基于遗传算法的移动机器人动态避障路径规划方法
基于改进遗传算法的移动机器人路径规划
基于改进遗传算法的移动机器人路径规划作者:高扬王玉姣来源:《电脑知识与技术·学术交流》2008年第31期摘要:标准遗传算法在解决各类优化问题中获得成功,但它在具体的应用中由于缺乏对特定知识的利用,其性能有待提高。
将改进遗传算法用于移动机器人的全局路径规划,复杂的二维编码问题简化为一维编码问题,建立边界约束,路径点必须在障碍物之外,路径点连线不能与障碍物相交等3个约束条件,以机器人行走路径最短作为适应度函数进行遗传优化。
计算机仿真实验结果证明该算法在收敛速度、最优解输出概率方面相对于基本遗传算法有了显著提高。
关键词:遗传算法;路径规划;移动机器人中图分类号:TP24 文献标识码:A 文章编号:1009-3044(2008)31-0951-03Enhanced Genetic Algorithm for Robotic Path PlanningGAO Yang1, WANG Yu-jiao2(1.School of Mechatronic Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China;2.College of Mathematics and Information Science, Northwest Normal University, Lanzhou 730070, China)Abstract: Genetic algorithm has been very successful in solving optimization problems.However, due to the absence of utilizing specific knowledge of the particular context in which it is applied, its performance still requires improvements.A new approach of global path planning for mobile robot based on enhanced genetic algorithm is presented and the complex two dimension coding problem is converted into the one dimension ones. The restrictions on the boundary and the path node out of the obstacles and the restriction on the line between path nodes not crossing over the obstacles are put into .At the same time the fitness function meets the requirement of the shortest period of working length .The simulation results demonstrate that, the proposed algorithm achieved considerable improvements, with respect to the basic genetic algorithm,in convergence speed and optimal solution output rate.Key words: genetic algorithm; path planning; mobile robot不论是哪种类别的移动机器人,它在进行工作时,往往要求根据某准则,在工作空间中沿着一条最优的路径行走。
基于一种混合遗传算法的移动机器人路径规划

摘 要:移动机器人路径规划问题一直是机器人学研究的核心内容之一,而遗传算法作为智能仿生学算法在路径规划
中得到了广泛的应用。针对传统遗传算法存在局部搜索能力差的问题,文中研究在已知环境下运用一种基于遗传算法和模
拟退火算法相结合的技术对移动机器人进行最优路径的规划方法。算法采用栅格法对环境建立模型,同时在遗传算子中添
Copyright©博看网 . All Rights Reserved.Leabharlann 收稿日期:2018⁃04⁃06
修回日期:2018⁃05⁃30
基金项目:云南大学服务云南行动计划项目(KS161012)
Project Supported by Serving Yunnan Action Plan of Yunnan
University(KS161012)
条件。机器人路径规划图如图 1 所示。
Abstract:The path planning problem of the mobile robot is always one of the core contents of robotics research,and the genetic algorithm,as an intelligent bionics algorithm,has been widely used in path planning. In allusion to the poor local search capability problem of the traditional genetic algorithm,the mobile robot optimal path planning method is researched in this pa⁃ per by using the genetic algorithm and simulated annealing algorithm combined technology in a known environment. In the algo⁃ rithm,the grid method is used to construct the environmental model. The insert operator and delete operator are added in genet⁃ ic operators to optimize the path. The experimental results of the Matlab simulation show that in comparison with the basic genet⁃ ic algorithm,the algorithm has an obvious improvement in convergence speed and search quality.
基于优化遗传算法的移动机器人路径规划

机床与液压Feb.2019 2019年2月第47卷第3期MACHINE TOOL&HYDRAULICS Vol.47No.3 DOI:10.3969/j.issn.1001-3881.2019.03.008本文引用格式:王功亮,王好臣,李振雨,等.基于优化遗传算法的移动机器人路径规划[J]•机床与液压,2019,47(3):37-40.WANG Gongliang,WANG Haochen,LI Zhenyu,et al.Path Planning for Mobile Robots Based on Optimized GeneticAlgorithm[J].Machine Tool&Hydraulics,2019,47(3):37-40.基于优化遗传算法的移动机器人路径规划王功亮,王好臣,李振雨,李家鹏(山东理工大学机械工程学院,山东淄博255000)摘要:针对移动机器人在路径规划过程中,由于传统遗传算法中适应度函数把路径最短作为遗传到下一代主要因素,造成机器人转弯次数过多引起时间浪费问题,提出一种基于改进遗传算法的路径规划方法,通过对适应度函数添加转弯角度控制因子,把路径最短和转弯角度作为路径个体适应度函数值大小的影响因素,并对改进后的适应度函数进行了收敛性分析。
最后通过MATLAB进行了仿真分析,结果表明:机器人运动轨迹更加平滑,减少了转弯次数,仿真结果说明该算法具有一定的有效性。
关键词:移动机器人;遗传算法;路径规划;函数优化;仿真中图分类号:TP242.6Path Planning for Mobile Robots Based on Optimized Genetic AlgorithmWANG Gongliang,WANG Haochen,LI Zhenyu,LI Jiapeng(School of Mechanical Engineering,Shandong University of Technology,Zibo Shandong255000,China) Abstract:Aiming at the path planning of mobile robots,because the fitness function in the traditional genetic algorithm takes the shortest path as the main factor to be inherited to the next generation,too many times of robot turning lead to the problem of time waste.A path planning method based on improved genetic algorithm was proposed.By adding the control factor of turning angle to the fitness function,the shortest path and the turning angle were taken as the influencing factors of the value of the individual fitness function of the path,and the improved fitness function was analyzed for its convergence.Finally,the simulation experiments were carried out by MATLAB.The results show that the trajectory of robot is more smooth,and the number of turns has been reduced.The simulation results verify the effectiveness of the algorithm.Keywords:Mobile robot;Genetic algorithm;Path planning;Function optimization;Simulation0前言随着近年来移动机器人应用领域的广泛性以及应用环境的多样性,移动机器人的路径规划成为研究的热门问题,路径规划是引导机器人如何选择最优路线,控制机器人从起点到目标点进行运动,目的是在机器人整个运行过程中,满足某种优化指标如花费时间最少、路径最短或者能量消耗最低。
基于一种混合遗传算法的移动机器人路径规划

基于一种混合遗传算法的移动机器人路径规划 裴以建;杨亮亮;杨超杰 【摘 要】移动机器人路径规划问题一直是机器人学研究的核心内容之一,而遗传算法作为智能仿生学算法在路径规划中得到了广泛的应用.针对传统遗传算法存在局部搜索能力差的问题,文中研究在已知环境下运用一种基于遗传算法和模拟退火算法相结合的技术对移动机器人进行最优路径的规划方法.算法采用栅格法对环境建立模型,同时在遗传算子中添加插入算子和删除算子以优化路径.Matlab仿真实验结果表明,该算法相对于基本遗传算法的收敛速度,搜索质量等有了明显的提高.
【期刊名称】《现代电子技术》 【年(卷),期】2019(042)002 【总页数】4页(P183-186) 【关键词】移动机器人;遗传算法;模拟退火算法;栅格法;路径规划;Matlab 【作 者】裴以建;杨亮亮;杨超杰 【作者单位】云南大学 信息学院,云南 昆明 650500;云南大学 信息学院,云南 昆明 650500;云南大学 信息学院,云南 昆明 650500
【正文语种】中 文 【中图分类】TN830.1-34;TP242
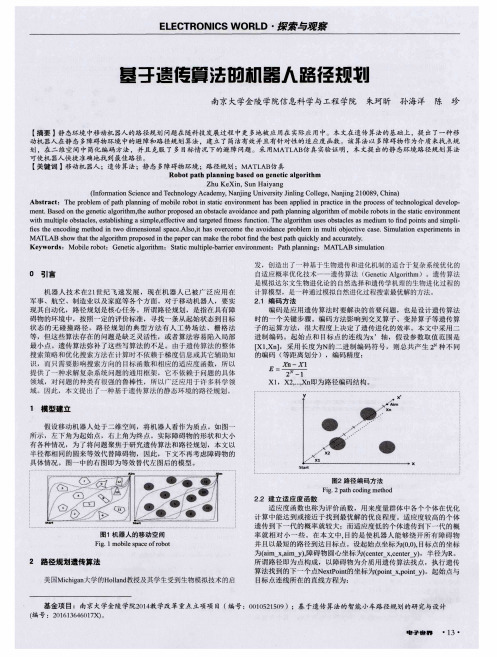
0 引 言 移动机器人是一种集环境感知、动态决策与规划、行为控制与执行等多项功能于一体的高智能化机器系统[1]。2013年美国提出制造业回归,规划机工业机器人作为先进产业,机器人革命成为第三次工业革命的切入点和重要增长点。在实际生活中,移动机器人在面对各种复杂的障碍物环境,主要依靠机器人对环境的感知,自行设计一条最优或者次优的路线达到指定的目的点[2]。路径规划主要解决移动机器人的两个主要问题:选择合理的途径是机器人能够达到指定位置;优化机器人到达指定位置所用的时间、精确度、路径是否最短等条件。机器人路径规划图如图1所示。 图1 机器人路径规划图Fig.1 Path planning diagram of robot 由图1可知,机器人的路径规划主要是对现实问题建立一种抽象化模型,根据符合条件的路径搜索算法寻求一种合适的路径。目前应用广泛的路径算法有人工势场法[3]、栅格法[4]、神经网络算法[5]等。凭借各自的优势在路径规划中经常使用,但是这些算法也存在着局部极小值、计算量大等缺点。遗传算法作为路径规划方面研究的热点,遗传算法策略的设计从微观上主要讨论群体的规模、参数的设计以及遗传算子的方法对求解能力的影响,宏观上主要以遗传算法为基础,加入其他算法形成混合遗传算法以提高遗传算法的寻优能力。基本遗传算法虽然具有良好的寻优能力,但由于早熟现象以及收敛速度慢等影响着性能。为解决遗传算法的缺陷,本文采用栅格法建立模拟环境模型,增加插入算子和删除算子,把具有很强的局部搜索能力的模拟退火算法引入遗传算法中以改善机器人的搜索能力。 1 环境模型的建立 本文的机器人使用的环境模型采用文献[6]提出的网格理论,如何确定网格的大小是主要问题,较小的网格对障碍物的描述更精确,但会影响计算机存储空间,导致算法变得复杂,因此需要综合考虑网格的大小[7]。在考虑机器人的工作环境模型时,通常做一些假设: 1)在工作空间中移动不应考虑机器人的大小,在二维空间中移动。 2)所构建的地图网格大小一样,用数字“1”标记障碍物网格,可用数字“0”标记机器人的路径可行区域。 3)机器人在运动过程中,障碍物的大小和位置不会改变。 如图2所示,描述网格相对位置方面优势的直角坐标法能够计算分析路径长度和路径的可行性。另外,序列法占用的内存空间相对较少,常用在遗传操作。本文将这两种方法相结合,当然在算法过程中这两种方法需要运用换算公式进行转换。
基于量子遗传算法的移动机器人的一种路径规划方法

基于量子遗传算法的移动机器人的一种路径规划方法刘传领;雷燕;杨静宇【期刊名称】《计算机科学》【年(卷),期】2011(038)008【摘要】以人工势场法和栅格法为基础,考虑到遗传算法的“收敛速度慢”和“早熟收敛”问题,提出了一种基于量子遗传算法的机器人路径规划方法.该方法采用栅格法进行路径规划,利用人工势场法控制移动机器人,利用量子遗传算法选择最优或次优个体,并且引入双适应度评价函数评价进化个体,为最优或次优个体进入下一代提供了保障.仿真实验表明,该方法的寻优能力及稳定性均优于遗传算法和量子遗传算法,且具有更好的收敛性以及更强的连续空间搜索能力,适于求解复杂优化问题.%Based on artificial potential field and grid method, in order to solve the prematurity and lower convergence speed in genetic algorithm(GA) for robotic path planning,a novel mobile robot path planning method based on quantum genetic algorithm(QGA) was proposed. This method uses grid method to establish mobile robot work environment model,artificial potential field to control mobile robot,quantum genetic algorithm to select the optimal or sub-optimal path,and double fitness evaluation function to evaluate the path to protect the optimal or sub-optimal path in to the next generation. The ability of finding the best solution and the stability of this method are greatly improved compared with GA and QGA by Simulation,and it has better convergent property and ability of searchingmore extensive space. It is fit for the solution of complex optmization problems.【总页数】4页(P208-211)【作者】刘传领;雷燕;杨静宇【作者单位】南京理工大学计算机学院南京210094;商丘职业技术学院软件学院商丘476100;商丘职业技术学院软件学院商丘476100;南京理工大学计算机学院南京210094【正文语种】中文【中图分类】TP24【相关文献】1.盲区条件下一种基于记忆机制的移动机器人快速路径规划方法 [J], 高扬;邹丹;胡大伟;王来军;杨京帅2.一种基于滚动窗口的移动机器人局部路径规划方法 [J], 韩龙;刘国栋3.一种基于粒子群算法的移动机器人路径规划方法 [J], 赵先章;常红星;曾隽芳;高一波4.一种基于改进人工势场的移动机器人路径规划方法 [J], 张庆龙;刘国栋5.基于人工势场和量子遗传算法的移动机器人路径规划方法 [J], 侯翔因版权原因,仅展示原文概要,查看原文内容请购买。
基于遗传算法的机器人路径规划
( I n f o r m a t i o n S c i e n c e a n d T e c h n o l o g y Ac a d e my , Na n j i n g U n i v e r s i t y J i n l i n g C o l l e g e , N a n j i n g 2 1 0 0 8 9 , C h i n a )
可使 机 器人 快捷 准确地 找到 最佳路 径 。
【 关键词 】移动机器人 ;遗传算法;静 态多障碍物环境;路径规划;MA T L A B 仿真
Ro bo t pa t h pl a nni ng ba s e d o n ge ne t i c al go r i t hm Zh u KeXi n,Su n Ha i ya ng
me nt . Ba s e d o n t h e ge ne t i c a l g or i t h m, t h e a ut h or pr o p os e d a n o bs t a c l e a v oi d a n c e a n d p a t h pl a n n i ng a l g or i t h m o f mo bi l e r o b ot s i n t h e s t a t i c e nv i r o n me n t wi t h mu l t i pl e o bs t a c l e s ,e s t a b l i s h i ng a s i mp l e , e fe c t i v e a n d t a r g e t e d it f n e s s f un c t i o n. Th e a l g o it r hm u s e s o b s t a c l e s a s me d i u m t o in f d p o i n t s a n d s i mpl i —
基于遗传算法的机械手臂轨迹规划
基于遗传算法的机械手臂轨迹规划引言机械手臂是现代工业自动化的重要组成部分,广泛应用于各个领域,如汽车制造、电子设备装配等。
而机械手臂的轨迹规划是实现精确操作的关键。
本文将介绍基于遗传算法的机械手臂轨迹规划,并深入探讨其原理、优势和应用。
一、机械手臂轨迹规划的挑战机械手臂轨迹规划的挑战来自于多个方面。
首先,机械手臂是高度非线性的系统,其运动涉及多个关节的协同工作,因此必须考虑各个关节之间的相互制约关系。
其次,机械手臂的操作空间是多维的,遍布整个工作区域,因此需要找到最优轨迹来实现所需的操作任务。
此外,其他因素如避障和快速响应也需要在规划过程中综合考虑。
传统的机械手臂轨迹规划方法通常采用启发式算法,如A*算法和RRT算法。
然而,这些算法在处理高度非线性的问题上存在一定的局限性。
而基于遗传算法的机械手臂轨迹规划则能够克服这些局限性,具有许多优势。
二、基于遗传算法的机械手臂轨迹规划原理遗传算法是一种模拟生物进化过程的优化算法,能够在大规模的解空间中进行全局优化。
其主要原理包括选择、交叉和变异。
在机械手臂轨迹规划中,首先需要将问题抽象成一个适应度函数。
该函数度量了机械手臂轨迹的质量,例如轨迹的长度、速度和避障能力等。
然后,通过随机生成一组个体(即轨迹解),并计算每个个体的适应度值。
根据适应度值,通过选择操作来确定父代个体。
选择操作的基本思想是优先选择适应度高的个体。
接下来,通过交叉操作将父代的染色体(轨迹解)进行组合,产生新的后代个体。
最后,通过变异操作对后代个体的染色体进行微调,增加解的多样性。
通过不断迭代以上步骤,直到达到预设的停止条件为止。
迭代过程中,较优的个体会向下一代传递,从而逐步优化整个轨迹解的质量。
三、基于遗传算法的机械手臂轨迹规划优势相对于传统的方法,基于遗传算法的机械手臂轨迹规划具有以下优势。
1. 全局优化:传统方法易陷入局部最优解,而遗传算法能够在大规模解空间中进行全局优化,找到更优的解。
基于遗传算法的机器人路径规划
基于遗传算法的机器人路径规划崔瑾娟【摘要】静态环境中的移动机器人全局路径规划是路径规划中的一个重要问题,本文采用遗传算法遗传算法解决移动机器人的路径规划.该方法首先采用栅格法环境建模,采用遗传算法规划机器人路径,最后用MAT-LAB来实现算法,仿真后,观察路径,得出最终结果.【期刊名称】《洛阳师范学院学报》【年(卷),期】2013(032)002【总页数】3页(P35-36,42)【关键词】遗传算法;路径规划;MATLAB【作者】崔瑾娟【作者单位】山西机电职业技术学院,山西长治046011【正文语种】中文【中图分类】TP180 引言移动机器人的路径规划[1]问题就是在有障碍的环境中,按照一定的评价目标,产生一条从起始位置到目标位置的无碰路径.而遗传算法[2]是以自然遗传机制和自然选择等生物进化理论为基础,构造的一类随机搜索算法,它具有运算简单、收敛速度快等优点,在全局寻优方面也具有高效性和隐含并行性.本文采用了栅格法对移动机器人的工作环境进行建模,用遗传算法规划移动机器人的最短路径.1 栅格法环境建模自由空间和障碍物均可表示成栅格块的集合.在MATLAB中,经过编程获得的环境模型如图1所示.图中黑色栅格表示障碍栅格,白色部分表示自由栅格.图1 栅格法表示的环境模型2 栅格标识栅格标识可以采用直角坐标法和序号法相结合的方式.在该栅格图中按照从左到右、从上到下的顺序,从栅格左上角第一个栅格开始,将0~99这100个数字对栅格逐一进行编号,来分别表示路径空间中的每一个区域,其中“0”代表移动机器人的路径起点,“99”代表路径终点.对已建立的栅格模型添加序号编码后的仿真图形如图2所示.图2 栅格坐标和序号的对应关系此外序号法标识的栅格与直角坐标法标识的栅格是互为映射关系的,序号为pop(i,j)的坐标可由式(1)决定.栅格pop(i,j)的序号可由式(2)决定其中mod表示求余运算,floor表示高斯求整运算.在表示移动机器人运动路径的时候将采用序号法,因为序号法表述简洁明了,便于遗传算子的操作.而在对路径质量进行评价时,应转化为直角坐标形式,因为直角坐标法更便于表示栅格之间的相对位置.3 遗传算法路径规划的方法3.1 初始种群的产生初始种群是遗传算法进化计算的起点,它是由一定数目的个体组成.为了保证遗传算法的全局最优性,初始种群应尽可能随机分布在搜索空间的每一个区域.本文采用连续无障碍法产生初始种群.3.2 适应度评价函数个体适用度评价函数直接影响到遗传算法的计算效率.适当的选择适应值函数可以保证获得最优路径.这里选取如下所示表示个体的适应度评价函数:式中,n表示路径通过的栅格数目,D代表该路径的个体中相邻序号间直线距离之和.3.3 遗传操作算子(1)选择操作.本文采用了赌轮盘的选择方法,即首先计算适应值函数值,然后按照轮盘赌选择的方法选择出新的种群.(2)交叉操作.本文采用的是单点重合点交叉的方,即选出需要交叉的二个个体,然后随机选择交叉点,对交叉点处栅格序号完全相同的点进行交叉操作.这种重合点交叉的方式不会产生断点.(3)变异操作.在本次基本遗传算法运行过程中,没有采用变异算子,因为变异操作有可能产生间断路径.3.4 终止条件遗传算法的终止条件采用最大进化代数和设定收敛条件的复合准则.当遗传算法满足设定的收敛判断条件时,遗传算法终止;若进化了指定的代数仍然没有满足设定的收敛判断条件,也令遗传算法终止.本文的终止条件是按照指定的进化代数进行判断.4 仿真研究在栅格环境为10×10,障碍物数目为21,交叉概率pc=0.8,种群规模popsize=20,染色体长度poplength=18,最大进化代数gen=50,图3和图4分别为在MATLAB环境下路径规划目标函数值变化曲线和最优路径的仿真结果图. 图3 目标函数值变化曲线图4 路径规划仿真结果图在图3中,红色表示种群中最优解的变化,即每一代中路径最短的个体的变化曲线.蓝色表示种群均值的变化,即每代中路径长度的平均值的变化曲线.在图4中,显示了在栅格环境中利用遗传算法找到的最优路径,用红色线表示.显示的最短路径为{1 11 21 22 23 34 45 46 47 57 68 78 89 99 0 0 0 0},其长度为14.6569.5 小结本文将遗传算法应用于移动机器人路径规划问题,通过MATLAB仿真,数据表明取得了很好的效果.目前遗传算法在诸多实际应用中也显示了很好的优越性.遗传算法必将在智能计算领域中起到关键的作用.参考文献[1]张颖,吴成东,于谦.基于遗传算法的机器人路径规划[J].沈阳建筑工程学院学报,2002,18(4):21-24.[2]周明,孙树栋.遗传算法原理及应用(第一版)[M].北京:国防工业出版社,1999.[3]李军,边肇祺.用于最优化的计算智能(第一版)[M].北京:清华大学出版社,1999.[4]胡玉兰,朱立忠.基于遗传算法的机器人路径规划的应用研究[J].机械设计与制造,2002,05:36-38.。
基于改进遗传算法的机器人动态路径规划
基于改进遗传算法的机器人动态路径规划
王雷;李明;唐敦兵;蔡劲草
【期刊名称】《南京航空航天大学学报》
【年(卷),期】2016(048)006
【摘要】针对基本遗传算法解决移动机器人路径规划的不足,提出了一种改进的遗传算法.首先,采用栅格法对机器人路径规划进行建模.然后,提出一种生成初始种群的方法和精英策略,设计出自适应变异概率,提高了算法的求解质量.同时,在规划过程中,将全局路径规划与局部路径规划相结合,并且根据机器人与动态障碍物碰撞类型的不同,提出了相应的避碰策略.仿真实验表明:该算法优于基本遗传算法,能够有效地指导机器人在动态环境中实现避障,获得无碰最优或次优路径.
【总页数】6页(P841-846)
【作者】王雷;李明;唐敦兵;蔡劲草
【作者单位】安徽工程大学机械与汽车工程学院,芜湖,241000;安徽工程大学机械与汽车工程学院,芜湖,241000;南京航空航天大学机电学院,南京,210016;安徽工程大学机械与汽车工程学院,芜湖,241000
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于遗传算法的机器人动态路径规划的仿真 [J], 谢宏斌;刘国栋;李春光
2.基于遗传算法的移动机器人动态路径规划研究 [J], 王海英;蔡向东;尤波;张礼勇
3.基于改进遗传算法的自动导引小车动态路径规划及其实现 [J], 刘二辉;姚锡凡;蓝宏宇;金鸿
4.基于改进遗传算法的动态路径规划研 [J], 董小帅;毛政元
5.基于改进蚁群算法的移动机器人动态路径规划 [J], 任红格;胡鸿长;史涛
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进型遗传算法的动态避障路径规划方法
基于改进型遗传算法的动态避障路径规划方法
陈华华;郭晔;杜歆;顾伟康
【期刊名称】《传感技术学报》
【年(卷),期】2006(19)2
【摘要】针对遗传算法易陷入局部最优的不足,在标准遗传算法基础上加入了三个新的操作-复原、重构和录优操作,使改进后的遗传算法收敛于全局最优,并在此基础上以路边约束、动态避障和路径最短作为适应度函数,提出了动态避障的路径规划方法.通过实验仿真验证了算法的有效性、准确性和实时性,并与基于以往的遗传算法的路径规划方法进行比较,结果表明本文提出的方法在产生的路径长度和算法运行时间上都具有更优的性能.
【总页数】5页(P520-524)
【作者】陈华华;郭晔;杜歆;顾伟康
【作者单位】杭州电子科技大学通信工程学院,杭州,310018;浙江大学校园网络中心,杭州,310027;浙江大学信息与电子工程系,杭州,310027;浙江大学信息与电子工程系,杭州,310027
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于遗传算法的深海集矿车避障路径规划方法 [J], 廖平;傅杰
2.基于神经网络和遗传算法的机器人动态避障路径规划 [J], 陈华华;杜歆;顾伟康
3.基于遗传算法的机械臂实时避障路径规划研究 [J], 韩涛;吴怀宇;杜钊君;郑秀娟
4.基于极限环导航方法的移动机器人动态避障路径规划 [J], 程福;马英庆
5.基于改进型DWA的移动机器人避障路径规划 [J], 卞永明;季鹏成;周怡和;杨濛因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第15卷第2期2002年6月模式识别与人工智能PR&AIv0115No2June2002
基于遗传算法的移动机器人动态避障路径规划方法李庆中顾伟康叶秀清(浙江大学信息与电子工程学系杭州310027)
摘要本文提出了一种基于遗传算法的简单、有效的移动机器人实时动态避障路径规划方法.为利用遗传算法实时、稳定地进行动态路径规划.本文将复杂的二维路径编码问题简化为一维编码问题,并把路边约束、动态避障要求和最短路径要求融合成一个简单的适度函数.仿真实验表明.本文提出的动态路径规划方法可实时、稳定地产生移动机器人运动的最佳局部规划路径,且具有良好的动态避障性能该方法也可用于智能车辆的自动导航
关键词遗传算法,路径规划,动态避障,移动机器人中围法分类号TPl8・TP242・6A
1引言移动机器人是能够在道路和野外连续、实时地自主运动的智能机器人,是一种集环境感知、动态央策与规划、行为控制与执行等多项功能于一体的高智能化机器系统基于机器视觉的移动机器人,其关键技术是计算机视觉技术和智能控制技术在每个控制循环过程中,移动机器人的动态行为是,机器视觉获取前方的路面环境及障碍物信息,然后通过智能系统产生局部最优规划路径,并用智能路径跟踪控制方法使移动机器人沿规划的路径行走.对于在动态环境中移动机器人的局部路径规划问题,传统的寻优策略因复杂而费时,难以用于移动机器人的实时导航.前人的研究表明遗传算法在这方面具有较大潜力”1….为使实时应用得以实现,关键是确定简单、有效的遗传编码技术和目标评价函数.本文利用遗传算法,对基于机器视觉的移动机器人的实时动态避障路径规划进行了研究,将复杂的二维路径编码问题简化为一维,并把路边约束、动态避障和最短路径要求融合成一个简单的适度函数最后通过仿真实验,验证了本文提出的方法的有效性和准确性.收稿Et期:2001—05—16;修回日期:2001—09—102移动机器人组成与动态控制规划策略
本研究采用的移动机器人平台是美国TROB()T公司的ATRv一2产品.其动力传动采用四轮驱动系统,每个轮子由一个直流电机驱动,各个轮子的转速由平台内部的计算机系统控制.在此智能移动平台上,我们建立了基于机器视觉的移动机器人系统,其外形如图1所示.其中视觉系统由移动
图l移动机器人外形机器人上方的彩色CCD摄像机和内部微机主板上的图像采集卡组成.机器人前方装有激光雷达和声
万方数据模式识别与人工智能纳装置.视觉系统为移动机器人提供前方道路环境的图像信息,激光雷达可快速测量前方障碍物的远近和速度,声纳用于近距离突发障碍物的紧急刹车移动机器人控制策略主要有环境信息反馈法∞J和路径规划跟踪法两种信息反馈法包括势场法1“、虚力场法和基于网络结构的方法等,这些方法的特点是根据传感器测定的环境信息,综合确定机器人的运动方向与速度控制量,将参考路径的生成和路径的跟踪控制结合在一起.其优点是系统的实时性提高+但因为没有进行参考路径的规划,所以不能保证机器人的行走路径为最佳此外,还会出现机器人运动方向多变从而使机器人的稳定性和安全性下降等问题因此,在实际应用中,多采用路径规划跟踪法,即把局部路径规划功能和路径跟踪功能分开,由两模块完成,这样可以克服信息反馈法的弊病.本文采用这种方法,具体的控制规划策略是,在移动机器人行走之前,首先对机器人将要行走的路线进行全局规划;当机器人行走以后,则由机器视觉、激光雷达等传感装置,实时测量前方的路面环境信息和动态障碍物信息,然后在机器视觉的预瞄范围内,进行局部路径的动态规划,然后由智能控制算法实现路径的跟踪控制,以实现避障等功能;而对于前方突然出现的近距离障碍物,或实在无法避开的障碍物,则由声纳快速反应,实现紧急刹车处理.路径的全局规划,是一个离线规划问题,比较容易解决.声纳的紧急刹车控制,属于条件反射性的控制,也易于实现.以上问题的关键是环境动态信息的快速、准确获取,动态局部路径的实时规划,以及路径跟踪的智能控制.动态环境是在路面环境中,存在静态或动态的障碍物.而这些障碍物在初始的全局路径规划过程中是无法预知的.我们已经开发了比较成熟的路径跟踪智能控制方法,运动障碍物信息的快速获取正在研究过程中,本文主要介绍实时动态路径规划的方法局部动态路径规划的基本策略是,从移动机器人的当前位置出发,根据机器视觉和激光雷达得到的路边约束和障碍物的运动速度与运动方向等信息,在机器视觉的一定预瞄范围内实时规划出一条安全、可行的最短参考路径,该参考路径必须满足路边约束条件和动态避障条件,是由一定间距的点序列构成移动机器人沿参考路径运动的同时,以机器人当前行走速度,对参考路径进行新一轮规划,并由重新规划的路径代替原参考路径,进入下一轮的路径跟踪控制,使机器人沿动态参考路径不断向全局目标点接近.每次局部规划路径的长度必须足够大,15卷使移动机器人有时间避开障碍物、以及能对前方未规划区域中的路径进行规划,并使两次规划的路径有足够的重叠长度,从而保证运动路径的可靠性和最优性.
3遗传路径规划算法遗传算法(GA)是一种基于自然选择和自然遗传的全局优化算法,它采用从自然界选择、遗传操作中抽象出来的几个算子,对参数编码的字符串进行遗传操作,每一字符串对应于一个可行解,这种遗传操作是对多个可行解组成的群体进行的,故在进化过程中町以并行地对解空间的不同区域进行搜索,可使搜索趋于全局最优解而不会陷于局部极小解.正是由于这种内在的优良特性,GA可广泛应用于各种优化问题遗传算法的操作算法主要有:(1)复制或选择算子(ReproductionorSelect):
将父代的个体原封不动地传递到子代,在复制过程中,每个个体是按照适应度值的大小决定其能否被复制到下一代的概率,复制算子可使群体中的优秀个体数目逐渐增加,使进化过程向更优解的方向发展,反映了自然界中优胜劣汰的法则.(2)交叉算子(Crossover):上面的复制算子只能在现有群体中寻优,而不能产生与父代不同的个体,交叉算子可使同一代的某对个体问,按一定的概率交换其中的部分基因,从而产生新的基因组合,町望获得比父代更好的个体(3)变异算子(Mutation):复制和交叉算子只能在现有基因型的排列组合内寻找最优,而不能产生新的基因型,变异算子可使基因型发生变化,从而扩大寻优范围.可见GA的主要优点是:采用群体方式对目标函数空间进行多线索的并行搜索,可同时对多个日『行解进行检查,交叉算子、变异算子可使可行解之间交换信息和产生新的可行解,不会陷入局部极小点;GA只需要可行解目标函数的值,而不需要其它信息,对目标函数的连续性、可微性没有要求,因此使用方便;解的选择和产生采用概率方式,因此具有较强的适应能力和鲁棒性.3.1路径编码方式在遗传算法中,对于固定的适应度函数,编码的长度和搜索空间的大小直接决定了在线计算的时间,因此,本文采用了简化编码长度的技术,即把路径的二维编码简化为一维编码.编码技术如图2所示.图中的起始点即移动机器人的当前位置,目标点
万方数据2期李庆中等:基于遗传算法的移动机器人动态避障路衽规划方法是机器视觉预瞄范围内的局部路径的目标点,规划的路径就是在起始点和目标点之间,在图中所示的路边约束范围内,确定最佳路径的点序列坐标.在地面坐标系XOY中,路径点序列的坐标是二维的,为降低编码长度,对坐标系进行了变换,新的坐标是xoy,x轴为起始点与目标点的连线,然后把X轴等分成z】、z2、…、z。,则优化的路径点就简化为一维的_坐标编码优化问题.编码采用浮点数形式,编码格式如图3所示图2路径编码方法示意图区Ⅱ五丑二卫图3路径编码形式3.2适应度函数的确定适应度函数是影响遗传算法收敛性和稳定性的重要因素,本文动态路径的规划要求满足三个条件:即路径在路边约束之内、能动态避障以及路径最短.Noboru-lJ、Woonggie_21都是采用各项评价函数加权求和的形式来确定适应度函数,这种适应度函数的缺点是各个权系数很难调整和确定,即各个权系数不是恒定不变的,是随着路径和障碍物的情况变化而变化的.因此,本文在确定适应度函数时,尽量使适应度函数的项数最少,但又必须把路径规划的三个条件融合在遗传优化过程中.下面分别介绍三个条件的实现过程.由机器视觉得到的路边信息,我们采用如图2所示的折线形式,则组成路边的各个折线的方程易求路边约束限制了解空间的范围,即各个Y,值只能在路边约束范围内取值,各个点的Y:值取值范围的确定方法如下:在图2中.首先计算出各个z.位置与z轴垂直的各直线与路两边折线相交的两个Y坐标值,然后再分别向路中心收缩一定量,收缩量的确定是按照机器人中心必须远离路边的安全距离确定的,显然安全距离应大于移动机器人的最大半径,设确定的Y,的取值范围是(Ylt,M2)因此路边约束的适应度函数fitl可表达为…11如果∞l≤Y,≤∥,2。。【0否则
式中i为路径上的所有点.上式表明,只要各个路径点在离路边的安全距离之内,则适应度为I,否则为0,这样确定是比较符合实际情况的.动态避障是比较关键的一个约束条件,假设障碍物的个数、障碍物的位置和速度信息可由机器视觉和激光雷达确定;在局部动态路径的规划过程中,假设移动机器人以当前的速度行走,各障碍物也以当前测定的速度做匀速直线运动,因为控制周期一般小于500ms,此外,路径跟踪控制算法会自动控制机器人行走速度的变化,因此在路径规划过程中,可以不考虑机器人和障碍物行走速度的变化动态避障的基本条件是,对于某一路径,组成路径的各点与各障碍物之间的最小距离必须大于机器人与障碍物的半径之和.设机器人从当前点Po到P:(丑,Y,)需要的时间为t,,从P,1(z。.1,Y:1)至只(z,,Y,)所用的时间为t—l,则f:=f:l十tl,(2)其中
1,(3)』一1,’
、J,
式中v是移动机器人的当前速度设在时刻t,,第^个障碍物的位置为。触(z眦(£,),m(t,)),则%(t,)=z№(to)十V0f:,…
%(f,)=掘(20)+Uvf。,…
式中(m(to)、Ybk(to))是第k个障碍物的起始坐标,%、U。是第k个障碍物的当前速度U在xoy坐
标系中的分量.设在时刻£,,路径点P,(t,Yi)与第k个障碍物的距离dm为dm=√(z,一3SM(t。))2+(Y,一Ybk(t,))2,(5)
则对于任意一条路径,路径上点与障碍物的最短距离DⅡⅡ。为D。。=min(dm),i=1,2,…,";^=1,2,‘一,m(6)式中”是组成路径的点的个数,m为障碍物的个数.由此可得动态避障的适度函数一r2为f1如果D~≥Ro+忌fit2=<女=1,2,…,m
(7)
【O否则
万方数据