连铸机扇形段远程自动调节辊缝的液压系统及其控制方案的分析
《首秦2#连铸机动态软压下扇形段标定系统的研究与改造》范文
《首秦2#连铸机动态软压下扇形段标定系统的研究与改造》篇一一、引言随着现代工业技术的不断发展,连铸机作为钢铁生产中的重要设备,其性能的稳定性和效率直接影响到钢铁企业的生产效益。
首秦2连铸机作为企业重要的生产设备之一,其动态软压下扇形段标定系统的性能优化与改造显得尤为重要。
本文将针对首秦2连铸机动态软压下扇形段标定系统进行研究与改造,以提高其工作效率和稳定性。
二、首秦2连铸机现状分析首秦2连铸机目前使用的动态软压下扇形段标定系统,在一定程度上满足了生产需求,但在实际运行过程中仍存在一些问题。
首先,系统的标定精度有待提高,以适应不同钢种和工艺要求。
其次,系统的稳定性有待加强,以减少故障率和维护成本。
此外,随着生产规模的扩大和工艺要求的提高,原有系统的性能已无法满足现代生产需求。
三、动态软压下扇形段标定系统原理及问题分析动态软压下扇形段标定系统是连铸机的重要组成部分,其主要功能是对铸坯进行动态软压下,以改善铸坯的内部组织和表面质量。
然而,在实际运行过程中,该系统存在以下问题:1. 标定精度不高:由于系统对铸坯的压下量控制不够精确,导致铸坯的尺寸和形状难以满足工艺要求。
2. 稳定性差:系统在运行过程中易受外界干扰,导致压下量波动较大,影响铸坯的质量。
3. 维护成本高:由于系统结构复杂,维护难度大,导致维护成本较高。
四、改造方案及实施针对《首秦2#连铸机动态软压下扇形段标定系统的研究与改造》篇二一、引言在现代化钢铁企业的生产流程中,连铸机作为关键的冶炼设备之一,其运行效率及产品质量的稳定性对企业的生产效益有着决定性的影响。
首秦2连铸机作为企业重要的生产设备,其动态软压下扇形段标定系统的性能直接关系到铸坯的质量和生产的连续性。
因此,对首秦2连铸机动态软压下扇形段标定系统的研究与改造具有重要的现实意义。
二、当前连铸机动态软压下扇形段标定系统的问题当前,首秦2连铸机动态软压下扇形段标定系统存在一些问题,如标定精度不高、系统响应速度慢、维护成本高等。
连铸二级扇形段智能控制系统
第38卷2020年第1期(总第205期)
连铸二级扇形段智能控制系统
使用与维护
王国强 (鞍钢股份皱鱼圈钢铁分公司炼钢部 营口 115007)
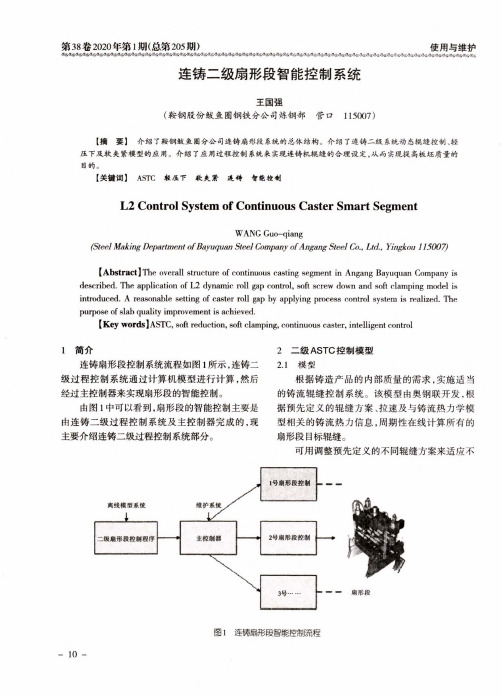
【摘 要】 介绍了轶钢皱鱼圈分公司连铸扇形段系统的总体结构。介绍了连铸二级系统动态棍缝控制、轻 压下及软夹紧模型的应用。介绍了应用过程控制系统来实现连铸机棍缝的合理设定,从而实现提高板坯质量的 目的。
在采用液压调整的扇形段的情况下,成功尝 试动态辐缝模式下的软压下应用是可能的,铸流 的固化动态过程如图4所示。
铸流长度/m
图5热流跟踪
每个扇形段的软夹紧模式被ASTC在线系统 所设定并控制,因为只有在线系统知道铸坯的中 心温度轮廓。
3在线应用 在鞍钢陵鱼圈连铸二级系统中,HMI辐缝值
的实时变化如图6所示。在一般浇铸过程中,开浇 前引锭杆插入过程中使用静态辗缝引锭杆模式, 开浇后,执行动态辐缝模式。每一个扇形段的设 定信息与实际信息都能从HMI图中得到。
由图1中可以看到,扇形段的智能控制主要是 由连铸二级过程控制系统及主控制器完成的.现 主要介绍连铸二级过程控制系统部分 。
2二级ASTC控制模型 2.1模型
根据铸造产品的内部质量的需求,实施适当 的铸流辐缝控制系统。该模型由奥钢联开发,根 据预先定义的辐缝方案、拉速及与铸流热力学模 型相关的铸流热力信息,周期性在线计算所有的 扇形段目标辑缝。
动态模式的运行依赖于二冷水的运行模式, 只有二冷水为动态二冷水时,辐缝执行动态模式, 否则执行静态辗缝。
有时还需要必要的HMI操作数据。 输出量包含设定点和附加信息。设定点包
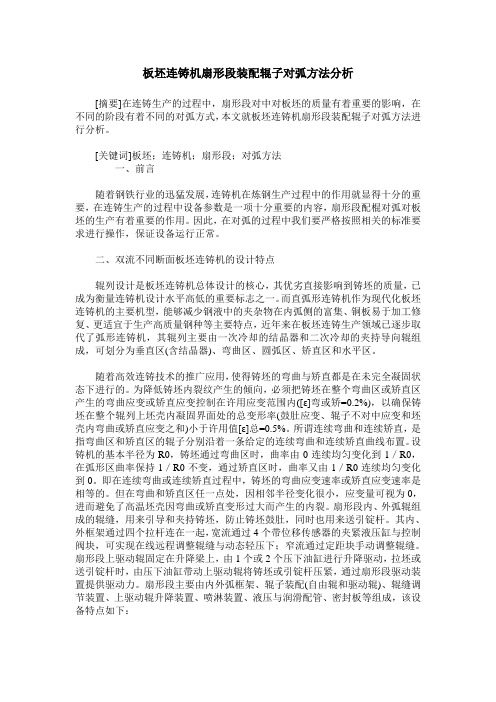
板坯连铸机板坯连铸机液压系统系统..

M B4
T
P
20× 3
a
ab
P1 T1 L1
马达离合器动作 (带压啮合)
大包液压马达事故驱动 0.05M Pa
L
A1
B1
制动盘 (带 压制动)
释放
制动
12 ×2
制动
12 ×2
释放
大包 回转 台 机上 配 管
16×2 16×2
1 6×2
20X 3 20X 3
1 6×2
车 间配 管
阀台区
MA1 A1 B1 MB1
弧形扇形段由固定辊子的上下框架、辊子,连接上下 框架的液压缸,扇形段定位固定装置,气水自动连通 装置等组成。辊缝调节由分布在四个角的液压缸实现, 四个液压缸将上下框架连接起来,并使扇形段夹紧, 传动辊布置在中间并由液压缸压下;所有扇形段均采 用径向更换方式。
压下缸压力: 3-18MPa 扇形段1∼6 压下缸: Φ125/Φ90-140 (XJS06BBE125/720-80HD-B10) 压
为保持钢水温度,回转台设有钢包加盖装置。钢包加盖 装置设置在钢包回转台升降臂上,由两个可独立旋转和升降 的悬臂组成,旋转可由液压马达或液压缸驱动,升降由液压 缸驱动。
L2d1a Pbd1a T2d1a φ 18X3 φ 28X3
φ18x3 φ18x3 φ18x3 φ18x3
钢包升降(臂1)
L A DL E TU RR ET LI FT IN G / A RM 1
油 口连接尺 寸:G1/4
阀台 中间配管 结晶器上配管
φ16x2
最小报警压力 10MPa
SPAHM:
4 .1
SPALM:
-F001
6
5
4.2 Am 1
板坯连铸机扇形段装配辊子对弧方法分析
板坯连铸机扇形段装配辊子对弧方法分析[摘要]在连铸生产的过程中,扇形段对中对板坯的质量有着重要的影响,在不同的阶段有着不同的对弧方式,本文就板坯连铸机扇形段装配辊子对弧方法进行分析。
[关键词]板坯;连铸机;扇形段;对弧方法一、前言随着钢铁行业的迅猛发展,连铸机在炼钢生产过程中的作用就显得十分的重要,在连铸生产的过程中设备参数是一项十分重要的内容,扇形段配棍对弧对板坯的生产有着重要的作用。
因此,在对弧的过程中我们要严格按照相关的标准要求进行操作,保证设备运行正常。
二、双流不同断面板坯连铸机的设计特点辊列设计是板坯连铸机总体设计的核心,其优劣直接影响到铸坯的质量,已成为衡量连铸机设计水平高低的重要标志之一。
而直弧形连铸机作为现代化板坯连铸机的主要机型,能够减少钢液中的夹杂物在内弧侧的富集、铜板易于加工修复、更适宜于生产高质量钢种等主要特点,近年来在板坯连铸生产领域已逐步取代了弧形连铸机,其辊列主要由一次冷却的结晶器和二次冷却的夹持导向辊组成,可划分为垂直区(含结晶器)、弯曲区、圆弧区、矫直区和水平区。
随着高效连铸技术的推广应用,使得铸坯的弯曲与矫直都是在未完全凝固状态下进行的。
为降低铸坯内裂纹产生的倾向,必须把铸坯在整个弯曲区或矫直区产生的弯曲应变或矫直应变控制在许用应变范围内([ε]弯或矫=0.2%),以确保铸坯在整个辊列上坯壳内凝固界面处的总变形率(鼓肚应变、辊子不对中应变和坯壳内弯曲或矫直应变之和)小于许用值[ε]总=0.5%。
所谓连续弯曲和连续矫直,是指弯曲区和矫直区的辊子分别沿着一条给定的连续弯曲和连续矫直曲线布置。
设铸机的基本半径为R0,铸坯通过弯曲区时,曲率由0连续均匀变化到1/R0,在弧形区曲率保持1/R0不变,通过矫直区时,曲率又由1/R0连续均匀变化到0。
即在连续弯曲或连续矫直过程中,铸坯的弯曲应变速率或矫直应变速率是相等的。
但在弯曲和矫直区任一点处,因相邻半径变化很小,应变量可视为0,进而避免了高温坯壳因弯曲或矫直变形过大而产生的内裂。
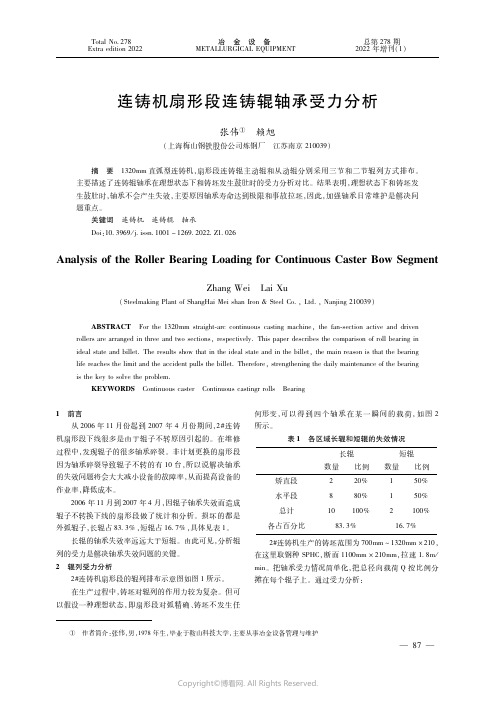
连铸机扇形段连铸辊轴承受力分析
① 作者简介:张伟,男,1978年生,毕业于鞍山科技大学,主要从事冶金设备管理与维护
— 87—
Copyright©博看网. All Rights Reserved.
总第 278期 冶 金 设 备
2022年增刊(1)
关键词 连铸机 连铸辊 轴承 Doi:103969/jissn1001-12692022Z1026
AnalysisoftheRollerBearingLoadingforContinuousCasterBow Segment
ZhangWei LaiXu
(SteelmakingPlantofShangHaiMeishanIron& SteelCo.,Ltd.,Nanjing210039)
'
图 5 发生最大鼓肚时铸坯对三分节辊辊列的 作用力示意图
当发生最大鼓肚时,通过受力分析可以得到: F1 =0%Q; F2 =50%Q; F3 =50%Q; F4 =0%Q; 在这里也取第七排辊的总径向载荷,可以得到扇形段 6段的第四排辊的轴承的最大总径向载荷 F2 =50%Q =24196×50% =121kN;
ETxtortaaleNdioti.o2n782022 ME TA L冶LU RG金IC A设L EQ备UIPMENT 2 02总2第年增278刊期(1)
连铸机扇形段连铸辊轴承受力分析
张伟① 赖旭
(上海梅山钢铁股份公司炼钢厂 江苏南京 210039)
摘 要 1320mm直弧型连铸机,扇形段连铸辊主动辊和从动辊分别采用三节和二节辊列方式排布。 主要描述了连铸辊轴承在理想状态下和铸坯发生鼓肚时的受力分析对比。结果表明,理想状态下和铸坯发 生鼓肚时,轴承不会产生失效,主要原因轴承寿命达到极限和事故拉坯,因此,加强轴承日常维护是解决问 题重点。
影响大板坯连铸机扇形段寿命的原因分析及对策

影响大板坯连铸机扇形段寿命的原因分析及对策摘要:为了提高扇形段在线使用寿命,提高连铸机功能精度和产品质量,通过分析影响大板坯连铸机使用寿命的原因,例如扇形段驱动辊开口度变大、扇形段驱动辊限位螺栓切断、扇形段辊缝超差大等问题,并通过一系列的优化改进解决了上述问题,结果表明:影响连铸机使用寿命的原因很多,只要找出主要关键原因并解决,就能很好地提高连铸机的使用寿命,提高铸坯的质量。
关键词:连铸机;开口度;3D通讯线缆;寿命1前言某厂有2台2机2流直弧形多点弯曲多点矫直板坯连铸机,铸坯厚度200mm,预留180mm。
铸坯宽度900-1650mm,共有11个扇形段,1-7为弯曲矫直段,8到11为水平段,设计年生产能力300万吨,设计单位西重所冶金长度25m 设计拉速0.9-1.25m/min。
采用结晶器液面自动控制、结晶器、扇形段远程自动辊缝调节、喷嘴3D自动调节、动态二冷配水以及动态轻压下等国际先进技术,充分实现高效、可靠生产高品质特厚板坯。
连铸机的功能精度保持和设备的稳定性直接影响到产品产量和质量,通过多年的扇形段维护,发现影响扇形段下线原因有很多种,可以通过原因分析,设备优化改进,以提高扇形段功能精度和设备稳定性,为此本文针对大板坯连铸机扇形段工作原理进行了较系统的研究,对其存在的开口度、万向联轴器等问题进行了优化改进,确保了该公司铸机的正常运行,延长扇形段在线使用时间。
2扇形段开口度超差的原因分析2.1它是影响钢坯质量的关键参数之一。
在扇形截面的制备过程中,通过调整辊缝值来实现扇形截面的开度。
造成这种差异的主要原因有:(1)在风机段计数器上测量风机段轧辊间隙值时,处于水平状态。
上线后,在非水平状态下会出现下翘现象,使上线辊缝值与离线预制辊缝值一致值出现偏差;(2)扇形内外框拉拔钢受热应力影响并产生变形;(3)三段辊的表面磨损使开度发生变化;(4)三段滚子轴承使用一段时间后,间隙增大,开度变化;(5)三段辊的表面积、炉渣和水垢影响严重开环的准确;(6)三段辊加热冷却不均匀,导致柔性变形,影响开孔精度。
液压电磁换向阀在连铸机扇形段位置控制中的应用

2014年第11期 (总第290期) 悯鸯 NO.11.2014 (CumulativetyNO
.290)
液压电磁换向阀在连铸机扇形段位置控制中的应用 恽华伟 (南京钢铁股份有限公司中厚板卷厂,江苏南京210035)
摘要:扇形段是连铸机的核心设备,现在的扇形段都设计成智能扇形段,要求对辊缝进行精准控制,以提升连 铸坯质量。采用液压电磁换向阀与电气控制相结合的方式,实现精确的位置控制,降低了液压系统的成本。 关键词:扇形段控制;电磁换向阀;位置控制 中图分类号:TP27 3 文献标识码:A 文章编号:1 009-2 374(2014)11-0009—02
从2002年起南京钢铁股份有限公司先后从奥钢联引 进了三台板坯连铸机,均采用液压电气控制方式实现连 铸机扇形段远程自动辊缝调节的新技术,这一技术的成 功应用也使得连铸机具备动态软压下的功能,提高了连 铸坯的内部质量。带液压自动辊缝调节的扇形段能够实 现快速的辊缝调节、减少员工的劳动强度,这对提高连 铸机自动化水平、提升铸坯质量起到了显著作用。奥钢 联公司的扇形段远程自动辊缝调节技术与其它几家著名 的连铸机设计供货商有所不同,在液压系统的设计放弃 了传统的比例阀或伺服阀进行精准的位置控制,采用了 成本更低、维护方便的电磁换向阀与电气控制相结合的 方式,实现精确的位置控制。 l扇形段位置控制的要求 图1 连铸机扇形段起着支撑和导向铸坯的作用,是在铸 坯凝固过程中直接与之接触的设备,对铸坯表面质量 和内部质量有很大的影响,是连铸机的核心设备。现在 的扇形段都设计成智能扇形段,要求对辊缝进行精准控 制,以提升连铸坯质量。每台扇形段有四台夹紧液压 缸,每台夹紧油缸安装有一个位移传感器。液压缸的活 塞杆与扇形段的下框架相连,固定不动;液压缸缸体 与扇形段上框架相连带动上框架及其辊组作(如图l所 示)。根据连铸工艺浇注参数,铸机二级辊缝模型自动 计算出每台油缸位置设定值给扇形段控制器,扇形段控 制器对每台油缸单独进行位置控制,同时要保证4个油 缸基本同步,油缸运行速度控制在1.2mm/sec,位置控 制精度达到了±0.1mm。
大板坯连铸液压扇形段调整参数评价及优化的开题报告

大板坯连铸液压扇形段调整参数评价及优化的开题
报告
本篇开题报告旨在提出一项研究,探讨大板坯连铸液压扇形段调整参数评价及优化的问题。
在钢铁生产中,连铸是一种非常重要的工艺,它对于冶金行业的发展具有很大的推动作用。
然而,连铸过程中存在很多的问题,如液相区不稳定、板坯结构不均等等,这些问题直接影响了板坯的质量,因此,需要对连铸过程进行优化。
在连铸过程中,扇形段的调整参数对于板坯质量有着非常重要的影响。
本项目将以大板坯连铸为研究对象,通过实验和数值模拟相结合的方法,研究不同扇形段调整参数对于板坯质量的影响,并进一步优化参数,以提高板坯的质量。
具体研究内容可分为以下几点:
1. 实验设计:首先,在连铸过程中设置不同的扇形段调整参数,如压力、流量等,同时采集板坯的相关数据,如结晶器压力、结晶器超高度等。
2. 数据分析:通过实验数据分析,研究扇形段调整参数对于板坯质量的影响,如表面质量、板坯内部缺陷等。
3. 数值模拟:采用数值模拟的方法,对连铸过程进行模拟,得出不同扇形段调整参数对于板坯质量的影响结果。
4. 优化方案:基于实验结果和数值模拟结果,对扇形段的调整参数进行优化,提高板坯的质量和连铸效率。
本研究旨在提高大板坯连铸质量,优化生产过程,减少生产成本,同时提高钢铁企业的竞争力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
・专题综述・收稿日期:2006-02-23;修订日期:2006-04-11
作者简介:谷振云(1940-),男,西安重型机械研究所研究员级高级工程师。
连铸机扇形段远程自动调节辊缝的液压系统及其控制方案的分析
谷振云,李生斌(西安重型机械研究所,陕西 西安 710032)摘 要:分析了近年来从国外引进的板坯连铸机采用液压电气控制实现扇形段辊缝自动调节的基本工作要求,液压控制原理及各控制方案的特点。开关阀的控制方式已成功用于西安重型机械研究所设计制造的攀钢2#大方坯连铸机的轻压下系统。关键词:辊缝;自动调节;轻压下;液压控制中图分类号:TF77711 文献标识码:A 文章编号:1001-196X(2006)03-0001-05
AnalysisofthecontrolsolutionsandhydraulicsystemofCCMsegmentlong2distanceautomaticrollgapadjusting
GUZhen2yun,LISheng2bin(XiπanHeavyMachineryResearchInstitute,Xiπan710032,China)
Abstract:Thebasicrequirement,hydrauliccontrolmechanismandfeaturesofvarioussolutionsofCCMseg2mentautomaticrollgapadjustinghydraulicsystemintroducedfromabroadarediscussed.Theon2offvalvecontrolhasbeensuccessfullyappliedtothe2#bloomcastersoft2reductionsysteminPanSteel.Keywords:rollgap;automaticadjusting;soft2reduction;hydrauliccontrol
1 概述上世纪90年代中末期,欧洲的德马克、奥钢联以及意大利的达涅利等公司先后开发和研制成功了采用液压电气控制实现板坯连铸机扇形段远程自动调节辊缝的新技术,这一技术的成功应用也使扇形段对铸坯的动态轻压下成为可能,目前它已作为一项成熟技术广泛应用于世界各地许多冶金厂的连铸机设备中。近年来,我国上海一钢集团、武钢、济钢、鞍钢、攀钢等冶金厂从上述三个国外公司成套引进或国外设计与国内合作制造的几十台板坯连铸机扇形段也采用了远程自动调节辊缝和铸坯动态轻压下技术,这对提高铸
机的作业率(减少扇形段辊缝的调整时间)、改善铸坯质量、提高铸机自动化水平起到了明显作用。然而,国内的冶金科研院所和连铸成套设备设计、制造公司等部门和单位尚未作为独立的专有技术进行成功的开发和应用(目前西重所与宝钢研究院联合研制的试验铸机已获应用,2005
年5月已投产试验)。本文将在消化吸收国外先进技术的基础上对德马克和奥钢联两种不同的扇形段远程自动调节辊缝的液压控制方式做以初步分析。
2 扇形段辊缝自动调节的基本要求每个扇形段有四只夹紧液压缸(靠近扇形段上口和下口各两只),其结构是液压缸的活塞杆与扇形段的下框架相连,固定不动;而液压缸缸体与扇形段上框架相连,带动上框架及其辊组作
・1・2006No13 重型机械
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net升降运动,液压缸上装有可实现检测目的的位置传感器。按连铸机铸造工艺要求,扇形段实际工作和设定的辊缝是一个楔形(收缩)辊缝,沿着铸造方向扇形段上口设定的辊缝距离要比下口稍大一些,通常在不进行轻压下时1m机长的(对弧形区为弧线,对水平区为直线)距离上辊缝差约为0112~012mm,而进行轻压下时,压下区的辊缝收缩量多为014~111mm/m。而同为扇形段上口或下口的两只液压缸的定位停止位置应相同,以防扇形段上的辊子偏斜,通常辊子对水平位置的偏斜程度不大于±011mm,因此液压缸位置传感器的检测精度必须高于±011mm一个数量级。对板坯连铸机而言,扇形段上框架及其辊组的质量均较大,通常达几吨甚至几十吨以上,为保证液压缸的位置停止精度即设定的辊缝,应尽可能减少液压缸及上框架运动部件的惯性力和运动导向部位的摩擦力,为此扇形段上框架的升降动作接近停止时,液压缸的运动速度不能过大,否则难以保证扇形段辊缝的目标设定值,并易引起辊缝超调和液压电气环节的振荡。
3 扇形段辊缝自动调节过程扇形段辊缝的自动调节液压控制方案,如图1所示,奥钢联和德马克公司各自采用了完全不同的液压控制回路,达涅利公司采用的液压控制方式与德马克方式相类似。
・2・重型机械 2006No13
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net图1 辊缝自动调节的液压控制方案(a)奥钢联方式 (b)德马克方式 (c)达涅利方式
实际调整扇形段辊缝时,首先按照连铸生产要求,通过专用工艺软件,在计算机上同时设定和输入与本扇形段上、下口所需辊缝相应的给定信号电流。在调整的初始状态(如上框架与液压缸缸体在最上位),给定信号与液压缸位置传感器检测信号之间的误差信号电流最大,随着调整动作的进行,其误差电流信号逐渐减小。对于图1a所示的控制方案,该差值电流信号经电气调制后仅以导通电路的形式使电磁换向阀通入额定电压和电流,以使阀电磁铁动作,它与误差信号电流的大小无关,而极性的差别将用来控制三位四通电磁阀不同电磁铁的通、断电状态,即控制扇形段夹紧液压缸的升降运动的方向;当液压缸的尺寸参数、液压控制回路及组成原件(包括固定阻尼孔尺寸的大小)、供给油压都相同时,液压缸的运动速度也是相同的。由此可见只要液压控制回路的组成一定,液压缸将以一固定的速度完成辊缝调整动作以达到辊缝设定的目标值,其升降运动速度的大小将取决于在一定的压降下通过固定阻尼孔的流量和液压缸承压腔活塞的有效面积,与误差信号电流的极性和大小无关。液压缸调整动作的速度通常约为1~2mm/s,随缸径大小的不同,每只液压缸所需的流量仅为1~6L/min;扇形段四只夹紧液压缸的运动同步状况则由液压缸上的位置传感器加以检测并由电气系统控制。对于图1b所示的控制方案,采用比例伺服阀控制扇形段夹紧液压缸的升降动作,其辊缝调节过程大致如下。假定调整初始扇形段上框架在最上位,它相应于上、下口夹紧液压缸处零位,此时它们的位置传感器的反馈检测信号也为零;其次假定S
为与扇形段上口辊缝设定值相应的电气信号量,
ΔS为与上、下口辊缝设定差值相应的电气信号
量,扇形段向下运动时电气信号量的极性为“+”,反之则为“-”。按照生产要求,经计算机和带专用软件的电气控制器向本扇形段控制上、下口夹紧液压缸运动的四只电液比例伺服阀同时设定和输入电气信号量+S,此时给定信号与反馈检测信号之间的误差电流最大,于是扇形段夹紧液压缸将带动上框架以最大速度向下作平移运动,随着液压缸位置传感器反馈检测信号的加大(误差电流减小)
,
液压缸的运动速度将逐步减小,直到四只夹紧液压缸同时达到本扇形段上口辊缝设定值,即给定信号与反馈检测信号之间的误差电流消失,上口
・3・2006No13 重型机械
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net液压缸辊缝调整结束,运动停止。在此阶段,为防止扇形段上、下口液压缸运动过速和由此而引起的不同步,对电液比例伺服阀的输入信号采取了“限流”措施,即当原始给定信号与位置传感器反馈电流信号之间的误差电流超过最大限定电流时,四只液压缸的比例伺服阀均以最大限定电流作为阀的输入信号,该最大限定电流所对应的液压缸及其扇形段上框架的最大运动速度约为5~15mm/s,并以此作为选择比例伺服阀流量规格的依据;其次在上口液压缸运动停止之后,扇形段上、下口辊缝设定差值相应的电气信号量+ΔS将作为给定信号随之输入到控制扇形段下口夹紧液压缸的比例伺服阀中去,这时扇形段下口两只液压缸将继续带动上框架向下作倾斜运动,直至扇形段下口辊缝也达到设定的目标值,输入到电液比例伺服阀的误差电流信号+ΔS也消失,下口两只液压缸的运动停止,从而完成扇形段辊缝的自动调节。由此也可看出扇形段辊缝自动调节的全过程是一个可分为前后两个阶段,各有不同给定信号连续进行的过程。由于扇形段上、下口辊缝相差距离与扇形段本身铸流长度相比是十分微小的,在机械设备设计中已考虑扇形段上框架运动的导向间隙将不致于使上框架做微小倾斜运动时被卡死。虽然上框架辊子轴承座设有垫片组,但并不靠该垫片组调整辊缝,而是仅借辊缝位置设定信号保证扇形段的收缩辊缝和实现对铸坯的轻压下。当打开扇形段即抬起上框架时,其调节过程与前述过程相反,也为前后两个阶段:首先经电气控制器向扇形段下口液压缸的比例伺服阀输入与辊缝差值相应的电流信号-ΔS,使下口液压缸升起,当下口液压缸到达与上口液压缸相同的检测位置后,阀上的误差电流信号消失,下口液压缸的向上运动停止;继之同时向控制上、下口液压缸运动的比例伺服阀给定和输入与扇形段抬起位置相应的电信号,如使扇形段达到最大的开口度(上框架在最上位),这时的给定信号相当于零,而液压缸的位置反馈信号最大,阀上的误差电流信号也最大,但其极性相反,上、下口液压缸同时以最大速度向上运动,随着反馈电流信号的减小,液压缸的运动速度也逐步减小直至误差电流信号消失,扇形段上框架达到最上位,液压缸的运动随之停止。两个阶段的电气信号一次同时给定,运动是连续进行的。在铸机铸造工作模式下,如因辊子受力、框架热变形等各种因素的影响,所检测到的辊缝与原始设定辊缝出现微小偏离时,位置传感器所发出的检测信号将借助比例伺服阀自动调整扇形段夹紧液压缸所在的位置,使其始终保持在原始设定辊缝的位置上。在铸机实现动态轻压下的情况下,起始压下的扇形段将跟踪铸坯凝固终点,压下量决定于连铸工艺要求,这实质上也是一个远程自动设定和调整扇形段辊缝的问题。而动态轻压下的力是借助于夹紧液压缸经上框架的辊组对铸坯施压来实现的,所需压力大小与浇铸的钢种和铸坯的断面有关,可由通入夹紧液压缸的油压力来设定和调整。该油压力由扇形段上与液压缸夹紧油腔相连的压力传感器测得,可以开环或闭环调整和控制比例伺服阀的进口油压。德马克、奥钢联以及意大利达涅利等公司已成功开发出连铸机专用工艺软件,实现扇形段夹紧液压缸的位置及力的控制。不论在浇铸前原始设定辊缝或在轻压下的情况下自动调整辊缝,都是沿着铸流方向由前到后逐个扇形段依次进行的。