船舶行业数据云解决方案V1
船载航行数据记录仪(VDR)使用中常见问题和改进建议

船载航行数据记录仪(VDR)使用中常见问题和改进建议作者:李帅蒋卫东来源:《航海》2021年第01期摘要:VDR作为记录船舶航行参数的重要设备,无论在事故调查还是在公司船队管理中都扮演着重要的角色。
然而,在事故调查过程中我们经常发现,由于部分船员缺乏VDR设备的相关知识或因工作中的疏忽,导致VDR设备在使用过程中存在诸多问题。
本文通过梳理VDR设备的法定要求和使用现状,探讨VDR设备在使用过程中的常见问题,分析原因,对公司管理人员和船员如何更好地使用VDR设备提出了建议。
关键词:VDR;常见问题;建议措施;最新动态1 船载航行数据记录仪的应用背景和功能1.1 船载航行数据记录仪产生的背景全球化经济的迅猛发展使得海上贸易量激增,随之而来的是各类水上交通事故对人命安全和海洋环境造成的极大威胁。
为查明事故原因,防范事故再次发生,需要再现事故发生前后船舶的实际状态及船员所采取的应对措施。
过去,人们仅仅依赖于航海日志、车钟记录等简单的文字记录及当事人的回忆来进行海事调查。
然而,这样的手段显然不够科学和严谨。
因此,IMO借鉴早已在飞机等其他交通工具上使用并已被实践证明行之有效的“黑匣子”,船载航行数据记录仪(VDR)在这种背景下应运而生。
1.2 船载航行数据记录仪的功能和记录信息VDR是以一种安全和可恢复的方式存储船舶发生事故前后一段时间内的船舶航行动态、驾驶台语音、设备状况、周边环境等信息的专用装置。
这些信息包括:日期和时间、船位、速度、艏向、驾驶台声音、VHF通信、雷达、AIS、水深、驾驶台主报警、操舵指令和响应、主机操作和指令等;如果设备有串行输出接口时,还包括:船舶开口状态、水密门和防火门、加速度和船体应力、风向和风速等。
考虑到“老旧”船舶的一些设备无法提供标准的VDR接入信号,IMO提出符合条件的船舶可以安装SVDR(简易航行数据记录仪)进行代替。
SVDR的功能和系统组成部分与VDR相比基本相同,只是记录的数据项目较VDR少。
无人船解决方案

M&&a防市场应用
• • • 随着无人机在战争中发挥越来越重要的作用,各种无人系统如雨后春笋般蓬勃发展。如今,无人驾驶水面舰艇也开始崭露头角,逐渐应用 于水雷侦察和战场环境评估,而且在港口护卫、传感器部署、情报、监视侦察、猎雷、反潜、后勤支援,甚至反舰作战等方面也表现出巨 大的发展潜力。 水面无人舰艇正成为兵器王国中的一支重要力量。在水面无人舰艇研发和使用领域,美国一直处于领先地位。除美国外,不少国家也已开 展军用水面无人舰艇的研制工作。许多私营防务公司也纷纷推出自己的无人艇型号,以便在逐渐兴起的军用无人艇市场中占据有利地位。 以色列武装部队是使用水面无人艇的先驱。以色列的拉斐尔公司、埃尔比特系统公司和航空工业公司都出口水面无人艇。拉斐尔公司把 “保护者”水面无人艇描述成一个海上综合战斗系统。它采用9米长的刚性充气船体,搭载海上导航雷达、全景摄像机、可见光/红外传感 器、目标传感器以及一个固定式遥控武器站,可配备各种射程的小口径炮,能够满足海上反恐、部队警戒、保护海上安全和港口安全的任 务要求。 以色列航空工业公司2006年出售的“海星”号无人艇同样采用刚性充气船体,长约11米,宽约3.5米,重达6000公斤,靠2台功率为470马力 的船用柴油机提供动力,能以83公里/小时的航速巡航,能在550公里外连续10小时执行任务。凭借重达23.5吨的负载能力,“海星”号能安 装一个功能全面的任务设备包,其中传感器套件包括可用于侦察、监视和目标搜索的昼夜红外/可见光传感器、声呐和可用于电子支援、电 子对抗、电子侦察和通信侦察的电子战套件。它的主要攻击武器是一个带有独立目标传感器的炮座,而配备的其他非致命武器主要包括水 枪、声音播放器、非放射性致晕设备等。此外,埃尔比特系统公司生产的中型“银色马林鱼”和稍小的“海貂鱼”高速水面无人艇也是目 前无人艇产品中的佼佼者。 英国海军的“浅水漂浮扫雷系统”也已装备部队,并且在2003年3月北波斯湾的扫雷行动中用于实战。英国国防部早在数年前就开始通过 “海面效应”(MSE)项目研究无人艇在水上战场中的应用和效力,以评估军用无人艇在英国海军中可能担任的作战角色。这项研究由英 国国防部水面装备能力主管部门资助,由BEA系统公司下属的一家咨询机构领导。最初阶段实验于2007年上半年在苏格兰西海岸的英国水 下测试和评估中心进行。参与实验的有英国奎奈蒂克公司的“卫兵”迷你无人艇、遥控“太平洋22”刚体充气艇、ASV公司的“SASS 6M MkⅡ”无人艇,以及BEA系统公司的“护身符”自主潜航器。 其中的“卫兵”无人艇是一种模块化设计,满足海军军事设计要求的快速、低雷达截面积的侦察监视无人艇,采用基于滑行船体的紧凑型 喷水推进。该艇时速可达90公里/小时,续航力约6小时,艇长3.5米,艇宽1.25米,水线以上高度仅1.1米。一个简单的基于PC的远程控制台 可以使操作人员在视距外完全控制无人艇和艇上设备。该艇能够携带多种有效载荷,执行海港巡逻和安全、侦察监视,以及拦截入侵者等 任务。 瑞典海军在2008年7月和10月对“SAM3”无人扫雷艇进行海试,该艇采用双体船型,长14.4米,宽6.7米,由两个190马力的柴油发动机提供动 力,由非永磁复合材料制成,在3米至60米深的浅水区域作业,利用电磁信号模拟器和声信号效应器实现扫雷,可以在荷兰海军的“阿尔克 马尔”级猎雷艇上进行遥控,也可以完全自主地执行扫雷任务。德国和丹麦海军也已经装备“雷达控制无人艇”,应用于排雷作战。(
甚高频数字交换系统发展现状及推进工作建议

为保障船舶交通安全,满足日益增长的海上通信需求、缓解船舶自动识别系统(AIS )链路数据压力、全面提升海上通信网络性能,甚高频数字交换系统(VDES )应运而生,VDES作为AIS的增强版和升级版,自2013年由国际航标协会(IALA)提出以来,便引起学术界、海事部门的广泛关注。
经过多年的发展,VDES进入全球海上遇险与安全系统(GMDSS)基本已成为定局,在这种趋势和背景下,分析探讨我国VDES系统建设实施思路显得十分重要,可有效指导我国VDES建设,也是对“交通强国”和“海洋强国”战略实施的重要支撑。
一、VDES架构VDES系统建立地面与卫星两大系统,不仅能满足当前地面船—船、船—岸之间的数据交换,大大增强现有水上无线电信息通信能力,还将在技术和频谱资源方面,为未来进一步实现卫星与船舶之间的远程双向数据交换预留空间。
VDES地面系统由岸基部分和船载部分组成。
其中,The Current Situation of VHF Digital Interchange System Development and Associated Work Carrying out Recommendations甚高频数字交换系统发展现状及推进工作建议王福斋1,胡 青2,姚高乐3,易中立1王福斋,交通运输部规划研究院安全所副所长,高级工程师,国家注册咨询工程师、国家注册安全工程师、交通运输部青年科技英才,交通运输部北斗系统应用专家组专家、交通运输部高分系统应用专家组专家、交通运输部交通战备专家、交通运输部科技专家库专家、科技部天地一体化专项专家、中国航海学会通信导航分委会委员、中国水运建设行业协会科技创新分委会委员、交通运输部海事局航海保障分委会专家、澳门城市大学特聘顾问。
主要从事交通安全、交通应急、通信导航规划研究等工作和海事系统、救助打捞、长江航务以及部直属单位建设项目可行性研究、设计、后评价、项目管理、技术服务和系统集成等工作。
中国远洋公司船舶主要技术数据

上边柜压载水舱舱容 m3(立方米) No.1 P&S 1121 No.2 P&S 955.8 No.3 P&S 955.8 No.4 P&S 955.8 No.5 P&S 945.8
可空货舱舱号 NO.2.4
舱 No.1 No.2 No.3 No.4 No.5 No.6 No.7 No.8 No.9 No.10 No.11 货舱舱口尺寸及舱口围高度 m(米) 舱 号 舱口长宽尺寸 舱口围高度 No.1 20.0*15.0 1.2 No.2 20.8*18.3 1.2 No.3 20.8*18.3 1.2 No.4 20.8*18.3 1.2 No.5 20.8*18.3 1.2 No.6 No.7 No.8 No.9 No.10 No.11 可压水货舱舱号 No.3 20.8*18.3 1.2
l/h(升/小时)
滑 油 分 油 机 SJ16T 2 1650 l/h(升/小时) 手控
MITSUBISHI KAKOKI KAISHA
油 水 分 离 器 HMS-200 型 FOCAS-1500C 2000 l/h(升/小时)
HEISHI PUMP WORKS CO LTD
主 空 调 装 置 6DR3-4000-FDS 1 129,000 kcal/h(大卡/小时) NAMIREI CO LTD 伙食冰机装置 2C582LE-CF 2 3300 kcal/h(大卡/小时) NAMIREI CO LTD 主 机 滑 油 泵 MST-110T 2 112 m3/h(立方米/小时) 0.5 Mpa(兆帕) 37 kw(千瓦)
KSH-4
柴 油 分 油 机 型 号 台 数 额定分油量 自控/手控 制 造 厂 型 号 台 数 额定分油量 自控/手控 制 造 厂 型 号 监控装置 分 离 量 制 造 厂 型 号 造 水 量 制 造 厂 型 台 号 数 型 号 台 数 制 冷 量 制 造 厂 型 号 台 数 制 冷 量 制 造 厂 型 台 排 压 功 制 造 型 台 排 压 功 制 造 型 台 排 压 功 制 造 型 台 排 压 功 制 造 号 数 量 头 率 厂 号 数 量 头 率 厂 号 数 量 头 率 厂 号 数 量 头 率 厂
船舶自动操舵仪故障分析及其解决方案
船舶自动操舵仪故障分析及其解决方案作者:李成玉摘要:文章分析了半导体分立元件和集成电路设计的自动舵工作原理,指出它们的缺点及其故障产生的根本原因。
应用可编程序控制器(PLC)技术研制的自动舵,克服了常规自动舵的缺点及其参数整定困难和控制效果的不足。
自整定比例微积分调节器(PID)自动舵能够自动适应船况和海况的变化,实现无扰动切换、变增益调节、抗积分饱和、微分先行等功能,克服了舵机振荡。
实船应用证明了该自整定比例微积分调节器船舶自动舵的有效性。
0引言船舶自动操舵仪是保证船舶安全航行的重要设备,而舵机振荡出现的故障率最高。
我国造船工业已具规模,每年生产艘数甚多的小型船舶,开发出性能可靠、价格合理的船舶自动操舵仪,完全可以得到推广和应用。
针对船舶自动操舵仪出现的故障,分析了其控制单元的特点及工作原理,给出了通用的性价比高的技术解决方案。
1常规自动舵控制单元分析1)半导体分立元件自动舵。
半导体分立元件正常工作需要一定的条件,若超出其允许的范围,将不能正常工作,甚至造成永久性的破坏。
对于大功率管的功耗能力并不服从等功耗规律,其工作电压升高,其耗能功率相应减小。
三极管在工作时,可能Uce并未超过BUceo,Pc也未达到Pcm,而三极管已被击穿损坏了。
因此,使用半导体模拟元件要考虑di/dt、du/dt的影响,即使在其允许工作范围内也可能造成损坏。
特别是外延型高频功率管,在使用中要防止二次击穿。
元器件老化、特性飘移,引起性能下降、工作不稳定,故障率最高。
2)集成电路设计的自动舵。
集成电路与分立元器件组成的电路相比,具有体积小、功耗低、性能好、重量轻、可靠性高、成本低等许多优点。
但同样对电源电压、温度、湿度等外界因素变化敏感,其内部又存在固有噪声,这些将引起回路特性和参数变化,降低其稳定性和可靠性。
其功能扩展困难,难以调试,不能在线修改和故障诊断,对制作工艺要求很高。
故障分析和排除十分困难。
3)舵机振荡出现的几率最高。
船岸数据通信实测分析-数据通信论文-通信传播论文

船岸数据通信实测分析-数据通信论文-通信传播论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:在海洋经济繁荣发展,信息技术日新月异的时代,实现船岸之间的低成本高速率数据通信是时代的呼唤。
本文通过在厦门湾进行长距离WiFi技术的通信实测,分析利用该技术实现船岸数据通信的可行性和改善空间。
关键词:长距离WiFi数据通信实测1.背景早在春秋时代,《管子海王》篇就曾提出“观山海”“以为国”的思想,前瞻地察觉到海洋蕴含的财富作用对于国家强盛的重要性。
近代先驱孙中山指出港口是“中国与世界交通运输之关键”。
十八大报告首提“海洋强国”,提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,建设海洋强国。
然而,当今城市居民几乎可以随时随地不受限制地使用Internet和各种数据服务,占地球表面积70%以上的大部分海洋区域却几乎无法接收到无线宽带网络信号,海上通信主要依靠卫星通信、单边带短波电台(SSB)和甚高频通信(VHF)且海上卫星通信设备投入和使用成本高昂,SSB和VHF 主要用于语音传输,数据传输速率过低。
近年来我国海洋运输、船运贸易、海洋资源开发等经济活动蓬勃发展,海上应急搜救、港口生产调度、船舶导助航等业务对海上网络通信服务提出了新的需求,互联网、大数据、云计算、人工智能和区块链等新一代信息技术必将推动整个航运业进入网络化发展的新时代。
在这样的背景下,厦门通信中心利用基于长距离WiFi技术的宽带通信系统进行船岸之间的数据传输测试,通过测试获得第一手资料,探索适合我国国情的高速率、高可靠、全覆盖、低成本的海上宽带高速通信网络。
2.常技术分析船岸高速数据通信需要考虑到足够的传输距离、较高的数据传输速率、船舶移动特性、多用户等因素,目前为实现船岸之间的数据通信常用的技术手段如下:(1)VHF频段,主要有VEDS系统,该系统包含岸基和天基(卫星)系统,可以实现非常大的覆盖方位,但是该系统数据传输速率较低,目前测试情况来看,只能实现300K左右的传输速度。
大型船舶尺寸和吃水深度数据信息
型 宽B 12.6 14.1 16.4 19.5 22 27.4 36.6 36.7
41.6 47.2
型 深H 6.2 7.3 8.3 11.8 13.9 18 21.5 22.8
27.5 27.5
船舶吨级
GT 1000(1000~1500) 2000(1501~2500) 3000(2501~4500) 5000(4501~7500) 10000(7501~12500) 20000(12501~27500) 30000(27501~45000) 50000(45001~65000) 80000(65001~85000)
船舶吨级 DWT(t) 1000(1000~1500) 2000(1501~2500) 3000(2501~4500) 5000(4501~7500) 10000(7501~12500) 20000(12501~27500)
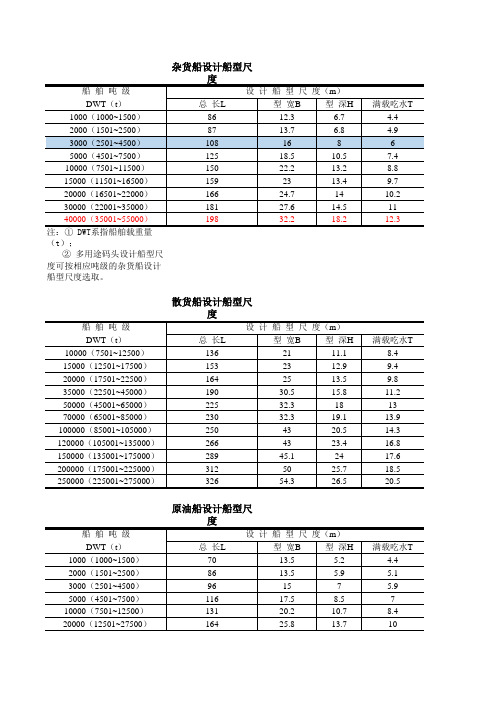
原油船设计船型尺 度
设 计 船 型 尺 度(m)
总 长L
型 宽B
型 深H
70
散货船设计船型尺 度
设 计 船 型 尺 度(m)
总 长L
型 宽B
型 深H
136
21
11.1
153
23
12.9
164
25
13.5
190
30.5
15.8
225
32.3
18
230
32.3
19.1
250
43
20.5
266
43
23.4
289
45.1
24
312
50
25.7
326
54.3
26.5
满载吃水T 8.4 9.4 9.8 11.2 13 13.9 14.3 16.8 17.6 18.5 20.5
船舶设计常用软件

我国年造船产量占世界造船总产量的份额和名次已由世界第17位跃居世界第3位,仅次于日本和韩国。
预计到2005年,中国年造船产量可迄650万吨以上,在世界造船市场的份额也将提高到15%。
但目前,我国整体造船水平大致相当于国际二十世纪80年代末、90年代初的水平,船型开发与设计满足不了开拓市场的需求。
不少技术复杂的船,包括超大型集装箱船、大型液化石油气、天然气船、豪华旅游船等尚处于开发阶段。
工欲善其事,必先利其器。
随着船舶不断向大型化、复杂化方向发展,利用先进的计算机技术,提高设计水平,缩短设计周期,设计出经济、高附加值的船舶已相当普及。
目前,国际上常用的船舶设计软件有如下几种:TribonTribon系统是由瑞典KCS(Kockums Computer System AB)公司设计开发的一套用于辅助船舶设计与建造计算机软件集成系统。
Tribon集CAD/CAM(计算机辅助设计与制造)与MIS (信息集成)于一体,并覆盖了船体、管子、电缆、舱室、涂装等各个专业的一个专家系统。
总体上Tribon系统可分为船体设计、舾装设计、系统管理及维护三大部分。
该软件是一个出色的集成系统,也是一个庞大的系统(系统程序约500 MB),它具有许多其他系统所不具备的优点。
Tribon推出的新版本较过去添加了很多新的功能,如在设备选择、合同设计等方面的功能。
我国使用该设计软件系统的公司有:广船国际股份有限公司、江南造船(集团)有限公司等。
对我国的用户来说,该软件存在的缺点有:数据开放性不够,数据库系统自成一套与常用的数据库缺少接口等。
NAPANAPA公司首次在船舶设计软件中采用3D技术,并在船舶初步设计和基本设计阶段提出了3D NAPA船舶模型的概念,这一概念己得到广泛认同。
利用NAPA Steel设计师们可以在较短时间内迅速完成结构初步设计和重量、成本计算,生成可供送审的技术文件和图样,并根据需要生成结构有限元计算所需的网格模型。