文献 (20)致谢 (20)附录 (20)附录一主函数程序代码 (20)附录二popupmenu4_Callback函数下程序代码 (23)Abstract (II)1 Introduction (1)2 The analysis of motion for planar four-bar mechanism (2)2.1 Intoduction to the planar four-bar mechanism (2)2.2 Analysis for the types of planar four-bar mechanism (3)2.3 Build the mathematical model of planar four-bar mechanism (4)2.3.1 Build the closed position vector equation for planar four-bar mechanism (4)2.3.2 Apply the vector & matrix method to solve the closed vector equation (4)2.3.3 Mathematical & physical calculation method involved in the solving process (5)3 The program design for the motion analysis based on MATLAB (7)3.1 Introduction to MATLAB (7)3.2 The program design process (7)3.3 Write the M-file for program (9)3.3.1 Write the fun function (9)3.3.2 Write the main function (9)3.4 The output of running the program (11)4 The design of GUI analysis system based on MATLAB (14)4.1 Introducton to GUI (14)4.2 The interface design of GUI (14)4.3 Write the GUI code (15)4.3.1 Write the Edit Text code (15)4.3.2 Write the Pop-up Menu code (15)4.4 The running effect of the GUI analysis system (16)5 Conclusion (19)References (20)Acknowledgement (21)Appendix (22)Appendix I The main function code (22)Appendix II The popupmenu4_Callback function code (25)基于MATLAB的平面四杆机构运动分析摘要:建立以平面四杆机构为研究对象的数学模型,以MATLAB软件为载体,利用MATLAB矩阵数据分析处理功能,设计了平面四杆机构运动分析程序。
基于MATLAB给定连杆预定位置的四杆机构设计
第14卷第2期2019年6月Vol.14No.2Jun.2019陕西工业职业技术学院学报Journal of Shaanxi Polytechnic Institute基于MATLAB给定连杆预定位置的四杆机构设计韩二豹(陕西工业职业技术学院土木工程学院,陕西咸阳712000)摘要:连杆机构是一种典型的机械机构,运动设计是一个比较复杂和困难的问题,给定连杆预定位置的四杆机构的设计常用的设计方法主要为解析法。
本文以MATLAB语言为基础,利用计算机对给定连杆预定位置的四杆机构进行设计。
结果表明,此方法设计过程简洁,结果合理,准确,效率高。
关键词:四杆机构;MATLAB;预定位置中图分类号:TB121文献标识码:A文章编号=9459-2019(2)-0006-03A MATLAB-based Design of Four-bar Linkage with PresetPosition of Connecting RodHan Erbao(School of Civil Engineering,Shaanxi Polytechnic Institute,Xianyang Shaanxi712000,China)Abstract:Connecting rod is a typical mechanical linkage and its motion design is complex and ually, analytical method is the main method used in the design of four一bar linkage with preset position of connecting rod. In the study,a MATLAB一based design of four bar mechanism was made to link the preset position given by com・puter.The results show that the design process is simple Key words:Four bar linkage;MATLAB;Preset positiono引言MATLAB是一种高级技术语言和发展环境,特提供了一个人机交互的系统环境,并以矩阵作为基础的数据结构,节省编程时间,语法简单、容易掌握、调试方便,可以设置调试断点、快速查找程序错误等优点,可以将使用者从繁重重复的计算中解脱出来,已经被大家认可和广泛使用,充分展现其高效、直观、简单的特点⑷。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于VB的液压支架四连杆运动分析程序设计
基于VB程序为编程平台,开发出一套可视界面的四连杆运动分析程序;实现对四连杆各个运动阶段的参数化设计,并计算出顶梁运动轨迹和双扭线最大横向摆幅;可以减轻设计人员出差配套时的劳动强度,提高前期設计效率;
标签:液压支架;四连杆;运动分析;VB软件计算
1 引言
液压支架的设计重点主要取决于四连杆机构,根据液压支架的运动分析,合理的四连杆设计可以保证支架的结构稳定性和整体刚度,直接决定了顶梁的运动轨迹与掩护梁的运动姿态;同时四连杆机构设计是否合理直接导致支架前、后连杆的受力分布;设计的四连杆机构应该使支架顶梁前端点的运动轨迹呈近似直线,且支架整个伸收阶段顶梁前端点运动轨迹的最大横向摆幅应尽可能小;更好的提高对顶板的管理性能,使支架能承受较大的水平力。
目前液压支架的设计主要采用OPT软件、迈实软件、三维设计软件等方式;OPT主要鉴于系统、界面更新换代不支持等问题基本不再采用;迈实软件主要为购买为网络加密版,个人外地出差无法使用等问题;三维设计软件主要有采用Pro/E、SW、SE直接分析设计;本程序采用绿色小程序主要为用户提供界面友好、操作方便实现对四连杆机构各个高度位置的参数化计算;
2 四连杆动作原理
本文从液压支架四连杆机构运动学分析的基础出发,先以支架后连杆水平倾角为自变量X,并列出各个运动函数方程如下:
依上图所示,以四连杆机构两个极限位角,以后连杆FH倾角X为自变量推导出液压支架运动学分析的所有公式,以0.0001弧度為循环步距,将上面各函数方程调用计算出已设置支架高度参数的极限角度。
3 程序设计实现
下图为基于VB编程平台,开发出的可视界面的四连杆运动分析程序;实现对四连杆各个运动阶段的参数化设计,并计算出顶梁运动轨迹和双扭线最大横向摆幅;通过使用该程序可以减轻设计人员出差配套、做方案时的劳动强度,提高前期设计效率。
下面以ZZ11000/24/50D型支撑掩护式液压支架四连杆机构设计为例,说明该程序的设计和操作过程。
(1)参数输入模块:可按要求将已知Hmax、Hmin、OF、BE、BO、FH、EG、HL、HG、HL、GU、LM、MQ、PM、PD、AC、RO、AB参数填入相应
栏内待分析计算。
(2)功能选项模块:包括动作分析、导入、导出、清除、退出、测试按钮;点击动作分析按钮,开始从最低位到最高位运动仿真,并计算出顶梁前端点双扭线运动轨迹、最大横向摆幅。
(3)具体高度测试模块:在设计人员进行某高度(50mm的倍数)的动作姿态及放样时,在测试栏输入所需高度后点击测试按钮,相应在运动参数模块中显示出前连杆水平角、后连杆水平角、掩护梁背角、前后连杆夹角、瞬心角、瞬心距、L到E水平距离、L到E垂直距离等参数进行初稿放样;并且依次输入最高、最低高度时运动状态显示图上会显示出后立柱的最大、最小极限尺寸,若要得前立柱的参数需分别在PM、PD、AC、AB各参数栏填入前立柱位置参数计算即可;
(4)导入导出模块:点击导出按钮后,会弹出另存为对话框,将信息参数输入数据按txt格式保存;以备后期存档或调用查看。
点击导入按钮后,会弹出打开对话框,供设计人员选择已保存的txt文件进行导入至信息参数输入模块,方便设计人员及时验算用;既可在信息参数输入模块直接输入数据方式,也可按导入txt数据文件方式计算,期间可以根据设计意图临时更改输入的参数进行分析。
4 结语
本程序实现了四连杆的参数化设计,可视化操作界面使设计参数一目了然,并且绘制出顶梁前端点及瞬心点的运动轨迹、同时计算出最大横向摆幅;避免出差在外无法使用迈实软件的窘境,而且计算结果可靠,经验证与迈实软件计算数据误差很小,可以起到临时代替的作用,操作方便易用,入手很快,无需学习过程,不受操作系统限制,适用所有windows98以上系统。
谨希望有更多的专业技术人员能够予以启发,针对制造设计过程开发的的优化程序来代替设计人员工作、服务企业。