有限元第3章-杆件结构的有限元法_虚功原理
第三章 杆系有限元

单元应力: E EBd 下面应用弹性体虚功原理导出单元刚度方程。
等截面杆单元
虚位移原理
弹性体受力平衡时,若发生虚位移,则外力虚功等于弹
性体内的虚应变能。——平衡条件
对于杆单元,定义虚位移如下: ui 节点虚位移: d u j 单元虚位移: u Nd
3)单元刚度矩阵对称、奇异、主对角元素恒正。
等截面杆单元
(四)举例 例1:求图示2段杆中的应力。
解:系统分为2个杆单元,单元之间在节点2连接。
单元刚度矩阵分别为:
等截面杆单元
(四)举例 例:求图示2段杆中的应力。
解:系统分为2个杆单元,单元之间在节点2连接。
单元刚度矩阵分别为:
等截面杆单元
参考弹簧系统的方法,装配系统的有限元方程(平衡方程):
1 一个弹簧单元 的分析 2 弹簧系统
什么是单元特性? 弹簧单元的刚度矩阵 弹簧单元的刚度方程 弹簧单元刚度矩阵的特点
弹簧系统的总刚度矩阵 如何求解系统的平衡方程
弹簧单元分析
弹簧是宏观力学特性最简单的弹性元件。下面以平衡弹簧系
统中一个弹簧单元为研究对象进行分析。
2个节点:
i, j
fi , f j
很多工程结构由 杆件组成,这类 结构的设计往往 需要进行有限元 分析。
常见的杆系结构
弹簧
○ ○ ○
○
○
○
○
○
○
梁 拱 刚架
桁架
○ ○ ○ ○ ○
3.1 引言
3.2 弹簧单元和弹簧系统 3.3 杆单元和平面桁架 3.4 梁单元和平面刚架 3.5 刚架分析实例 3.6 ANSYS分析实例
弹簧单元和弹簧系统
注意:总刚度矩阵 就是单元刚度矩阵 扩大后的叠加!
有限元虚功原理
但是必须指出,无论是虚位移原理还是虚应力原 理,他们所依赖的几何方程和平衡方程都是基于 小变形理论的,所以他们不能直接应用于基于大 变形理论的力学问题。
3.3虚功原理(平衡方程和几何方程的等效积分 “弱”形式)
变形体的虚功原理:变形体中任意满足平衡的 力系在任意满足协调条件的变形状态上作的虚 功等于零,即体系外力的虚功与内力的虚功之 和等于零。 虚功原理是虚位移原理和虚应力原理的总称。 他们都可以认为是与某些控制方程相等效的积 分“弱”形式。
虚位移原理
虚位移原理是平衡方程和力的边界条件的等效积分的“弱” 形式;虚位移原理的力学意义:如果力系是平衡的,则它 们在虚位移和虚应变上所作的功的总和为零。反之,如果 力系在虚位移(及虚应变)上所作的功的和等于零,则它 们一定满足平衡方程。所以,虚位移原理表述了力系平衡 的必要而充分条件。 一般而言,虚位移原理不仅可以适用于线弹性问题,而且 可以用于非线性弹性及弹塑性等非线性问题。
?但是必须指出无论是虚位移原理还是虚应力原理他们所依赖的几何方程和平衡方程都是基于小变形理论的小变形理论的所以他们不能直接应用于基于大所以他们不能直接应用于基于大变形理论的力学问题
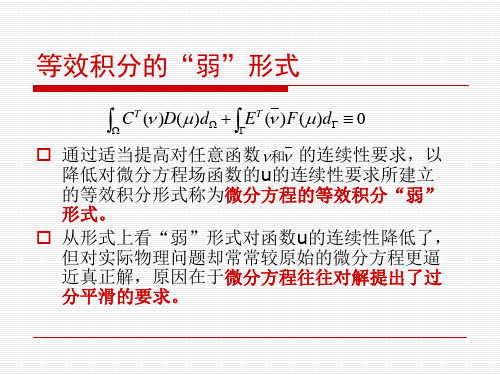
等效积分的“弱”形式
C T ( )D( )d E T ( ) F ( )d 0
通过适当提高对任意函数 和 的连续性要求,以 降低对微分方程场函数的u的连续性要求所建立 的等效积分形式称为微分方程的等效积分“弱” 形式。 从形式上看“弱”形式对函数u的连续性降低了, 但对实际物理问题却常常较原始的微分方程更逼 近真正解,原因在于微分方程往往对解提出了过 分平滑的要求。
但是否适用所有的问题呢?
虚应力原理
虚应力原理是几何方程和位移边界条件的等效积分“弱” 形式。虚应力原理的力学意义:如果位移是协调的(即 在内部连续可导),则虚应力和虚边界约束反力在他们 上面所作的功的总和为零。反之,如果上述虚力系在他 们上面所作的功的和为零,则它们一定是满足协调的。 所以,虚应力原理表述了位移协调的必要而充分条件。 虚应力原理可以应用于线弹性以及非线性弹性等不同的 力学问题。
有限元虚功原理

但是必须指出,无论是虚位移原理还是虚应力原 理,他们所依赖的几何方程和平衡方程都是基于 小变形理论的,所以他们不能直接应用于基于大 变形理论的力学问题。
虚位移原理是平衡方程和力的边界条件的等效积分的“弱” 形式;虚位移原理的力学意义:如果力系是平衡的,则它 们在虚位移和虚应变上所作的功的总和为零。反之,如果 力系在虚位移(及虚应变)上所作的功的和等于零,则它 们一定满足平衡方程。所以,虚位移原理表述了力系平衡 的必要而充分条件。
一般而言,虚位移原理不仅可以适用于线弹性问题,而且 可以用于非线性弹性及弹塑性等非线性问题。
3.3虚功原理(平衡方程和几何方程的等效积分 “弱”形式)
变形体的虚功原理:变形体中任意满足平衡的 力系在任意满足协调条件的变形状态上作的虚 功等于零,即体系外力的虚功与内力的虚功之 和等于零。
虚功原理是虚位移原理和虚应力原理的总称。 他们都可以认为是与某些控制方程相等效的积呢?
虚应力原理
虚应力原理是几何方程和位移边界条件的等效积分“弱” 形式。虚应力原理的力学意义:如果位移是协调的(即 在内部连续可导),则虚应力和虚边界约束反力在他们 上面所作的功的总和为零。反之,如果上述虚力系在他 们上面所作的功的和为零,则它们一定是满足协调的。 所以,虚应力原理表述了位移协调的必要而充分条件。
有限元分析与应用 第3讲、杆梁问题的有限单元法
计算简图:
在结构分析当中用来代替实际结构的计算模型(图形)
确定计算简图的原则: 简化内容:
1.能反映实际结构的主要力学特性; 2.分析计算尽可能简便 杆件 杆件的轴线 刚结点 铰结点 半铰结点(组合结点) 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座) 空间结构 平面结构 集中力、集中力偶、分布荷载
6 EI y l
2
单元刚度矩阵第三列的其他元素为0。
⑷ xi 1 ,其他结点位移为0(图3-5),生成第四列 元素。
图3-5
为杆件的扭转基本变形情况,由材料力学公式有
k 4, 4 GJ M xi l k10, 4 GJ M xj l
单元刚度矩阵第四列的其他元素为0。
⑸ yi 1 ,其他结点位移为0(图3-6),生成第五列 元素。
j结点各自由度分别出现单位位移而生成的单元刚度矩阵元素 的分析类似,最后得至空间梁单元的单元刚度矩阵为
EA l 0 0 0 0 0 EA l 0 0 0 0 0 12EI z l3 0 0 0 6 EI z l2 0 12EI z l3 0 0 0 6 EI z l2 12EI y l3 0 6 EI y l2 0 0 0 12EI y l3 0 6 EI y l2 0 GJ l 0 0 0 0 0 GJ l 0 0 4 EI y l 0 0 0 6 EI y l2 0 2 EI y l 0 4 EI z l 0 6 EI z l2 0 0 0 2 EI z l EA l 0 0 0 0 0 12EI z l3 0 0 0 6 EI 2z l 12EI y l3 0 6 EI y l2 0 GJ l 0 0 4 EI y l 0 称 对
结构力学第三章-虚功原理

例. 求 A 端支座发生竖向位移 c 时引起C点的竖向位移 .
2)虚功原理用于虚设的平衡力状态与实际的协调位移状态之间。
解:首先构造出相应的虚设力状态。即,在拟求位移之点(C点)沿拟求位移方向(竖向)设置单位荷载。
A
B
a
C
b
c
1
A
B
C
由 求得:
解得:
这是单位荷载法 (Dummy-Unit Load Method) 它是 Maxwell, 1864和Mohr, 1874提出,故也称为 Maxwell-Mohr Method
(2)刚体系的虚位移原理
去掉约束而代以相应的反力,该反力便可看成外力。则有:刚体系处于平衡的必要和充分条件是:
对于任何可能的虚位移,作用于刚体系的所有外力所做虚功之和为零。
P
Δ
2Δ
3Δ/2
原理的表述: 任何一个处于平衡状态的变形体,当 发生任意一个虚位移时,变形体所受外力 在虚位移上所作的总虚功δWe,恒等于变 形体各微段外力在微段变形位移上作的虚 功之和δWi。也即恒有如下虚功方程成立
2. 原理的证明表明:原理适用于任何 (线性和非线性)的 变形体,适用于任何结构。
3. 原理可有两种应用: 实际待分析的平衡力状态,虚设的协调位移状态, 将平衡问题化为几何问题来求解。 实际待分析的协调位移状态,虚设的平衡力状态, 将位移分析化为平衡问题来求解。
δWi 的计算:
δWi =Σ∫[Nδε+Qδγ+Mδθ]ds
解:去掉A端约束并代以反力 X,构造相应的虚位移状态.
A
B
P
X
P
(c)
直线
待分析平衡的力状态
虚设协调的位移状态
杆件结构的有限元法

F1 k11 k12 u1 u F k k 2 21 22 2
杆件结构的有限元法—单个弹簧
单个弹簧的力—位移关系
F1 k F2 k
k u1 k u2
弹簧的节点力向量和节点位移向量
F
F1 F 2
u
u1 u 2
1
2012/5/24
杆件结构的有限元法—单个弹簧
单个弹簧力的刚度(矩阵形式表示)
1 2
k11 k12 k 21 k22
1
2
单个弹簧力和位移关系(矩阵形式)
2012/5/24
杆件结构的有限元法
杆件结构的有限元法
单个弹簧的刚度矩阵 组合弹簧的刚度矩阵 铰支杆系的有限元计算格式 单元坐标系统(局部坐标系)、整体坐标系 刚度、单元刚度矩阵、整体刚度矩阵 自由度
基本概念
杆件结构的有限元法—单个弹簧
单个弹簧力和位移关系(线弹性)
F k
已知力和位移 未知力和位移
F1 K11 X 1 K12 X 2 F2 K 21 X 1 K 22 X 2 X 2 K 22 1 F2 K 21 X 1
4
2012/5/24
杆件结构的有限元法—杆件刚度矩阵
杆件结构的单元划分、节点定义
节点定义 单元划分 节点力和位移
杆件结构的有限元法—杆件刚度矩阵
杆件的力与变形关系
等效刚度
F
A E u L
杆结构 分析的有限元方法(有限元)
杆单元形状函数
杆单元刚度矩阵
平面问题中的坐标变换
梁结构分析的有限元方法
梁:承受横向荷载和弯矩的杆件。
梁的主要变形为挠度v
横截面变形前后都垂直于杆变形前的轴线x轴
中性层变形=0
纯弯曲没有剪力,只有弯矩
梁截面的惯性矩
杆结构分析的有限元方法
杆:承受轴向荷载的杆件
最基本的承力结构件:杆、梁
弹簧--简单的承受轴力的结构件
有限元方法中,每一个处理步骤都是标准化和规范化的,
因而可以在计算机上通过编程来自动实现。
F=kδ
k--刚性系数
位移的绝对变化量/杆件的伸长量δ=u2—u1
应力某截面上单位面积上的内力/内力的分布集度
应变相对伸长量单位长度的伸长量
杆单元的特性是节点位移及节点力的方向都是沿轴线方向。
杆结构的力学分析
铰接的杆结构----杆只受轴力-----杆件拉伸问题---可自然离散
两端为铰接的杆件只承受轴力。
各个单元研究(基于局部坐标系的表达)
各个单元研究
离散单元的集合、组装
杆单元及坐标变换
自由度:描述物体位置状态的每个独立变量。
对于杆单元,其节点位移有两个自由度。
有限元分析与ANSYS实践第3章
2019/2/19
a)
b)
c)
图3-1 杆件结构实例 2019/2/19
在有限元分析中,当杆件的长度尺寸远大于截面尺寸时, 可认为杆件单元只发生轴线方向的拉伸与压缩变形,不产生 弯曲、扭转等变形。如图3-2所示,作用于杆件两端方向相 反的两个外力,其作用线与杆件轴线重合,使杆件发生拉伸 (虚框)。
单元首结点 编号 1 2 1
单元尾结点 编号 2 3 3
单元长度 /cm 70.71 70.71 100
(2)单元分析 在各单元上,沿杆的轴向建立笛卡尔(直角)坐标系,称为 单元(或局部)坐标系。 1) 对水平杆单元3,假设其受力与位移情况如图3-5所示。在 单元坐标系x轴向右的外力fix和fjx的共同作用下,结点i位移了 uix,结点j位移了ujx。
图3-24a) 活动绞支座
(2)施加载荷
(3)计算求解
图3-28 求解窗口
4. 后处理 (1)定义单元表
(2)输出单元表
图3-31 输出单元表
3.2自重作用下均匀截面直杆的有限元法分析
由于结构体自身存在质量,所以在实际工程中,除考虑外 力作用的同时,应首先了解结构体自身重量所产生力学问 题。本节介绍自重作用下均匀截面直杆的有限元法分析一 般原理和ANSYS分析方法。
例 3-1 设平面三角结构 的桁架 123 如图 3-4 所示。 已知:各杆的弹性模量 E=2.0×105MPa,各杆截面 均为 A=0.5cm 2 ,杆 13 长为 100cm,载荷P=2KN,试求 平面桁架的内力和位移。
图3-4 平面桁架123
解:1.传统分析方法 设杆12、杆23和杆13的内力分别为N1、N2和N3。 在总体坐标系x-y(或U-V)中,由力的平衡方程可 以得到结点的内力值。
第3章 有限元分析的数学求解原理-三大步骤
U x x y y z z xy xy yz yz zx zx dV
X u Y v Z w dV X u Y v Z w d W
V V
用 * 表示;引起的虚 应变分量用 * 表示
j Vj
Ui
i Vi
0 X
y
¼ 1-9 Í
ui* * vi wi* * * u j , v* j w*j
x* * y * z * * xy *yz * 18 zx
19
7.间接解法:最小势能原理
20
最小势能原理
W U 0
最小势能原理就是说当一个体系的势能最小时,系统会处于稳定 平衡状态。或者说在所有几何可能位移中,真实位移使得总势能取最小值
0 表明在满足位移边界条件的所有可能位移 最小势能原理: 中,实际发生的位移使弹性体的势能最小。即对于稳定平衡状态,实 际发生的位移使弹性体总势能取极小值。显然,最小势能原理与虚功 原理完全等价。 n m
虚功原理的矩阵表示
在虚位移发生时,外力在虚位移上的虚功是:
* 式中
U i u i* V i v i* W i w i* U j u *j V j v *j W j w *j
* 是 的转置矩阵。
T
*
F
T
同样,在虚位移发生时,在弹性体单位体积内,应力在虚应变上的虚 功是: * * * * * * * T x x y y z z xy xy yz yz zx zx
27
⑴解析法
虚功原理 有限元
虚功原理有限元虚功原理是力学中的一个基本原理,它是运用能量守恒原理和虚位移原理进行问题求解的一种方法。
虚功原理的应用十分广泛,特别是在有限元方法中,它是解答复杂结构力学问题的一种常用手段。
虚功原理的基本原理是:在刚体或弹性体的力学问题中,力系对于结构的作用机理可以使用能量方法来描述,即外力对物体所做的功等于内力弹性势能的变化。
在有限元方法中,虚功原理的应用可以被概括为以下几个步骤:1. 确定系统的弹性势能表达式:根据材料力学性质和结构几何形状,建立并表达出结构的弹性势能。
2. 设定虚位移场:在结构的静力平衡方程中,引入一组满足边界条件的虚位移场,并将结构的位移表示为真实位移与虚位移的叠加。
虚位移场是一个理想化的假设,它用于引导计算的进行。
3. 计算虚功:将虚位移场代入弹性势能表达式中,得到每个单元的虚功。
4. 构造系统的刚度方程:根据虚功原理,对每一个虚位移方向进行变分,得到相应的虚功。
将这些虚功累加起来,并考虑结构边界条件和约束条件,得到整个系统的刚度方程。
5. 解刚度方程:使用适当的数值方法(如矩阵求解方法)求解刚度方程组,得到结构的位移响应。
6. 计算应力和应变分布:利用位移响应,通过一定的插值方法,计算出结构各点的应力和应变分布。
有限元方法利用虚功原理的优点在于,它可以解决复杂结构的力学问题,并且可以处理非线性材料、大变形和大变位等情况。
虚功原理的运用使得有限元方法成为求解工程结构问题的一种强大工具。
需要注意的是,在使用虚功原理时,应注意选择合适的虚位移场,并保证其满足结构的边界条件和约束条件;同时,还需要进行适当的数值技巧处理,如选择合适的数值积分方法和数值求解方法,以提高计算的精确性和效率。
总结来说,虚功原理是有限元方法求解问题的基础,它通过能量守恒原理和虚位移原理,将原问题转化为求解刚度方程的问题,从而得到结构的位移响应和应力应变分布。
虚功原理在结构力学中的应用是十分重要和广泛的,它为工程问题的解答提供了有效的途径。