重卡双前桥转向梯形机构的建模及设计
汽车转向梯形机构设计中的参数定义

汽车转向梯形机构设计中的参数定义在汽车的转向系统中,梯形机构起着至关重要的作用。
它是将驾驶员的转向输入转化为车辆前轮的转向角度的关键部件。
梯形机构的设计涉及到多个参数的定义,这些参数直接影响着汽车的转向性能和安全性。
本文将围绕汽车转向梯形机构设计中的参数定义展开讨论,以期帮助读者更好地了解梯形机构的设计原理和优化方法。
1. 转向比(Steering Ratio)转向比是指驾驶员转动方向盘一定角度时,前轮转动的角度比例。
转向比的大小直接影响着汽车的转向灵活性和稳定性。
一般来说,转向比越大,驾驶员转动方向盘的力度越小,但转向的角度也相应较小。
而转向比较小的车辆则需要驾驶员施加更大的力量来完成转向操作,但转向的角度相对较大。
因此,在梯形机构的设计中,需要合理选择转向比,以平衡灵活性和稳定性的要求。
2. 转向机构总传动比(Total Steering Gear Ratio)转向机构总传动比是指从方向盘到前轮转角的传动比。
它由多个参数组成,包括转向机构内部的传动比和梯形机构的传动比等。
转向机构总传动比的大小决定了驾驶员转动方向盘的力度与前轮转动角度之间的关系。
通常情况下,总传动比越大,驾驶员需要施加的力量越小,但前轮转动的角度也相应较小。
因此,在设计中需要综合考虑驾驶员的操作习惯和车辆的转向需求,选择合适的总传动比。
3. 梯形机构长度比(Length Ratio)梯形机构长度比是指梯形机构各杆长的比值。
梯形机构的长度比直接影响着前轮的转向角度。
一般来说,长度比越大,前轮转向的角度也越大。
但同时,长度比的增大也会增加梯形机构的长度,增加了转向机构的复杂性和重量。
因此,在梯形机构的设计中,需要权衡转向角度和机构的尺寸,选择适当的长度比。
4. 梯形机构的安装角度(Installation Angle)梯形机构的安装角度是指梯形机构与车辆纵向轴线的夹角。
安装角度的大小直接影响着汽车的转向稳定性和操控性能。
一般来说,安装角度越小,转向的稳定性越好,但操控性能可能会受到一定的影响。
汽车转向梯形优化设计

转向梯形的优化设计1.转向梯形机构概述 (3)2.整体式转向梯形结构方案分析 (3)3.整体式转向梯形机构优化分析 (4)4.整体式转向梯形程序编写 (7)5.转动传动机构强度计算 (12)6.转向梯形的优化结果 (13)7.转向梯形结构设计图形 (13)8.结论 (15)转向梯形机构优化设计方案一、转向梯形机构概述转向梯形机构用来保证汽车转弯行驶时所有车轮能绕一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动。
设计转向梯形的主要任务之一是确定转向梯型的最佳参数和进行强度计算。
一般转向梯形机构布置在前轴之后,但当发动机位置很低或前轴驱动时,也有位于前轴之前的。
转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
二、整体式转向梯形结构方案分析图5.1 整体式转向梯形1—转向横拉杆 2—转向梯形臂 3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图5.1所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
三、整体式转向梯形机构优化分析汽车转向行驶时,受弹性轮胎侧偏角的影响,所有车轮不是绕位于后轴沿长线上的点滚动,而是绕位于前轴和后轴之间的汽车内侧某一点滚动。
汽车转向梯形机构最佳方案的设计
K 0 —主动转臂两球头销中心的距离 Η与 Ε—任意位置专线梯形的底角 Η0 与 Ε0—中间位置转向梯形的底角 Α—内轮转角 Β—外轮转角 ΒL —理论外轮转角 ΒS—实际外轮转角 ∆—转向偏差
3 最佳方案的设计
最佳方案的设计用两步完成, 第一步: 用计算机 采用优选法确定最优区间。 第二步: 用计算机采用 公式法在最优区间内确定最佳方案。 如果只用公式 法, 计算太繁琐, 时间化费太长, 有的复杂问题要花 几十个小时, 才能出结果, 所以要用优选法确定最优 区间。 如果只采用优选法, 在变量多时有漏点的缺 点。优选法的结果并不是峰值、顶点。为了进一步提
x
3 i
x
y
2 i
i
i=
1至n
使实际特征线的斜率与理论特征线的斜率相差
最小,
即: ∆k= K (实) - K (理)
在偏差 ∆k 给定一个计算精度, 即可利用计算机 进行优化, 求出转向梯形机构各杠杆的尺寸和相应
的底角的数值系列, 从中选出最优杆件尺寸和底角
区间。
车辆转向梯形建模及优化设计教学教材

车辆转向梯形建模及优化设计车辆转向梯形建模及优化设计作者:刘燕斌陈晋荣赵陈闯来源:《科技风》2016年第18期摘要:汽车在运动的过程中,由于侧向力的作用和轮胎弹性侧偏的影响,转向系的内外车轮很难满足阿克曼转角关系,本文基于MATLAB的优化工具箱,通过对转向车轮几何运动的分析,推导出理论和实际内、外轮转向角之间的关系式,建立某一时刻下的实际转角与理论转角之差的数学表达式,并以此为优化目标,在相应的约束条件下,计算出车辆最佳的转向梯形参数。
关键词:转向系;MATLAB;优化;转向梯形转向系是用来保持或改变汽车行驶方向的机构,转向性能的好坏,对汽车的操纵稳定性有显著的影响,在转向系的设计中,无论采用的是整体式转向梯形还是断开式转向梯形,都应该满足汽车在转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,做无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径,转向轮应满足有足够大的转角。
[ 1 ]在传统的设计中,通常采用的是图解法和解析法进行设计,然而图解法的设计误差较大,而解析法的计算量大,这种方法不仅增加了研发成本,而且设计的精度也很难达到用户要求。
优化设计是20世纪60年代开始形成并迅速发展的一门新兴学科,它是以数学规划法为理论基础,以电子计算机为计算工具,寻求在满足规定的工作条件、载荷和工艺要求,并在强度、刚度、工艺、寿命、尺寸、范围以及其他一些技术要求的限制条件下,目标函数最优值的一种现代化设计方法。
[ 2 ]本文运用MATLAB优化工具箱相应的优化函数,以影响转向梯形对应的参数为设计变量,建立某一时刻下的实际转角与理论转角之差的数学表达式,并以此为优化目标,在相应的约束条件下,通过迭代运算,计算出车辆最佳的转向梯形参数,从而使外侧车轮实际转角和理论转角误差最小。
1整体式转向梯形的数学建模1.1阿克曼理论以及阿克曼转向特性汽车在直线行驶和转弯时,每一个车轮的轴线都应相较于后轴延长线上的某一点(转向中心),这样才能保证轮胎与地面间处于纯滚动而无滑动的现象。
汽车断开式转向梯形机构的优化设计
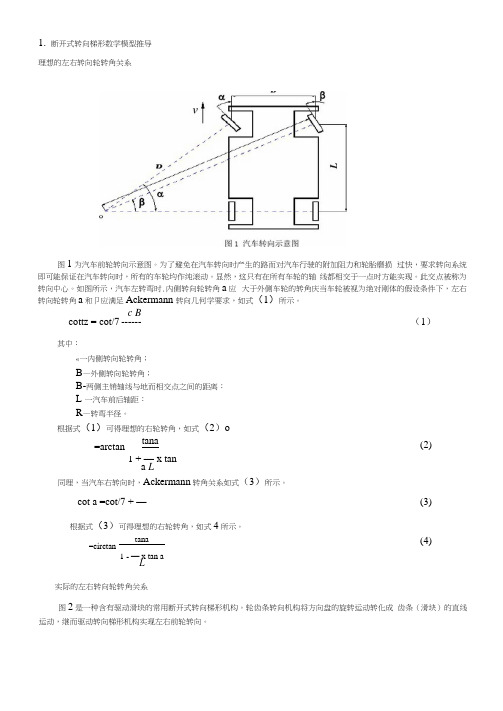
1.断开式转向梯形数学模型推导理想的左右转向轮转角关系图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路而对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时.内侧转向轮转角a应大于外侧车轮的转角庆当车轮被视为绝对刚体的假设条件下,左右转向轮转角a和卩应满足Ackermann 转向几何学要求,如式(1)所示。
c Bcottz = cot/7 ------ (1)其中:«一内侧转向轮转角;B—外侧转向轮转角;B-两侧主销轴线与地而相交点之间的距离:L 一汽车前后轴距:R—转弯半径。
根据式(1)可得理想的右轮转角,如式(2)otana (2) =arctan1 + — x tana L同理,当汽车右转向时,Ackermann转角关系如式(3)所示。
(3)cot a =cot/7 + —根据式(3)可得理想的右轮转角,如式4所示。
tana(4)=circtan1 - — x tan aL实际的左右转向轮转角关系图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
图中:厶一转向机齿条左右球较中心的距离;L 2 一左右横拉杆的长度;厶一左右转向节臂的长度:厶•一车轮中心至转向主销的距离:S] —转向齿条从中心位置向左的位移量: s 2 一转向齿条从中心位宜向左的位移量:y —转向齿条左右球狡中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值: S 。
一直线行驶时,转向齿条左球钱中心和左转向主销的水平距离:一转向节骨与汽车纵轴线的夹角。
运用余弦泄理和三角函数变换公式,经推导可得: ______________________-Cv - S xcos a = cos (ZAOB + Z.BOY )= 一;----- - ------------2厶(丁 +尸)A 点的坐标值为:v CxS-yx>jA 2 + B 2-C 2B2x (/+r )2*…Cxy + SxyjA 2 + B 2-C 2 沧=_ ------------- —zn ----------2x (/+S') 其中:A = -2LyxS,B = _2厶xy,C = 15,-1^-y 2-~s\ F —表示转向齿条弐球钱中心和左转向主销中心的实际距藹,对于直线行驶时,g = S 。
转向梯形
转向梯形一、转向系的设计应满足下列要求:1、保证汽车具有高的机动性;2、内、外轮转角间的匹配应保证当汽车转弯行驶时,全部车轮绕同一瞬时转向中心旋转,各车轮只有滚动而无侧滑。
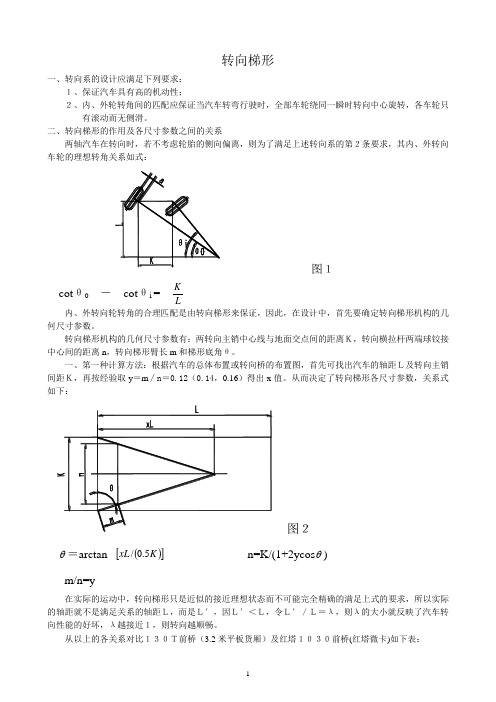
二、转向梯形的作用及各尺寸参数之间的关系两轴汽车在转向时,若不考虑轮胎的侧向偏离,则为了满足上述转向系的第2条要求,其内、外转向车轮的理想转角关系如式:图1cot θ0 - cot θi =LK 内、外转向轮转角的合理匹配是由转向梯形来保证,因此,在设计中,首先要确定转向梯形机构的几何尺寸参数。
转向梯形机构的几何尺寸参数有:两转向主销中心线与地面交点间的距离K,转向横拉杆两端球铰接中心间的距离n ,转向梯形臂长m 和梯形底角θ。
一、第一种计算方法:根据汽车的总体布置或转向桥的布置图,首先可找出汽车的轴距L及转向主销间距K,再按经验取y =m ∕n =0.12(0.14,0.16)得出x 值。
从而决定了转向梯形各尺寸参数,关系式如下:图2θ=arctan()[]K xL 5.0/n=K/(1+2ycos θ)m/n=y在实际的运动中,转向梯形只是近似的接近理想状态而不可能完全精确的满足上式的要求,所以实际的轴距就不是满足关系的轴距L,而是L′,因L′<L,令L′/L=λ,则λ的大小就反映了汽车转向性能的好坏,λ越接近1,则转向越顺畅。
从以上的各关系对比130T前桥(3.2米平板货厢)及红塔1030前桥(红塔微卡)如下表:前桥(配3.2米平板板厢车型)各尺寸参数严重不符合前桥转向机构的要求。
二、用另一种方法校核,一般经验值取:x=2/3m=(0.11-0.15)Kθ =arctanKL 34 可得到130T前桥和1030前桥各参数值为:从上表也可以得出,1030前桥各参数基本相符,而130T前桥各参数与经验数相差太多。
三、汽车的最小转弯半径m in R 是衡量汽车机动性的主要参数。
汽车的最小转弯半径m in R 与内外轮在最大转角max i θ与max 0θ、轴距L、主销距K及转向轮的转臂a (如图1所示)等尺寸有关。
汽车转向梯形机构设计中的参数定义

汽车转向梯形机构设计中的三大参数定义汽车转向梯形机构是现代汽车生产中用于转向控制的一种重要机构,其设计中有三大关键参数需要定义,分别是梯形臂长度、中心距和转向角。
首先,梯形臂长度是指梯形机构两个臂的长度差,它的大小直接关系到车辆的转向灵活性和稳定性。
一般来说,梯形臂长度越大,转向灵活性越高,但车辆稳定性可能会受到影响。
在设计中,需要根据车身尺寸和转向要求来确定梯形臂长度。
其次,中心距是指车轮中心到转向梯形机构中心的距离,也是一个重要的参数。
中心距的大小决定了车辆转向半径,过大过小都会影响到车辆的稳定性。
因此,在设计中需要根据车轮轴距和转向灵活性要求来确定中心距。
最后,转向角是指车轮转动一定角度时,转向臂的角度变化。
转向角大小决定了车轮的转向范围,也是影响车辆稳定性的重要因素。
需要在设计中考虑车辆的转向要求来确定转向角大小。
综上所述,梯形臂长度、中心距和转向角是汽车转向梯形机构设计中三大关键参数,需要针对车身尺寸、转向灵活性和稳定性要求来进行定义和计算。
只有合理的参数设计,才能保证汽车在不同路况下的安全性和舒适性。
汽车转向梯形优化设计
转向梯形机构优化设计课程设计题目:汽车转向梯形臂优化设计指导老师:郭朋彦华北水利水电大学转向梯形的优化设计.1. 向梯形机构概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32.整体式向梯形构方案分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3整体式向梯形机构化分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯4整体式向梯形程序写⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯7转动传动机构强度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯12转向梯形的优化结果⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13转向梯形结构设计图形⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13结论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯15;.转向梯形机构优化设计方案一、转向梯形机构概述转向梯形机构用来保证汽车转弯行驶时所有车轮能绕一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动。
设计转向梯形的主要任务之一是确定转向梯型的最正确参数和进行强度计算。
一般转向梯形机构布置在前轴之后,但当发动机位置很低或前轴驱动时,也有位于前轴之前的。
转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为到达总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
二、整体式转向梯形结构方案分析图整体式转向梯形;.1—转向横拉杆2—转向梯形臂3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造本钱低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干预,所以在布置上有困难。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Op i z to sg o t e i g Tr pe i m tmi a i n De i n fS e r n a z u
M e h nim fDo l -Fr nt Ax so a y Tr k c a s o ub e o - i n He v uc
Y N igln I in f A G H iyn H oL—e g A G Qn—og L a—e T N a—a g a i n — X -i - — f
( h i aigAuo bl o , t.Maa h n 2 3 61 An u Hu l tmo i C .Ld , n sa 4 0 ) n e
Absr t I t i pa r t se rn p i cpls f te i ta zum me h nim a e nr du e a d h mahe tc l t ac : n h s pe ,he te g rn i e o se rng r pe i i ca s r i to c d n te t mai a
高 , 证 了模 型 的正 确 性 与 实 用 性 。 验 关 键词 : 卡 ; 前桥 ; 向 梯 形机 构 ; 化设 计 重 双 转 优
中图 分 类 号 : 4 32 8 U 6 .1
文献 标 志 码 : A
文 章 编 号 :0 5 2 5 (0 2 0 — 0 9 0 10 — 5 0 2 1 )3 0 4 — 6
双前桥 转 向系统 是 一种 比较 先进 的转 向 系统 , 随着 目前高 端重 卡 向大马 力、 吨位 、 大 高舒适性 等 的
发 展 方 向 , 同 时 随 着 国 家 相 关 的 车 辆 交 通 法 规 的 实
达 到最 小 为 目标 函数 ,按 转 角范 围大小来 确定 加权
函 数 , 空 间 布 置 要 求 为 约 束 条 件 , 用 优 化 软 件 对 以 利
双 前桥 转 向系统参 数进行 优化 设计 。
施 ,双 前桥 转 向系统在 商用 车物流领 域 应用越 来越 普 遍 。但双 前桥汽 车在 实际 使用过 程 中普 遍存 在轮 胎 异常磨 损 、 向沉 重 、 时候 还 发 生摆振 等 问题 。 方 有
发 生 这 些 问题 的 关 键 原 因是 实 际 的 转 角 关 系 与 理 论 的 转 角 关 系 存 在 着 较 大 的 误 差 所 谓 的理 论 上 的转 角 关 系 就 是 符 合 阿 克 曼 转 向 原 理 的 汽 车 转 角 ,是 所 11 双 前 桥 转 向梯 形 的 模 型 假 设 . ( )假 设 车 辆 转 向和 行 驶 过 程 中 转 向 梯 形 一 直 1 保持在 同一 平面 内 :
重 卡双前桥转向 梯形机构的建 设计/ 模及 i1 . 9 9 .s .0 5 2 5 .0 .30 o: 3 6 4i n10 - 5 02 1 0 .1 0 s 2 3
设 讲 -磁 究
垦 国 黯国圆 规钧国酉留 腿
杨 青 龙 , 献 飞 , 海洋 , 立峰 李 汤 郝
( 徽 华 菱汽 车 有 限公 司 技 术 中 心 , 安 马鞍 山 2 3 61 40
摘
要 : 绍 了 转 向梯 形 机 构 的 转 向原 理 , 现 有 的 条 件 下 运用 双 前 桥 转 向 系统 的转 向特 性 , 立 转 向梯 形机 构 的数 介 在 建
学 模 型 。 最 后 针 对 某 实 车 的双 前 桥 转 向梯 形 机 构 , A A 用 D MS软 件 进 行 了仿 真 优 化 , 转 向梯 形 机 构 的性 能 得 到 提 使
mo e o p i z t n d sg fs e i g ta e i m c a im s s tu y s a e g o t a u e a e n t e if — d l fo t mia i e in o t rn r p zu me h ns i e p b p c e mer me s r s b s d o h n u o e y l e e ff n h e a in n s i al i d a h t e n r p zu me h n s o o b e f n — x s o e t i e v n e o r tw e l l me t. n l a me t e se r g ta e i m c a i o g F y t i m fd u l — r t a i n c ran h a y o
o ih h sb e mp o e r mi e t i o ' t e sa d p a t a i t stse n e i e . f whc a e n i r v d p o n nl t e ne n s n rc i b l y i e td a d v r id y, s e c i f Ke r s h a y t c d u l — r n - x s te i g t p z m c a im ; p i z t n d s n y wo d : e v k; o b e fo ta i ;s rn a e i me h n s o t a r e r u miai e i o g
tuc he p o r m fo tmiai n b he fnci n o ptmiai n t ob x i r k t r g a o p i z to y t u to fo i z to o l o n ADAM S s fwa e i o p ld.he pefr n e ot r s c m ie T ro ma c