卫星和飞船的跟踪测控分析
2020年高考物理热点分析——“神州”七号载人飞船成功发射
2020年高考物理热点分析——“神州”七号载人飞船成功发射〝神州〞七号载人飞船成功发射一、背景材料2008年9月25日至28日,我国成功实施了〝神州〞七号载人航天飞行.这是继2005年10月12日神舟六号载人飞船成功发射之后,人类探究太空历史上的又一次重要成就。
承担此次飞行任务的航天员分不是翟志刚、刘伯明和景海鹏。
9月25日21时09分,火箭点火起飞,583秒后,飞船与火箭分离,准确入轨,21时,载人航天工程总指挥常万全宣布,神舟七号飞船发射成功.飞船在近地点200公里到远地点347公里的椭圆轨道上运行,飞船在椭圆轨道飞行第1至5圈,由于大气阻力的阻碍,每圈轨道降低近1公里,飞船远地点高度从347公里降为343公里,第5圈,飞船远地点点火变轨,抬升近地点,轨道由椭圆轨道变成高度343公里圆轨道。
在高度343公里圆轨道下飞船运行周期约为90分.26日4时04分,〝神州〞七号船成功变轨,由椭圆轨道变成近圆轨道.26日16时9分,在刘伯明、景海鹏的协助和配合下,中国神舟七号载人飞船航天员翟志刚顺利出舱,实施中国首次空间出舱活动.神舟七号飞船飞行到第31圈时,成功开释伴飞小卫星,这是中国首次在航天器上开展微小卫星相伴飞行试验.的圆轨道绕地球飞行直至返回。
9月28日12时51分,神舟七号返回舱舱门关闭,神七返回时期开始,17时36分,神舟七号返回舱顺利着陆,神舟七号载人航天任务胜利完成.中国第三次载人航天飞行的圆满成功,再一次证明以我国科技人员所具备的强大创新能力,作为当代青年一代也必将激发起爱国热情,为实现中华民族的伟大复兴,为我国科学的进展努力作出更大的奉献.二、考点链接神州七号载人飞船的成功发射,标志着我们在探究太空的伟大征程中取得了重大进展。
这是我国高科技进展新的伟大里程碑,是我国改革开放和社会主义现代化建设的又一骄人成就.神七的发射和运行与物理学的力、热、电、光、原知识有较大的联系,专门是与万有引力定律和匀速圆周运动知识紧密相联,〝神七〞将成为2018年高考命题的最大热点,高三复习和高考备考中要引起足够的重视.三、例题分析例1.2008年9月25日至28日,我国在酒泉卫星发射中心成功发射了〝神州七号〞载人航天宇宙飞船,。
一体化测控技术,商业航天测控的未来

《卫星与网络》2020年08月042一体化测控技术,商业航天测控的未来1957年10月4日,随着世界上第一颗人造地球卫星从苏联的拜科努尔发射场发射升空,进入近地轨道,一个崭新的行业——航天测控,开始步入人们的视线。
经过六十多年的发展,航天测控体系已经逐渐成熟,成为各大航天强国必备的部门;而航天测控在技术上的成熟和测控设备价格的逐步降低,使商业化运营的测控公司逐渐出现并迅速发展起来。
为什么需要航天测控:风筝没有线飞不高航天测控英文为Telemetry, Tracing andControl, 缩写为TT&C,是为保证航天器在轨道上正常运行,地面与航天器进行遥测(Telemetry)、遥控(Telecommand)、跟踪(Tracing)和通信的技术。
那么,为什么火箭及航天器必须进行测控呢?有以下这些原因:●火箭发射的飞行面临极大的风险,必须对火箭的速度、方向、飞行姿态、轨道,各种系统的工作状态等进行实时监测,并由火箭的飞行控制系统进行调整。
●航天器进入轨道的精度如果不高,甚至偏离轨道,需要进行实时监测,启动航天器上+魏兴043Satellite & Network的发动机进行调整。
●航天器工作的宇宙空间环境极为恶劣:在真空中飞行,受太阳照射的一面温度可以高达100摄氏度以上,而背阴面,温度则可能低至零下100摄氏度到零下200摄氏度;太空环境中充斥着各种致命的宇宙射线、电磁波辐射和空间碎片。
航天器长年累月在这种环境下工作,出故障的概率很大,必须有测控系统对它们的状态进行跟踪,并控制航天器进行姿态等各种调整。
●航天器受外部环境的影响,其飞行轨道可能会发生改变。
比如与陨石和太空垃圾相撞。
更常见的是,在低地球轨道(LEO)上飞行的航天器,仍然会受到极其稀薄的大气层影响,受到空气分子的阻碍后,飞行速度会逐渐减慢。
如果速度低于第一宇宙速度,那么航天器就会被地球引力吸引回地面,在大气层中烧毁。
第四章 跟踪与数据中继卫星系统——概述

TDRSS改进了统一载波系统中用频分复用来统一完成各种 测控功能的方案,而采用时分复用和扩频复用来实现多 种测控功能和数传功能的统一。 这种“时分/扩频”统一的原理,包括6个主要的技术要 素: ① 时分复用。 ② 一码多用。 ③ I/Q正交复用。 ④ 纠错编、译码。 ⑤ 高速数传技术。 ⑥ 扩频测距。
覆盖率=2(α+β)/2π
③中继卫星到地心的连线既不垂直于用户星轨道平面, 也不平行于用户星轨道平面,覆盖率介于两者之间,用 户星一个轨道周期内既可能出现地球遮挡,也可能完全 覆盖。
TDRSS的特点表现在,它既与同步卫星通信不同,又与“TT&R” 不同。它与同步卫星的区别: ①TDRSS要对用户星定轨。 ② TDRSS测控目标为高速空间飞行器;而卫星通信的用户为 地球表面的卫星通信固定站或速度较低的移动通信站。 ③ TDRSS要进行高速数据中继传输。 ④ TDRSS能进行多目标测控通信。其多址通信的方法,包括 码分多址和时分多址,并采用了TDRS星载相控阵天线及其多 波束地面形成等新技术。
②中继卫星位于用户星轨道平面时,中继 卫星跟踪用户星,覆盖用户星是最差的。 图中,弧ABCD的长度是用户星的可见弧段, 也就是中继卫星对用户星的覆盖弧段。
Re Re 2 α +β =2 arccos +arccos Hs+Re Rs
地 面 终 端 站
中 KSA正向(S频) 继 卫 遥控、跟踪 星 KSA反向(K频)
遥测、跟踪
电气
TDRSS发射运载器
结束
在TDRSS中,对用户航天器的定轨,采
RR 2
用的方法是:“动力学”法。( R R 法) 利用地面终端站→中继卫星→用户航天器→中继卫星 →地面终端站的双向测距测速数据来定轨,电波的传 播顺序为t 0 →t 1 → t 2 → t 3 →t 4
卫星在轨测控管理规程

卫星在轨测控管理规程卫星在轨测控管理规程是指用于指导和规范卫星在轨测控工作的一系列规定和措施。
这些规程旨在确保卫星能够稳定地运行并完成预定任务,同时最大程度地延长卫星的使用寿命。
第一章:引言在引言部分,我们将简要介绍卫星在轨测控管理规程的背景和目的。
卫星在轨测控工作是确保卫星正常运行的关键环节,对于保障卫星的稳定性和可靠性具有重要意义。
第二章:卫星在轨测控任务本章将详细介绍卫星在轨测控任务的内容和要求。
其中包括卫星的定位与测量、姿态控制、数据采集与传输等方面的任务。
同时,还将阐述各项任务的目标和指标,以及实施过程中可能遇到的问题和应对措施。
第三章:卫星在轨测控管理组织卫星在轨测控管理组织是卫星在轨测控管理工作的核心。
本章将介绍卫星在轨测控管理组织的设置和职责,包括测控中心、测控站等相关部门和人员的职责和配备要求。
同时,还将说明各级组织之间的协调与合作关系,以及管理组织的运行机制和管理流程。
第四章:卫星在轨测控设备本章将详细介绍卫星在轨测控所需的设备及其要求。
包括测控设备的选型、采购和维护等方面的内容。
同时,还将说明设备的使用规范和安全措施,以及设备故障的处理和维修流程。
第五章:卫星在轨测控数据管理卫星在轨测控数据的管理是卫星在轨测控工作的重要组成部分。
本章将介绍卫星在轨测控数据的获取、传输、存储和分析等方面的内容。
同时,还将说明数据管理的要求和措施,以及数据的保密和备份策略。
第六章:卫星在轨测控风险管理卫星在轨测控工作面临着各种风险和挑战,对风险进行有效管理是确保卫星正常运行的关键。
本章将介绍卫星在轨测控风险管理的原则和方法,包括风险识别、评估、控制和应急响应等方面的内容。
第七章:卫星在轨测控质量管理卫星在轨测控质量管理是保障卫星在轨运行的重要保证。
本章将介绍卫星在轨测控质量管理的要求和措施,包括质量控制、质量评估和质量改进等方面的内容。
同时,还将说明质量管理的流程和相关的质量标准和规范。
第八章:卫星在轨测控安全管理卫星在轨测控安全管理是确保卫星在轨运行安全的重要环节。
中国航天测控网

S信息 进行定轨计算 。 0 3 1 月 20 年 0 航天 测控 网是 指对航 天 器进 行测 量 星 ,一般运行在地球同步轨道 ,由于轨道 载 GP 5日至 1 6日成功 完成了我国首 次载人航 控 制 的专用 网络 ,其 主要任 务 是对上 升 高 , 3 0 0 约 6 0 千米 , 故它看的范围很广 , 一 1 段 运载 器进 行测 量 ,对故 障火箭 实施 安 颗卫星可以看半个地球 ,即一颗中继卫星 天飞 行的测控任务 ,使我国成 为继苏 联 、
-
N控系统 , 提高 了发射国外卫星的测控
火星 , 在飞出太阳系 , 人类对宇宙的观测范 域和 海域 ,结束后 返回大本营 。由于是设 能 力 。 19 年 , 9 9 我国研制成功 S 频段统 一测 围已达到 1 0亿光年以外。 5 在地球上 ,所 以地基测控站 ( )在观测 船
次载人登月。 到目前为止 , 数千颗科学实验 网。地基测控网包括陆上固定测 控站 、陆 波多站测 量系统。 19 年 , 2 我国研制成功 国际C频段统 9 卫星和应 用卫星在太空中为居住在地球上 上活动站 、海上测控船 ,活动站和测控船
的人类服务 , 各种宇宙探测器在飞向金星 、 可以根据不同的航天飞 行任务布在不 同地
全控制 ;对航 天器 轨道 和姿 态进 行测 量 的测控覆盖率高达 5 %左右 , 0 就好像 是将 美 国之 后第 三个 独立 进行载 人航 天的 国 0 5年 1 0月 1 2日至 1 7日,在神舟 和控 制 , 航天器遥测 进行 接收处理 , 对 对 个地面测控站搬到 了天上 ,让它居 高临 家。2 0 六号飞船上成功进行了使用船载海事终端 航 天器进行遥 控 ,接收 载人航天器 图像 , 下地跟踪 、测量 、监视和控制运行在眼皮
我国载人航天器测控与通信技术发展
㊀V o l .31㊀N o .6㊀166㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀航㊀天㊀器㊀工㊀程S P A C E C R A F TE N G I N E E R I N G ㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第31卷㊀第6期㊀2022年12月我国载人航天器测控与通信技术发展陈晓光㊀易予生㊀丁凯(北京空间飞行器总体设计部,北京㊀100094)摘㊀要㊀梳理了我国神舟载人飞船㊁天舟货运飞船和空间站的测控与通信技术设计状态和发展历程,提出了我国载人航天器测控与通信系统逐步小型化㊁集成化㊁通用化㊁高性能的发展趋势.结合未来载人航天新阶段测控与通信技术的需求,给出了未来载人航天器测控与通信可重构㊁智能化㊁批产化㊁一体化发展的重点方向和关键技术.关键词㊀载人航天器;空间站;地基测控;天基测控;出舱通信中图分类号:V 448㊀㊀文献标志码:A ㊀㊀D O I :10 3969/ji s s n 1673G8748 2022 06 020D e v e l o p m e n t o fT T &CC o m m u n i c a t i o n sT e c h n o l o g yf o rC h i n aM a n n e dS pa c e c r a f t C H E N X i a o g u a n g ㊀Y IY u s h e n g㊀D I N G K a i (B e i j i n g I n s t i t u t e o f S p a c e c r a f t S y s t e m E n g i n e e r i n g ,B e i j i n g 100094,C h i n a )A b s t r a c t :T h e d e s i g n s t a t u s a n dd e v e l o p m e n t o fC h i n a sS h e n z h o um a n n e ds pa c e c r a f t ,T i a n z h o u c a r g o s p a c e c r a f t a n ds p a c es t a t i o n T T&C (t e l e m e t r y ,t r a c k i n g an dc o mm a n d )c o mm u n i c a t i o n s t e c h n o l o g y a r es u r v e y e d .T h ed e v e l o p m e n t t r e n do fm a n n e ds pa c e c r a f tT T&Cc o mm u n i c a t i o n s s y s t e m ,w h i c hi s g r a d u a l l y m i n i a t u r i z e d ,i n t e g r a t e d ,u n i v e r s a la n dh i g h Gp e r f o r m a n c ei si n t r o Gd u c e d .C o mb i n e dw i t h t h e r e q u i r e m e n t s o fT T &Cc o m m u n i c a t i o n s t e c h n o l o g y i n t h e n e ws t a ge of f u Gt u r em a n n e d s p a c e ,t h e k e y d i r e c t i o n s a n d t e c h n o l og i e s f o r th e r e c o n fi g u r a b l e ,i n t e l l i g e n t ,b a t c h p r o d u c Gt i o n a n d i n t e g r a t e d d e v e l o p m e n t o f f u t u r em a n n e d s pa c e c r a f tT T &Cc o m m u n i c a t i o n a r e g i v e n .K e y w o r d s :m a n n e ds p a c e c r a f t ;s p a c es t a t i o n ;g r o u n d Gb a s e d T T&C ;s p ac e Gb a s ed T T&C ;E V A c o mm u n i c a t i o n s收稿日期:2022G10G08;修回日期:2022G12G10基金项目:中国载人航天工程作者简介:陈晓光,男,硕士,研究员,研究方向为载人航天器系统设计和测控通信.E m a i l :s u n r i s e 77@s i n a .c o m .㊀㊀载人航天器测控与通信技术包括测控技术及数据传输技术两部分.载人航天器入轨后,由器上测控与通信分系统和地面站系统㊁中继卫星系统一起,共同建立器地无线测控㊁测量及对地数据传输㊁中继数据传输通信链路,完成对载人航天器状态采集㊁轨道测量㊁运行控制㊁载荷数据下传地面等功能.载人航天器测控与通信系统是航天器在轨与地面沟通和数据传输通信的重要生命线,为载人航天器在轨正常工作提供各项信道保障条件[1G2].㊀㊀近年来,随着微电子㊁软件无线电等技术的发展,涌现了大量应用于测控与通信领域的新技术㊁新产品㊁新思路,呈现出一些新变化㊁新趋势[3G5].本文在梳理和总结我国载人飞船㊁货运飞船㊁空间站测控与通信技术发展现状的基础上,结合测控与通信技术的发展历程,总结提炼了载人航天器测控㊁导航㊁数传㊁星间等方面的发展趋势.最后,归纳并给出了未来载人航天器对测控与通信技术的需求,以及测控与通信技术未来发展的重点方向和关键技术.1㊀测控与通信技术发展现状载人航天测控与通信的主要任务是在天基中继卫星㊁导航星座㊁陆基测控站和海基测控船支持下,完成载人航天器(载人飞船㊁货运飞船㊁空间站)的跟踪测轨㊁遥测遥控㊁中继通信㊁高速数传㊁图像通信㊁话音通信㊁交会对接通信㊁出舱活动通信等功能,见图1.图1㊀载人航天器测控与通信系统F i g 1㊀M a n n e d s p a c e c r a f tT T&Cc o mm u n i c a t i o n s s ys t e m ㊀㊀由图1可知:通过对地测控与通信链路,实现天地遥测㊁遥控㊁话音数据的上下行传输;通过中继链路,实现天基遥测和指令数据㊁图像㊁话音㊁试验数据㊁延时数据㊁平台状态信息的传输;通过我国北761㊀㊀第6期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀陈晓光等:我国载人航天器测控与通信技术发展斗(B D)星座,实现定位和测速;通过遥控指令系统,完成整器指令分发与执行;通过空空通信链路,实现目标飞行器㊁追踪飞行器之间的指令㊁遥测㊁定位数据及遥操作图像数据的传输;通过出舱通信链路及舱内外无线通信链路,实现航天员与空间站之间的话音及遥测数据传输.1 1㊀地基测控系统载人航天器地基测控系统主要采用统一S频段测控体制.如图2所示,统一S频段测控集跟踪㊁测距㊁测速㊁遥测㊁遥控等功能于一体,设备简单,可靠性高,测量精度适中,已在我国载人航天器中得到广泛应用.(1)载波调制体制.统一S频段测控采用频分复用调制体制,每个基带信号先调制到自身的副载波上,几个已调副载波合并之后,再对主载波进行角度调制.一般来说,地(海)面站上/下行载波都采用调相体制(P M/P M),航天器上的测控与通信设备采用相参工作体制;或者,地面站采用上行载波调频,下行载波调相体制(F M/P M),航天器上的测控与通信设备采用非相参体制.(2)测距㊁测速体制.纯侧音测距体制或伪随机码(P N码)测距体制,或音码混合体制.采用侧音测距时,最高侧音用来保精度,低侧音用来解距离模糊.测速采用连续播双程相干多普勒测速技术,载波同步后从载波或伪码中提取出多普勒频移进行测速.(3)遥控遥测体制.对上行遥控副载波进行脉冲编码(P C M)/相移键控(P S K)调制,或P C M/多频移键控(M F S K)调制,或P C M/幅移键控(A S K)调制等.编码遥测采用对下行遥测副载波进行P C M/ P S K调制,或P C M/差分相移键控(D P S K)调制.话音㊁数据㊁图像对通信副载波进行P S K或D P S K 调制.图2㊀载人航天器统一S频段测控系统F i g 2㊀U S BT T&Cs y s t e mo fm a n n e d s p a c e c r a f t1 2㊀天基测控系统中继卫星系统作为天基测控通信网,能够有效扩大中㊁低轨道飞行器测控㊁通信覆盖范围;中继终端设备利用我国第2代数据中继卫星系统支持,完成天地双向高速数据传输[6].中继天线终端主要实现功能包括:捕获并跟踪中继卫星信标信号;在中继卫星的可视弧段通过中继信道向地面传输数据;在中继卫星的可视弧段通过中继信道接收地面上行数据;完成规定的前向和返向信道数据处理;进行伪码测距[7G8].天链中继卫星系统利用地球同步轨道上的2~3颗中继卫星实现对载人航天器的跟踪㊁测控㊁通信甚至导航[9],如图3所示.体制上采用扩频测控体制,同时还有高数据率数传体制.采用P C M㊁偏移四相相移键控(O Q P S K)及P C M㊁码分多址(C D M A)㊁二相相移键控(B P S K)数据传输体制,跟踪导航统一采用单通道单脉冲测角㊁伪码测距的单站定轨体制,并利用星本体测控数据提高用户的跟踪导航精度,采用I,Q双通道调制,I路传送短P N码,Q路传送长P N码,短码引导长码捕获来解决无模糊测距和快速捕获问题.861㊀航㊀天㊀器㊀工㊀程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀31卷㊀图3㊀载人航天器天基测控系统F i g 3㊀S p a c eGb a s e dT T&Cs y s t e mo fm a n n e d s p a c e c r a f t ㊀㊀2008年9月,神舟七号载人飞船首次使用天链一号01星进行天基测控和跟踪,传回的视频图像清晰,话音质量好,数据可靠,成功实现了我国天基信息传输的重大突破;2011年10月,天链一号01星和02星形成的双星系统,圆满完成神舟八号飞船和天宫一号目标飞行器的交会对接任务,极大地扩展了可数传和测控的轨道弧段,并首次实现同一波束内双目标的捕获跟踪和中继数传;2012年6月,神舟九号载人飞船发射升空,3名航天员成功完成与天宫一号的自动和手动对接任务,并进驻天宫一号,实现了多项首创.在轨13天中,大量数据㊁图像㊁音频㊁电邮及神舟G天宫组合体的测控等信息,通过中继卫星系统高质量地传到地面指控中心,为此次任务的圆满完成提供了有力的保障.1 3㊀导航定位系统载人航天器目前可同时处理我国B D二代卫星定位系统㊁G P S和格洛纳斯(G L O N A S S)卫星定位系统信号,并使用B D+G P S㊁G P S+G L O N A S S进行兼容定位,实现了全部B D和G P S卫星正常跟踪,在进行绝对定位解算前,优先选择B D导航卫星观测量.设备内部对导航处理板进行热备份,B DGG P S导航板采用B D+G P S兼容方式,处理B D卫星B1㊁B3频点和G P S卫星L1频点信号;全球导航定位系统(G N S S)导航板采用G P S+G L O N A S S兼容方式,处理G P S卫星L1和G L O N A S S卫星L1信号.系统框图如图4所示.在交会对接和撤离阶段,追踪飞行器B DGG P S兼容机通过空空通信设备获取目标飞行器原始测量数据,经过差分解算计算出2个飞行器间的相对位置和相对速度.绝对定位精度(3轴,1σ)不大于15m,绝对测速精度(3轴,1σ)不大于0 25m/s.相对测量模式分为载波固定解㊁双差伪距㊁位置差分3种.图4㊀载人航天器定位系统F i g 4㊀P o s i t i o n i n g s y s t e mo fm a n n e d s p a c e c r a f t1 4㊀空空通信系统空空通信子系统实现与来访飞行器间的数据交换,同时满足目标飞行器(天宫一号㊁天宫二号㊁天和核心舱)对追踪飞行器(载人飞船㊁货运飞船㊁光学舱)交会对接通信支持.在交会对接段与来访飞行器的空空通信设备建立双向空空通信链路,并实现手控遥操作任务.空空通信机根据距离远近具备961㊀㊀第6期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀陈晓光等:我国载人航天器测控与通信技术发展大㊁小功率切换功能.空空交会对接模式可分为自动交会对接㊁手动遥操作及径向对接3种工作模式.自动交会对接和径向交会对接模式时,双向数据传输速率较低,空空通信采用扩频方式进行通信,空空通信机a/b采用双机热备份方式工作.手控遥操作通信模式下,双向数据传输速率较高,空空通信采用非扩频方式进行通信,空空通信机a/b采用双机发射冷备份方式工作.1 5㊀出舱通信系统在神舟七号飞船航天员出舱活动时,出舱通信子系统提供了超高频(UH F)的无线通信功能,实现了无线状态下出舱航天员与舱内航天员㊁出舱航天员与地面的双向通话及生理遥测数据的传输.空间站出舱通信方案在我国载人航天工程二期出舱方案基础上,重点解决了航天员在舱外跨小区切换和功率的远近效应问题.航天员在舱外活动时,通过在舱内配置出舱通信处理器㊁舱外配置的UH F收发天线与出舱航天服通信设备建立无线双向链路,传输数据包括语音㊁遥测信息等,并实现对舱外活动100%的无线通信覆盖,如图5所示.图5㊀神舟七号和空间站航天员出舱F i g 5㊀A s t r o n a u tE V Ai nS h e n z h o uG7a n dC h i n aS p a c eS t a t i o n1 6㊀图像话音系统我国载人航天工程一期和二期的图像话音设备采用了类似电路交换的设备进行切换,设备种类多,系统复杂,使用不便.鉴于地面因特网通信技术的发展,分组交换技术已经取代电路交换技术,具有切换时间快等很多突出优点,图像话音数据可在因特网上传输㊁处理和交换,再考虑到航天员信息服务㊁显示㊁空间站信息管理等需要,设计了高速通信网,传输图像㊁话音㊁空间站信息㊁航天员办公数据等中高速数据,另外还传输系统网综合数据和舱间通信的数据,以作为系统网的备份.载人空间站舱内㊁外摄像机采用集成化㊁网络化的设计思想,将图像(含伴音)采集㊁压缩编码及网络通信功能集于一身,不需要为摄像机配置专门的图像编码及网络通信接口设备.摄像机内部完成图像模拟信号的模拟/数字(A/D)变换㊁编码压缩,形成数字图像及伴音数据后,通过以太网通信模块的以太网接口直接与通信网交换机连接,实现摄像机的网络接入.载人航天器话音通信采用集中式的话音处理方案,由话音处理器实现所有话音终端的接入㊁管理㊁通信等功能,完成天地会议通话㊁专用通话㊁出舱通信㊁舱内会议等多种模式的话音通信.中继K a频段单址(K S A)信道㊁U S B链路㊁数传链路传输天地话音,互为备份.U S B上㊁下行链路提供2条高级多带激励(AM B E)体制话音通路,包括1路任务话和1路专用话,合计32k b i t/s.中继链路由于带宽允许,提供3条高级语音编码(A A C)体制的话音,包括1路任务话和2路专用话,合计576k b i t/s.2㊀载人航天测控与通信技术发展特点根据载人航天任务需求,载人航天器测控与通信系统的发展分为3个阶段.第一阶段为U S B地基测控;第二阶段为地基测控为主,天基测控为辅;第三阶段为基于天基测控的天地一体化网络通信,地基测控为辅.第一阶段,从神舟一号至神舟五号.从1992年载人航天工程立项至神舟五号载人飞船,测控与通信系统仅有地基测控,采用U S B统一测控体制,同时包括天地话音通信㊁图像传输㊁着落信标机等产品,本阶段测控覆盖率仅为16%.第二阶段,从神舟六号至神舟十一号,以及天宫一号和天宫二号.从神舟六号开始搭载海事终端,神舟七号搭载我国第1套中继终端,首次在国内实现了基于中继卫星系统的天基测控,测控覆盖率在071㊀航㊀天㊀器㊀工㊀程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀31卷㊀神舟七号达到了44%.随着我国中继卫星系统的建设,在天宫二号时实现了3颗中继卫星的覆盖,测控覆盖率达到了88%.第三阶段,从天舟一号至空间站建成,包括神舟十二号及后续载人飞船㊁天舟一号至后续货运飞船㊁天和核心舱㊁问天实验舱㊁梦天实验舱及后续的光学实验舱.从天舟一号开始,到空间站三舱,以及后续的光学实验舱,测控与通信系统采用天地一体化网络通信,并首次在国内实现了基于I P 网络的天地通信,实现天地话音㊁图像和载荷数据的网络传输,实现空间站三舱㊁天舟货运飞船㊁光学实验舱的在轨组网通信.表1总结了载人航天器测控与通信技术的发展特点.表1㊀载人航天器测控与通信技术的发展特点T a b l e 1㊀D e v e l o p m e n t c h a r a c t e r i s t i c s o fm a n n e d s p a c e c r a f t T T &Cc o m m u n i c a t i o n s t e c h n o l o g y功能测控技术技术特点应用航天器地基测控㊀统一载波S 频段,遥控为P C M GP S K GP M ,遥测为C M GD P S K GP M ,测距为3~110k H z ㊀分立器件㊁直插元件,遥测16k b i t /s,质量5 1k g㊀神舟一号~神舟八号㊁天宫一号㊁天宫二号㊀集成芯片㊁表贴元件,采用了E S A 标准频率流程,遥测16~64k b i t /s 自适应,采用小型化设计,质量2 5k g㊀神舟九号~神舟十四号㊁天舟一号~天舟四号㊁天和核心舱㊁问天实验舱㊁梦天实验舱数传㊀S 频段㊀两路768k b i t /s 数据分别为图像话音数据的I 支路㊁飞船平台数据的Q 支路㊀神舟一号~神舟十四号㊁天舟一号~天舟四号天基测控㊀S 链路㊁K a 链路:由高速通信处理器㊁中继综合单元㊁K a接收组件㊁K a 发射组件及中继天线组成,中继天线共用1套展开及伺服机构㊀S 前向:U Q P S K+扩频,传输速率2k b i t /s ;S 返向B P S K+扩频,传输速率20k b i t /s ;K a 前向:S Q P S K ,传输速率50k b i t /s ;K a 返向:S Q P S K ,传输速率1 6M b i t /s ㊀神舟七号~神舟十四号㊀S 前向:U Q P S K+扩频,传输速率2k b i t /s ;S 返向:B P S K+扩频,传输速率20k b i t /s ;K a 前向:S Q P S K ,传输速率5M b i t /s ;K a 返向:S Q P S K ,传输速率144M b i t /s㊀天舟一号~天舟四号㊀S 前向:U Q P S K+扩频,传输速率2k b i t /s ;S 返向:B P S K+扩频,传输速率32k b i t /s ;K a 前向:S Q P S K ,传输速率10M b i t /s ;K a 返向:S Q P S K 和8P S K ,传输速率1 2G b i t /s㊀天和核心舱㊁问天实验舱㊁梦天实验舱(使用二代中继卫星)卫星导航系统㊀接收G P S 导航卫星信号㊀G P S :L 1频段㊀神舟一号~神舟七号㊀兼容B D ,G P S ,G L O N A S S 导航卫星系统㊀B D :B 1,B 3频段;G P S :L 1频段;G L O N A S S :L 1频段㊀神舟八号~神舟十四号㊁天舟一号~天舟四号㊁天和核心舱㊁问天实验舱㊁梦天实验舱空空通信系统㊀自动交会对接㊁手控遥操作㊁径向交会对接㊁前向交会对接及转位㊀扩频模式为B P S K 调制,传输速率为2 8k b i t /s和28k b i t /s ;非扩频模式为D Q P S K 调制,传输速率为3 55625M b i t /s 和5 725M b i t /s ㊀神舟八号~神舟十四号㊁天舟一号~天舟四号㊁天和核心舱㊁问天实验舱㊁梦天实验舱出舱通信系统㊀UH F 无线通信:舱通信处理器+舱内外出舱通信天线㊀UH F 无线通信(点对点通信)㊀神舟七号㊀前返向频分㊁码分体制,采用内㊁外环联合功率控制及R a k e 接收技术㊀天和核心舱㊁问天实验舱㊁梦天实验舱图像话音系统㊀M P E G 2/M P E G 4图像压缩算法/H 264编码㊀标清图像:M P E G 2图像压缩算法,单幅768k b i t /s图像(含伴音);话音采用集中混音策略,任务话㊁专用话㊀神舟一号~神舟六号㊀标清图像:M P E G 4图像压缩算法,单幅768k b i t /s图像(含伴音)或双幅384k b i t /s 图像(含伴音);图像编码器集中处理,统一调度,进行 6选2 或 6选1 图像切换;话音采用集中混音策略,任务话㊁专用话㊁协同话㊀神舟七号~神舟十四号㊀高清图像:采用H 264编码;舱内外摄像机采用集成化㊁网络化设计,集成图像采集㊁压缩编码;话音采用集中混音策略,任务话㊁专用话㊁协同话及在轨拨号的I P 电话㊀天舟一号~天舟四号㊁天和核心舱㊁问天实验舱㊁梦天实验舱㊀㊀(1)载人航天测控与通信系统的发展方向具有小型化㊁集成化㊁通用化㊁高性能的特点.(2)导航接收机的从单频到多频,从以G P S 为主份转换为B D 为主份.171㊀㊀第6期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀陈晓光等:我国载人航天器测控与通信技术发展(3)在对地数据传输通信方面,数据传输在数据率㊁传输频段㊁设备集成度等方面均取得了较大的进展.速率由低向高㊁单通道向双通道发展㊁分立单机向集成化发展㊁空间站中继数传达到1 2G b i t/s.(4)测控与通信系统为增加鲁棒性,普遍采用了自主管理设计,当诊断出信道或基带因空间环境影响出现故障时进行自主复位或断电操作,使系统能够快速㊁自主恢复,减少了地面人为干预,提升了效率.(5)高速测控与通信㊁B D短报文㊁二代测控中继终端㊁在无地面干预自主测控技术,均已在载人航天器中得到应用验证.3㊀载人航天测控与通信技术发展趋势为满足载人航天发展新阶段对测控与通信技术的需求,载人航天测控与通信技术有以下发展趋势.(1)批产化㊁通用化.通过测控通信产品的标准化㊁模块化,以满足测控通信产品状态统一和批产化的需求.在批生产方面,需要由分立单机装配方式向采用先进构架㊁集成统一单板和无缆化装配方式转换,如采用统一功能板,通过配备不同软件来实现各种功能[10].(2)测控管理自主化㊁高效化.通过无依托自主测控㊁星间数据交互等有效测控手段,满足大规模多航天器的高效测控管理需求.(3)数字化㊁小型化.采用先进的数字技术降低成本,用软件技术实现相关功能,借用先进的工业技术成果,使设备集成度更高㊁性价比更高㊁成本更低.(4)通过推动以激光㊁K a频段高速数据传输为代表的先进技术应用,满足提升通信性能的需求.4㊀发展建议在载人航天测控与通信技术发展趋势牵引下,后续重点研究的几项测控与通信领域关键技术如下.(1)应答机抗干扰抗截获技术.充分利用在研载人航天器,推进扩跳频应答机在轨验证,建立型谱.开展宽带扩跳频技术研究,提升抗干扰性能.(2)导航接收机抗干扰技术.开展高精度抗干扰㊁干扰检测等技术攻关.(3)多模通用化测控终端设计技术.开展 技术状态系列化,硬件平台通用化,特殊模块组合化 先进硬件技术研究工作,应用软件无线电技术,形成多功能㊁多体制㊁通用化的多模测控终端工程化产品.(4)一体化通信架构技术.开展先进通信系统架构研究,基于标准化㊁通用化通信接口及平台处理模块,实现具有可重构㊁智能化能力的批产化一体通信产品.(5)新体制高速数传技术.针对Q/K a频段开展16A P S K/32A P S K高阶调制技术研究,实现自适应编码调制(AM C)技术,完成在轨载人航天器与地面数据传输平均速率最大化.参考文献(R e f e r e n c e s)[1]张越,洪家财.G N S S星间测控技术发展现状与趋势[J].电子测量技术,2018,41(23):117G122Z h a n g Y u e,H o n g J i a c a i.D e v e l o p m e n t t r e n d so fG N S S i n t e rGs a t e l l i t e st e c h n o l o g i e s[J].E l e c t r o n i c M e a s u r eGm e n tT e c h n o l o g y,2018,41(23):117G122(i nC h i n e s e) [2]单长胜,李于衡,孙海忠.中继卫星支持海量航天器在轨测控技术[J].中国空间科学技术,2017,37(1):89G96S h a nC h a n g s h e n g,L i Y u h e n g,S u nH a i z h o n g.T r a c k i n g a n dd a t a r e l a y s a t e l l i t e s y s t e mf o r h u g e n u m b e r s a t e l l i t e c o n t r o l[J].C h i n e s e S p a c e S c i e n c ea n d T e c h n o l o g y,2017,37(1):89G96(i nC h i n e s e)[3]闫林林.卫星测控数传一体化的设计与实现[D].南京:南京理工大学,2018Y a nL i n l i n.D e s i g na n dr e a l i z a t i o nt h eT T&Ca n dd a t a t r a n s m i s s i o n i n t e g r a t e ds y s t e mo f s a t e l l i t e s[D].N a n j i n g: N a n j i n g I n s t i t u t e o fT e c h n o l o g y,2018(i nC h i n e s e) [4]罗大成,刘岩,刘延飞,等.星间链路技术的研究现状与发展趋势[J].电讯技术,2014,54(7):1016G1024L u o D a c h e n g,L i u Y a n,L i u Y a n f e i,e ta l.P r e s e n t s t a t u s a n dd e v e l o p m e n t t r e n d s o f i n t e rGs a t e l l i t e l i n k[J].T e l e c o mm u n i c a t i o nE n g i n e e r i n g,2014,54(7):1016G1024(i nC h i n e s e)[5]C l a r k GJ,E d d y W,J o h n s o nS K,e ta l.A r c h i t e c t u r e f o rc o g n i t i v en e t w o r k i n g w i t h i n N A S A sf u t u r es p a c e c o mm u n i c a t i o n s i n f r a s t r u c t u r e[C]//P r o c e e d i n g so f t h e 34t hA I A AI n t e r n a t i o n a lC o n f e r e n c eo nS p a c eO p e r a t i o n s.W a s h i n g t o nD.C.:A I A A,2016:1G10[6]李佩珊.一体化测控通信传输体制研究[D].成都:电子科技大学,2016L i P e i s h a n.R e s e a r c ho nt h e i n t e g r a t e dT T&Ca n dc oGmm u n i c a t i o n t r a n s m i s s i o ns y s t e m[D].C h e n g d u:U n iGv e r s i t y o fE l e c t r o n i cS c i e n c ea n dT e c h n o l o g y o fC h i n a,2016(i nC h i n e s e)[7]I s r a e lDJ,H e c k l e rG W,M e n r a dRJ,e t a l.E n a b l i n g c o mm u n i c a t i o na n d n a v i g a t i o nt e c h n o l o g i e sf o rf u t u r e271㊀航㊀天㊀器㊀工㊀程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀31卷㊀n e a r e a r t hs c i e n c em i s s i o n s[C]//P r o c e e d i n g so f I n t e rGn a t i o n a lC o n f e r e n c eo nS p a c e O p e r a t i o n s,2016.W a s hGi n g t o nD.C.:A I A A,2016:1G9[8]雷厉.航天测控通信技术发展态势与展望[J].电讯技术,2017,57(12):1464G1470L e i L i.D e v e l o p m e n t s t a t u sa n dt r e n d so f s p a c eT T&C a n d c o mm u n i c a t i o n t e c h n o l o g y[J].T e l e c o mm u n i c a t i o n E n g i n e e r i n g,2017,57(12):1464G1470(i nC h i n e s e) [9]蒋罗婷.国外小卫星测控通信网发展现状和趋势[J].电讯技术,2017,57(11):1341G1348J i a n g L u o t i n g.D e v e l o p m e n t a n d t r e n d s o f f o r e i g n T T&Ca n d c o mm u n i c a t i o nn e t w o r k s f o r s m a l l s a t e l l i t e s [J].T e l e c o mm u n i c a t i o n E n g i n e e r i n g,2017,57(11):1341G1348(i nC h i n e s e)[10]饶启龙.航天测控技术及其发展发向[J].信息通信技术,2011,5(3):77G83R a oQ i l o n g.S u r v e y o nd e e p s p a c eT T&Ca n d c o mm uGn i c a t i o n t e c h n o l o g y[J].I n f o r m a t i o na n dC o mm u n i c aGt i o n sT e c h n o l o g i e s,2011,5(3):77G83(i nC h i n e s e)(编辑:夏光)371㊀㊀第6期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀陈晓光等:我国载人航天器测控与通信技术发展。
数据中继卫星:把测控站搬上太空

太空探龛一勲据中继卫星专题数据中继卫耙测控站搬文/杨诗瑞2021年12月14H,天链二号02星在西昌卫星发射中心成功发射,这是我国第二代中继卫星系统的首颗装备星,将为载人航天器、卫星、运载火箭以及非航天器用户提供数据中继、测控、传输等服务。
我国发射中继卫星数量增加至7颗,两代中继卫星相互兼容、在轨协同组网工作,天基中继系统的稳定性、可靠性、灵活性及服务能力进一步提升,将为我国建设航天强国提供重要支撑、建设天基测控站A长征三号乙运载火箭发射天链二号02星跟踪与数据中继卫星系统是为中、低轨道的航天器与航天器之间、航天器与地面站之间提供数据中继、连续跟踪、测控服务的系统。
中继卫星又被称为“卫星的卫星”,是卫星家族中数量较少却非常重要的一员,一般位于地球静止轨道,从上向下覆盖用户航天器。
航天时代早期,人们发现,受地球曲率和无线电波直线传播特性的影响,低轨卫星绕地球飞行一圈期间,单个地面站只有2%~3%的时间能够“看”到卫星,实施测控的轨道弧段和通信时间都非常短暂。
为了克服这个问题,人们通过建设地面站、建造测量船和飞机等方式,扩大测控网络,延长对航天器的实时测控时间,但耗资巨大且效果一般。
对于轨道高度300千米的卫星,为了满足100%覆盖,必须在全球范围建设100多个合理分布的地面站,许多站点必须设在国外或公海。
随着人类进入太空,为载人飞船与地面指挥中心提供实时联络成为关乎航天员生命安全和载人飞行任务成败的关键,仅靠扩大地面测控网已难以满足需求为了从根本上解决问题,人们提出中继卫星系统的概念,把测控站搬上太空,为航天器提供实时测控和数据中继服务运行在地球静止轨道的中继卫星,单颗就能观测到大部分运行在近地轨道的航天器,双星组网可以基本覆盖整个中、低轨道空域。
中继卫星以较低的成本和较少的地面站解决了地面测控网覆盖率低的问题,可以实现对地基测控“不可见”用户的信息传输,为航天器提供跟踪、测量服务,承担通信和数据传输中继业务,从而极大提高航天器的使用效益和应急能力.随着人类对太阳系的探索不断深入,飞向月球、火星的探测器都需要不间断的测控和数据回传支持,还需要部署专用的月球、火星与地球数据传输中继卫星,为深空探测任务提供测控和通信支持。
卫星发射有关知识
答案:有利条件:纬度低,海运便利,地 形平坦开阔,人口稀少稀处
2.发射时间、方向和回收场地选择
要素
具体要求
发射时间:在一天中一般选择在晴朗无云的夜晚,主
发
要便于定位和跟踪观测
射
我国发射时间:主要选择在秋冬季节,便于航天测控
时
网对飞船的监控、管理、回收。我国有多艘“远望
间
号”
监测船在南半球纬度较高的海域,选择在秋冬季节发 射是为了避开南半球恶劣的海况
发射 一般与地球运动方向一致,向东发射可充分利用自转 方向 线速度的作用,节约能源
回收场 我国的回收场地在内蒙古自治区中部地区。地势平 地选择 坦,视野开阔,便于搜救;人烟稀少,有利于疏散人群;气
【真题2】(2010·浙江)下图是某区域略图。读 图,完成下列问题。
简述①地建设航天发射基地的有利条件和不利因素。
条件
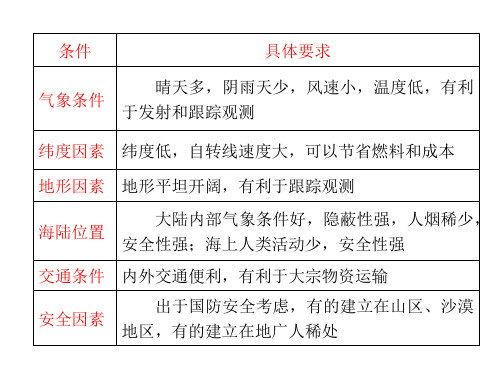
具体要求
晴天多,阴雨天少,风速小,温度低,有利 气象条件
于发射和跟踪观测
纬度因素 纬度低,自转线速度大,可以节省燃料和成本
地形因素 地形平坦开阔,有利于跟踪观测 大陆内部气象条件好,隐蔽性强,人烟稀少,
海陆位置 安全性强;海上人类活动少,安全性强
交通条件 内外交通便利,有利于大宗物资运输 出于国防安全考虑,有的建立在山区、沙漠
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卫星和飞船的跟踪测控分析 摘 要: 建立区域卫星导航系统的测控网是卫星导航系统要解决的关键问题之一。本文讨论我国测控站的布设问题,利用MATLAB建立卫星或飞船运行模型,计算出测控站需要个数,结合CAD画图来分析测控站对卫星或飞船的可观测性。分析测控站对卫星或飞船的全程观测的影。利用我国有限的国土跨度和航天测控资源确保对卫星或飞船的全称测控任务的完成。 区域导航卫星的特殊性和混合轨道的复杂性对测控站的布局提了性的要求,从测控站对导航卫星的可见性,观测几何强度以及跟踪定轨精度的几方面来看,在国内布设测控站能满足卫星导航系统的基本测控要求,但各测控站应尽量拉开,基线越长,测控站几何条件越优。 对于问题一,通过分别假设卫星绕地球运行的轨道是一个圆和一个椭圆来建立两个模型,通过模型的求解得到了在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立3个测控站才能对其进行全程跟踪测控。 对于问题二,卫星或飞船的运行轨道有一固定夹角,且卫星或飞船在离地面高度h的球面S上运行。我们将卫星或飞船的运行轨道投影到地球表面上,得到如图03-2所示,由于卫星或飞船的运行轨道不变,而地球不断在自转,所以轨道的投影面在不断变化,所以测控站全程测控的范围即为卫星轨道的投影面。 对于问题三,我们在互联网上搜索神七发射时的测控站点的分布信息,此时将这些数据作为有效数据进行卫星定轨,并结合问题一和问题二的解题步骤,分析这十个测控站点对神七所能测控的范围。通过模型的求解得到了在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立10个测控站才能对其进行全程跟踪测控。
关键词: 区域卫星导航系统 测控站 全程跟踪测控 星下点 覆盖 1 问题的重述 区域卫星系统导航系统可采用地球静止轨道(GEO)、倾斜地球同步轨道(IGSO)和中高轨(MEO)等混合轨道的卫星,它不仅要求轨道确定和轨道预报精度高,而且对轨道确定是实时性,轨道预报及事后精密轨道的时效性也有较高要求.我国区域卫星导航系统一版主要在国内建立测控网,因此,合理布局测控站,建立卫星导航系统测控网是我国卫星导航系统首先要解决的关键问题之一,所谓布局是指测控网为完成对卫星的跟踪、观测定轨和控制,地面站布设位置要合理,所需的地面站数要最少,实质上是解决对卫星轨道的覆盖问题。测控站的布局将直接影响对导航卫星的跟踪观测、卫星的轨道精度和导航性能,各个卫星导航系统都非常重视测控网的布局和建设,它既是卫星导航的技术手段,又是构成卫星导航系统定位的几何基准,它还以社会依托条件、气象条件、地形条件和地址水纹条件有关,是一项复杂的系统工程。 目前,我国的卫星测控站主要分布在国内,由于这些测控站都分布在北半球,对我国的卫星导航系统来说,其跟踪条件有限。本文讨论国内测控站是否满足对我国卫星导航系统测控任务,并对国内布设测控站进行分析。 下面是一个卫星或飞船的测控问题,测控设备只观测到所在点切平面以上的空域,且在于地平面夹角3度的范围内侧效果不好,所以在一个卫星或飞船发射和运行过程中,需要多个测控站联合完成测控任务。假设:卫星或飞船离地球表面的距离为h;卫星或飞船绕地球运行的轨道为圆形或椭圆形。现有如下问题需要解决。 1. 假设所有测控站都与卫星或飞船的运行轨道共面,为了对其进行全程跟踪测控应至少建立多少个测控站。 2. 假设一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面上运行。考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,则为了对该卫星或飞船可能飞行的区域全部覆盖已达到全程跟踪测控的. 3. 收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,并对这些测控站点对该卫星所能测控的范围进行分析。
2 问题分析 问题一: 在所有测控站都与卫星或飞船的运行轨道共面的情况下,测控站覆盖的区域与地平面夹角等因素有关。测控站的覆盖区域定义为由测控站引向卫星或飞船的3度以上所包围的区域,即测控站仰角为3°时正好能观察卫星的边缘线所包围的轨道区域,如图1中弧线EDF所在的区域,测控站对卫星才具有“可见性”。所以我们可以假设卫星或飞船的运行轨道被n个测控站的测控视线范围所覆盖,n即为至少需要的测控站个数。 问题二:
由题可知,卫星或飞船的运行轨道有一固定夹角,且卫星或飞船在离地面高度h的球面S上运行。因此我们将卫星或飞船的运行轨道投影到地球表面上,得到如图5所示,由于卫星或飞船的运行轨道不变,而地球不断在自转,所以轨道的投影面在不断变化,如图6所示,把纬线周长转变为两条直线,则纬线将会被n个测控站的测控范围所覆盖即卫星轨道投影面被n个测控站的测控范围所覆盖。 问题三: 该题要求收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,我们已从互联网上收集了我国神七发射的相关资料并运用问题2中的模型二中的模型求解方法进行求解,并对求解的结果进行了客观的分析,由于模型二的建立是在理想状态下存在的,可神七运行时,受到外界的因素干扰(比如:大气摩擦等等), 因此运用问题2中的模型二来分析神七发射时测控站点的分布信息有所欠缺,我们须采用曲线形布置测控点才能更全面的测控以至于达到全程跟踪.
3 模型假设 1. 假设高空气体的摩擦对人造卫星的运行轨道和运行速度无影响; 2. 假设地球是一个规则的球体;
4 符号的说明 观测视线卫星弧段EF中点D与观测视线边缘点E的夹角 观测站点Q与地球球心O的夹角
h 卫星或飞船距地球表面的距离 hr 卫星或飞船距地球球心O的距离 地平面 a 卫星或飞船运行椭圆轨道上的点P到椭圆圆心1O的长半轴
c 椭圆圆心1O到地球球心O的距离即椭圆的焦距 卫星或飞船的运行轨道与地球赤道面平面的夹角 星下点 造地球卫星在轨道上的每一个位置都会在地球表面上有一个投影
5 模型的建立与求解
5.1 问题一的模型建立与求解 经分析在测控站都与卫星或飞船的运动轨道共面的情况下,为使测控站能对卫星进行全程跟踪测控.采用几何分析法建立模型如下: 模型一: 假设卫星绕地球运行的轨道是一个圆 经查资料知,地球半径r=6371.004km,同步卫星距地面高度h=35900km, 同步气
象卫星距地面高度h=35800,嫦娥一号同步卫星距地面高度500h~41012.8,极地卫星距地面高度h=600~1500.如图1可知,要使卫星轨道被全程测控,也就是半径为hr的的圆周长要被n段圆弧EDF所覆盖,即转化为如图2所示,把EDF所在轨道的圆周长转变为一条直线,被n个测控站的测控范围所覆盖。 图1 图2 由几何关系知hrr93sinsin ])(93sinarcsin[93180hrr
])(93sinarcsin[hrr
)()]93sinarcsin(2174[2EDFhrhrrhr)(的长度弧
0726.2])()18093sin(arcsin[87180180)18093sin(arcsin18087])(93sinarcsin[87)()(2:hrrhrrhrrEDFEDFhrn为弧长需设的测控站个数
3n 即在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立3个测控站才能对其进行全程跟踪测控。
模型二:假设卫星绕地球运行的轨道是一个椭圆 经查资料知,地球半径r=6371.004km,同步卫星距地面高度h=35900km, 同步气象卫星距地面高度h=35800,嫦娥一号同步卫星距地面高度h=500~128000,极地卫星距地面高度h=600~1500.如图3可知,要使卫星轨道被全程测控,又无旋地球上的星下点轨迹只与轨道倾斜角及升结点位置有关,即只与轨道在惯性空间的位置有关,在同一轨道平面内的轨道,不论其形状为圆或椭圆,也不论椭圆轨道的近地点在什么位置,它们的星下点轨迹相同。因此把椭圆轨道作为以近地点距离为半径的圆的圆轨道处理,故计算同上,卫星离近地点的距离为:rca,离远地点的距离为:离近地点的距离为:hra22
])()18093sin(arcsin[87180hrrn通过
得出: h=35900时, n=2.0726 h=35800时, n=2.0726 h=500时, n=2.0975 h=128000时, n=2.0701 h=600时, n=2.0967 h=1500时, n=2.0916 由各个卫星运行时的测控站结果可知:要使卫星被全程监控,测控站个数3n
图3 5.2 问题二的模型建立与求解 基于地球是一个规则的球体,为方便对其求解,现将其简化为一个球面,得到如图4所示的一个平面图。
模型一: 当卫星或飞船的运行轨道与地球赤道平面的夹角为0(即0)且卫星在离地面高度为h的球面上运行时,要对卫星或飞船可能飞行的区域全部覆盖,以达到全程跟踪测控的目的,而且所需建立的测控站有要最少。则只有当所有测控站都与卫星或飞船的运行轨道共面时才能满足要求。那么这种情况和问题一中的模型一类似,模型求解在问题一的模型一中已给出,无论h离地球球面多远,所需的测控站都为3个。 模型二:
当卫星或飞船的运行轨道有一固定夹角且夹角不为0和90(即
0<<90),且卫星或飞船在离地面高度h的球面S上运行。为了方便求解但
又不影响计算,故将图简化成如图5所示的平面图。 当以地球为参照物时,卫星相对地球运动的轨迹为球带02,现将卫星轨迹投影到地球表面即可得到图5中的球带01,所以卫星运行时,可能经过地球表面的地方一定在球带01上,即在球带01上合理布置测控点将卫星的运行轨迹进行全程测控。由投影原理可知,如果测控站能全程覆盖圆柱体,那么测控站就一定能覆盖球带02,如图6所示,将圆柱展开长方形,由于测控站覆盖面是一个圆,故用圆覆盖长方形即可。
图4
图5