空间矢量脉宽调制(SVPWM)的开环讲解
SVPWM电压矢量控制ppt课件

2 3
(u
A
uBe j
uCe j2
)
13
8个基本空间矢量
PWM逆变器共有8种工作状态
当 SA SB SC 1 0 0
uA
uB
u
C
Ud 2
Ud 2
Ud 2
u1
2 Ud (1 e j e j2 ) 32
2
Ud
j 2
(1 e 3
j 4
e 3
)
32
2 Ud [(1 cos 2 cos 4 ) j(sin 2 sin 4 )]
3
2 Ud (1 j 3) 32
2U 3
d
e
j
3
依此类推,可得8个基本空间矢量 。
15
8个基本空间矢量
6个有效工作矢量
u1 u6
幅值为
2U 3
d
空间互差
3
2个零矢量 u0、u7
16
基本电压空间矢量图
图5-24 基本电压空间矢量图
17
正六边形空间旋转磁场
6个有效工作矢量 u1 u6
顺序分别作用△t时间,并使
SPWM的基波线电压最大幅值为
U' lm m ax
3U d 2
两者之比
U lm max U'
lm m ax
2 1.15 3
SVPWM方式的逆变器输出线电压基波最大 值为直流侧电压,比SPWM逆变器输出电压 最多提高了约15%。
33
SVPWM的实现
通常以开关损耗和谐波分量都较小为 原则,来安排基本矢量和零矢量的作用 顺序,一般在减少开关次数的同时,尽 量使PWM输出波型对称,以减少谐波 分量。
Ud
SVPWM的原理及法则推导和控制算法详解
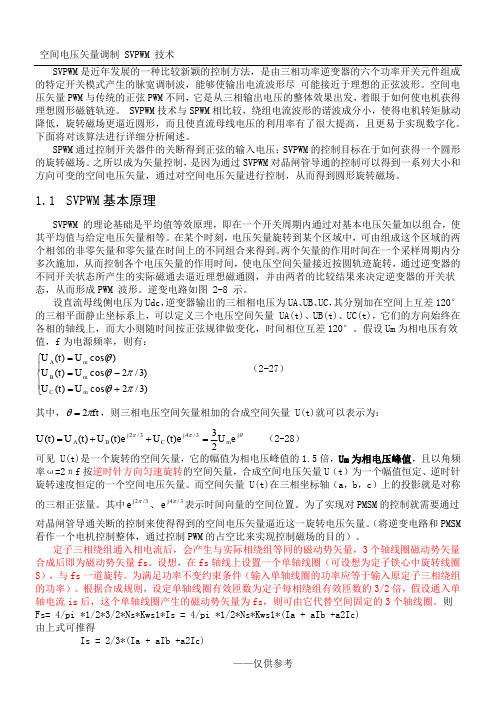
空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U (t )为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
SVPWM的原理讲解以及应用过程中的推导与计算
SVPWM的原理讲解以及应用过程中的推导与计算SVPWM(空间矢量调制技术),是一种电机调速技术,通过在三相电流中引入一个辅助电流,将三相电流分解为一个基础正弦波电流和一个辅助电流,然后根据基础正弦波电流和辅助电流的大小和相位关系,控制电机输出的磁场方向和大小。
SVPWM可以提高电机的效率和控制精度,并减小电机的振动和噪音。
1.电机模型分析:首先,对电机进行建模和分析。
通过将电机抽象为一个旋转矢量图,分析电机的磁场分布和电流控制。
2.空间矢量图:根据电机模型分析,可以得到电机的矢量图。
矢量图用于描述电机的磁场方向和大小,有助于理解电机的运行原理。
3.矢量控制:根据矢量图,可以控制电机的磁场方向和大小。
通过控制电流矢量的大小和相位关系,可以控制电机的输出磁场。
4.空间矢量调制:SVPWM通过将电流矢量分解为一个基础正弦波电流和一个辅助电流,再根据它们的大小和相位关系,控制电机的输出磁场。
辅助电流可以用来改变电机的输出磁场方向,基础正弦波电流用来控制电机的输出磁场大小。
5.SVPWM计算:为了实现SVPWM,需要对电流进行计算和控制。
首先,根据需要的输出磁场向量,计算出对应的辅助电流和基础正弦波电流。
然后,根据电机的控制策略,计算出实际的电流指令。
在计算辅助电流和基础正弦波电流时,可以采用矢量旋转和空间矢量分解的方法。
通过将输出磁场向量进行数学运算和变换,可以得到电流矢量的大小和相位。
具体的计算过程可以按照以下步骤进行:1.确定需要的输出磁场向量的大小和相位。
2.将输出磁场向量进行矢量旋转和变换,得到一个新的矢量。
矢量旋转和变换的具体方法可以根据电机的控制策略和转子位置来确定。
3.将新的矢量分解为一个基础正弦波电流和一个辅助电流。
辅助电流用于改变输出磁场的方向,基础正弦波电流用于控制输出磁场的大小。
4.根据基础正弦波电流和辅助电流的大小和相位关系,计算出实际的电流指令。
根据电机的控制策略,可以使用速度环、电流环等控制器来计算输出的电流指令。
svpwm的调制原理及其应用
SVPWM的调制原理及其应用1. 什么是SVPWM(Space Vector Pulse Width Modulation)调制法?SVPWM是一种常用于交流电力电子变换器中的调制技术。
它通过控制电压的矢量和宽度,以实现对电机的精确控制。
SVPWM调制法具有高效、精确以及低谐波的优点,被广泛应用于电机驱动和变频器控制系统中。
2. SVPWM的原理SVPWM的原理基于空间矢量图。
在三相交流电系统中,通过控制三个相电压,可以产生一个旋转的磁场。
SVPWM将矢量分解为两个相邻矢量和一个零矢量来表示,通过适当的矢量合成和特定的PWM技术,可以实现电机的精确控制。
SVPWM的基本原理如下:1.将输入的三相电压转换为旋转矢量。
2.计算出所需的电机磁通矢量。
3.将磁通矢量分解为相邻矢量和零矢量。
4.通过调整相邻矢量的宽度,控制电流大小。
5.通过控制PWM波形的频率和占空比,控制电机输出的转速。
3. SVPWM的应用SVPWM调制技术在电机驱动和变频器控制系统中得到了广泛应用。
以下是SVPWM调制法的几个常见应用:3.1 电机驱动SVPWM技术可以精确控制三相电机的转速和转矩。
通过调整矢量合成和PWM 波形,可以实现电机的平稳运行,并且降低失去步的风险。
此外,SVPWM调制法还能够减小电机运行时的噪音和振动。
3.2 变频器控制系统SVPWM调制技术被广泛应用于变频器控制系统中。
变频器可以将输入电源的频率和电压转换为所需的输出,以满足不同的负载需求。
SVPWM调制法能够提供高效、可靠的控制方式,使得变频器能够有效地控制负载。
3.3 电网接口SVPWM技术还可以应用于电网接口中。
电网接口是将分布式能源(如太阳能、风能)与电网进行连接的装置。
SVPWM调制技术可以控制电能的输入和输出,实现电网与分布式能源的平衡,并确保电网的稳定运行。
3.4 可再生能源系统在可再生能源系统中,如风力发电、太阳能发电等,SVPWM调制技术可以有效管理电能的转换和输送。
SVPWM的原理及法则推导和控制算法详解
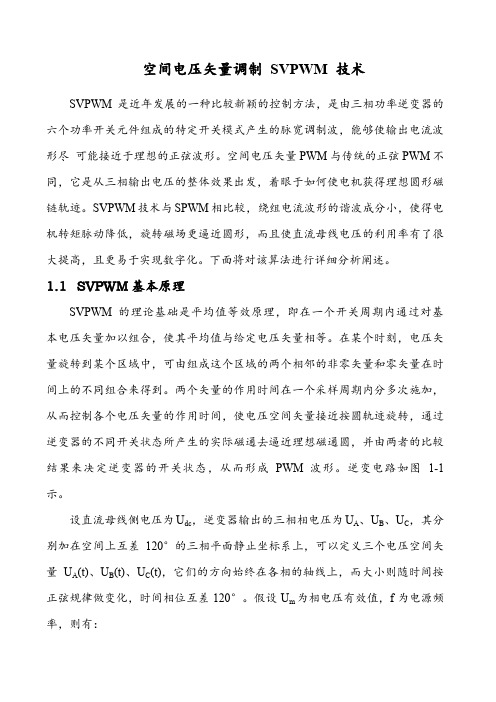
空间电压矢量调制SVPWM 技术SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图1-1 示。
设直流母线侧电压为U dc,逆变器输出的三相相电压为U A、U B、U C,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量U A(t)、U B(t)、U C(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设U m为相电压有效值,f为电源频率,则有:()cos()()cos(2/3)()cos(2/3)A mB m Cm U t U U t U U t U θθπθπ=⎧⎪=-⎨⎪=+⎩ (1-1)其中,2ft θπ=,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:2/34/33()()()()2j j j A B C m U t U t U t e U t e U e ππθ=++=(1-2)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,U m 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c)上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解

SVPWM的原理及法则推导和控制算法详解SVPWM全称为Space Vector Pulse Width Modulation,是一种用于交流电驱动的脉宽调制技术。
它通过对电压波形进行合适的调制,实现对交流电驱动变频器输出电压的精确控制。
以下是SVPWM的原理及法则推导和控制算法的详解。
1.原始正弦信号:首先,将三相交流电压信号转化为矢量信号表示。
当输入的三相正弦信号为:$$v_a=v_m\sin(\Omega t)$$$$v_b=v_m\sin(\Omega t - \frac{2\pi}{3})$$$$v_c=v_m\sin(\Omega t + \frac{2\pi}{3})$$其中,$v_m$为幅值,$\Omega$为频率,t为时间。
2.空间矢量表示:将交流信号的三相信号进行矩阵变换,转化为空间矢量表示,例如:$$V_s=\frac{2}{3}\begin{pmatrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \sqrt{3}/2 & -\sqrt{3}/2\end{pmatrix}\begin{pmatrix} v_a\\ v_b\\ v_c \end{pmatrix}$$其中,$V_s$表示空间矢量表示。
3.空间矢量模量:空间矢量模量的大小表示输出电压的幅值,可以通过以下公式计算:$$V=\sqrt{V_s^2}=\sqrt{V_a^2 + V_b^2 + V_c^2}$$4.空间矢量相位:空间矢量相位表示输出电压的相位位置,可以通过以下公式计算:$$\theta=\tan^{-1}(\frac{V_b}{V_a})$$5.确定电压矢量分量:根据设定的输出电压幅值和相位,可以计算出两个主要输出电压分量$V_d$和$V_q$,分别代表感应电机电流的直流成分和交流成分。
6.电压矢量分解:通过将输出电压分解为两个主要分量$V_d$和$V_q$,可以表示为:$$V_d=V_s\cos(\theta - \gamma)$$$$V_q=V_s\sin(\theta - \gamma)$$其中,$V_s$为空间矢量模量,$\theta$为空间矢量相位,$\gamma$为极坐标相角,用来调整电压波形的对称性。
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究
- 41 -
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究
作者: 作者单位: 刊名: 陈娜, 李杨声, 李福瑞, 王程勇 湖北三江航天红峰控制有限公司,湖北 孝感,432001 科技创新与应用
英文刊名: 年,卷(期):
科技创新与应用
永磁同步电机的空间矢量脉宽调制 (SVPWM) 原理及仿真研究
陈 娜 李杨声 李福瑞 王程勇 湖北 孝感 432001) (湖北三江航天红峰控制有限公司,
克服了直流伺服电动机机械式换向器和电刷 摘 要: 永磁同步电机在伺服控制系统应用中得了迅速的发展, 其优越的调速性能, 带来的一系列限制。文章主要介绍了空间矢量脉宽调制原理及算法流 程;在 Matlab7.6.0\simulink 建模仿真 平台 上搭建了基于 且对模型进行了系统仿真。 SVPWM 算法的永磁同步电机控制系统的仿真模型, 算法; 仿真 关键词: 永磁同步电机; 1 引言 正弦脉宽调制 (SPWM) 随着电力电子的发展, 在交流调速系统中得 到了广泛应用,经典的 SPWM 控制主要是将电压变频器的输出电压尽 同时, 还产生高次谐波分 量接近正弦波, 但并未估计输出电流的波形, 量引起电动机发热、转矩脉动,甚至使系统振荡。而电压矢量控制 (SVPWM) 是从输出电压的角度出发, 目的在于可以生成一个可以调频 调压的三相对称正弦供电电源,SVPWM 是一种优化的 PWM 控制技 降低 术, 能明显减小逆变电路输出电流的谐波成分及电机的谐波损耗, 电压利用率高, 在交流伺服系 转矩脉动, 且其控制简单, 数字实现方便, 统中得了广泛应用。 本文将详细介绍基于 SVPWM 的原理以及永磁同步电机控制算 用 Matlab7.6.0\simulink 软件进行建模、 仿真。 法, (SVPWM) 2 空间矢量脉宽调制 原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁 磁链矢量的运动轨迹形成圆形的 链空间矢量幅值恒定, 并以恒速旋转, 所以只要按照跟踪 空间旋转磁场 (磁链圆) , 从而产生恒定的电磁转矩, 圆形旋转磁场来控制逆变电路向交流电动机提供可变频电源,并能保 “磁链圆” “磁链跟踪控制” 证电动机形成定子 , 这种控制方法称作 , 磁链 所有又称 “电压空间矢 的轨迹是交替使用不同的电压空间矢量得到的, 即 SVPWM” 量 PWM 控制, 。 三相逆变电路输出状态共有 8 种开关模式,其中 000 和 111 开关 模式时逆变电路电压输出为零, 这两种开关模式成为零状态。所以有效 开关模式为 6 种,由 6 种开关模式和线电压的关系可以得出基本电压 见图 1, 空间矢量, 相邻空间矢量的矢量间隔为 60毅, 而两个零矢量幅值 为零, 位于中心。 当六个非零空间矢量单独输出后,定子磁链矢量的矢端的运动轨 如果能把正六 迹就是一个正六边形, 而我们需要的是圆形的运动轨迹, 就越接近圆形, 按照这个思路, 边形变成正多边形, 正多边形的边越多, 我们必须使得三相逆变器有更多的开关状态,一种方法是利用六种基 本空间电压矢量的线性时间组合来得到更多的开关状态。根据参考输 出电压矢量的区间位置,选择与之相邻的基本电压空间矢量来合成参 图 2 为电压空间矢量的线性组合。t1 和 t2 分别是 UX 考输出电压矢量, 在每一个 T 期间, 和 UX+60 作用时间, T 是 Uref 作用时间, 都改变相邻基 故当 T 本矢量作用时间, 并保证所合成的电压空间矢量的幅值都相等, 磁链轨迹就是 足够小时, 电压空间矢量的轨迹就近似圆形的正多边形, 即形成 “圆形磁场” 一个正多边形, 。
SVPWM地原理及法则推导和控制算法详解
SVPWM地原理及法则推导和控制算法详解空间矢量调制(Space Vector Pulse Width Modulation,SVPWM)是一种高性能的PWM调制技术,广泛应用于三相逆变器等电力电子设备中。
SVPWM通过精确控制逆变器开关器件的导通和截止时刻,实现对输出电压波形的优化调制,从而提高系统的输出品质和效率。
SVPWM的基本原理是将三相电压向量合成成一个等效的矢量,通过调节这个等效矢量的长度和角度来控制逆变器输出电压的大小和相位。
SVPWM利用三个交错的相电压矢量的和矢量作为输出矢量,通过适当的控制合成相电压矢量的导通时间,实现对输出电压的控制。
1.根据输入的参考电压和当前电网电压,计算出需要合成的输出电压的长度和角度。
2.根据输出电压的长度,将其分解成负序和零序分量。
3.决定3个相电压矢量的开关状态和切换时刻,以使得输出电压尽量接近目标值。
4.计算出每个相电压矢量的开关时间,确定导通和截止时刻。
5.控制逆变器开关器件的导通和截止时刻,实现对输出电压的调制。
1.输入参考电压和当前电网电压。
2.根据参考电压和电网电压的差异,计算出需要合成的输出电压的长度和角度。
3.根据输出电压的长度,将其分解成负序和零序分量。
4. 计算出每个相电压矢量的Duty Cycle(占空比),确定导通和截止时刻。
5.控制逆变器开关器件的导通和截止时刻,实现对输出电压的调制。
在SVPWM的控制中,有两个主要的参数需要确定,即调制指数和调制比率。
调制指数决定了输出电压的波形形状,调制比率决定了输出电压的幅值。
1.输出电压的平均值更接近于参考电压,电压调制度更高。
2.逆变器输出电压的谐波含量更低,输出电压波形更接近理想的正弦波。
3.控制精度更高,能够实现更精确的输出电压调节。
总之,SVPWM是一种高性能的PWM调制技术,通过精确控制逆变器开关器件的导通和截止时刻,实现对输出电压波形的优化调制。
SVPWM的原理和控制算法在电力电子设备中具有广泛的应用前景。
SVPWM的原理及法则推导和控制算法详解
1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc,逆变器输出的三相相电压为UA 、UB 、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA t 、UB t 、UC t ,它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U 2-27 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U t 就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= 2-28可见 U t 是一个旋转的空间矢量,它的幅值为相电压峰值的倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U t 为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
电压空间矢量脉宽调制技术(SVPWM)的研究及其实现
电压空间矢量脉宽调制技术(SVPWM )的研究及其实现-------By maxthonzwq 2011年2月20日星期日 (1) 获得U α,U β:给定U d ,U q 经过PARK 变换得到U α,U β:cos sin sin cos d q U U U U αβϕϕϕϕ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥−⎣⎦⎣⎦⎣⎦(2) 扇区确定:.① 先计算三个中间变量B 0,B 1,B 2:012sin 60sin 30sin 60sin 30B U B U U B U Uβαβαβ⎧=⎪=−⎨⎪=−−⎩o oo o 在使用符号函数1()0x sign x x >⎧=⎨<⎩计算扇区中间变量P 值: 2104si ()2()()P gn B sign B sign B =++P 值与扇区号之间的对应关系为:P 1 2 3 4 5 6 扇区号 2 6 1 4 3 5(3) 计算电压矢量作用时间t1,t2: 扇区1:120PWMU t T U t αβ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦ 扇区:2:12PWMU t T U t αβ⎡⎢⎡⎤⎡⎤⎢=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦ 扇区3:120PWMU t T U t αβ⎡⎤⎡⎤⎡⎤⎢=⎢⎥⎢⎥⎢⎣⎦⎣⎦⎢⎣ 扇区4:120PWMU t T U t αβ⎡⎤⎡⎤⎡⎤⎢=⎢⎥⎢⎥⎢⎣⎦⎣⎦⎢⎣ 扇区5:12PWMU t T U t αβ⎡⎢⎡⎤⎡⎤⎢=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦ 扇区6:120PWMU t T U t αβ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦同时满足120PWM T t t t =++,t 0为零矢量作用的时间,t 1,t 2分别是两个相邻电压矢量的导通时间。
如果t1+t2>T PWM,则11122212PWMPWMt Ttt tt Ttt t⎧=⎪+⎪⎨⎪=⎪+⎩;如果t1+t2<T PWM,则t1,t2保持不变。
(4) 利用t1,t2计算切换点T cm1,T cm2,Tcm3: 先计算中间变量Ta ,Tb ,Tc :1212()/4/2/2a PWM b a c b T T t t T T t T T t =−−⎧⎪=+⎨⎪=+⎩,则不同扇区内切换点T cm1,T cm2,T cm3可有下表得到: 扇区号 1 2 3 4 5 6 T cm1 T b T a T a TbT c Tc T cm2 T a T b T c T c T b T a T cm3T cT cT bT aT aT bT cm1,T cm2,T cm3是DSP 控制器中比较寄存器的值,通过与定时器计数寄存器的值进行比较来产生PWM 波, 这里采用的7段式电压空间矢量PWM 波形输出,还有5段式电压空间矢量PWM 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采用空间矢量脉宽调制(SVPWM )的开环VVVF 调速系统的综合实训一、实验目的1、理解电压空间矢量脉宽调制(SVPWM )控制的基本原理。
2、熟悉MCKV 电机控制系统的CPU 模块、IPM 模块和机组各部分硬件模块,并确认工作正常。
3、了解SVPWM 变频器运行参数和特性。
二、实验内容:1、熟悉CCS 编程环境,并在CCS 下编译、下载、运行DSP 软件工程。
2、观察并记录定子磁链周期和频率,并分析他们之间的关系。
3、观测并记录启动时电机定子电流和电机速度波形)(t f i v =与)(t f n =;三、实验预习要求1、阅读并掌握三相交流异步电机VVVF 调速系统工作原理。
2、了解电压空间矢量脉宽调制(SVPWM )控制的基本原理。
3、阅读本次实验指导书和实验程序,写好实验预习报告。
4、在MATLAB/Simulinlk 环境中搭好仿真模型,结合本程序LEVEL1功能框图,完成电流速度双闭环系统交流异步电机矢量控制仿真。
四、实验原理当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转矢量(磁链圆)。
SVPWM 就是着眼于使形成的磁链轨迹跟踪由理想三相平衡正弦波电压源供电时所形成的基准磁链圆,使逆变电路能向交流电动机提供可变频电源,实现交流电动机的变频调速。
现在以实验系统中用的电压源型逆变器为例说明SVPWM 的工作原理。
三相逆变器由直流电源和6个开关元件( MOSFET) 组成。
图1是电压源型逆变器的示意图。
图1 电压源型逆变器示意图对于每个桥臂而言,它的上下开关元件不能同时打开,否则会因短路而烧毁元器件。
其中A 、B 、C 代表3 个桥臂的开关状态,当上桥臂开关元件为开而下桥臂开关元件为关时定义其状态为1 ,当下桥臂开关元件为开而上桥臂开关元件为关时定义其状态为0。
这样A 、B 、C 有000 、001 、010 、011 、100 、101 、110 、111共 8种状态。
逆变器每种开关状态对应不同的电压矢量,根据相位角不同分别命名为U 0(000)、U 1(100)、U 2(110)、U 3(010)、U 4(011)、U 5(001)、U 6(101)、U 7(111)如图2所示。
图2 基本电压空间矢量其中U 0(000)和U 7(111)称为零矢量,位于坐标的原点,其他的称为非零矢量,它们幅值相等,相邻的矢量之间相隔60°。
如果按照一定顺序选择这六个非零矢量的电压空间矢量进行输出,会形成正六边形的定子磁链,距离要求的圆形磁链还有很大差距,只有选择更多的非零矢量才会使磁链更接近圆形。
SVPWM 的关键在于用8个基本电压空间矢量的不同时间组合来逼近所给定的参考空间电压矢量。
在图3中对于给定的输出电压U ,用它所在扇区的一对相邻基本电压x U 和60 x U 来等效。
此外当逆变器单独输出零矢量时,电动机的定子磁链矢量是不动的。
根据这个特点,可以在载波周期内插入零矢量,调整角频率,从而达到变频目的。
图3 电压空间的线性组合根据正弦定理可以得到:⎪⎪⎩⎪⎪⎨⎧==-+0602001120sin sin 120sin )60sin(U U T T U U T T x PWMx PWM θθ又有U U T T U T T x PWM x PWM =++6021 得到⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧--==-=+21060201sin 3)60sin(3t t T T T U U T T U U T PWM PWM x PWM x θθ 式中PWM T 为载波周期;UU 的幅值可以由f U 曲线确定;x U 和60+x U 的幅值相同且恒为直流母线电压32V ;θ可以由输出正弦电压角频率w 和PWM nT 的乘积确定。
因此,当已知两相邻的基本电压空间矢量x U 和60+x U 后,就可以根据上式确定1T 、2T 、0T 。
五、实验流程图图1-1-1给出了实验程序功能框图:图1-1-1 实验一功能框图以下给出实验一中的控制参数及其调节范围EnableFlag : 0、1 启动控制位SpeedRef : -0.9~0.9 速度给定值六、实验设备1、DSPCPU组合板:Techv-28335+MCKV-INF2+MCKV-INF32、DSP仿真器及usb线3、MCKV DSP电机控制器4、三相交流异步电机机组5、PC机及电源电缆七、实验步骤在做该实验之前,请确保已经按照系统测试步骤和方法进行各步骤的运行,该实验具体调试操作步骤如下:1.将头文件“build.h”中的编译指令BUILDLEVEL设为“LEVEL1”,然后用“Project--Build”命令重新编译连接程序。
在“build.h”文件中第29行:#define BUILDLEVEL LEVEL1-------修改此处。
2.用“File--Load Program”菜单命令加载“ACI_2833X.out”文件到目标板,此时注意观察加载的文件“ACI_2833X.out”是否您刚才编译链接生成的文件,看一下文件的生成时间就知道了,如果所有源文件都没有修改,此时“ACI_2833X.out”的生成时间不会变化;如果想证实源文件编译是否执行,可以在主程序中随便修改一点注释内容,那么编译的时候就肯定会生成新时间的输出文件。
3.点击“Debug--Real time Mode”选择实时模式,此时出现一个对话框,选择“是(Y)”,再点击“Debug--Run”或者点击左侧运行图标运行程序,此时程序在实时运行模式下运行。
4.在“Watch window”窗口中左键点击“Build1”标签并在空白处点击右键,选择连续刷新模式“Continuous Refresh”,此时应能观察到“BackTicker”变量在不断变化,说明主程序已经运行,5.在控制器面板上进行电机选择,选择三相交流异步电机显示“正确”后,在主菜单下按两次向下键并确认后进入状态页面,打开主电源(按钮:电源)。
因为主电路中有3300uf的大电容,所以需要较长的充电时间,为了避免过大的充电电流,主电路中有NTC负温度系数的热敏电阻,所以一定要等控制器的液晶上显示“电源:开启”,才能进行下一步的操作,并且每次打开主电源距离上次关闭主电源需要有5分钟以上的间隔时间。
6.在“Watch window”窗口中双击变量“EnableFlag”右侧的“Value“值并修改为1后回车,此时应能观察到变量“IsrTicker”也在不断变化,说明主中断服务程序已经正常运行。
而此时电机应该转动,并稳定在740转/分左右的速度上,说明控制系统PWM输出部分和IPM逆变部分硬件以及机组和连线都是正确的,如果电机不转,请检查INF2电路板上的LED2指示灯是否熄灭,如果熄灭说明产生了功率保护中断,可以更换DSPCPU板测试,也可更换机组测试,如果现象依旧则需要返修。
如果电机运转了,但是控制器上没有速度显示,请检查DSPCPU电路板下面那块INF2电路板上的JP1拨码开关是否拨向左边。
7.分别右键点击图形显示窗口“Channel1&2”、“Channel3&4”,选择连续刷新模式“Continuous Refresh”,观察rg1.Out、Ta、Tb以及Tc 的波形,如图1-1-3和图1-1-4所示。
rg1.Out是给定磁链斜坡函数的输出,它是以360度为PU基值的Q15格式数据表示的,将竖线光标移至第一个图形的零点处,注意观察图形窗口“Channel1&2”左下角的第一个坐标值的第一个值是时间,单位为ms,我们可以看到给定的磁链周期为40ms,这样可以计算出给定磁链的频率为25Hz,这和我们设定的SpeedRef=0.5是对应的,设定为1时,对应频率为50Hz,周期应为20ms。
Ta、Tb、Tc表示的是三组PWM控制信号在每个调制周期中的占空比,也是Q15格式的数据。
将光标移至Channel2的第一个马鞍波的波峰中点,读出时间坐标为14.8ms,将光标移至Channel3的第一个马鞍波的波峰中点,读出时间坐标为28.2ms,那么得出结论:Ta相位超前Tb=(28.2-14.8)/40*360=120度。
如图1-1-5和图1-1-6所示。
设定speedref为不同值,完成表1-1-1。
8.改变SpeedRef的值,观察波形的周期值是否和设定值对应。
同时VdTesting、VqTesting的值也跟着变化,此时可以观测图形显示窗口波形幅值的变化。
变量VdTesting、VqTesting相当于IPARK逆变换的输入值,在程序中做了一个函数,随着SpeedRef的值变化而变化,所以不能修改。
根据speedref的值完成表1-1-2。
9.分别右键点击图形显示窗口“Channel1&2”、“Channel3&4”,取消连续刷新模式“Continuous Refresh”,点击“Debug--Halt”,再点击“Debug--Real time Mode”,最后点击“Debug--Reset CPU”,“Debug—Restart ”,退出实时运行模式,并停止程序运行。
10.如果继续实验,请转实验二。
否则请关闭控制器的功率部分主电源(按下电源键),然后关闭CCS软件退出程序,关闭控制电源。
图1-1-3 rg1.out和Ta波形图1-1-4 Tb和Tc波形图1-1-5 rg1.out和Ta波形图1-1-6 Tb和Tc波形实验报告:1、分析实验结果,并根据表1-1-1的测试结果,解释电机速度设定参考值和电机实际运行速度之间的差异是怎么产生的。
2、阅读实验程序,理解IPARK和SVPWM软件模块的工作原理。
绘制出IPARK和SVPWM模块的详细软件流程图。
3、读懂LEVEL1实验程序,并给出LEVEL1程序流程图。
4、总结实验经验,回答本实验中提出的问题,并整理实验报告。
附录:/*==================================================================== =================File name: IPARK.C (IQ version)Originator: Digital Control Systems GroupTexas InstrumentsDsscription: Inverse Park Transformation====================================================================== ===============History:-------------------------------------------------------------------------------------04-15-2005 Version 3.20-------------------------------------------------------------------------------------*/#include "IQmathLib.h" // Include header for IQmath library// Don't forget to set a proper GLOBAL_Q in "IQmathLib.h" file#include "dmctype.h"#include "ipark.h"void ipark_calc(IPARK *v){_iq Cosine,Sine;// Using look-up IQ sine tableSine = _IQsinPU(v->Angle);Cosine = _IQcosPU(v->Angle);v->Alpha = _IQmpy(v->Ds,Cosine) - _IQmpy(v->Qs,Sine);v->Beta = _IQmpy(v->Qs,Cosine) + _IQmpy(v->Ds,Sine);}/*==================================================================== =================File name: SVGEN_DQ.C (IQ version)Originator: Digital Control Systems GroupTexas InstrumentsDescription: Space-vector PWM generation based on d-q components====================================================================== ===============History:-------------------------------------------------------------------------------------04-15-2005 Version 3.20-------------------------------------------------------------------------------------*/#include "IQmathLib.h" // Include header for IQmath library// Don't forget to set a proper GLOBAL_Q in "IQmathLib.h" file#include "dmctype.h"#include "svgen_dq.h"float f_t1,f_t2;void svgendq_calc(SVGENDQ *v){_iq Va,Vb,Vc,t1,t2;Uint32 Sector = 0; // Sector is treated as Q0 - independently with global Q// Inverse clarke transformationV a = v->Ubeta;Vb = _IQmpy(_IQ(-0.5),v->Ubeta) + _IQmpy(_IQ(0.8660254),v->Ualpha); // 0.8660254 = sqrt(3)/2Vc = _IQmpy(_IQ(-0.5),v->Ubeta) - _IQmpy(_IQ(0.8660254),v->Ualpha); // 0.8660254 = sqrt(3)/2// 60 degree Sector determinationif (Va>_IQ(0))Sector = 1;if (Vb>_IQ(0))Sector = Sector + 2;if (Vc>_IQ(0))Sector = Sector + 4;// X,Y,Z (Va,Vb,Vc) calculationsV a = v->Ubeta; // X = VaVb = _IQmpy(_IQ(0.5),v->Ubeta) + _IQmpy(_IQ(0.8660254),v->Ualpha); // Y = VbVc = _IQmpy(_IQ(0.5),v->Ubeta) - _IQmpy(_IQ(0.8660254),v->Ualpha); // Z = Vcif (Sector==0) // Sector 0: this is special case for (Ualpha,Ubeta) = (0,0){v->Ta = _IQ(0.5);v->Tb = _IQ(0.5);v->Tc = _IQ(0.5);}if (Sector==1) // Sector 1: t1=Z and t2=Y (abc ---> Tb,Ta,Tc){t1 = Vc;t2 = Vb;v->Tb = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // tbon = (1-t1-t2)/2v->Ta = v->Tb+t1; // taon = tbon+t1v->Tc = v->Ta+t2; // tcon = taon+t2 }else if (Sector==2) // Sector 2: t1=Y and t2=-X (abc ---> Ta,Tc,Tb){t1 = Vb;t2 = -Va;v->Ta = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // taon = (1-t1-t2)/2v->Tc = v->Ta+t1; // tcon = taon+t1v->Tb = v->Tc+t2; // tbon = tcon+t2 }else if (Sector==3) // Sector 3: t1=-Z and t2=X (abc ---> Ta,Tb,Tc){t1 = -Vc;t2 = Va;v->Ta = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // taon = (1-t1-t2)/2v->Tb = v->Ta+t1; // tbon = taon+t1v->Tc = v->Tb+t2; // tcon = tbon+t2 }else if (Sector==4) // Sector 4: t1=-X and t2=Z (abc ---> Tc,Tb,Ta){t1 = -Va;t2 = Vc;v->Tc = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // tcon = (1-t1-t2)/2v->Tb = v->Tc+t1; // tbon = tcon+t1v->Ta = v->Tb+t2; // taon = tbon+t2 }else if (Sector==5) // Sector 5: t1=X and t2=-Y (abc ---> Tb,Tc,Ta){t1 = Va;t2 = -Vb;v->Tb = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // tbon = (1-t1-t2)/2v->Tc = v->Tb+t1; // tcon = tbon+t1v->Ta = v->Tc+t2; // taon = tcon+t2 }else if (Sector==6) // Sector 6: t1=-Y and t2=-Z (abc ---> Tc,Ta,Tb){t1 = -Vb;t2 = -Vc;v->Tc = _IQmpy(_IQ(0.5),(_IQ(1)-t1-t2)); // tcon = (1-t1-t2)/2v->Ta = v->Tc+t1; // taon = tcon+t1v->Tb = v->Ta+t2; // tbon = taon+t2 }// Convert the unsigned GLOBAL_Q format (ranged (0,1)) -> signed GLOBAL_Q format (ranged(-1,1))// v->Ta = _IQmpy(_IQ(2.0),(v->Ta-_IQ(0.5))); // v->Tb = _IQmpy(_IQ(2.0),(v->Tb-_IQ(0.5))); // v->Tc = _IQmpy(_IQ(2.0),(v->Tc-_IQ(0.5)));}。