固定摄像下的运动车辆检测与跟踪
《2024年基于光流法的运动目标检测与跟踪技术》范文

《基于光流法的运动目标检测与跟踪技术》篇一一、引言随着计算机视觉技术的不断发展,运动目标检测与跟踪技术在智能监控、自动驾驶、人机交互等领域得到了广泛应用。
其中,光流法作为一种重要的运动目标检测与跟踪技术,因其能够实时准确地估计运动目标的运动状态而备受关注。
本文将详细介绍基于光流法的运动目标检测与跟踪技术,包括其基本原理、实现方法、应用场景及挑战。
二、光流法基本原理光流是指图像序列中亮度模式在时间上的变化。
光流法的基本思想是通过计算像素点的速度场(即光流)来检测和跟踪运动目标。
在连续的图像帧中,如果某个像素点在相邻帧之间发生了位移,那么这个像素点就构成了运动目标的特征点。
通过计算这些特征点的运动轨迹,可以实现对运动目标的检测与跟踪。
三、光流法的实现方法1. 稠密光流法:稠密光流法通过计算图像中每个像素点的光流来获取运动信息。
这种方法能够获取较为丰富的运动信息,但计算量较大,实时性较差。
2. 稀疏光流法:稀疏光流法只计算部分特征点的光流,如角点、边缘等。
这种方法计算量较小,能够提高实时性,但丢失了部分运动信息。
3. 基于匹配的光流法:该方法通过在相邻帧之间进行特征匹配来估计光流。
常用的匹配方法包括基于区域的方法、基于模板的方法等。
这种方法能够有效地提取和跟踪运动目标,但需要较高的计算资源和时间。
四、基于光流法的运动目标检测与跟踪技术1. 运动目标检测:通过计算图像序列中像素点的光流,可以检测出运动目标的轨迹和位置信息。
在检测过程中,可以利用阈值等方法对光流进行滤波和去噪,以提高检测的准确性。
2. 运动目标跟踪:在检测出运动目标后,可以利用光流法对目标进行跟踪。
通过计算目标在相邻帧之间的位移和速度等信息,可以实现对目标的实时跟踪和轨迹预测。
五、应用场景及挑战1. 应用场景:基于光流法的运动目标检测与跟踪技术广泛应用于智能监控、自动驾驶、人机交互等领域。
例如,在智能监控中,可以通过该技术实现对异常行为的检测和报警;在自动驾驶中,可以通过该技术实现对车辆和行人的识别和跟踪;在人机交互中,可以通过该技术实现自然的人机交互方式。
基于视频图像的车速检测方法分析
基于视频图像的车速检测方法分析摘要:行车速度检测在交通事故识别过程中非常重要。
以往的行车速度计算方式只可以测量车辆碰撞时的速度。
碰撞发生前,驾驶员采取制动措施降低车速,造成实测车速偏低,影响事故认定结果。
因此,本文主要研究基于视频图像的车速检测方法,能够准确地测量出碰撞前的车速,为交通事故识别提供依据。
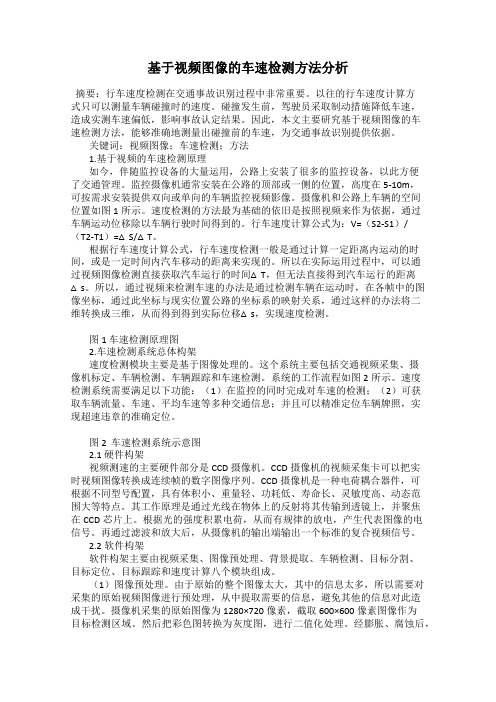
关键词:视频图像;车速检测;方法1.基于视频的车速检测原理如今,伴随监控设备的大量运用,公路上安装了很多的监控设备,以此方便了交通管理。
监控摄像机通常安装在公路的顶部或一侧的位置,高度在5-10m,可按需求安装提供双向或单向的车辆监控视频影像。
摄像机和公路上车辆的空间位置如图1所示。
速度检测的方法最为基础的依旧是按照视频来作为依据,通过车辆运动位移除以车辆行驶时间得到的。
行车速度计算公式为:V=(S2-S1)/(T2-T1)=△S/△T。
根据行车速度计算公式,行车速度检测一般是通过计算一定距离内运动的时间,或是一定时间内汽车移动的距离来实现的。
所以在实际运用过程中,可以通过视频图像检测直接获取汽车运行的时间△T,但无法直接得到汽车运行的距离△s。
所以,通过视频来检测车速的办法是通过检测车辆在运动时,在各帧中的图像坐标,通过此坐标与现实位置公路的坐标系的映射关系,通过这样的办法将二维转换成三维,从而得到得到实际位移△s,实现速度检测。
图1 车速检测原理图2.车速检测系统总体构架速度检测模块主要是基于图像处理的。
这个系统主要包括交通视频采集、摄像机标定、车辆检测、车辆跟踪和车速检测。
系统的工作流程如图2所示。
速度检测系统需要满足以下功能:(1)在监控的同时完成对车速的检测;(2)可获取车辆流量、车速、平均车速等多种交通信息;并且可以精准定位车辆牌照,实现超速违章的准确定位。
图2 车速检测系统示意图2.1 硬件构架视频测速的主要硬件部分是CCD摄像机。
CCD摄像机的视频采集卡可以把实时视频图像转换成连续帧的数字图像序列。
如何利用AI技术进行智能车辆管理与控制
如何利用AI技术进行智能车辆管理与控制智能车辆管理与控制是近年来AI技术在交通运输领域的一个重要应用方向。
通过利用AI技术,可以实现对车辆的实时监测、管理和控制,提高交通运输的安全性、效率和便捷性。
在这篇文章中,我们将探讨如何利用AI技术进行智能车辆管理与控制。
一、智能车辆监测与识别1.1 基于图像处理的车辆检测与跟踪利用AI技术中的图像处理方法,可以对交通摄像头拍摄到的场景进行分析和处理,从而实现对道路上行驶的车辆进行检测和跟踪。
通过识别出车辆的位置、大小和速度等信息,可以为后续的交通管理决策提供基础数据。
1.2 基于传感器数据的车辆状态监控除了图像处理外,还可以利用传感器数据来监测和判断车辆状态。
例如,通过加速度传感器、陀螺仪等装置获取车辆加速度、转向角等信息,并结合机器学习算法对异常驾驶行为进行识别和预警。
二、智能车辆路线规划与优化2.1 基于历史数据的交通流预测AI技术可以利用历史交通数据和实时交通信息,进行交通流量的预测。
通过分析过去的车辆行驶数据以及当前道路状况,可以准确地预测出未来一段时间内各个路段的交通情况,为车辆导航系统提供更加准确的路线规划。
2.2 基于优化算法的车辆调度与路径选择利用AI中的优化算法,可以对车辆进行合理调度和路径选择。
例如,在城市物流配送中,通过考虑不同货物之间的关系、车辆容量限制等因素,将配送任务进行合理分配和路径规划,降低运输成本并提高效率。
三、智能车辆安全监控与应急管理3.1 基于行为识别的驾驶员监控通过AI技术中的行为识别算法,结合摄像头拍摄到的驾驶员行为特征,可以对驾驶员状态进行实时监测。
例如,识别出疲劳驾驶、注意力不集中等异常行为,并及时发出警告或采取其他措施保障交通安全。
3.2 基于智能传感器的车辆安全检测利用智能传感器可以对车辆进行实时安全检测。
例如,通过检测车辆的刹车距离、油门踏板位置等指标,及时判断车辆的驾驶状态和制动性能,并提供预警信息。
基于OpenMV摄像头的运动目标控制与自动追踪系统设计与实现
基于OpenMV摄像头的运动目标控制与自动追踪系统设计与实现目录一、内容概括 (2)1.1 研究背景 (3)1.2 研究目的与意义 (4)1.3 国内外研究现状及发展动态 (5)二、相关工作与技术基础 (6)2.1 OpenMV摄像头介绍 (8)2.2 目标检测与跟踪算法概述 (9)2.3 控制系统设计基础 (10)三、系统设计与实现 (12)3.1 系统总体架构设计 (13)3.2 图像采集模块设计 (15)3.3 目标检测与跟踪模块设计 (16)3.4 控制模块设计 (18)3.5 执行机构设计与实现 (19)四、实验与测试 (21)4.1 实验环境搭建 (22)4.2 实验方法与步骤 (23)4.3 实验结果与分析 (25)4.4 系统优化与改进 (26)五、总结与展望 (28)5.1 研究成果总结 (29)5.2 存在的不足与局限性 (30)5.3 对未来工作的展望 (32)一、内容概括本文档主要围绕基于OpenMV摄像头的运动目标控制与自动追踪系统的设计与实现展开。
介绍了OpenMV摄像头的基本原理和功能,以及其在运动目标检测与追踪领域的应用前景。
系统阐述了设计思路与方法,包括硬件选型、软件架构设计、运动目标检测算法选择及实现等关键环节。
在硬件选型部分,我们选用了具备较高性能的OpenMV摄像头,并配置了相应的驱动程序,以确保其稳定运行。
在软件架构上,我们采用了分层设计思想,将系统划分为前端图像采集、中端图像处理与目标检测、后端控制与执行三个层次,以实现各模块之间的高效协同。
在运动目标检测方面,我们重点研究了基于OpenCV的运动目标检测算法,通过优化算法参数和提高计算效率,实现了对运动目标的快速准确检测。
我们还探讨了如何利用深度学习技术来进一步提升检测精度和鲁棒性。
在控制与追踪策略方面,我们根据运动目标的速度、方向等特性,设计了相应的PID控制器和模糊控制算法,以实现对摄像头的精确控制和稳定追踪。
运动目标检测和跟踪的研究及应用

在人所感知到的环境信息中,视觉信息占了非常大的比重,其中动态视觉信息更是其主要组成部分.感知环境中的这些动态视觉信息已成为计算机视觉的一个重要的研究方向.运动目标检测与跟踪是应用视觉和运动图像编码研究领域的一个重要课题,在许多领域有着广泛的应用. 本文主要研究了基于DSP的运动目标检测与跟踪问题,包括硬件平台的构建和运动检测跟踪算法软件设计与实现. 在运动目标检测部分,介绍了现有的几种常用的检测算法,针对传统帧差算法,检测出的运动目标不够完整的缺点,进行了改进;针对传统的背景重建算法运算量大,耗时的缺点,提出基于块的背景重建,均通过实验验证了方法的有效性. 在运动目标跟踪部分,首先介绍了Kalman滤波的基本原理,在此基础上提出了基于Kalman滤波的跟踪算法;然后详细分析了本文目标跟踪系统所采用的波门算法,为后面系统的实现打下了理论基础. 详细介绍了基于DAM6416P图像处理平台的跟踪系统的实现, 整个系统工作过程为DSP先对采集到的图像进行预处理,然后采用帧差法检测运动目标,接着采用基于双波门算法根据目标的质心位置来判断是否移动云台以及云台移动方向,从而实现对运动目标的实时跟踪. 从实验数据与结果看,本文研究的跟踪系统在一定条件下能够准确、及时地检测跟踪目标,达到了预期效果.
2.学位论文何西华视频运动目标检测与跟踪算法研究2008
视频环境的运动目标检测与跟踪是当前计算机视觉研究中一个非常活跃的领域。计算机视觉研究的目标是使计算机具有通过一幅或多幅图像认知周围环境信息的能力。运动图像序列中包含了比静态图像更多的有用信息。运动对象的检测与提取,是将视频图像序列划分成若干的运动对象,并在时间轴上对这些运动对象进行跟踪,为以后的研究工作奠定基础,如基于对象的编码技术以及基于内容的视频检索等。目标跟踪则是随着数字视频技术的发展及应用而产生的一个新的研究课题,其在军事以及民用等诸多领域中有着广泛的应用。 本文主要研究了基于视频序列运动目标检测与跟踪的基本理论和关键技术。重点研究背景模型下运动目标的检测和提取,运动目标阴影的处理,以及运动目标跟踪等方面的内容。 论文首先对的相关背景知识作了介绍。其中包括目标检测与跟踪系统中采用的运动约束假设和外部环境约束假设;目标检测技术采用的主要算法,包括静态图像中的目标检测和运动目标检测;目标跟踪基础知识,包括跟踪的基本概念,目标的常用的四种表示方法等。 在运动目标检测研究方面,首先介绍了当前主要目标检测和提取算法的原理,通过试验对帧间差分法和自适应背景相减法进行分析。在此基础上提出将背景减除与帧间差分方法结合的目标检测算法。实验表明,该方法能够在较大程度上满足系统的要求,提高检测结果精度。针对阴影对目标检测造成的不利影响,最后本论文还总结了目标抑制阴影的几种算法。 在运动目标跟踪研究方面,首先归纳了在目标跟踪中常被采用的视觉特征、统计特征、变换系数特征和代数特征;分析了目标的三种线性运动模型;阐述了目标特征搜索匹配的主要算法,并重点研究了基于目标颜色直方图特征的均值偏移目标跟踪算法(Mean-ShiftAlgorithm),在此基础上提出了一种联合目标位置预测的改进的跟踪算法,通过对均值偏移算法和改进的跟踪算法通过的分析和实验比较,表明本论文的改进跟踪算法较均值偏移跟踪算法由于利用了目标的空间位置信息,提高了目标跟踪的可靠性和有效性。
基于摄像机运动控制的实时对象检测与跟踪算法

【 y wod 】vdo srel ne o — aa er enld ni smao ;C m h l rh ;K h a l r Ke r s ie uviac;nn p rm tck re esy et t n a S i agi m ann ft l i t i i l f ot ie
c me a c n r 1 l n f tr i n r d c d t r d c h v n n o main a r o to.a Kama l s to u e o p e it t e mo i g if r t .T e e p r n a e u t wi o y Z 5 n t c m— ie i o h x e me tl r s l t S n R 2 e a i s h e a s o h t t i a g rt m s r b s a d e ce t r h w t a h s l o i h i o u t n f in . i
Ba e i Ca e a M o e n n r l sd Ol m r v me t Co t o
GU in d ng I Z i ,ZHANG ha — a g Ja — o ,L U h Z o yn
h o o o ol f C mmu i t n ad I omai n ier g h nhiU iesy hn hi2 0 7,C ia nc i n n r t n E gnei ,S ag o nvri ,S ag a 0 0 2 hn ) ao f o n t
1 引 言
近 年 来 , 一 代 智 能 视 频 监 控 技 术 的研 究 逐 渐 受 到 新
了单 个 摄 像 机 的跟 踪 监 控 能 力 。
2 算 法 描 述
基于视频的车辆检测与跟踪技术发展研究
基 于视频 的车辆检测 与跟踪技术发展研究
赵 凌
( 沈 阳理 工 大 学 , 沈阳 1 1 0 1 6 8 )
摘要 : 当前 基 于视 频 的车 辆 检 测 器 应 用 十 分 广 泛 , 尤其是在智能交通系统领域。 介 绍 现 有 基 于 视 频 的 车辆 检 测 及 跟 踪 技 术 的 特 点 . 对 比各 种 检 测 方 法 的适 用 范 围及 优 缺 点 , 探 讨 该 领 域 尚存 的部 分 问题 , 并 预 测其 未来 的研 究 发 展 方 向 。 关键词 : 车辆检测 ; 跟踪 ; 智能交通系统 ; 视频 ; 背 景
在 较 为理想 的环 境 中 . 光 流场法 可 以检测 独 立运
1 基 于视 频 的 车 辆 检 测 技 术
车 辆检 测 的作用 是判 断有 无 车辆驶 过 检测 区域 , 同时一对 一 进行 跟踪 , 获 得车 流量 等参 数 。提 高车 辆 检 测算法 的实时 性与 减小 计算 量是 矛盾 的 , 但二 者 有 助 于增 强检 测 系统 的稳定 性 、 精确 性 。在具 体 检测 过 程 中, 背 景变 化 、 其 他 车辆 干 扰 、 车辆 自身 影 子 、 摄 像 机 不稳 定 等 因 素均 会 对 车辆 检 测 与 分 割 的准 确 性 造
1 . 3 背 景 差 法
背景 差 法是把 部分 图像 当成 背景 图像 . 再用 后 面
获得 的序 列 图像 当前 帧减去 事先 选取 的背 景 图像 . 实
环境 、 算法 简单 、 检 测 时间短 、 准 确性 高 、 实用 性强 。 其
缺点 是不 能检 测行 驶速 度过 慢 或者静 止 不动 的车 辆 。
动 的物 体 ,不必 知道 场景 信息 就能 够算 出物 体速 度 . 还 可 以用摄 像机 记 录物体 的运 动过 程 。 此种 方法 的缺 点为 : 在 无 物体 运 动 时 . 如果 有 光 照 也 可 以检 测 到光
基于双目视觉的车辆检测跟踪与测距
第13卷㊀第4期Vol.13No.4㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2023年4月㊀Apr.2023㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2023)04-0147-05中图分类号:TP389.1文献标志码:A基于双目视觉的车辆检测跟踪与测距郭鹏宇(上海工程技术大学机械与汽车工程学院,上海201620)摘㊀要:由于道路上存在各种不安全因素,车辆检测跟踪并测距是自动驾驶技术的重要组成部分㊂本文将YOLOv4-tiny作为检测器使之加快模型检测速度且更适合在车辆嵌入式设备中使用㊂考虑到目标检测失败的情况,本文在历史缓冲区中存储以前的跟踪细节(唯一ID)和每个对象的相应标签,提出了一个基于中值的标签估计方案(MLP),使用存储在前一帧的历史标签的中值来预测当前帧中对象的检测标签,使得跟踪错误最小化,并用双目摄像头获取图像检测车辆距离㊂测试新网络结构后,检测精度(MeanAveragePrecision,mAP)为80.14%,检测速度较YOLOv4相比提高了184%,检测到的距离误差平均在0.5%左右㊂关键词:YOLOv4-tiny;目标跟踪;中值算法;双目测距Vehicledetection,trackingandrangingbasedonbinocularvisionGUOPengyu(SchoolofMechanicalandAutomotiveEngineering,ShanghaiUniversityofEngineeringScience,Shanghai201620,China)ʌAbstractɔDuetovariousunsafefactorsontheroad,vehicledetection,trackingandrangingaretheimportantpartofautomaticdrivingtechnology.Inthispaper,YOLOv4-tinyisusedasadetectortospeedupmodeldetectionandismoresuitableforvehicleembeddeddevices.Consideringthefailureofobjectdetection,thispaperstorestheprevioustrackingdetails(uniqueID)andthecorrespondinglabelofeachobjectinthehistorybuffer,andproposesamedium-basedlabelestimationscheme(MLP),whichusesthemedianvalueofthehistorylabelstoredinthepreviousframetopredictthedetectionlabeloftheobjectinthecurrentframe,sothattrackingerrorsareminimized.Theimagesobtainedbybinocularcameraareusedtodetectvehicledistance.Aftertestingthenewnetworkstructure,thedetectionaccuracy(MeanAveragePrecision,mAP)is80.14%,thedetectionspeedis184%higherthanthatofYOLOv4,andthedetecteddistanceerrorisabout0.5%onaverage.ʌKeywordsɔYOLOv4-tiny;targettracking;medianalgorithm;binoculardistancemeasurement作者简介:郭鹏宇(1995-),女,硕士研究生,主要研究方向:智能网联汽车㊂收稿日期:2022-05-240㊀引㊀言在自动驾驶辅助系统中,基于传感器,采用车辆检测㊁跟踪㊁测距等一系列计算机视觉算法进行环境感知,辅助系统就能得到车辆周围信息,以保证驾驶员安全驾驶㊂基于视觉的车辆检测及测距系统主要应用在道路交通场景下,用于辅助检测前方目标以及进行距离预警,其性能好坏主要依赖于采用的车辆检测算法㊂目前,在使用相机进行目标检测时,多采用传统的机器视觉检测方法㊂对于前方车辆目标,该方法首先根据车辆的局部特征,如阴影㊁边缘纹理㊁颜色分布等特征生成感兴趣区域;然后利用对称特征等整体特征对感兴趣区域进行验证㊂在从产生感兴趣区域到验证感兴趣区域的过程中,为了达到实时检测的要求,一般需要对图像进行灰度化,并对灰度化后的图像进行阴影分割和边缘分析㊂因此,对于相机获得的图像,传统的机器视觉的车辆检测方法通常找到感兴趣区域的车辆的特点和梯度直方图特征(HOG[1]),SIFT[2]特征或Haar-like[3]特征通常用于获得前面的假设检验区域车辆,即ROI区域;此后用这些特征训练SVM[4]或Adaboost[5]车辆检测分类器,计算车辆图像的特征值,并根据车辆特征值的大小与前方车辆进行判断,得到前车的假设测试区域验证,完成对前车的检测㊂而上述传统的机器视觉检测方法本质上是通过人工选择特征进行识别和分类㊂在复杂场景中,人工特征的数量会呈几何级数增长,这对前面车辆的识别率也有很大的影响㊂这种方法更适合在某种特定场景下的车辆识别,因为其数据规模并不大,泛化能力则较差,很难实现快速和准确的复杂应用场景的检测㊂近年来,随着卷积神经网络(CNN)的应用,出现了许多算法㊂一阶段方法包括SSD[6]㊁YOLO系列[7-8]㊁RetinaNet[9]㊂两阶段方法包括FastR-CNN[10]和FasterR-CNN[11]㊂最近提出的最先进的YOLO-v4[12]具有很高的检测精度和检测速度㊂目前,对于多目标车辆轨迹跟踪技术主要可分为两大类㊂一类是传统方法,如利用背景差分法㊁帧差法㊁光流法等方法提取运动目标,传统方法部署方便,资源消耗低,但受先验知识限制,跟踪稳定性差,准确性不高㊂另一类是基于卷积神经网络的㊁称为深度学习的方法,深度学习方法可以学习更多的目标特征,能在连续的视频帧中检测出目标对象㊂深度学习方法精度高,但其计算量较大,实时性不高,因此,基于视频跟踪的车辆检测算法仍需改进㊂研究可知,基于视觉相机的测距方法主要有单目测距和双目测距两种㊂这2种方法的共同特点是通过相机采集图像数据,随后从图像数据中得到距离信息㊂单目检测方法的优点是成本低,缺点是对检测精度的依赖过大㊂此外,从实用的角度来看,在汽车上安装单目相机时,由于汽车的颠簸,汽车的俯仰角经常发生变化,导致精度显著下降㊂双目测距的方法是通过计算2幅图像的视差直接测量距离㊂1㊀车辆检测与跟踪本文使用的目标检测算法是YOLOv4-tiny,其中YOLO表示YouOnlyLookOnce,由Bochkovskiy等学者开发㊂YOLOv4-tiny是YOLOv4的压缩版本,虽在平均精度方面受到了影响,但却可以在低计算能力下高效运行㊂与未压缩版本的4个YOLO头相比,YOLOv4-tiny只使用了2个YOLO头,并使用了29个预训练卷积层作为基础㊂YOLO各变量参数设置见表1,卷积层各变量参数设置见表2㊂㊀㊀上一代YOLO的非maxpool抑制(NMS)等遗留特性和一些新特性㊁包括加权剩余连接(WRC)㊁Mosaic数据增强在内有效提高了算法在模糊图像中识别类的能力,降低了识别类所需的处理能力㊂YOLOv4-tiny提供了较高的帧率,同时具有中间地带平均精度与常用模型并列㊂在本文中,使用YOLOv4-tiny算法作为车辆的检测器,并且使用DeepSORT[13]算法作为初始车辆跟踪器㊂表1㊀YOLO各变量参数设置Tab.1㊀YOLOparametersettingsYOLO变量参数Mask0,1,2anchors10,14,㊀23,27㊀37,58㊀81,82㊀135,169㊀344,319classes4num6jitter0.3scale_x_y1.05cls_normalizer1.0iou_lossciouignore_thresh0.7truth_thresh1random0Resize1.5nms_kindgreedynmsbeta_nms0.6表2㊀卷积层各变量参数设置Tab.2㊀Theconvolutionlayerparametersettings卷积层变量参数batch_normalize1filters64size3stride2pad1activationleaky㊀㊀图1显示了2个ID及其前3个标签㊂对于ID#137的车辆,本文方法预测的标签用加黑来标记㊂[1255,739,1421,856][960,719,1006,758]车辆I D 137[1255,739,1421,859][955,721,1006,758][1255,739,1421,856][952,722,1006,758]目标检测标签1图1㊀应用MLP后的历史缓冲区示例图Fig.1㊀AhistorybufferexampleafterapplyingMLP841智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀㊀㊀本文使用历史缓冲区来调整和改进每个检测标签的视觉质量和在帧中的显示㊂如果有任何车辆检测标签缺失,那么本文的MLP为该车辆生产一个估计的检测标签㊂延时使用一系列的检测标签前存储在历史缓冲区来预测未检测到车辆的检测标签ID在给定的框架(见图1)㊂条件估计为特定车辆检测标签,标签ID应该至少在2个连续帧出现㊂为了预测缺失的检测标签,本文对当前帧t应用以下公式:Ñ=l(t-1)(i)-l(t-2)(i)(1)l(t)(i)=l(t-1)(i)+Ñ(2)㊀㊀这里,lxmin,ymin,xmax,ymax()表示每个车辆ID基于调整边界框标签的中值,Ñ表示边界框位置的变化从时间戳(t-2)到(t-1);i表示每辆车唯一的ID㊂2㊀双目测距双目视差示意如图2所示㊂由图2可知,2个摄像头的中心距是B,两个摄像头观察同一点P,P1的坐标为(X1,Y1),P2的坐标为(X2,Y2),由于2台相机始终是平行的,高度相同,所以在左右2张图像中P点的Y坐标是相同的,在X方向上存在视差㊂因此,可以通过标定相机内外参数来确定图像坐标与世界坐标之间的关系㊂双目视差原理如图3所示㊂PZ 2X 2P 2Z 1P 1O 2Y 2Y 1BC 2X 1O 1C 1x 1y 1y 2x 2图2㊀双目视差示意图Fig.2㊀SchematicdiagramofbinocularparallaxdfB aP RC RA RbP LX LX RPC LA L图3㊀双目视差原理图Fig.3㊀Principleofbinocularparallax㊀㊀图3中,CL和CR是2个摄像头的光学中心,摄像头之间的距离是b,相机的焦距为f,P点在左右图像的投影点为PlXl,Yl(),PrXr,Yr(),AL,PL=XL,AR,PR=XR,PR,B=a,从三角形相似关系可知:d-fd=aa+xRd-fd=b-xL+xR+ab+xR+a(3)㊀㊀由式(3)可知:a=bxRxL-xR-xR(4)㊀㊀由此,空间中P点到相机的距离为:d=fa+xRxR=bfxL-xR(5)㊀㊀P在相机坐标系中的三维坐标可以由几何关系得到:X=bxLxL-xRY=byxL-xRZ=bfᶄxL-xMìîíïïïïïïïï(6)㊀㊀对于车辆的测距,本文取检测到的边界框内每辆车的中心来表示被检测物体到双目相机中心的距离㊂3㊀实验结果与分析将YOLOv4-tiny与其他常用的目标检测算法进行比较,将其mAP与FPS进行比较,得到表3中的结果㊂本文提出的车辆检测与跟踪方法使用了TensorFlow库和基于YOLOv4-tiny模型的DeepSORT算法㊂经综合比较,使用YOLOv4-tiny的精度和检测速度是可以接受的,精度比YOLOv3-tiny高,速度比YOLOv4的方法更快㊂YOLOv4-tiny模型检测车辆效果如图4所示㊂表3㊀各模型帧率和mAP对比Tab.3㊀FramerateandmAPcomparison模型mAP/%帧率(FPS)YOLOv485.0814.12YOLOv4-tiny80.1440.11YOLOv383.3216.99YOLOv3-tiny69.0352.77941第4期郭鹏宇:基于双目视觉的车辆检测跟踪与测距图4㊀YOLOv4-tiny模型检测车辆效果Fig.4㊀CarsvideodetectionusingYOLOv4-tinymodel㊀㊀使用本文方法前后汽车的标签变化曲线如图5所示㊂对于ID#39的车辆,图5(a)是使用方法前,图5(b)是使用本文方法后,相同的汽车标签变得更加平滑㊂X (b o u n d i n g b o x 的中心)100200300400500600700800730720710700690680670Y (b o u n d i n g b o x 的中心)(a)使用本文方法前100200300400500600700800730720710700690680670X (b o u n d i n g b o x 的中心)Y (b o u n d i n g b o x 的中心)(b)使用本文方法后图5㊀使用本文方法前后汽车的标签变化Fig.5㊀Thelabelchangesbeforeandafterusingthemethodinthispaper㊀㊀在目标跟踪时,从历史缓冲区中预测缺失标签的方法往往会产生不好的结果,因为对象检测器的可视化结果经常显示不稳定和闪烁的边框标签㊂在应用本文的基于中值的算法后,可以得到高度稳定的标签㊂因此,本文方法提高了目标检测器的视觉性能,并为目标检测器和跟踪器提供了对缺失标签的更好估计㊂利用双目相机取检测到的边界框内每辆车的中心来表示被检测物体到双目相机中心的距离㊂仿真测试结果见表4㊂从距离测试的结果来看,测试精度相对较高,基本保持在0.5% 0.6%之间㊂表4㊀测量结果分析Tab.4㊀Themeasuredresultsanalysis实验组数测量距离/cm实际距离/cm误差/%11567.001559.110.503521655.001646.140.535331738.001729.160.508641893.001883.170.519351983.001971.200.595162236.002223.220.571672489.002475.260.55204㊀结束语本文介绍了一种用于自动驾驶的实时检测跟踪与测距系统㊂通过本文提出的实时同步方法,该系统方便了车辆实时同步检测;利用双目摄像头,YOLOv4-tiny和DeepSORT算法对车辆进行检测和跟踪,并提出中值标签预测方法优化跟踪效果,同时实现了对前方车辆的精确测距㊂整个系统在检测和测距方面取得了较高的精度和实时性㊂对于自动驾驶的应用,该系统可以结合许多智能技术,如目标预警㊁自动避障等㊂与此同时,该系统还有很大的改进空间㊂在检测方面,通过优化算法提高检测性能,通过训练更多类型的物体,如行人㊁非机动车等,为自动驾驶提供更多的道路信息㊂在这个系统中,测距是指从双目相机的中心到物体的距离㊂在实际情况下,车辆的具体位置到物体的距离可以根据相机的安装位置和车辆的实际长度来计算㊂通过优化双目测距算法,可以提高测距精度㊂参考文献[1]TAIGMANY,YANGMing,RANZATOMA,etal.DeepFace:Closingthegaptohuman-levelperformanceinfaceverification[C]//2014IEEEConferenceonComputerVisionandPatternRecognition.Columbus,OH,USA:IEEE,2014:1701-1708.[2]MAXiaoxu,GRIMSONWEL.Grimson.Edge-basedrichrepresentationforvehicleclassification[C]//TenthIEEEInternationalConferenceonComputerVision.Beijing:IEEE,2005:1185-1192.[3]XUQing,GAOFeng,XUGuoyan.Analgorithmforfront-vehicledetectionbasedonHaar-likefeature[J].AutomotiveEngineering,2013,35(4):381-384.(下转第157页)051智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀参考文献[1]SHIJianping,TAOXin,XULi,etal.Breakamesroomillusion:depthfromgeneralsingleimages[J].ACMTransactionsonGraphics(TOG),2015,34(6):1-11.[2]YANGDong,QINShiyin,Restorationofdegradedimagewithpartialblurredregionsbasedonblurdetectionandclassification[C]//IEEEInternationalConferenceonMechatronicsandAutomation.Beijing,China:IEEE,2015:2414–2419.[3]ABBATEA,ARENAR,ABOUZAKIN,etal.Heartfailurewithpreservedejectionfraction:refocusingondiastole[J].InternationalJournalofCardiology,2015,179:430-440.[4]LYUW,LUWei,MAMing.No-referencequalitymetricforcontrast-distortedimagebasedongradientdomainandHSVspace[J].JournalofVisualCommunicationandImageRepresentation,2020,69:102797.[5]YIXin,ERAMIANM.LBP-basedsegmentationofdefocusblur[J].IEEETransactionsonImageProcessing,2016,25(4):1626-1638.[6]GOLESTANEHSA,KARAMLJ.Spatially-varyingblurdetectionbasedonmultiscalefusedandsortedtransformcoefficientsofgradientmagnitudes[C]//IEEEConferenceonComputerVisionandPatternRecognition(CVPR).Honolulu,Hawaii:IEEE,2017:596-605.[7]SUBolan,LUShijian,TANCL.Blurredimageregiondetectionandclassification[C]//Proceedingsofthe19thACMinternationalconferenceonMultimedia.ScottsdaleArizona,USA:ACM,2011:1397-1400.[8]SHIJianping,XULi,JIAJiaya.Discriminativeblurdetectionfeatures[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition.Columbus,USA:IEEE,2014:2965-2972.[9]TANGChang,WUJin,HOUYonghong,etal.Aspectralandspatialapproachofcoarse-to-fineblurredimageregiondetection[J].IEEESignalProcessingLetters,2016,23(11):1652-1656.[10]王雪玮.基于特征学习的模糊图像质量评价与检测分割研究[D].合肥:中国科学技术大学,2020.[11]CHENQifeng,LIDingzeyu,TANGCK,etal.KNNMatting[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,2013,35(9):2175-2188.[12]OJALAT,PIETIKAINENM,MAENPAAT.Multiresolutiongray-scaleandrotationinvarianttextureclassificationwithlocalbinarypatterns[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2002,24(7):971-987.[13]ACHANTAR,SHAJIA,SMITHK,etal.SLICsuperpixelscomparedtostate-of-the-artsuperpixelmethods[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2012,34(11):2274-2282.[14]WANGJingdong,JIANGHuaizu,YUANZejian,etal.Salientobjectdetection:Adiscriminativeregionalfeatureintegrationapproach[J].InternationalJournalofComputerVision,2017,123:251-268.[15]ZHAOMinghua,LIDan,SHIZhenghao,etal.BlurfeatureextractionplusautomaticKNNmatting:Anoveltwostageblurregiondetectionmethodforlocalmotionblurredimages[J].IEEEAccess,2019,7:181142-181151.[16]OTSUN.Athresholdselectionmethodfromgray-levelhistograms[J].IEEETransactionsonSystems,Man,andCybernetics,1979,9(1):62-66.[17]GASTALESL,OLIVEIRAMM.Domaintransformforedge-awareimageandvideoprocessing[J].Eurographics,2010,29(2):753-762.(上接第150页)[4]KAZEMIFM,SAMADIS,POORREZAHR,etal.VehiclerecognitionusingcurvelettransformandSVM[C]//Proc.ofthe4thInternationalConferenceonInformationTechnology.LasVegas,NV,USA:IEEE,2007:516-521.[5]FREUNDY,SCHAPIRERE.Adecision-theoreticgeneralizationofon-linelearningandanapplicationtoboosting[J].JournalofComputerandSystemSciences,1997,55:119-139.[6]LIUWei,ERHAND,SZEGEDYC,etal.SSD:Singleshotmultiboxdetector[C]//EuropeonConferenceonComputerVision(ECCV).Switzerland:Springer,2016:21-37.[7]REDMONJ,DIVVALAS,GIRSHICKR,etal.Youonlylookonce:Unified,real-timeobjectdetection[C]//IEEEConferenceonComputerVisionandPatternRecognition.LasVegas,NV,USA:IEEE,2016:779-788.[8]REDMONJ,FARHADIA.YOLOv3:Anincrementalimprovement[J].arXivpreprintarXiv:1804.02767,2018.[9]LINTY,GOYALP,GIRSHICKR,etal.Focallossfordenseobjectdetection[C]//IEEEInternationalConferenceonComputerVision(ICCV).Venice,Italy:IEEE,2017:2980-2988.[10]GIRSHICKR.FastR-CNN[C]//IEEEInternationalConferenceonComputerVision(ICCV).Santiago,Chile:IEEE,2015:1440-1448.[11]RENShaoqing,HEKaiming,GIRSHICKR,etal.FasterR-CNN:Towardsrealtimeobjectdetectionwithregionproposalnetworks[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2016,39(6):1137-1149.[12]BOCHKOVSKIYA,WANGCY,LIAOHYM.YOLOv4:Optimalspeedandaccuracyofobjectdetection[J].arXivpreprintarXiv:2004.10934,2020.[13]AZHARMIH,ZAMANFHK,TAHIRNM,etal.PeopletrackingsystemusingDeepSORT[C]//10thIEEEInternationalConferenceonControlSystem,ComputingandEngineering(ICCSCE).IEEE,2020:137-141.751第4期李浩伟,等:基于LBP特征与图像显著性的散焦模糊区域检测。
《2024年交通场景下的车辆行人多目标检测与跟踪算法研究》范文
《交通场景下的车辆行人多目标检测与跟踪算法研究》篇一一、引言在现代化交通系统中,对于车辆行人多目标检测与跟踪的准确性以及效率,正变得愈发重要。
对于实现自动驾驶、交通流量分析以及事故预防等应用,多目标检测与跟踪技术发挥着至关重要的作用。
本文将深入探讨交通场景下的车辆行人多目标检测与跟踪算法的研究现状、方法和应用。
二、多目标检测与跟踪的背景和意义在复杂的交通场景中,对车辆和行人多目标进行检测和跟踪是计算机视觉领域的重要研究方向。
这种技术能够实时获取交通场景中的动态信息,为自动驾驶、智能交通系统等提供关键数据支持。
同时,通过多目标检测与跟踪技术,我们可以更好地理解交通流动态,预测可能的交通状况,以实现事故预防和交通优化。
三、多目标检测与跟踪算法研究现状目前,多目标检测与跟踪算法主要包括基于深度学习和传统计算机视觉的方法。
其中,基于深度学习的方法在处理复杂交通场景时表现出色。
例如,卷积神经网络(CNN)在特征提取和目标识别方面具有强大的能力,而循环神经网络(RNN)和长短期记忆网络(LSTM)等在序列数据处理中具有优势,可实现目标的持续跟踪。
四、车辆行人多目标检测算法研究车辆行人多目标检测是利用图像处理技术从交通场景中提取出车辆和行人等目标信息的过程。
常见的检测算法包括基于区域的方法、基于特征的方法以及基于深度学习的方法。
其中,基于深度学习的目标检测算法如Faster R-CNN、YOLO等在准确性和实时性方面表现出色。
这些算法能够自动学习目标的特征表示,从而实现对复杂交通场景中车辆和行人的准确检测。
五、车辆行人多目标跟踪算法研究多目标跟踪是在检测到目标的基础上,通过关联分析等方法实现对多个目标的持续跟踪。
常见的多目标跟踪算法包括基于滤波的方法、基于匹配的方法以及基于深度学习的方法。
其中,基于深度学习的方法通过学习目标的时空特征,实现更准确的跟踪。
同时,利用神经网络模型如Siamese网络等可以实现高效的在线学习和跟踪。
运动的目标识别与跟踪简述
运动的目标识别与跟踪简述运动的目标识别与跟踪是指利用计算机视觉技术对视频中的运动目标进行自动识别和跟踪。
这一技术在各种领域都有着广泛的应用,比如智能监控系统、无人驾驶汽车、体育竞技分析等。
本文将简要介绍运动的目标识别与跟踪的基本原理和常见方法。
运动的目标识别与跟踪主要包括两个方面的内容。
首先是目标识别,即在视频中准确地识别出感兴趣的运动目标。
其次是目标跟踪,即在视频序列中连续地跟踪目标的位置和运动状态。
目标识别和跟踪在实际应用中通常是相互衔接的,目标识别的结果会作为跟踪的输入,而跟踪的结果又会反馈到目标识别中。
目标识别是运动的目标识别与跟踪的第一步,其主要目标是从视频序列中准确地找出目标的位置和外观特征。
在目标识别中,通常会采用目标检测和目标分类两种方法。
目标检测是指在视频帧中定位出目标所在的位置,通常可以采用边缘检测、颜色分割、纹理特征等方法。
目标分类是指对检测到的目标进行分类,通常可以采用模式识别、机器学习、深度学习等方法。
在目标跟踪中,主要任务是连续地跟踪目标在视频序列中的位置和状态。
目标跟踪通常会受到目标运动、遮挡、光照变化等因素的影响,因此需要采用一些高级的图像处理和模型预测技术。
常见的目标跟踪方法包括卡尔曼滤波、粒子滤波、神经网络等。
在实际应用中,运动的目标识别与跟踪技术可以应用于各种领域。
在智能监控系统中,可以利用目标识别和跟踪技术对监控区域内的行人、车辆等目标进行实时监测。
在无人驾驶汽车中,可以利用目标识别和跟踪技术对周围的交通、行人等目标进行感知和决策。
在体育竞技分析中,可以利用目标识别和跟踪技术对运动员的动作、位置等进行实时分析和统计。
运动的目标识别与跟踪是一项重要的计算机视觉技术,其在各种领域都有着广泛的应用前景。
随着计算机视觉和人工智能等技术的不断发展,相信运动的目标识别与跟踪技术会在未来发展出更多的新方法和应用。